An Optimization Approach Considering User Utility for the PV-Storage Charging Station Planning Process

Abstract
:1. Introduction
2. Bi-Level Optimization Model for PV-Storage Charging Station Planning
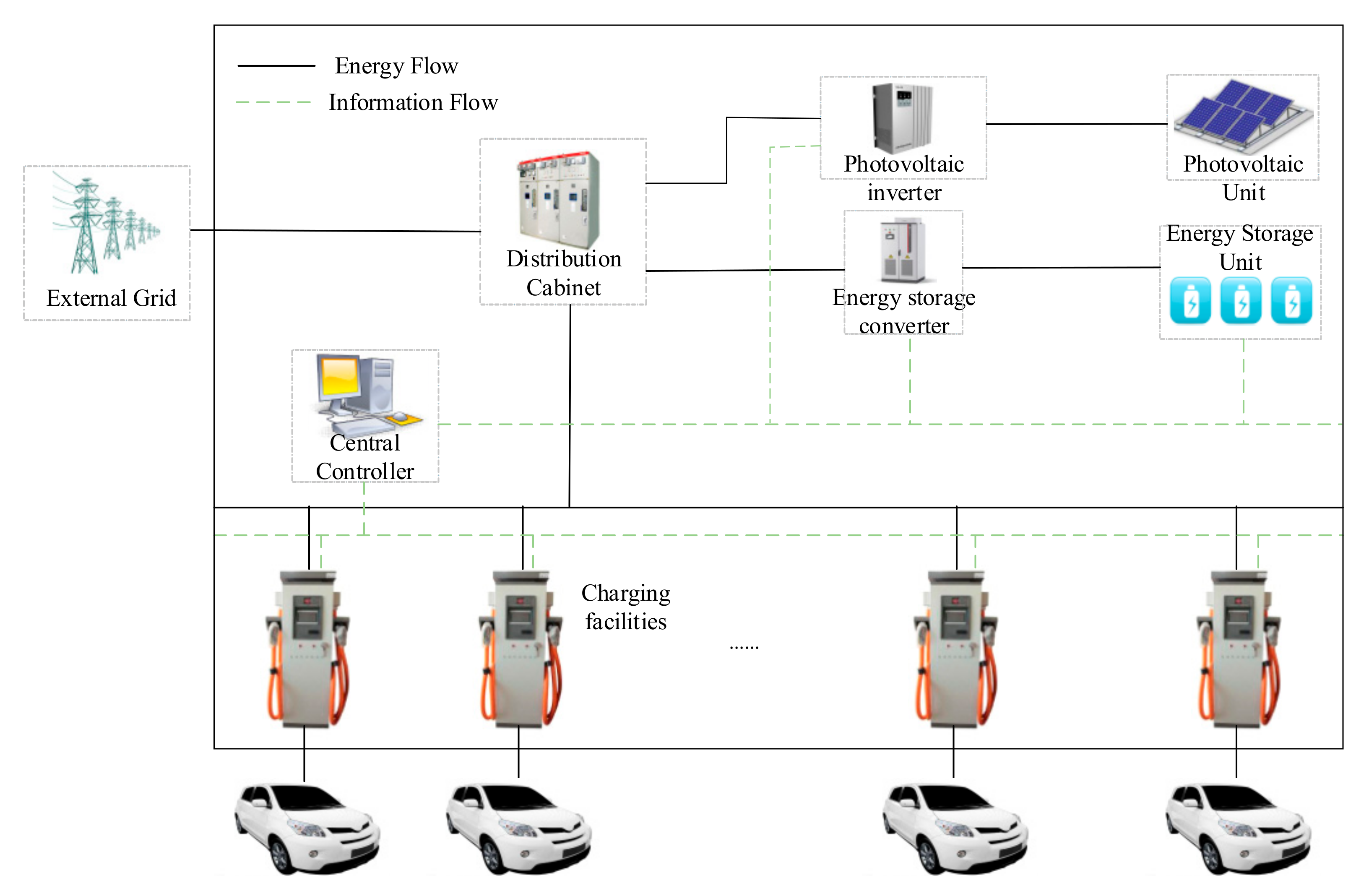
2.1. PV-Storage Charging Station System
2.2. Upper-Level Model of PV-Storage Charging Station Planning
2.2.1. Objective Function
2.2.2. Constraints
2.3. Lower-Level Model for PV-Storage Charging Station Planning
2.3.1. Objective Function
2.3.2. Constraints
3. Algorithms for Bi-Level PV-Storage Charging Station Planning
3.1. KKT Algorithm Analysis
3.2. Bi-Level Optimization Model Solution
3.2.1. Linear Description of Lower-Level Problem
3.2.2. Reducing a Bi-Level Problem to a Simple Level Problem
3.2.3. Linear Description of Lower-Level Problem
4. Case Analysis
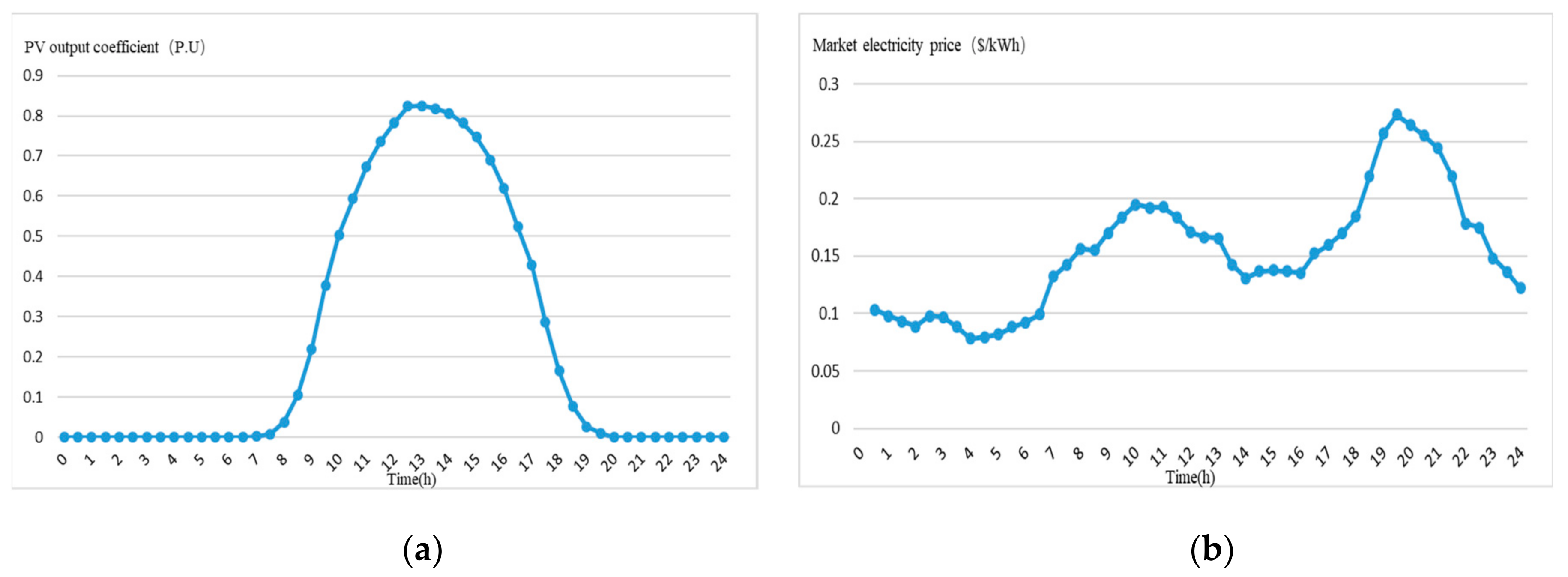
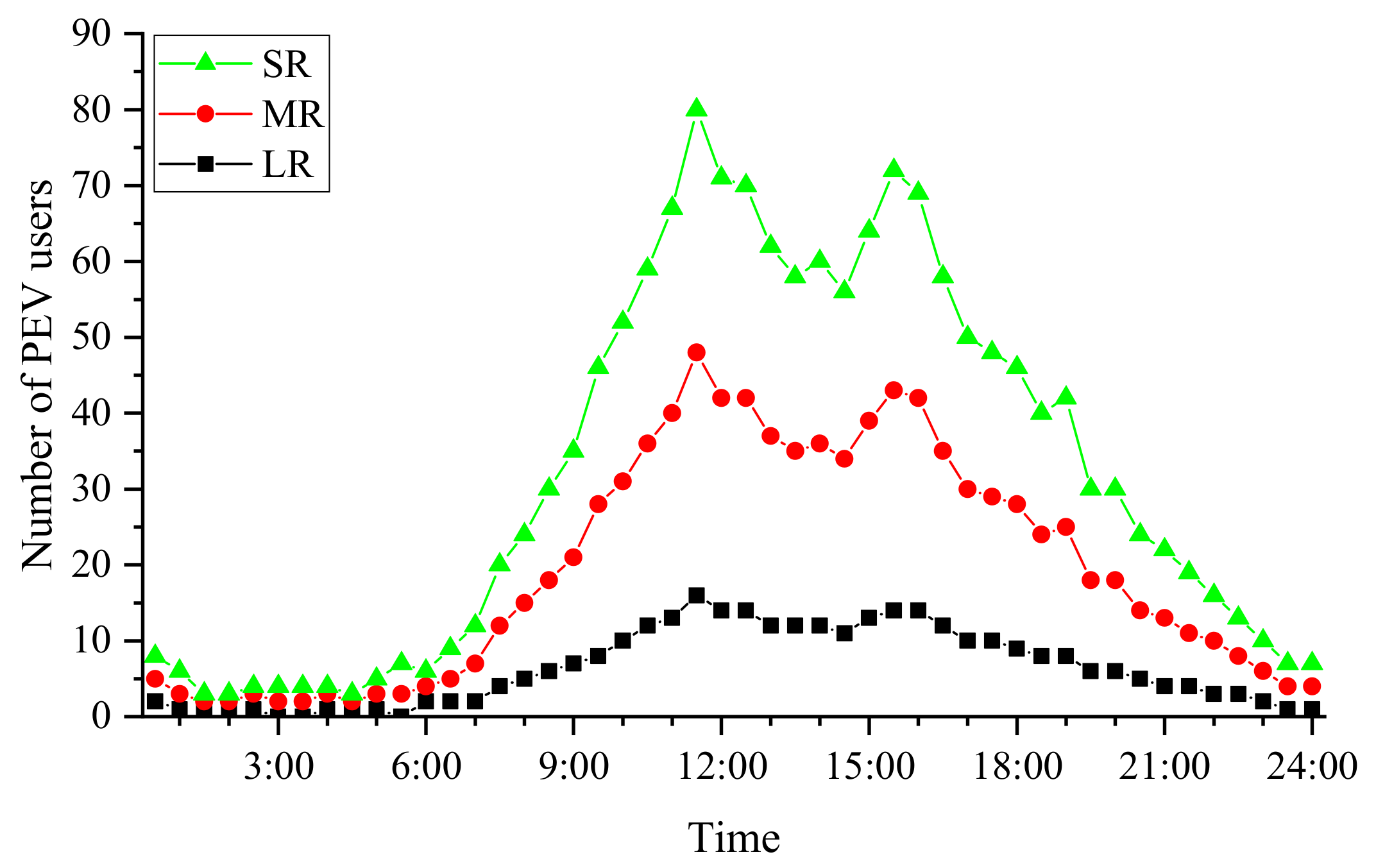
4.1. Basic Data
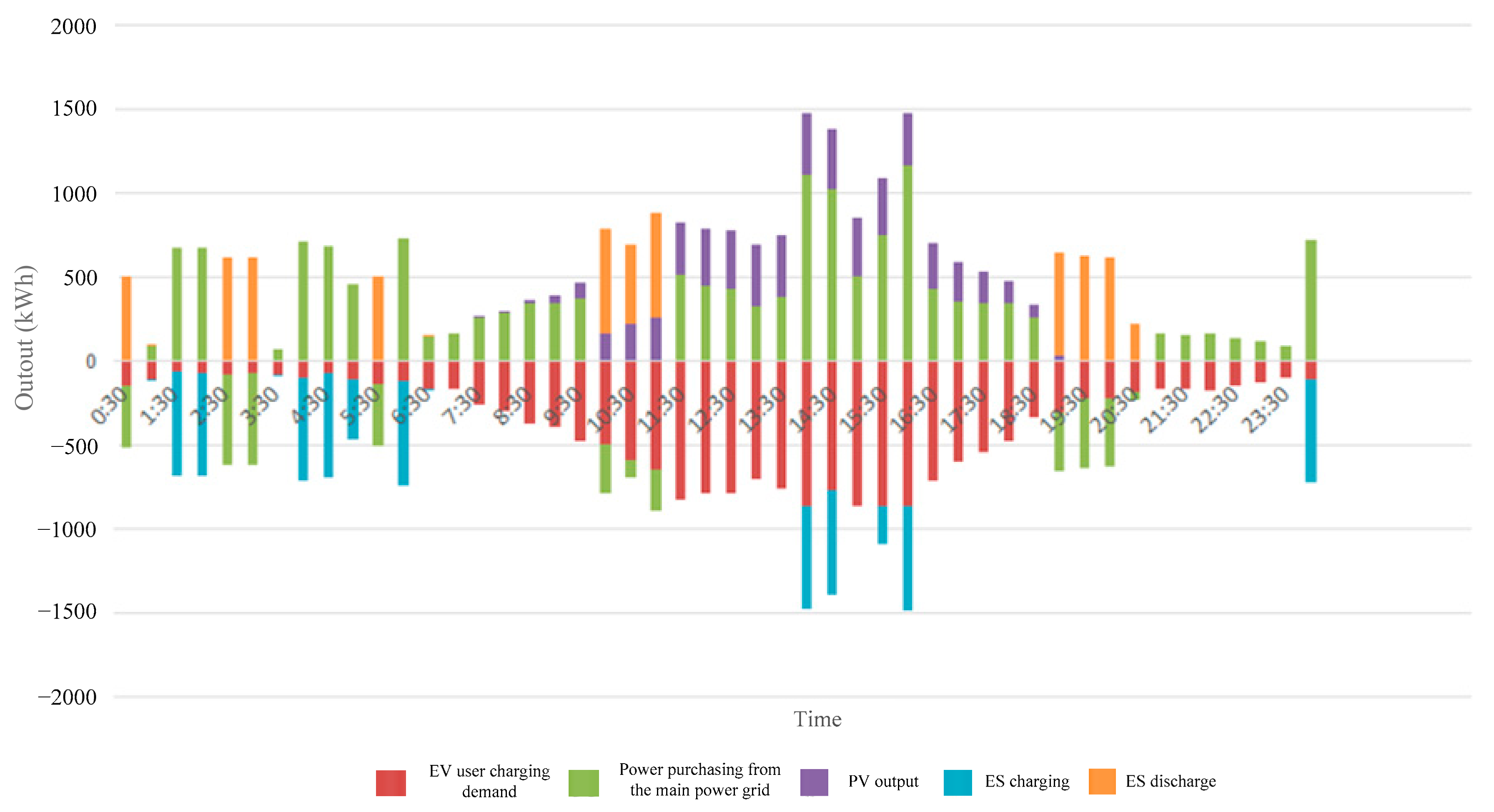
4.2. Simulation Example Results
4.3. Models Comparison
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Parameters | |
| / | Unit power investment cost of CF, PV, and ES facilities ($/kW) |
| / | Annual unit operation cost of CF, PV facilities ($/kW/years) |
| Annual unit operation cost of ES facilities ($/kWh/years) | |
| Annual unit operation cost of ES facilities ($/kWh/years) | |
| / | Lower/upper limit of EV charge level (kWh) |
| / | Maximum installed storage capacity/power of ES (kWh; kW) |
| // | Annualization operators |
