Generalization of the FOPDT Model for Identification and Control Purposes



Abstract
:1. Introduction
2. The Generalization of the FOPDT Model
3. Analysis
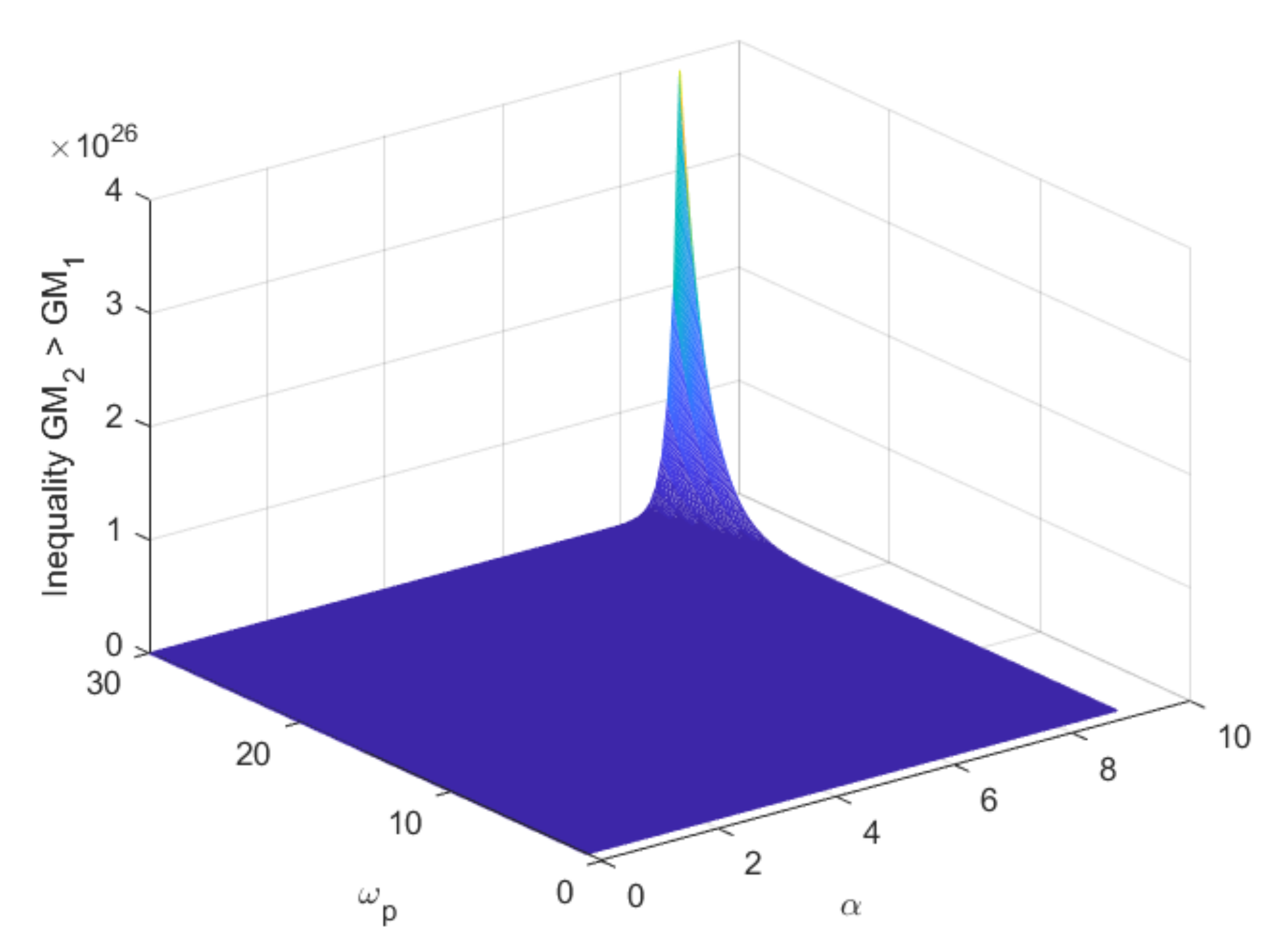
