1. Introduction
The electricity demand is rapidly increasing due to growth in population and the risk of increasing electricity bills and tariffs. These issues lead to encourage energy system designers to a transformation of technology in terms of “leaving the grid” or “living in off-grid” [
1,
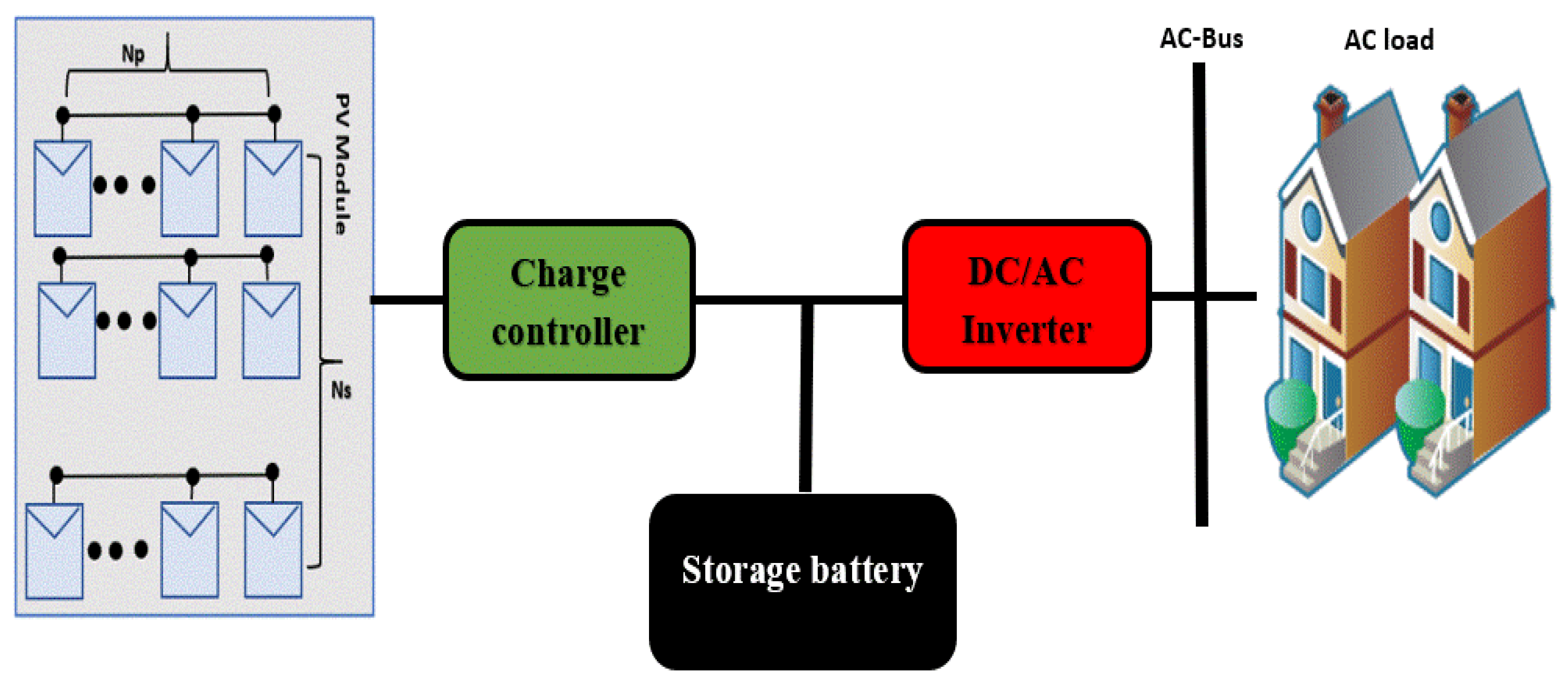
2]. The standalone photovoltaic (SAPV) system is considered one of the most important renewable, sustainable, clean, and environmentally friendly energy sources. However, SAPV systems need to be optimally designed in order to maximize their reliability and minimize the total cost of the system [
3,
4,
5,
6]. Therefore, an efficient sizing of a SAPV system is essential in order to supply the demanded electricity. The optimal design of the SAPV system strongly depends on the availability of the meteorological and hourly load demand. In addition, it is necessary for it to be developed on the basis of technical, economic, and environmental criteria so that the number of photovoltaic (PV) arrays, number of the storage batteries, the capacity of the converter and inverter, and the PV tilt angle should be carefully chosen.
In typical standalone off-grid PV systems, the storage battery plays a significant role not only in increasing the reliability of the SAPV system but also in reducing the total capital cost during a specific period of time. Therefore, the storage battery should be optimally chosen in order to operate on the basis of a high level of reliability and lowest cost. Accordingly, Elena et al. [
7] compared three types of storage batteries in order to choose a well-suited one for the off-grid renewable energy systems. The types of storage batteries used were lead–acid, lithium cobalt oxide (LCO), LCO-lithium nickel manganese cobalt oxide composite (LCO-NMC), and lithium-ion phosphate (LFP). Experiment measurements were performed using a current of PV array and wind turbine. The results in [
7] indicated that LFP battery is more accepting of variable charges and more cost-effective. However, the authors of [
7] did not consider the life cycle cost period for the system. In [
8], the authors studied the impact of increasing suppressed demand (SD) by 20% and 50% in three remote applications: a household, a school, and a health center in Bolivia. Loss of power supply probability (LPSP) was employed in order to calculate the reliability of the system, and the cost of the PV system hardware was set as 2.5 USD/
. The authors of [
8] claimed that for the household and school, increasing the PV capacity was more cost-effective, but this led to raising the battery aging rate using a lithium-ion battery. However, the supplied energy to the load demand depends on the energy generated by the PV arrays to the storage battery, which may lead to reduction of the lifetime of the battery by increasing the capital cost. Moreover, the cost of the system’s components was assumed as being constant.