| / | Maximum capacity of installed CF/RDG (kW) |
| Rated capacity of distribution transformer (kW) | |
| / | Lower/upper SOC limit for ES (%) |
| Marginal utility of EV users ($/kWh) | |
| Upper limit of charging tariff ($) | |
| Δt | Duration of time period (0.5 h) |
| Charging efficiency of CF (%) | |
| / | ES operation efficiency (%) |
| Number of days in a year | |
| EV uptake | |
| Ratio of RDG output to installed capacity | |
| market price ($/kWh) | |
| D | Facility lifetime (years) |
| ζ | Discount rate (%) |
| Variables | |
| Required EV charge level (kWh) | |
| Stored energy in ES units (kWh) | |
| ES storage capacity/power (kWh; kW) | |
| Total EV charging power (kW) | |
| ES charging/discharging power (kW) | |
| Exchanged power with grid (kW) | |
| Installed capacity of CF/RDG (kW) | |
| Total power output of RDG (kW) | |
| Offered charging tariff ($/kWh) |
References
- Cai, W.; Lai, K.-H.; Liu, C.; Wei, F.; Ma, M.; Jia, S.; Jiang, Z.; Lv, L. Promoting sustainability of manufacturing industry through the lean energy-saving and emission-reduction strategy. Sci. Total Environ. 2019, 665, 23–32. [Google Scholar] [CrossRef] [PubMed]
- Rahman, I.; Vasant, P.M.; Singh, B.S.M.; Abdullah-Al-Wadud, M.; Adnan, N. Review of recent trends in optimization techniques for plug-in hybrid, and electric vehicle charging infrastructures. Renew. Sustain. Energy Rev. 2016, 58, 1039–1047. [Google Scholar] [CrossRef]
