Electromagnetic Hysteresis Based Dynamics Model of an Electromagnetically Controlled Torque Coupling



Abstract
:1. Introduction
2. Electromagnetic Force Modeling
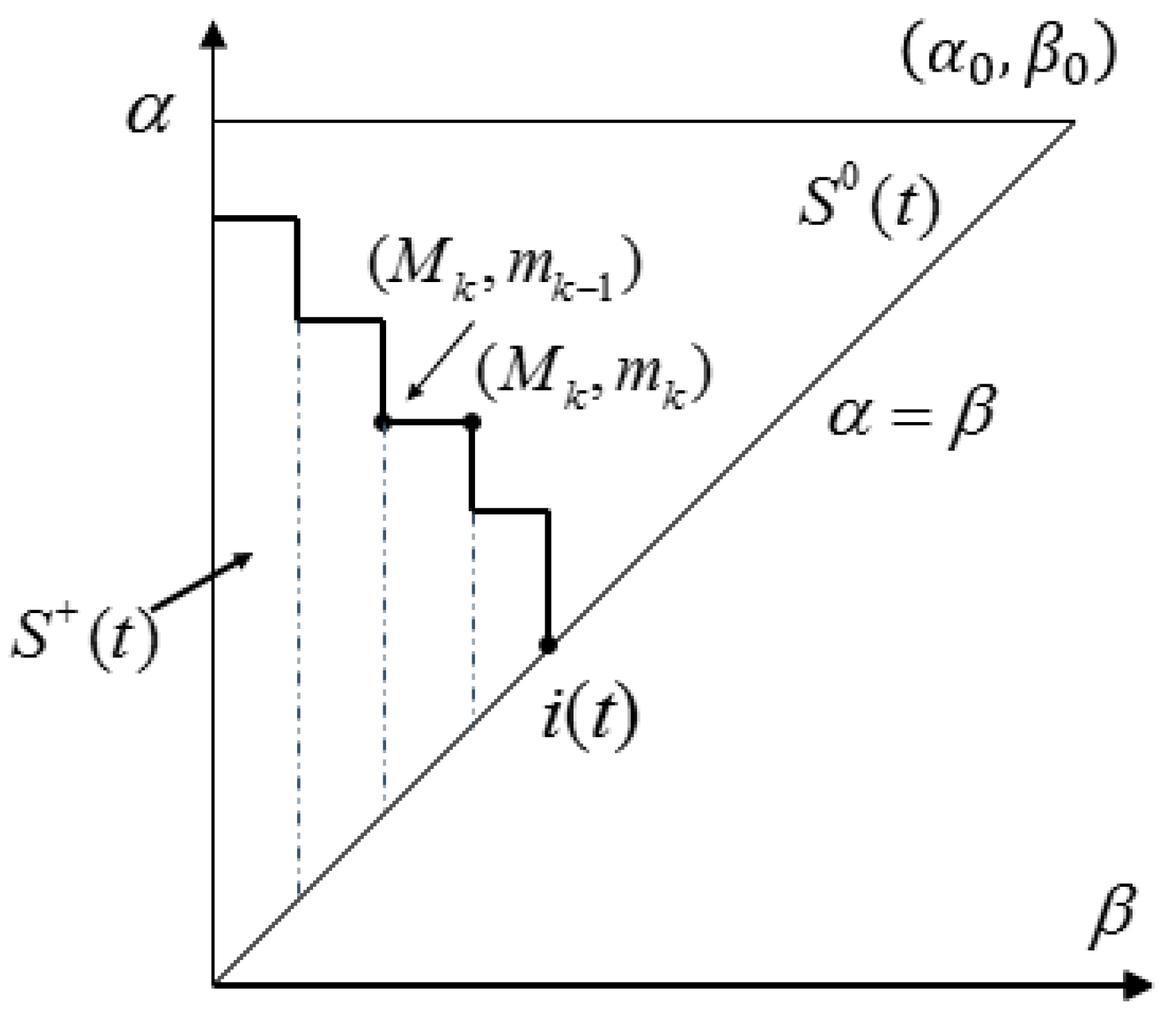
2.1. Hysteresis Modeling
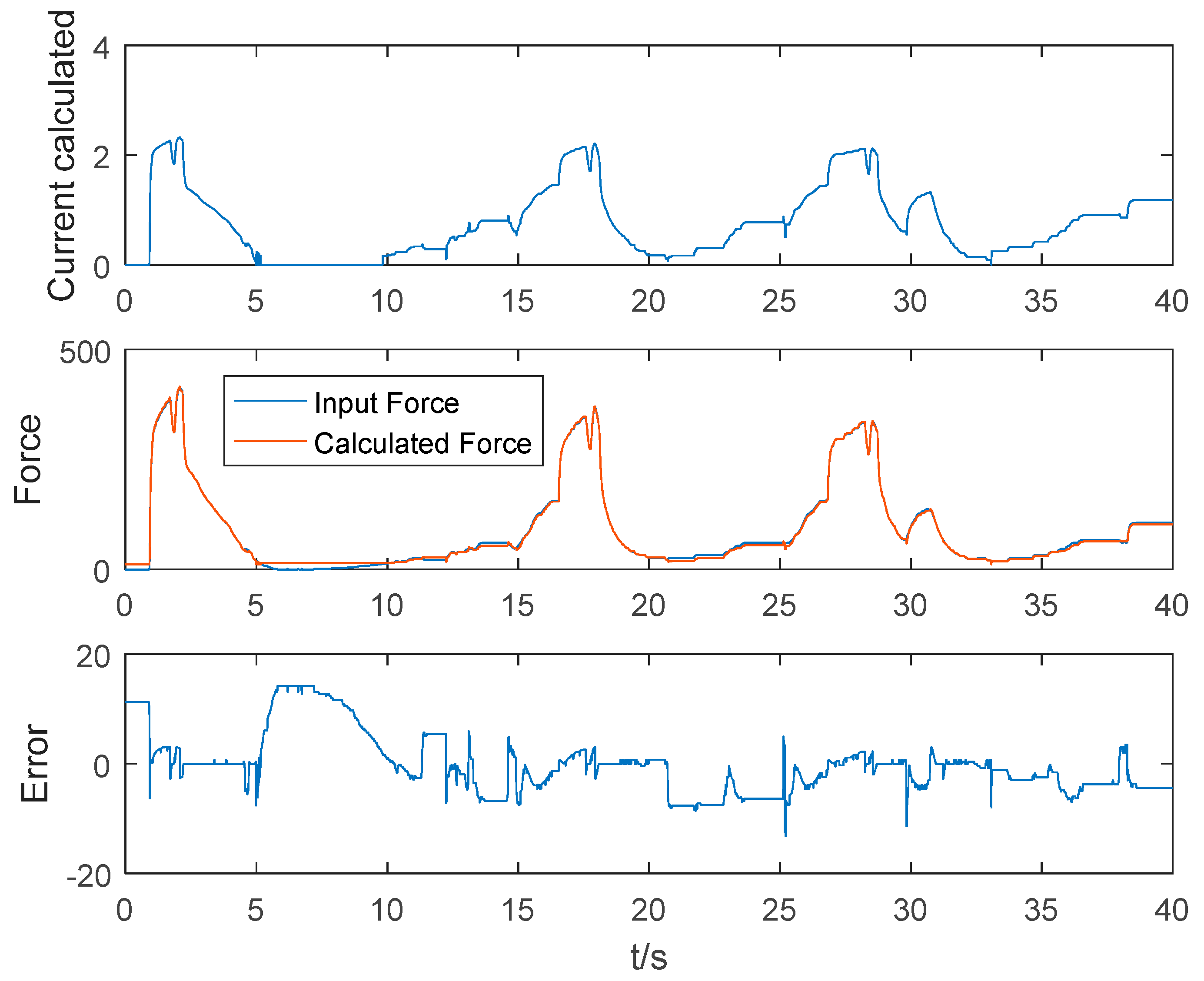
2.2. Verification and Inverse Compensation of Hysteresis Model
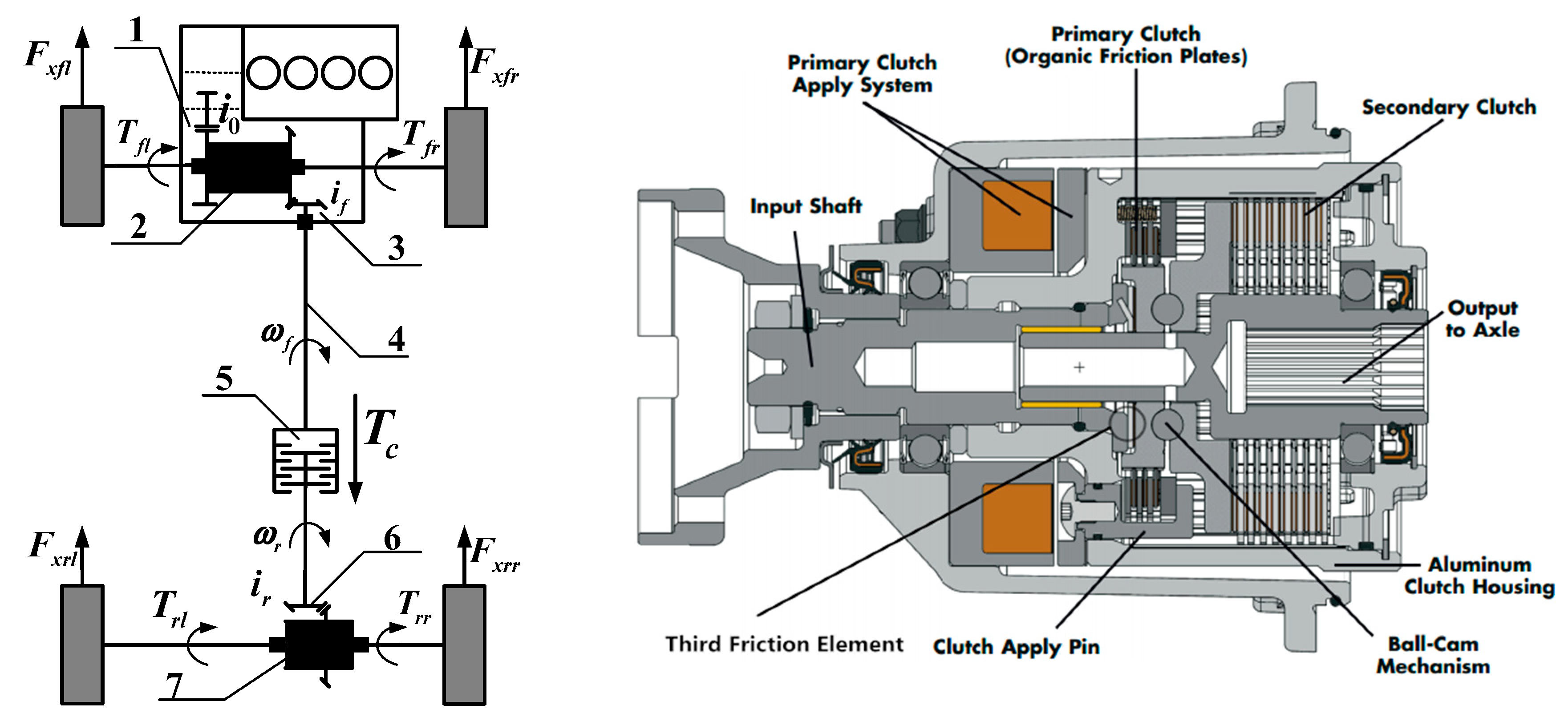
3. EMTC Dynamics Model
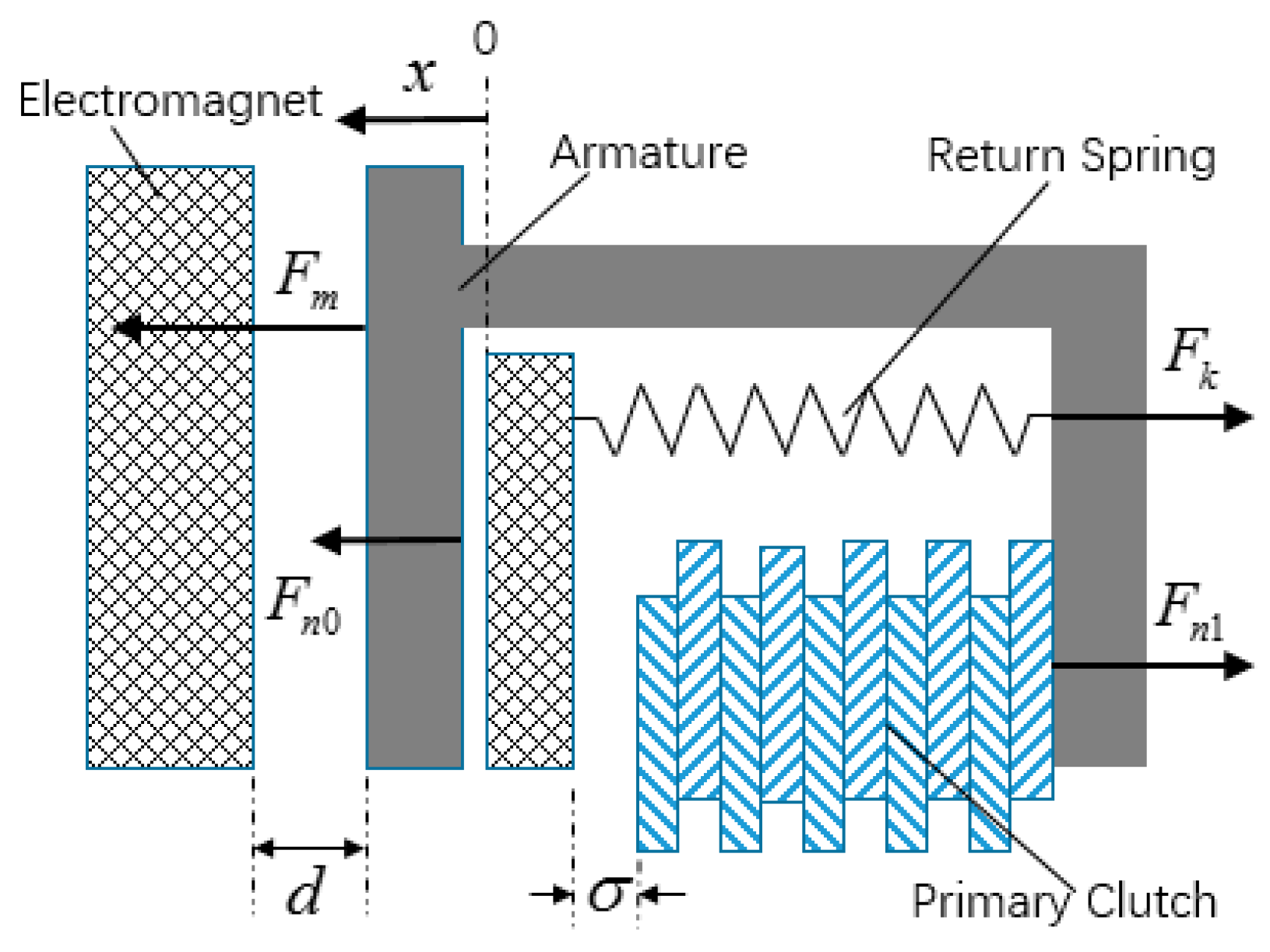
3.1. The Electromagnetic Actuator Model
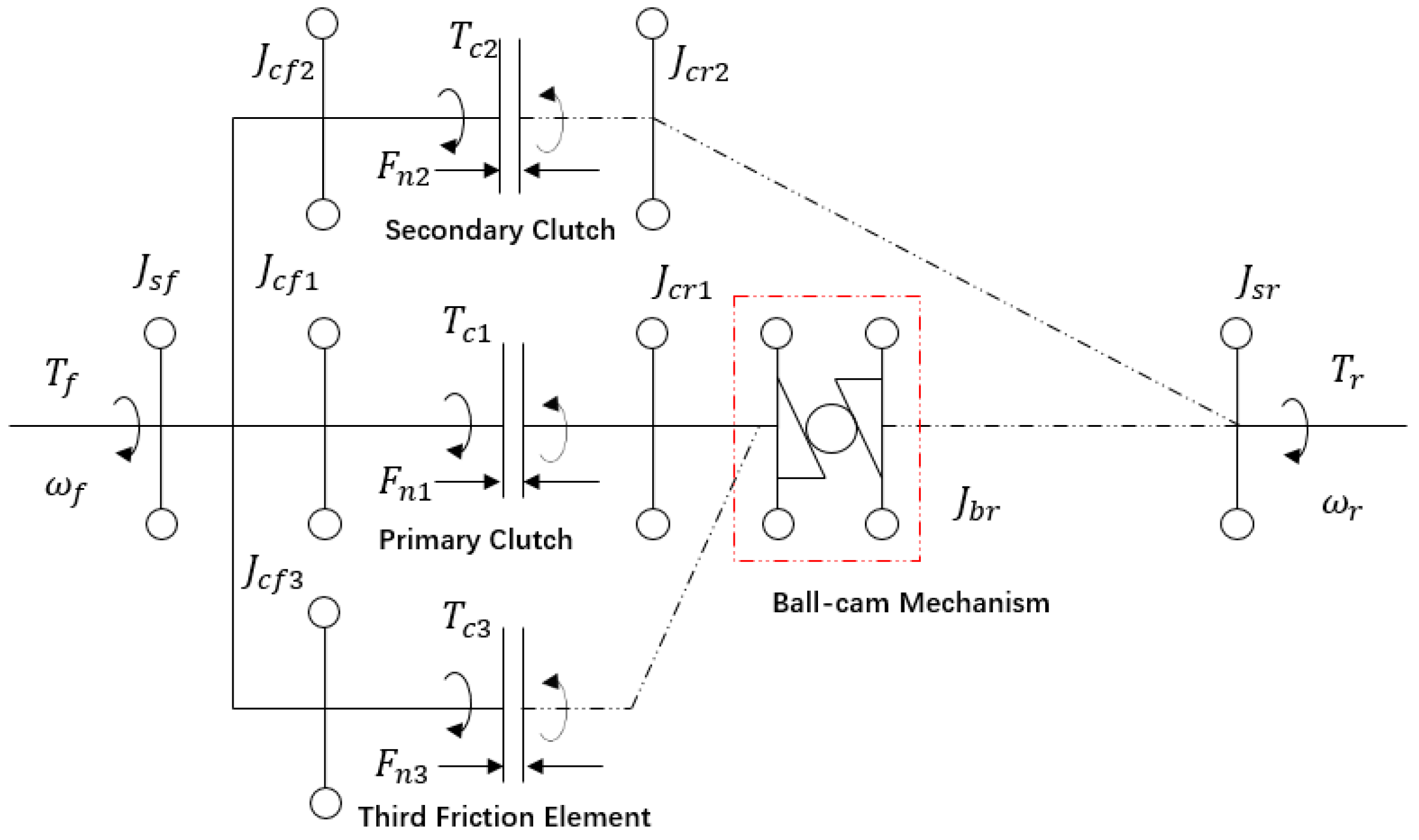
3.2. The Torque Transfer Model
3.2.1. Torque Transfer Model for Slipping Mode
3.2.2. Torque Transfer Model for Locked Mode
- The torque transferred is small enough for the three elements to divide equally:
- The capacity of the third element, , passes through as it doesn’t exceed , and the rest will be taken over by the other two clutches:
- The primary clutch and the third friction element both transmit the maximum of them, and the secondary clutch takes care of the rest:
3.3. Friction and Drag Torque Model
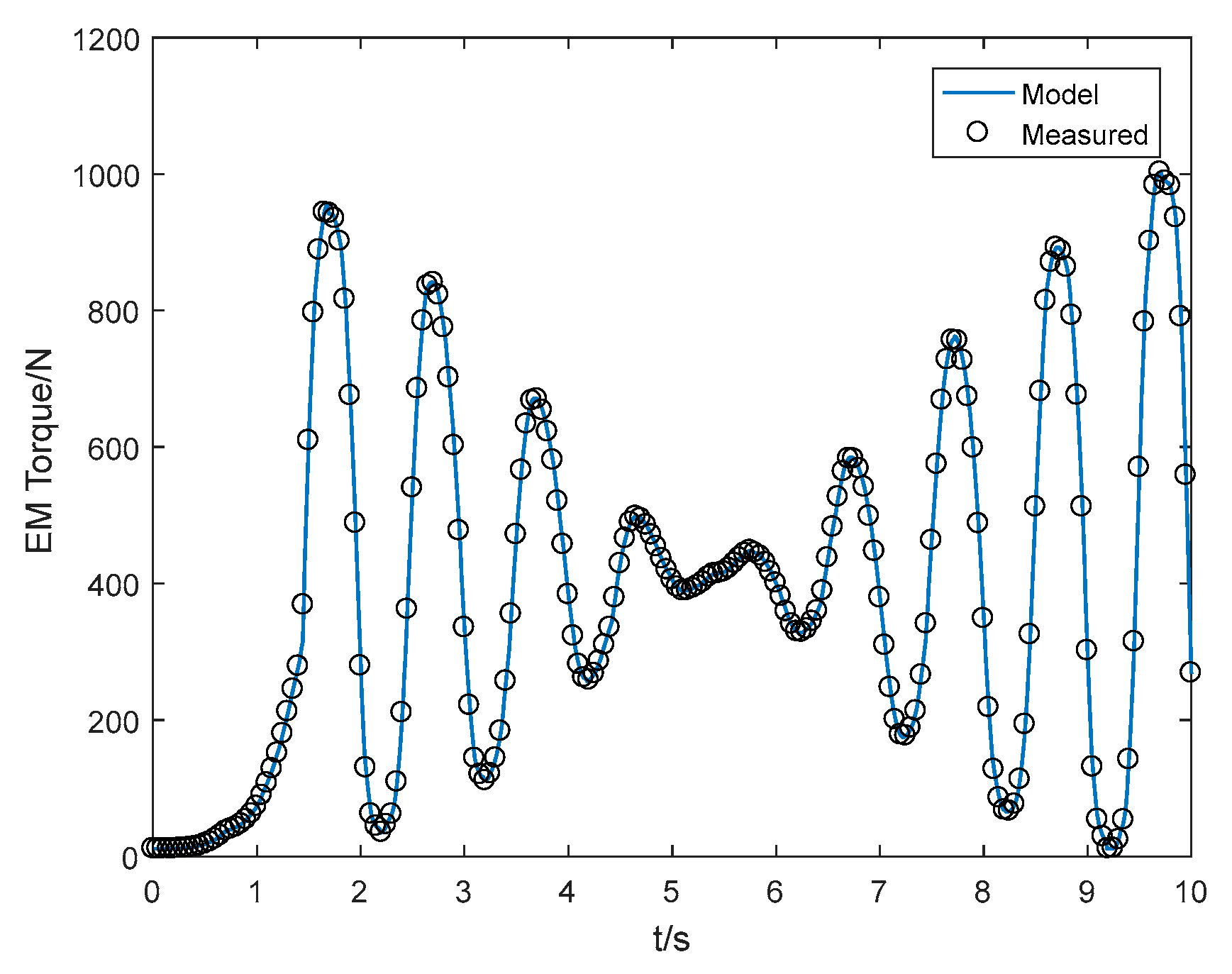
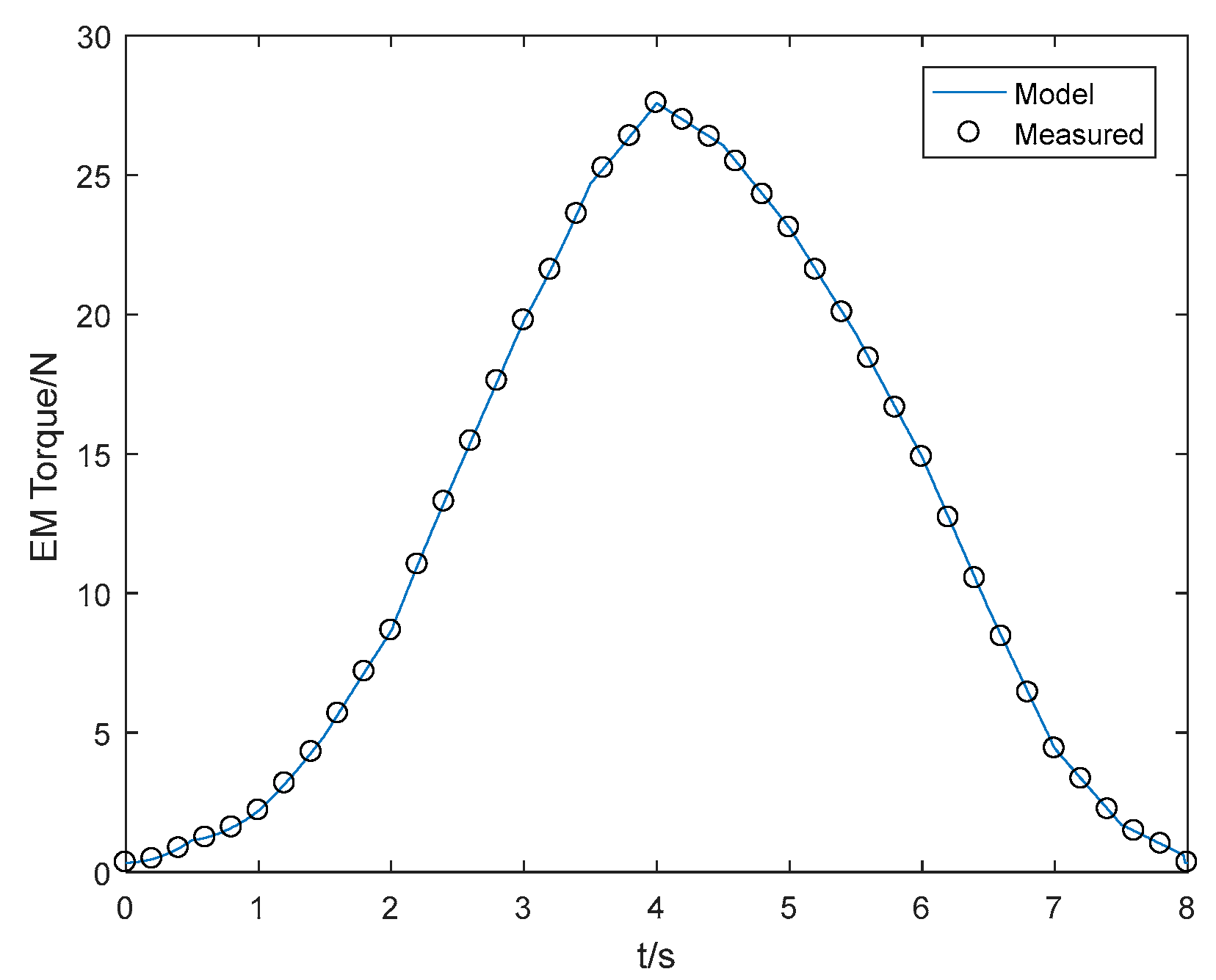