Various methods have been carried out by researchers to optimize the sizing of the SAPV system such as intuitive, numerical, analytical, artificial intelligence, and hybrid methods [
9,
10,
11,
12]. In light of optimally sizing of the SAPV system, multi-objectives optimization methods can rarely be found in the literature. In addition, the used methods based on the single objective can only candidate one optimal solution in each generation. Furthermore, simple theoretical correlations are utilized in determining the parameters of the PV module in a standard test condition (STC). The technical objective functions that have been presented in [
13,
14,
15,
16,
17,
18,
19] to find the optimal size of the SAPV system are: loss of power supply probability (LPSP), loss of load probability (LLP), loss of load (LL), and state of charge (SOC) as technical parameters. On the other hand, life cycle cost (LCC), net present cost (NPC), value of loss load (VOLL), and levelized cost of supplied and loss energy (LCoSLE) are used as economic parameters. Therefore, it is important to consider converge, convergence, and diversity of the optimal Pareto front (PF) solutions when dealing with multi-objective optimization. There are many multi-objective evolutionary algorithms that have been proposed by researchers to find a set of PF solutions such as NSGA-II [
20], PAES [
21], SPEA2 [
22], Pareto envelope-based selection algorithm (PESA-II) [
23], and others found in reference [
24]. However, it is evident that some of these methods cannot always conduct an efficient set of PF solutions, especially when the multi-objective optimization problems are complex [
25].
An optimum design of the SAPV system from the set of PF solutions should be properly chosen on the basis of techno-economic objectives. Therefore, the multi-criteria decision making (MCDM) techniques are considered a suitable choice in solving energy selection problems by enabling the decision-maker to order the set of optimal solutions based on conflicting criteria [
26]. However, suitable weight values should be appropriately given to the criteria according to their importance.
The rest of the paper is organized as follows. In