- Huang, F.T.; Weng, G.Q.; Nan, Y.R.; Yang, X.D.; Chen, D. Optimization of Electric Vehicle Charging Stations Based on Improve Cloud Adaptive Particle Swarm in Distribution Network with Multiple DG. Chin. Soc. Electr. Eng. 2018, 38, 514–525. [Google Scholar]
- Liu, C.; Liu, H.; Li, X.L.; Zhang, J.; Li, K.; Zhang, J.; Zhang, X. Multi-objective EV charging station planning with consideration of road network reliability and distribution network reliability. Electr. Power Autom. Equip. 2017, 37, 28–34. [Google Scholar]
- Zheng, Y.; Dong, Z.Y.; Xu, Y.; Meng, K.; Zhao, J.H.; Qiu, J. Electric Vehicle Battery Charging/Swap Stations in Distribution Systems: Comparison Study and Optimal Planning. IEEE Trans. Power Syst. 2013, 29, 221–229. [Google Scholar] [CrossRef]
- Ge, S.Y.; Zhu, L.W.; Liu, H.; Li, T.; Liu, C. Optimal Deployment of Electric Vehicle Charging Stations on the Highway Based on Dynamic Traffic Simulation. Trans. China Electrotech. Soc. 2018, 33, 2991–3001. [Google Scholar]
- Feng, Y.; Zhao, X.; Ren, G.; Zhao, J. Planning Method for Urban Centralized Charging Stations. Proc. CSU EPSA 2018, 30, 58–61. [Google Scholar]
- Yang, Z.Z.; Gao, Z.Y. Location Method of Electric Vehicle Charging Station Based on Data Driven. J. Transp. Syst. Eng. Inf. Technol. 2018, 18, 143–150. [Google Scholar]
- Sadeghi-Barzani, P.; Rajabi-Ghahnavieh, A.; Kazemi-Karegar, H. Optimal fast charging station placing and sizing. Appl. Energy 2014, 125, 289–299. [Google Scholar] [CrossRef]