4. Experimental Verification of the Dynamic Model
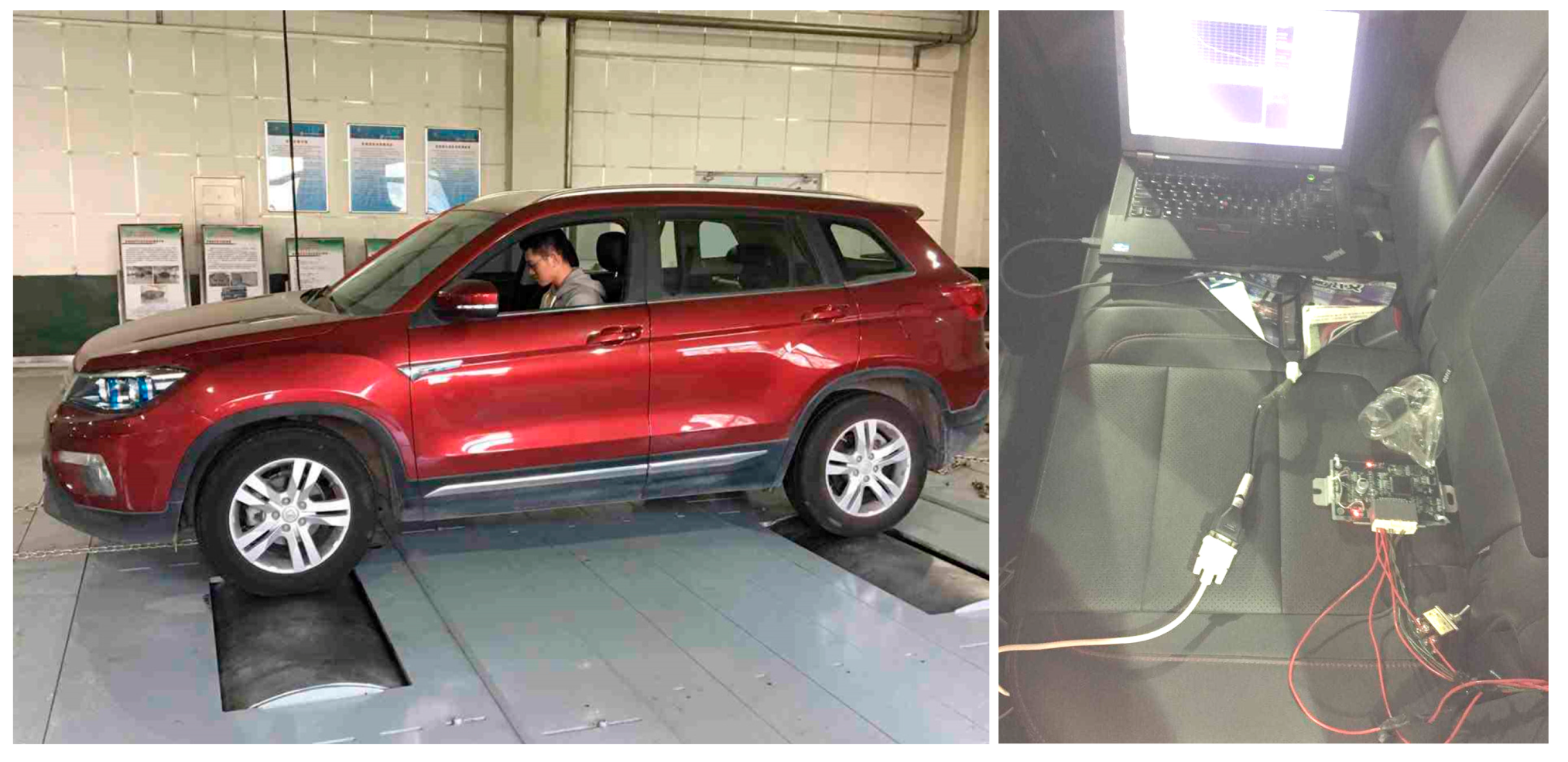
4.1. The Experiment Settings
4.2. Real-Car Experiment
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Wu, D.M.; Li, Y.; Du, C.Q.; Ding, H.T.; Li, Y.; Yang, X.B.; Lu, X.Y. Fast velocity trajectory planning and control algorithm of intelligent 4WD electric vehicle for energy saving using time-based MPC. IET Intell. Transp. Syst. 2018, 13, 153–159. [Google Scholar] [CrossRef]
- Qiu, L.; Qian, L.; Zomorodi, H.; Pisu, P. Design and optimization of equivalent consumption minimization strategy for 4WD hybrid electric vehicles incorporating vehicle connectivity. Sci. China Technol. Sci. 2018, 61, 147–157. [Google Scholar] [CrossRef]
- Zhao, Z.-G.; Zhou, L.-J.; Zhang, J.-T.; Zhu, Q.; Hedrick, J.-K. Distributed and self-adaptive vehicle speed estimation in the composite braking case for four-wheel drive hybrid electric car. Veh. Syst. Dyn. 2017, 55, 1–24. [Google Scholar] [CrossRef]