Section 2, a background on the utilized methods for sizing of the SAPV system is presented. The description and steps of modeling the standalone PV system with it is components is presented in
Section 3.
Section 4 presents the techno-economic criteria that are employed in order to evaluate the performance of the SAPV system. In
Section 5, the methodology presents five combined methods used to find an optimum configuration of the SAPV system using three types of the storage batteries.
Section 6 presents the results, discussions, and limitations. Finally, the conclusion and future work directions are discussed in
Section 7.
6. Results and Discussion
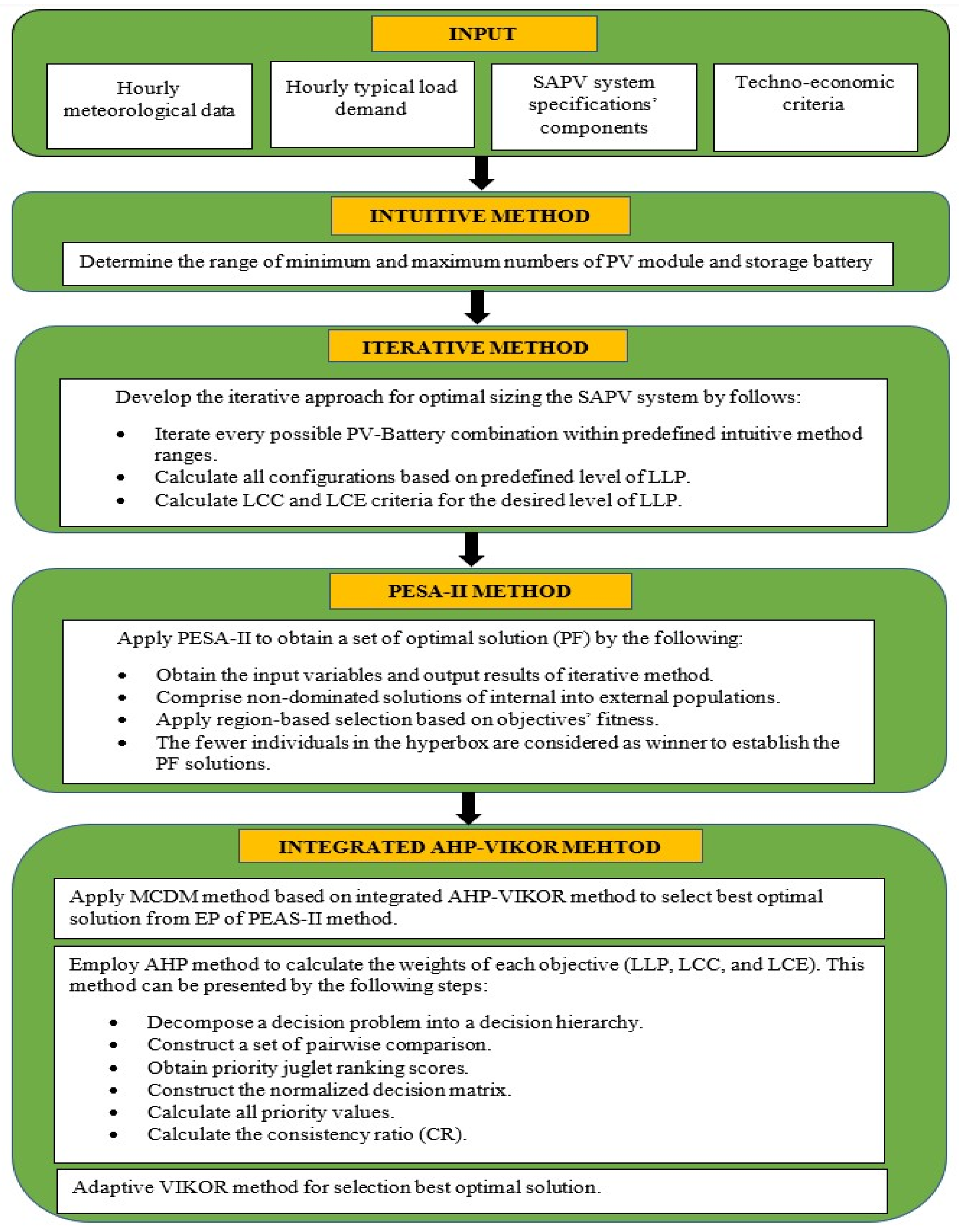
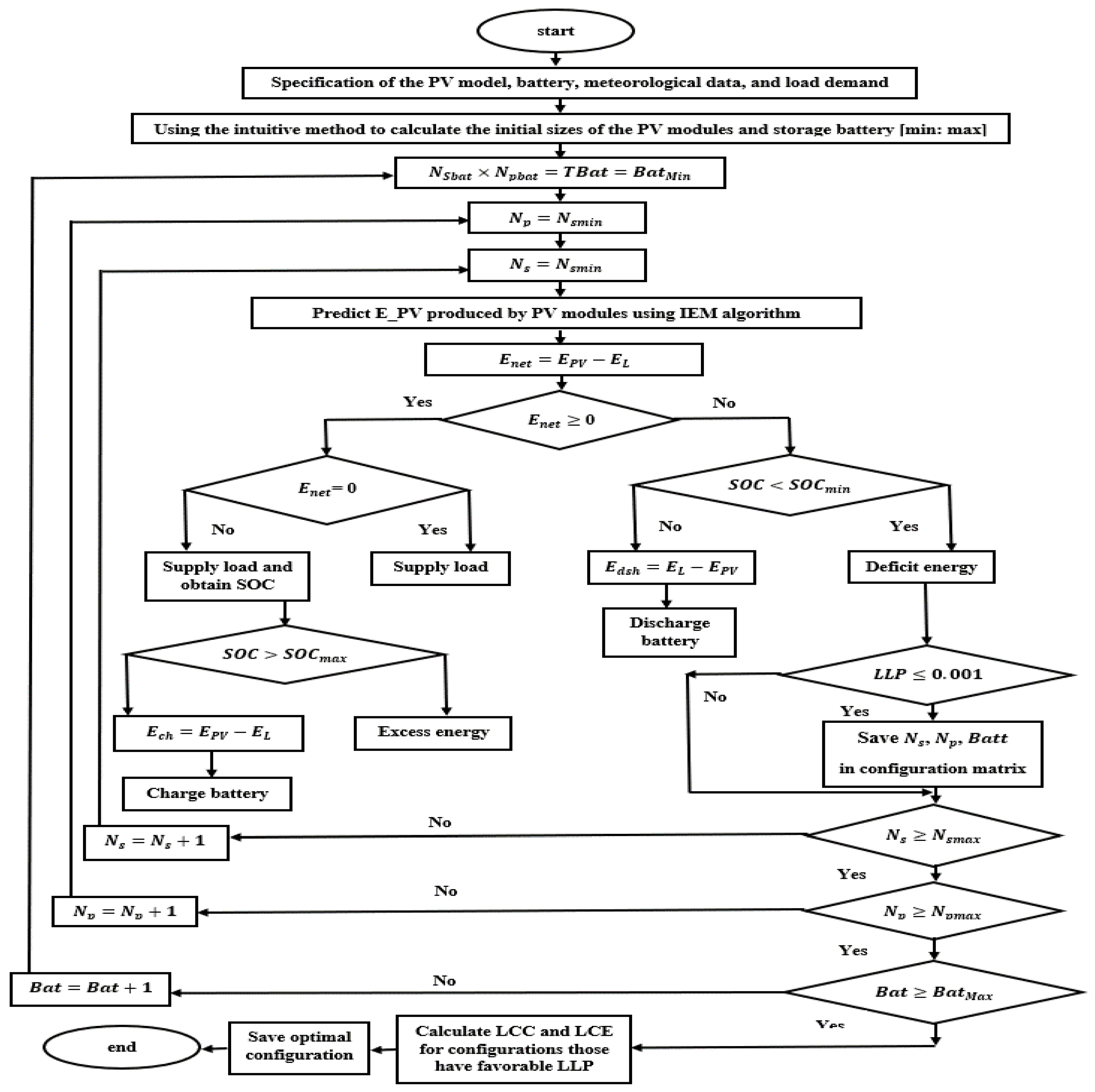
In this study, the proposed methodology was obtained in order to find a set of optimal configurations of the SAPV system to supply the load demand for a house in a remote area. Firstly, the intuitive method was employed to determine the search space of PV modules (series and parallel) and the three types of storage batteries (lead–acid, AGM, and lithium-ion). The ranges of the search space, which consisted of the number of PV modules and number of storage batteries used in the iterative method, were chosen by utilizing the intuitive method from 1 to 40 for series and parallel PV modules, whereas the range of the number of the storage battery was chosen from 3 to 50. The safety factor was set as 2 in the intuitive method. Afterward, the iterative method was used to construct sets of optimum configurations using a wide range of reliability and costs for the three types of storage batteries. The main advantage of the numerical approach is that the global optimal solutions can be reached by investigating all possible configurations in the design space. The numerical approach started by increasing
and
one by one in the first loop and the second loop, respectively. Meanwhile, the number of the storage battery increased in the third loop. Therefore, the numbers of configurations based on the numerical method were 59,503, 45,806, and 40,098 and the central processing unit (CPU) executions times were 10,295.71 s, 8151.07 s, and 8656.25 s for the lead–acid, AGM, and lithium-ion batteries, respectively.