- Xiang, Y.; Liu, J.; Li, R.; Li, F.; Gu, C.; Tang, S. Economic planning of electric vehicle charging stations considering traffic constraints and load profile templates. Appl. Energy 2016, 178, 647–659. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.W.; Qiang, W.; Wen, X.L.; Li, H.Z. Planning of Electric Vehicle Charging Station Considering V2G Mode. Mod. Electr. Power 2019, 36, 71–78. [Google Scholar] [CrossRef]
- Liu, Z.P.; Wen, F.Z.; Xue, Y.S.; Xin, J.B. Optimal Siting and Sizing of Electric Vehicle Charging Stations. Electr. Power Autom. 2012, 36, 54–59. [Google Scholar]
- Guo, S.; Zhao, H. Optimal site selection of electric vehicle charging station by using fuzzy TOPSIS based on sustainability perspective. Appl. Energy 2015, 158, 390–402. [Google Scholar] [CrossRef]
- Sun, Y.; Ding, M.S.; Liu, J.S.; Yang, Y.B.; Xu, X.H.; Xu, Q.S.; Shi, S.S. Optimal Planning of the Capacity and Site of EV Charing Facilities by the Analytical Hierarchy Process. Electr. Meas. Instrum. 2014, 51, 114–119. [Google Scholar]
- Cheng, J. Optimal Configuration and Protection of Optical Storage Capacity of Photovoltaic Electric Vehicle Charging Station. Master’s Thesis, Nanjing Normal University, Nanjing, China, May 2018. [Google Scholar]
- Lu, J.L.; Yang, Y.; Wang, Y.; He, T.X. Copula-based Capacity Configuration of Energy Storage System for A PV-Assisted Electric Vehicles Charging Station. Acta Energ. Sol. Sin. 2016, 37, 780–786. [Google Scholar]
- Li, W.C.; Tong, Y.B.; Zhang, W.G. Energy Storage Capacity Allocation Method of Electric Vehicle Charging Station Considering Battery Life. Adv. Technol. Electr. Eng. Energy 2019, 39, 55–63. [Google Scholar]