- Gasbaoui, B.; Nasri, A.; Abdelkhalek, O.; Ghouili, J.; Ghezouani, A. Behavior PEM fuel cell for 4WD electric vehicle under different scenario consideration. Int. J. Hydrogen Energy 2017, 42, 535–543. [Google Scholar] [CrossRef]
- Han, P.; Bao, J.; Ge, S.; Yin, Y.; Ma, C.; Yang, S. Parameter design of an ISG hybrid electric trackless rubber tyred vehicle based on degree of hybridisation. Int. J. Heavy Veh. Syst. 2017, 24, 239. [Google Scholar] [CrossRef]
- Han, K.; Choi, M.; Lee, B.; Choi, S.B. Development of a Traction Control System Using a Special Type of Sliding Mode Controller for Hybrid 4WD Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 264–274. [Google Scholar] [CrossRef]
- Jang, Y.; Lee, M.; Suh, I.-S.; Nam, K. Lateral handling improvement with dynamic curvature control for an independent rear wheel drive EV. Int. J. Automot. Technol. 2017, 18, 505–510. [Google Scholar] [CrossRef] [Green Version]
- Raslavičius, L.; Keršys, A.; Makaras, R. Management of hybrid powertrain dynamics and energy consumption for 2WD, 4WD, and HMMWV vehicles. Renew. Sustain. Energy Rev. 2017, 68, 380–396. [Google Scholar] [CrossRef]