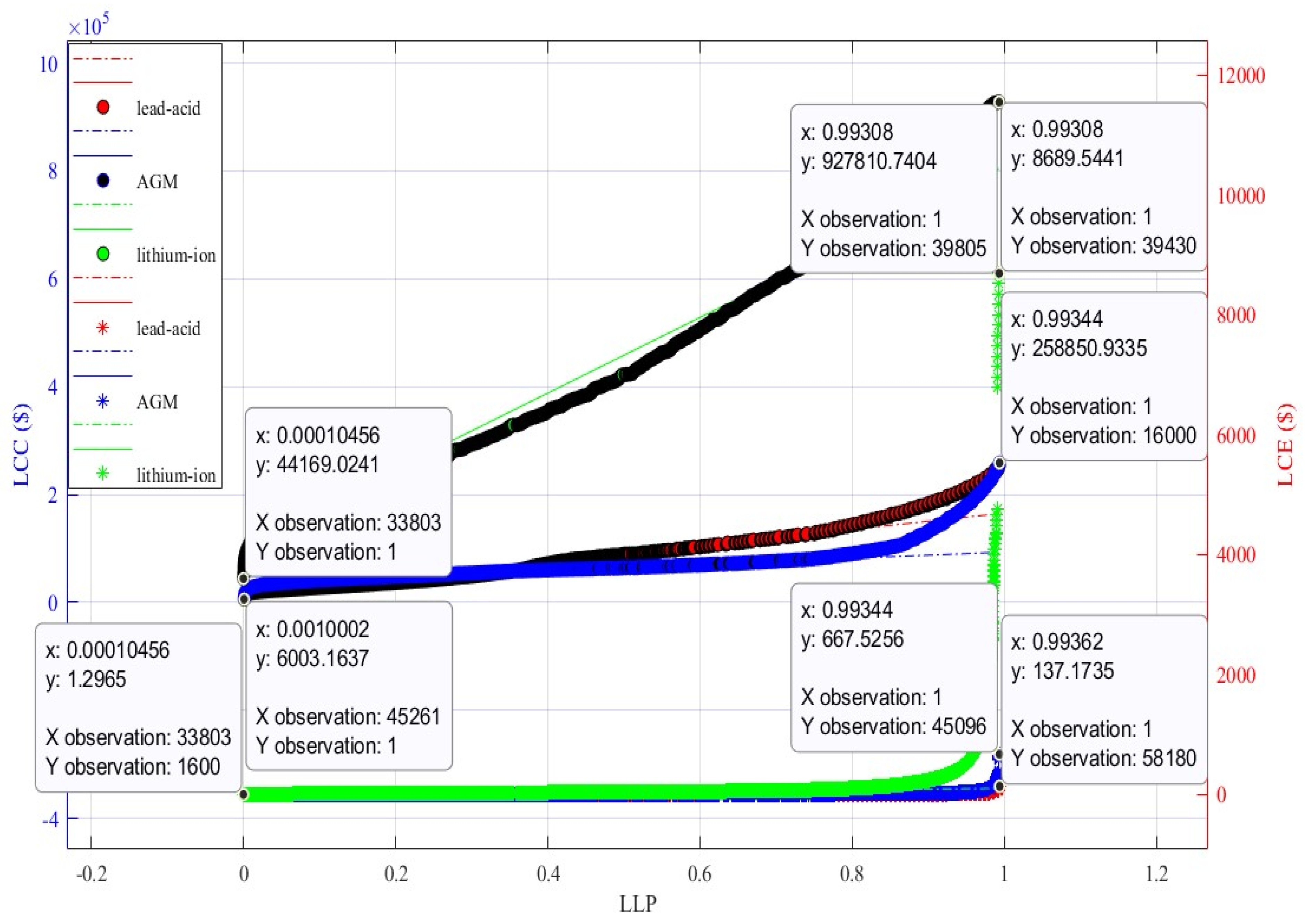
Figure 9 shows the correlation between the LLP, LCC, and LCE starting from the minimum value of each objective and ending at the maximum value by using the numerical approach for lead–acid, AGM, and lithium-ion storage batteries. According to [
13], the acceptable level of LLP is equal to 1%. Thus, the favorable level of LLP was set at
0.1%. For convenience, the maximum and minimum values of LLP, LCC, and LCE objectives with their numbers of PV modules and storage batteries are tabulated in
Table 6.