- Chen, Z.; Xiao, X.N.; Lu, X.Y.; Liu, N.; Zhang, J.H. Multi-Objective Optimization for Capacity Configuration of PV-Based Electric Vehicle Charging Stations. Trans. China Electrotech. Soc. 2013, 28, 238–248. [Google Scholar]
- Meng, X.Y.; Zhang, W.G.; Bao, Y.; Huang, M.; Yuan, R.M.; Chen, Z. Optimal Configuration of Charging Facility for Electric Vehicle Fast Charging Station Considering Charging Power. Electr. Power Autom. Equip. 2018, 38, 28–34. [Google Scholar]
- Gunter, S.J.; Afridi, K.K.; Perreault, D.J. Optimal Design of Grid-Connected PEV Charging Systems with Integrated Distributed Resources. IEEE Trans. Smart Grid 2013, 4, 956–967. [Google Scholar] [CrossRef]
- Nguyen, D.T.; Nguyen, H.T.; Le, L.B. Dynamic Pricing Design for Demand Response Integration in Power Distribution Networks. IEEE Trans. Power Syst. 2016, 31, 3457–3472. [Google Scholar] [CrossRef]
- Kazempour, S.J.; Conejo, A.J.; Ruiz, C. Strategic Bidding for a Large Consumer. IEEE Trans. Power Syst. 2015, 30, 848–856. [Google Scholar] [CrossRef]
- Sinha, A.; Malo, P.; Deb, K. A Review on Bilevel Optimization: From Classical to Evolutionary Approaches and Applications. IEEE Trans. Evol. Comput. 2018, 22, 276–295. [Google Scholar] [CrossRef]
- Fortuny-Amat, J.; Mccarl, B. A Representation and Economic Interpretation of a Two-Level Programming Problem. J. Oper. Res. Soc. 1981, 32, 783–792. [Google Scholar] [CrossRef]