- Kanchwala, H.; Trigell, A.S. Vehicle handling control of an electric vehicle using active torque distribution and rear wheel steering. Int. J. Veh. Des. 2017, 74, 319. [Google Scholar] [CrossRef]
- De Pinto, S.; Camocardi, P.; Gruber, P.; Perlo, P.; Viotto, F.; Sorniotti, A. Torque-Fill Control and Energy Management for a Four-Wheel-Drive Electric Vehicle Layout with Two-Speed Transmissions. IEEE Trans. Ind. Appl. 2017, 53, 447–458. [Google Scholar] [CrossRef]
- Torii, S.; Yaguchi, E.; Ozaki, K.; Jindoh, T.; Owada, M.; Naitoh, G. Electronically Controlled Torque Split System, for 4WD Vehicles. In SAE Technical Paper Series; SAE International: Pennsylvania, PA, USA, 1986. [Google Scholar]
- Mohan, S. All-wheel drive/four-wheel drive systems and strategies. In Proceedings of the Seoul 2000 FISITA World Automotive Congress, Seoul, Korea, 12–15 June 2000. [Google Scholar]
- Cheli, F.; Dellachà, P.; Zorzutti, A. Development of the Control Strategy for an Innovative 4WD Device. In Proceedings of the ASME 8th Biennial Conference on Engineering Systems Design and Analysis, Torino, Italy, 4–7 July 2006; pp. 173–182. [Google Scholar]