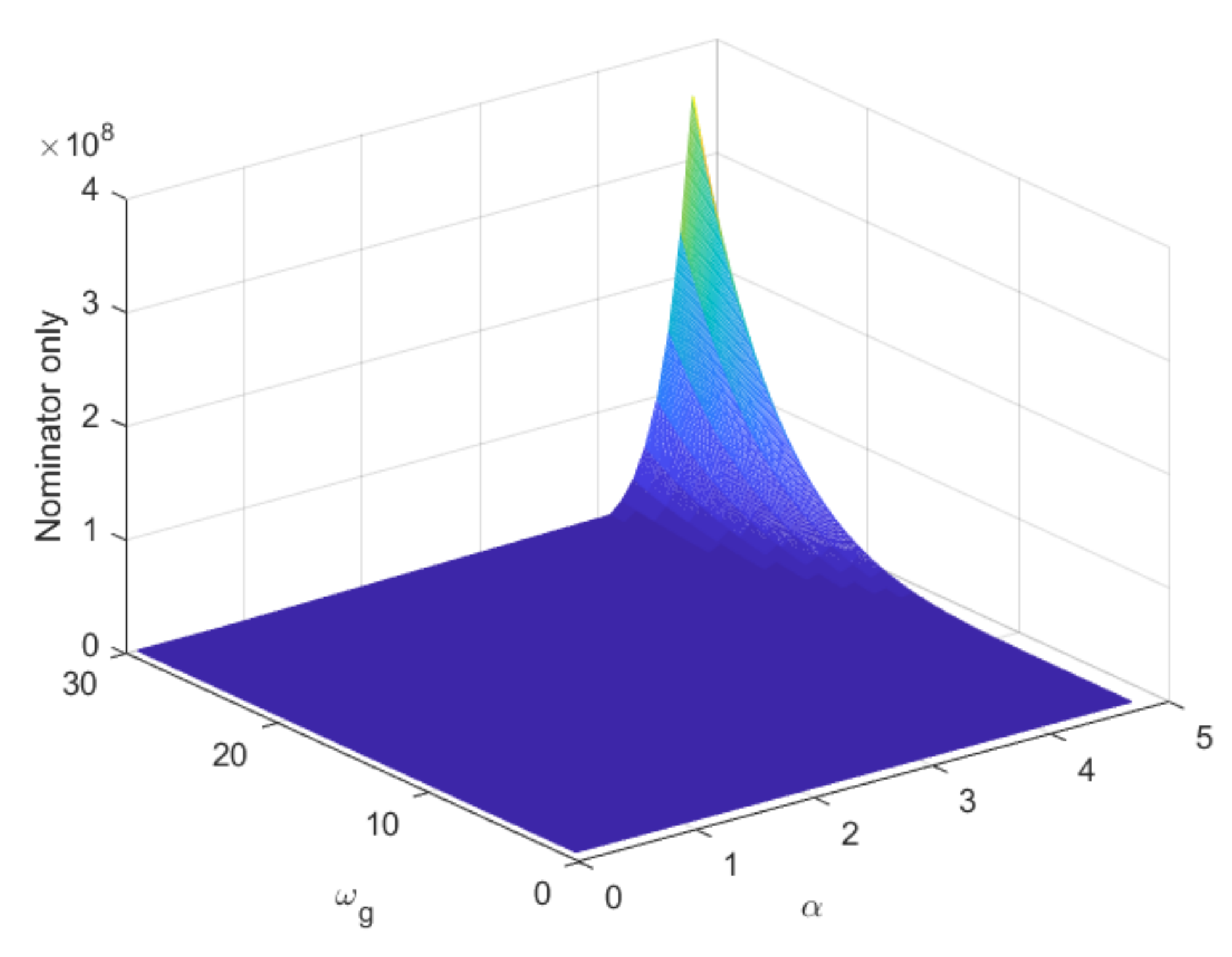
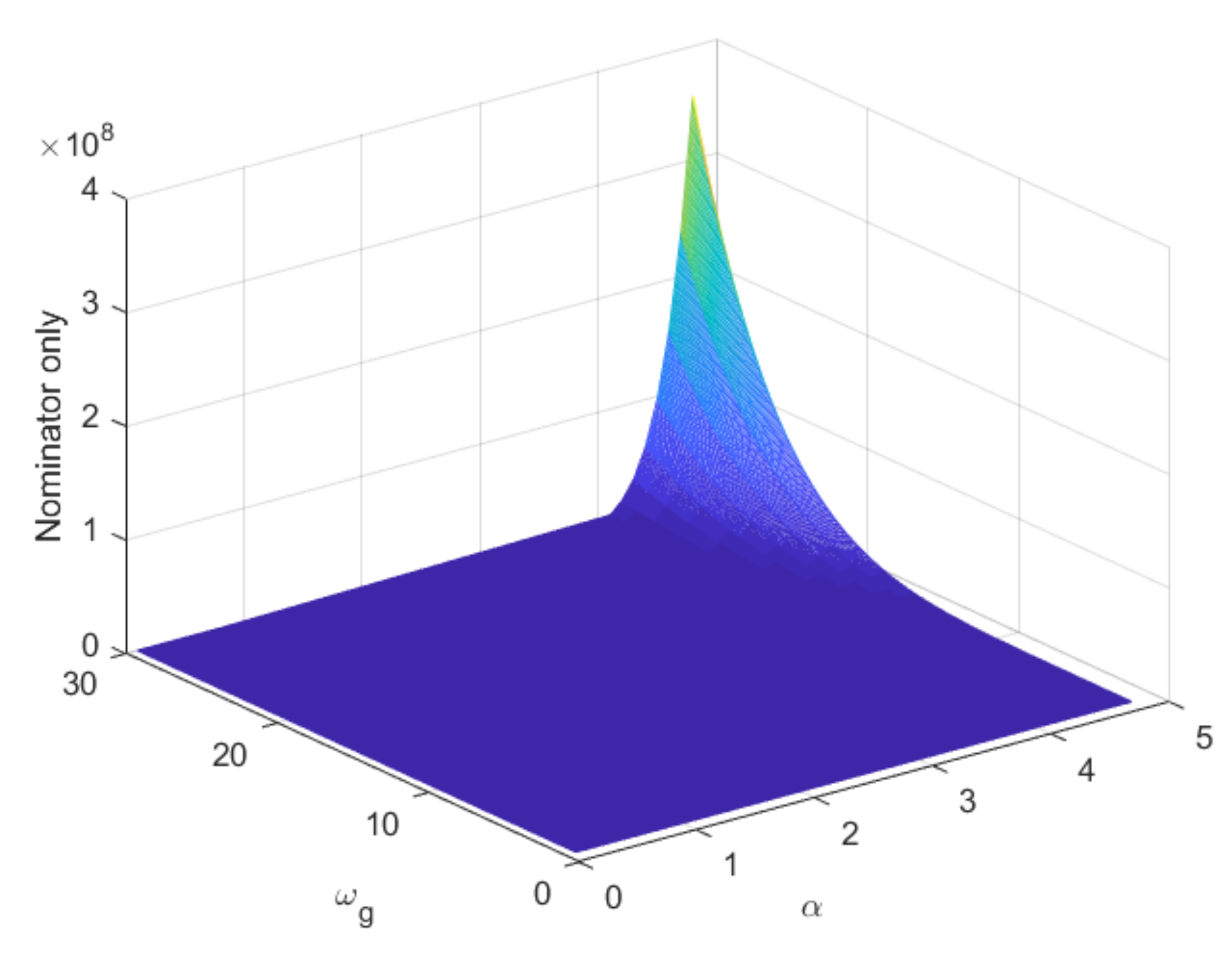
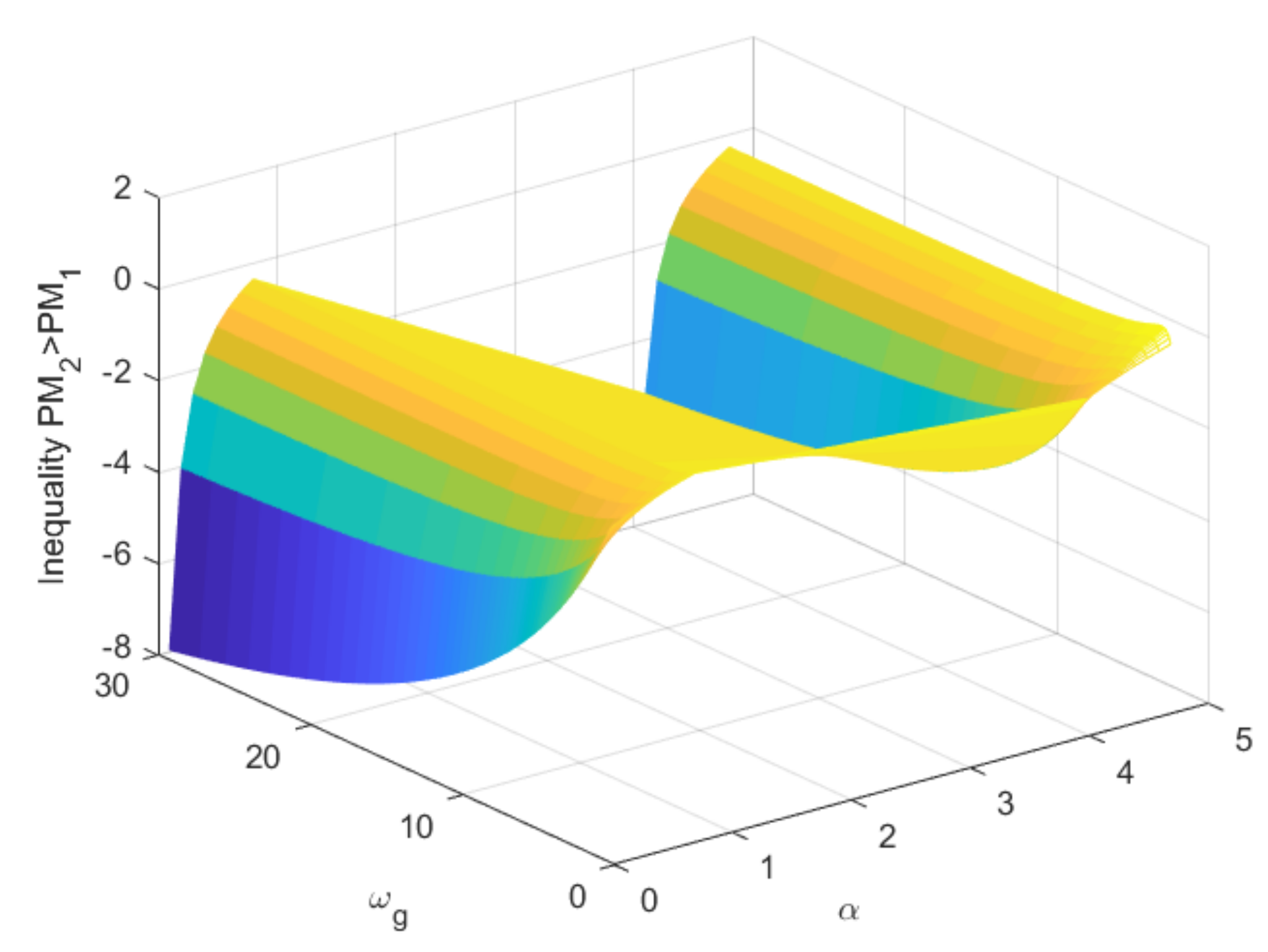