- Sherali, H.D.; Tuncbilek, C.H. New reformulation linearization/convexification relaxations for univariate and multivariate polynomial programming problems. Oper. Res. Lett. 1997, 21, 1–9. [Google Scholar] [CrossRef]
- Sherali, H.D.; Dalkiran, E.; Liberti, L. Reduced RLT representations for nonconvex polynomial programming problems. J. Glob. Optim. 2012, 52, 447–469. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment Type | Technical Parameters | Cost Parameters |
|---|---|---|
| Photovoltaic | d = 20 years | = $870/kW = $12/kW/years |
| Lithium battery | d = 20 years = = 93% = 30% = 90% | = $200/kW = $143/kWh = $0.8/kWh/years |
| Charging pile | d = 20 years = 95% | = $100/kW = $6/kW/years |
| Parameter | User Type | ||
|---|---|---|---|
| SR | MR | LR | |
| 30% | 40% | 50% | |
| 20 km | 50 km | 100 km | |
| Planning Results | PV Installed Power (kW) | CF Installed Power (kW) | ES Installed Power and Storage Capacity (kW/kWh) | Daily Electricity Sales (kWh) |
| 500 | 862 | 616/900 | 8764 | |
| Annual Investment Cost ($) | Annual Operation and Maintenance Cost ($) | Annual Revenue ($) | Annual Net Revenue ($) | |
| 79,650 | 11,839 | 844,029 | 752,485 |
| Scheme I | Scheme II | |
|---|---|---|
| Planning type | Single-level planning | Bi-level planning |
| Electricity price | 0.35 $/kWh | Optimized price |
| Scheme I | Scheme I Without ES | Scheme II | |
|---|---|---|---|
| CSO electricity price ($/kWh) | 0.35 | 0.35 | Figure 7 |
| CF installed power (kW) | 1154 | 1154 | 862 |