- Lee, H. Four-Wheel Drive Control System using a Clutchless Centre Limited Slip Differential. Proc. Inst. Mech. Eng. Part D: J. Automob. Eng. 2006, 220, 665–681. [Google Scholar] [CrossRef]
- Piyabongkarn, D.; Lew, J.Y.; Rajamani, R.; Grogg, J.A.; Yuan, Q. On the Use of Torque-Biasing Systems for Electronic Stability Control: Limitations and Possibilities. IEEE Trans. Control. Syst. Technol. 2007, 15, 581–589. [Google Scholar] [CrossRef]
- Ando, H.; Murakami, T. AWD Vehicle Simulation with the Intelligent Torque Controlled Coupling as a Fully Controllable AWD System. In SAE Technical Paper Series; SAE International: Pennsylvania, PA, USA, 2005. [Google Scholar]
- Barlage, J.; Mastie, J.; Niffenegger, D. Development of NexTrac™ Electronic Driveline Coupling for Front-Wheel Drive Based All-Wheel Drive Applications (No. 2007-01-0660); SAE Technical Paper; SAE International: Pennsylvania, PA, USA, 2007. [Google Scholar]
- Vantsevich, V.V.; Shyrokau, B.N. Autonomously operated power-dividing unit for driveline modeling and AWD vehicle dynamics control. In Proceedings of the ASME 2008 Dynamic Systems and Control Conference, Ann Arbor, MI, USA, 20–22 October 2008; pp. 891–898. [Google Scholar]