It is worth mentioning that selecting the optimal configuration from large numbers of configurations using the numerical method is a complex task. It is necessary to nominate a set of optimal solutions to be represented as optimal PF of multi-objectives by simultaneously minimizing the LLP, LCC, and LCE. On this basis, the PESA-II method was employed to perform this task. As mentioned in the literature, the difficulty of several multi-objective algorithms is in comparing two conflicting solutions and finding the fitness of the most probable solution. Moreover, the obtained PF must achieve three objectives, which are convergence, diversity, and coverage. In this research study, PSEA-II is used to obtain a set of optimal PF solutions based on three conflicting objectives, which are LLP, LCC, and LCE. The correlation between LLP, LCC, and LCE objectives using three types of batteries is illustrated in
Figure 10. The aim of obtaining sets of PF solutions is to minimize the three objectives, and the trade-off is shown in
Figure 10. From
Figure 11, the PESA-II method can efficiently obtain sets of PF solutions for lead–acid, AGM, and lithium-ion batteries in terms of good spread, convergence, and coverage. The CPU execution time of the three sets PF solutions for the lead–acid, AGM, and lithium-ion batteries were 19,810.81 s, 4783.03 s, and 1347.06 s, respectively. For more convenience, the minimum and maximum values of the three objectives for the three types of batteries using the PESA-II method are tabulated in
Table 7.
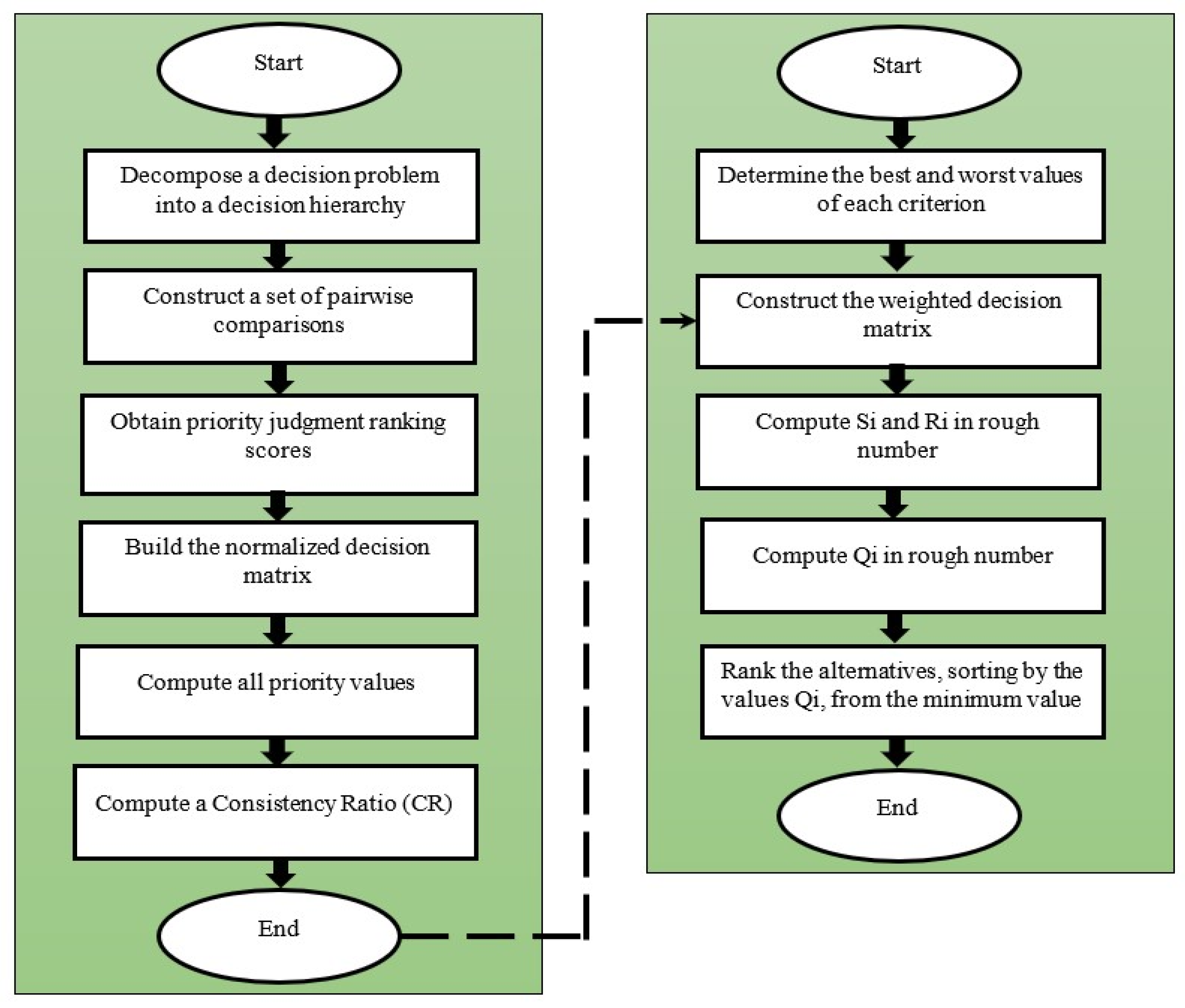
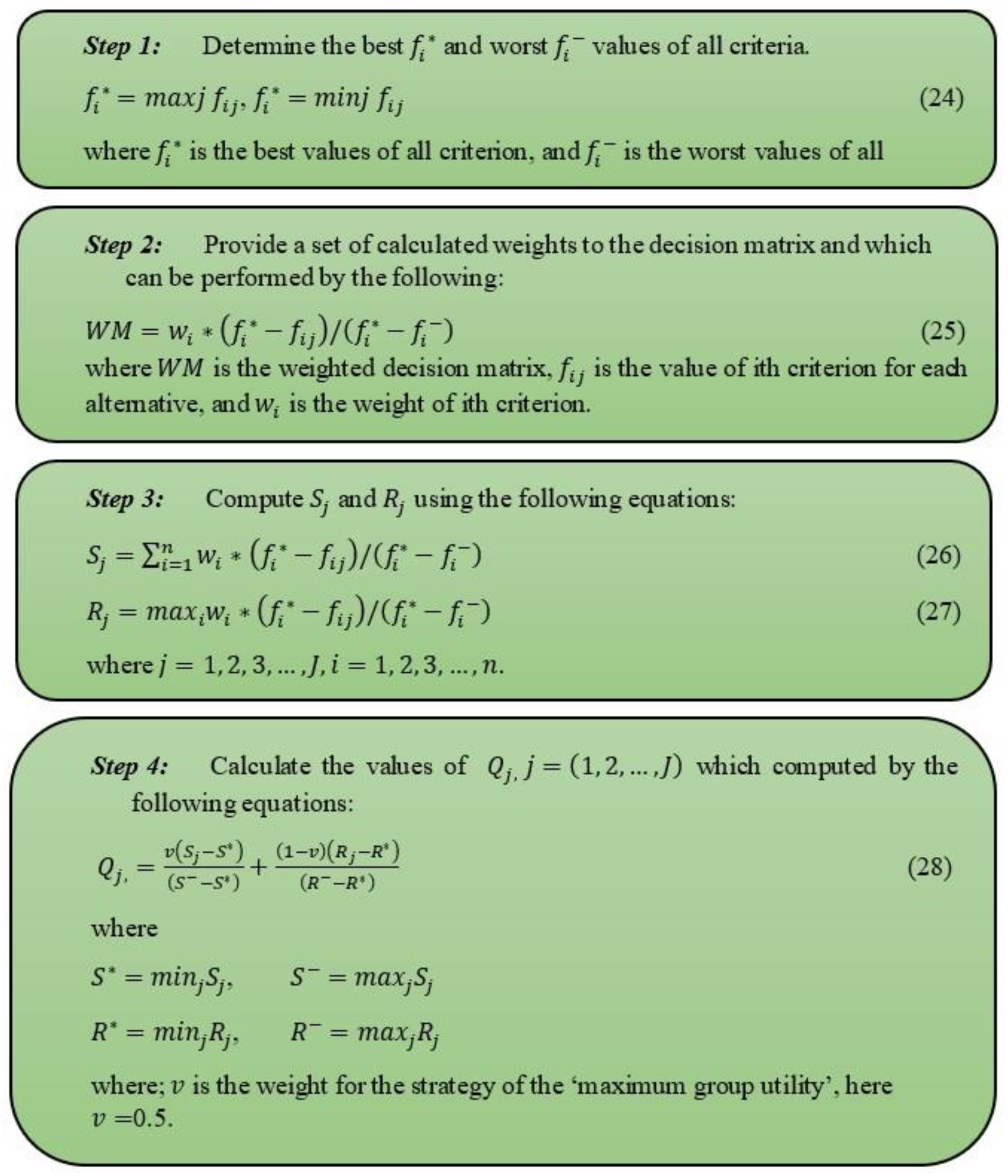
It is evident that the optimal PF solutions were efficiently constructed on the basis of the PESA-II method for three types of storage batteries. Therefore, the integrated AHP-VIKOR method was employed in order to arrange the preference of the optimal solutions. According to
Table 4 and
Table 5, the first evaluator gave extreme importance to LLP over LLC, and very strong importance to LCC over LCE. Meanwhile, equality was given between LCC and LCE. The second evaluator assumed equality between LLP and LCC, and very strong importance of LLP over LCE. Contrastingly, it gave extreme importance to LCC over LCE. The third evaluator proposed moderate and strong importance of LLP over LCC and LCE, respectively, whereas it gave moderate importance to LCC over LCE. Thus, values of weights for LLP, LCC, and LCE objectives were (0.79, 0.1, and 0.1) for the first evaluator, (0.48, 0.44, and 0.07) for the second evaluator, and (0.63, 0.26, and 0.1) for the third evaluator as illustrated in