| PV installed power (kW) | 500 | 500 | 500 |
| ES installed power (kW) | 846 | - | 545 |
| ES installed storage capacity (kWh) | 900 | - | 900 |
| Investment cost ($) | 87,376 | 56,691 | 79,650 |
| Operation and maintenance cost ($) | 13,644 | 12,924 | 11,839 |
| Total revenue ($) | 802,991 | 590,572 | 844,029 |
| Net revenue ($) | 701,971 | 520,975 | 752,485 |
| PV output (kWh) | 2625 | 2625 | 2625 |
| PV output (%) | 22.6% | 22.6% | 29.9% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Dong, H.; Wang, S.; Lan, M.; Zeng, M.; Zhang, S.; Yang, M.; Yin, S. An Optimization Approach Considering User Utility for the PV-Storage Charging Station Planning Process. Processes 2020, 8, 83. https://doi.org/10.3390/pr8010083
Liu Y, Dong H, Wang S, Lan M, Zeng M, Zhang S, Yang M, Yin S. An Optimization Approach Considering User Utility for the PV-Storage Charging Station Planning Process. Processes. 2020; 8(1):83. https://doi.org/10.3390/pr8010083
Chicago/Turabian StyleLiu, Yingxin, Houqi Dong, Shengyan Wang, Mengxin Lan, Ming Zeng, Shuo Zhang, Meng Yang, and Shuo Yin. 2020. "An Optimization Approach Considering User Utility for the PV-Storage Charging Station Planning Process" Processes 8, no. 1: 83. https://doi.org/10.3390/pr8010083
APA StyleLiu, Y., Dong, H., Wang, S., Lan, M., Zeng, M., Zhang, S., Yang, M., & Yin, S. (2020). An Optimization Approach Considering User Utility for the PV-Storage Charging Station Planning Process. Processes, 8(1), 83. https://doi.org/10.3390/pr8010083