- Ando, J.; Tsuda, T.; Ando, H.; Niikawa, Y.; Suzuki, K. Development of Third-Generation Electronically Controlled AWD Coupling with New High-Performance Electromagnetic Clutch. SAE Int. J. Passeng. Cars Mech. Syst. 2014, 7, 882–887. [Google Scholar] [CrossRef]
- Iqbal, S.; Al-Bender, F.; Pluymers, B.; Desmet, W. Model for predicting drag torque in open multi-disks wet clutches. J. fluids Eng. 2014, 136, 021103-1–021103-11. [Google Scholar] [CrossRef]
- Völkel, K.; Wohlleber, F.; Pflaum, H.; Stahl, K. Cooling performance of wet multi-plate disk clutches in modern applications [Kühlverhalten nasslaufender Lamellenkupplungen in neuen Anwendungen]. Forsch. Ing./Eng. Res. 2018, 82, 1–7. [Google Scholar]
- Maroonian, A.; Tamura, T.; Fuchs, R. Modeling and simulation for the dynamic analysis of an electronically controlled torque coupling. IFAC Proc. 2013, 46, 464–469. [Google Scholar] [CrossRef]
- Mayergoyz, I.D. Mathematical Models of Hysteresis and Their Applications; Academic Press: Pittsburgh, PA, USA, 2003. [Google Scholar]