Table 5. The consistency ratios (CR) for the three evaluators were 0.006, 0.01, and 0.033. The minimum CR value was recommended and meant the values of the given weights to the three conflicting objectives were stable and perfectly consistent. The results of the AHP-VIKOR method based on three evaluators for the lead–acid battery are given in
Table 8A–C. The optimal configurations were ranked by the Qi value in descending order and Friedman rank for the first 10 to 200 configurations. The first optimal configuration of the SAPV system based on the lead–acid battery for the first evaluator was composed of 250 numbers of PV modules (25 in series and 10 in parallel) and 40 numbers of storage batteries at an LLP equal to 0.00324, as well as the values of LCC and LCE being USD 54,032.19 and USD 1.5679, respectively. The Qi value decreased from 1 to 0.0022 at the first rank from 200 configurations on the basis of the Friedman rank. The CPU execution for the first evaluator was 0.656 s. Meanwhile, the first optimal configuration for the second evaluator based on the lead–acid battery consisted of 190 PV modules (10 in series and 19 in parallel) and 34 storage batteries at 0.03 LLP, and the values of LCC and LCE were
$43,276.91 and
$1.6524, respectively. The value of Qi at first rank was 0.0103 from 200 solutions using the Friedman rank. The CPU execution time was 0.4062 s. The results of optimal configurations of the third evaluator using the lead–acid battery were given by 216 PV modules (24 in series and 9 in parallel) and 38 storage batteries at LLP equal to 0.0109, and the values of LCC and LCE were
$48,330.29 and
$1.6232, respectively. The Qi value was 0.0059 at first rank of 200 configurations on the basis of the Friedman rank method. The CPU execution of the third evaluator for the lead–acid battery was 0.5156 s. The results of the AHP-VIKOR method based on the laid battery for three evaluators can be found in
Table 8A–C. It can be observed that the value of Qi was largely dependent on the given weight values by the evaluators for the three objectives. Moreover, the solution gained with min Si is a maximum group utility and the solution gained Ri is with a minimum individual of regret of the “opponent”. Thus, it had a proportional relationship with Si and Ri. The minimum value of Qi was registered in the first evaluator at 0.0022, then followed by third and second evaluators. This confirms that each configuration was ranked according to the weight values. The PESA-II method showed its ability to achieve a trade-off between LLP, LCC, and LCE objectives. This fact can be seen in the values of Qi within the first 10 configurations of rank, as shown in
Table 8A–C. In
Table 8B, the values of LLP were reduced from 0.03 at 1st rank to 0.003 at 10th rank, and the LCC values were increased from
$43,276.91 to
$52,713.91. The LCE values were changed on the basis of the energy conducted by the PV modules and the capacity of the storage batteries during the period of time.
In a similar manner to
Table 9 and
Table 10, the Qi values had minimum values with the first evaluator at a high level of accuracy according to the given weight value to LLP. The Qi values at 1
st rank for the first evaluator for the AGM and lithium-ion storage batteries were 0.0019 and 0.0038, respectively. Meanwhile, the Qi values at the first rank for the second and third evaluators based on AGM and lithium-ion batteries were 0.0094, 0.0086, 0.0181, and 0.0087, respectively. From
Table 10 (part A), it can be noted that there were four configurations with the rank of 4.5; this happened due to interdependence in total numbers of PV modules and storage batteries. The configurations in
Table 10, some configurations of
Table 9, and some configurations in
Table 8 (part B) had undesirable levels of LLP. This was because the second evaluator gave moderate importance between LLP and LCC objectives, as observed from Qi values that were larger than others. Therefore, a higher priority must be given to the LLP objective in designing of SAPV system. The CPU_execution times for the three evaluators based on AGM and lithium-ion storage batteries were 0.5468, 0.4531, 0.6093, 0.5781, 0.3437, and 0.4218 s. It was clear that the computational times of the three evaluators based on the lithium-ion battery were less than AGM and lead–acid. This was because of the large capacity of the lithium-ion battery, which is about 6.6 kWh compared with other batteries. However, the lithium-ion battery is very expensive compared with AGM and lead–acid batteries at the same level of reliability, as illustrated in
Table 8,
Table 9 and
Table 10 (part A). Moreover, the levelized cost of energy values presented by the lead–acid battery were less than other batteries, which makes the lead–acid battery more suitable in the designing of a SAPV system. However, more replacement times in the lead–acid battery are required. In this regard, it is prudent to choose the lead–acid battery for the three evaluators at first rank to analyze the performance of the SAPV system for one year.