- Menq, C.H.; Mittal, S. Hysteresis compensation in electromagnetic actuators through Preisach model inversion. IEEE/ASME Trans. Mechatron. 2000, 5, 394–409. [Google Scholar]
- Mayergoyz, I.D. Mathematical Models of Hysteresis; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Zhong, J. Study on Control of the NextracEM Inter-Axle Coupling for On-Demand All-Wheel-Drive Vehicles; Beijing Institute of Technology: Beijing, China, 2016. [Google Scholar]
- De Wit, C.C.; Olsson, H.; Astrom, K.; Lischinsky, P. A new model for control of systems with friction. IEEE Trans. Autom. Control. 1995, 40, 419–425. [Google Scholar] [CrossRef]
- Venu, M.K.K. Wet Clutch Modelling Techniques. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2013. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Unit | Value |
|---|---|---|
| Curb Weight | kg | 2162 |
| CM to front axle | mm | 1104.3 |
| CM to rear axle | mm | 1595.7 |
| Height of center of mass | mm | 670 |
| Wheel base | mm | 2700 |
| Transmission gear ratio | - | (1st)4.044/(2nd)2.371/(3rd)1.556/(4th)1.159/(5th)0.852/(6th)0.672/(R)3.19 |
| Front main retarder ratio | - | 3.75 |
| Rear main retarder ratio | - | 2.533 |
| Engine power | kw | 125 |
| Tyre size | - | 225/65R17 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, J.; Chen, S.; Qi, Z.; Zhong, J.; Liu, Z. Electromagnetic Hysteresis Based Dynamics Model of an Electromagnetically Controlled Torque Coupling. Processes 2019, 7, 557. https://doi.org/10.3390/pr7090557
Feng J, Chen S, Qi Z, Zhong J, Liu Z. Electromagnetic Hysteresis Based Dynamics Model of an Electromagnetically Controlled Torque Coupling. Processes. 2019; 7(9):557. https://doi.org/10.3390/pr7090557
Chicago/Turabian StyleFeng, Jianbo, Sizhong Chen, Zhiquan Qi, Jiaming Zhong, and Zheng Liu. 2019. "Electromagnetic Hysteresis Based Dynamics Model of an Electromagnetically Controlled Torque Coupling" Processes 7, no. 9: 557. https://doi.org/10.3390/pr7090557
APA StyleFeng, J., Chen, S., Qi, Z., Zhong, J., & Liu, Z. (2019). Electromagnetic Hysteresis Based Dynamics Model of an Electromagnetically Controlled Torque Coupling. Processes, 7(9), 557. https://doi.org/10.3390/pr7090557