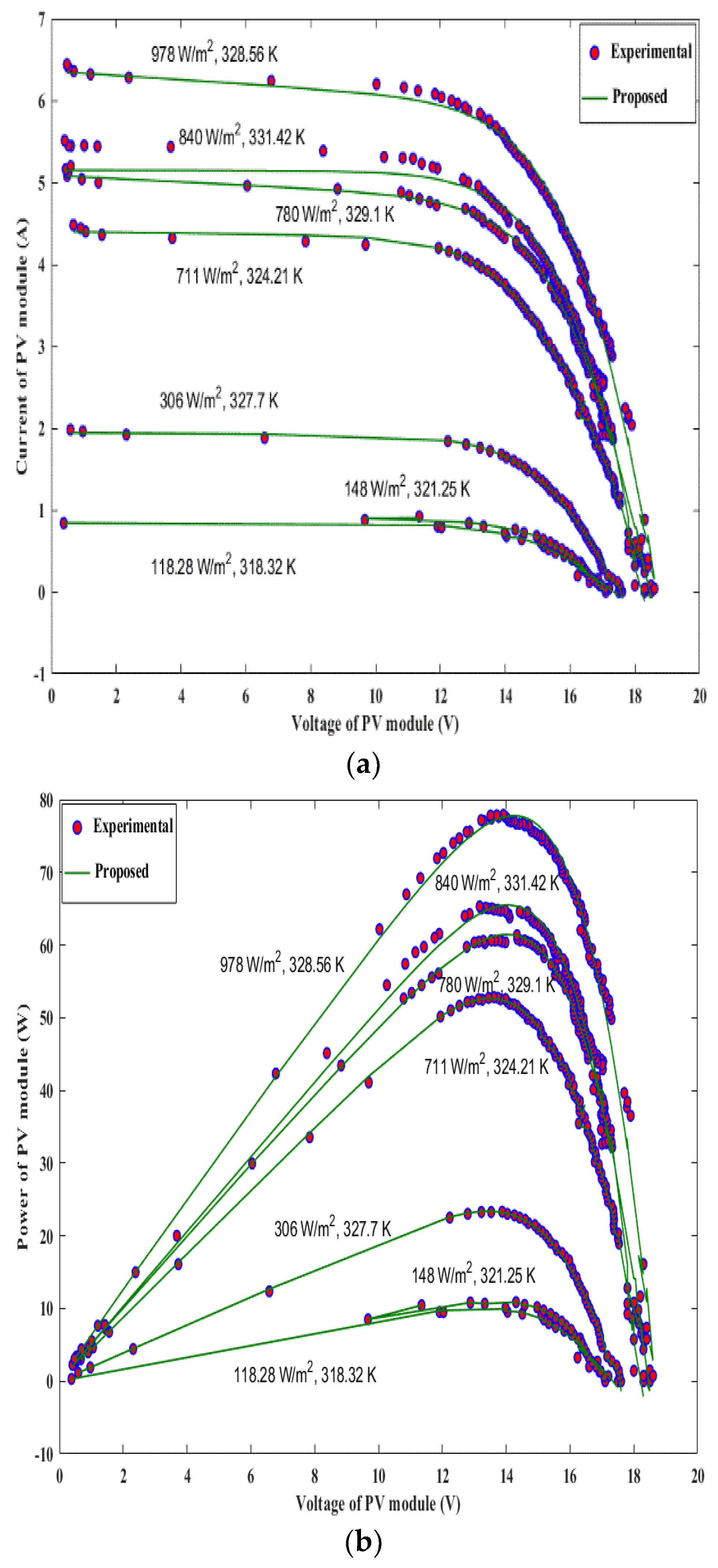
The daily performance of the SAPV system under the optimal configuration, which was composed of 250 PV modules (25 in series and 10 in parallel) and 40 lead-acid storage batteries, is illustrated in
Figure 12. The first subplot shows solar irradiation (G) using hourly meteorological data for one year. Meanwhile, the output power of PV modules (P_PV) and load demand (E_L) are illustrated in the second subplot; the average G and P_PV over one year were around 4363.8 Wh/m
2/day and 2938.4 KWh, respectively. The state of charge (SOC), deficit energy (E_deficit), and dumped energy (E_dump) are shown in the third, fourth, and fifth subplots, respectively. According to
Figure 12, the SAPV system was usually able to fulfill the required load demand through the year, except for 12 days, as demonstrated in
Table 11. The deficit energy for one year was about 72 kWh/year, which is equal to 28 h under the chosen optimal configuration at 0.0032 LLP. In the third subplot, the SOC was almost at high levels, except for the days listed in
Table 11. The reason for this is that level of solar irradiance is low, especially in December, as shown in the fourth subplot. The last subplot indicated excess energy for one year. From
Table 11, the lowest average daily solar irradiance was registered on 24 December at about 1591.7 Wh/m
2/day. Therefore, the output power of PV modules, SOC, and deficit energy were 36 KWh, 471.8 KWh, and 4.5 KWh, respectively. In fact, the shortages almost happened in the early morning before the appearance of sunshine due to the low solar irradiance before one day, and the amount of energy stored in batteries was very little. On the other hand, the maximum solar irradiance occurred on 1 March and was about 6638.8 Wh/m
2/day. Thus, the output power of PV modules, SOC, and excess energy were 140 KWh, 975 KWh, and 79.6 KWh, respectively.
Figure 13 shows the monthly state of charge, the output power of PV modules, load demand, excess energy, deficit energy, and ambient temperature for one year. As stated previously, the maximum solar irradiance occurred in March, whereas the minimum solar irradiance was registered in December, as illustrated in
Figure 13.
Last but not least, several observations were noted, as follows:
Employing the intuitive method can significantly reduce the computational time of the iterative approach, which was found to be very accurate compared with other methods.
The PESA-II method demonstrated its capability not only in obtaining PF solutions considering three conflicting objectives, but also by reducing the big solutions in the design space using binary tournament selection.
An effective and integrated AHP-VIKOR method allowed for the reaching of the final optimum configuration and selected the most appropriate storage battery for the SAPV system.
The performance of the proposed SAPV system was analyzed on the basis of hourly metrological data for one year.
Overall, our proposed novel iterative-hybrid method tended to be very accurate compared with metaheuristic multi-objective optimization methods due to its random nature, which led to the omission of several important solutions.
It is worth mentioning that there were some limitations that should be considered in future work, such as selecting optimal configurations on the basis of PESA-II to establish set PF solutions, which can be improved by using another method that has a better capacity to deal with large data conducted by a numerical method. Moreover, the given weights’ values by using AHP method can be improved because the AHP method requires manual calculations.

 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}