3.1. Effect of Augmentation with Fractional Order Time Constant Term
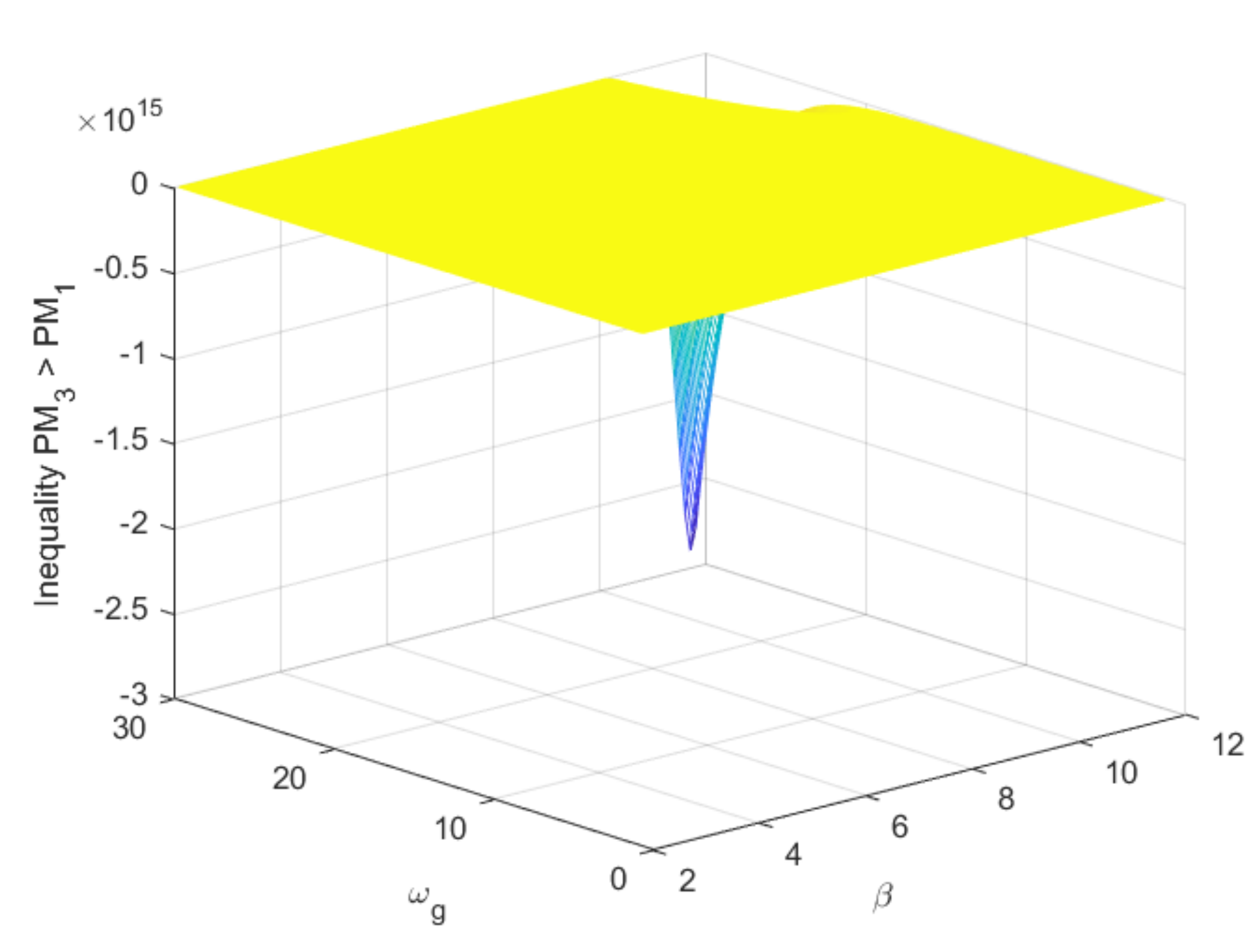
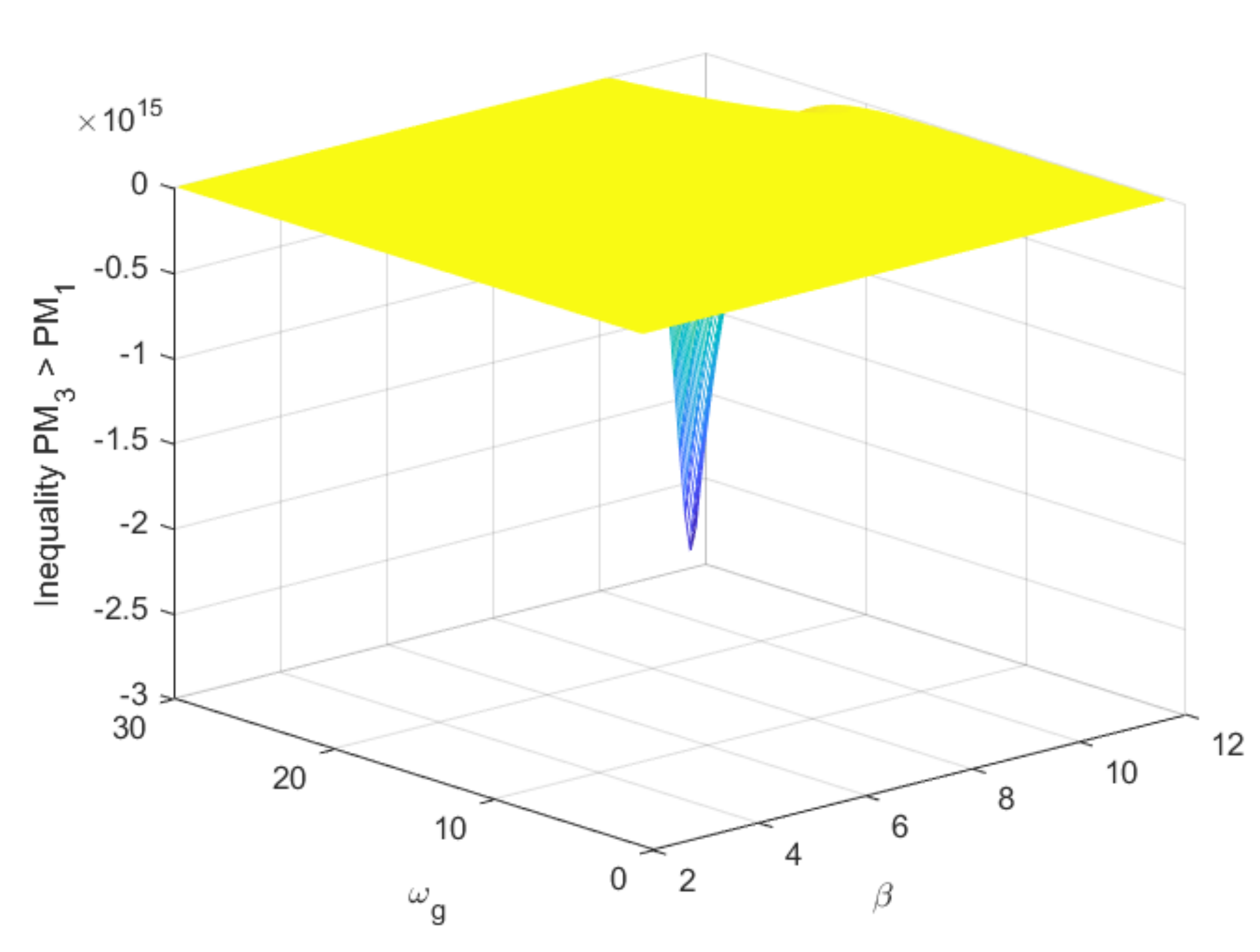
3.2. Effect of Augmentation with Fractional Order Time Delay Term
4. Discussion
4.1. On Identification
4.1.1. Identification Procedure
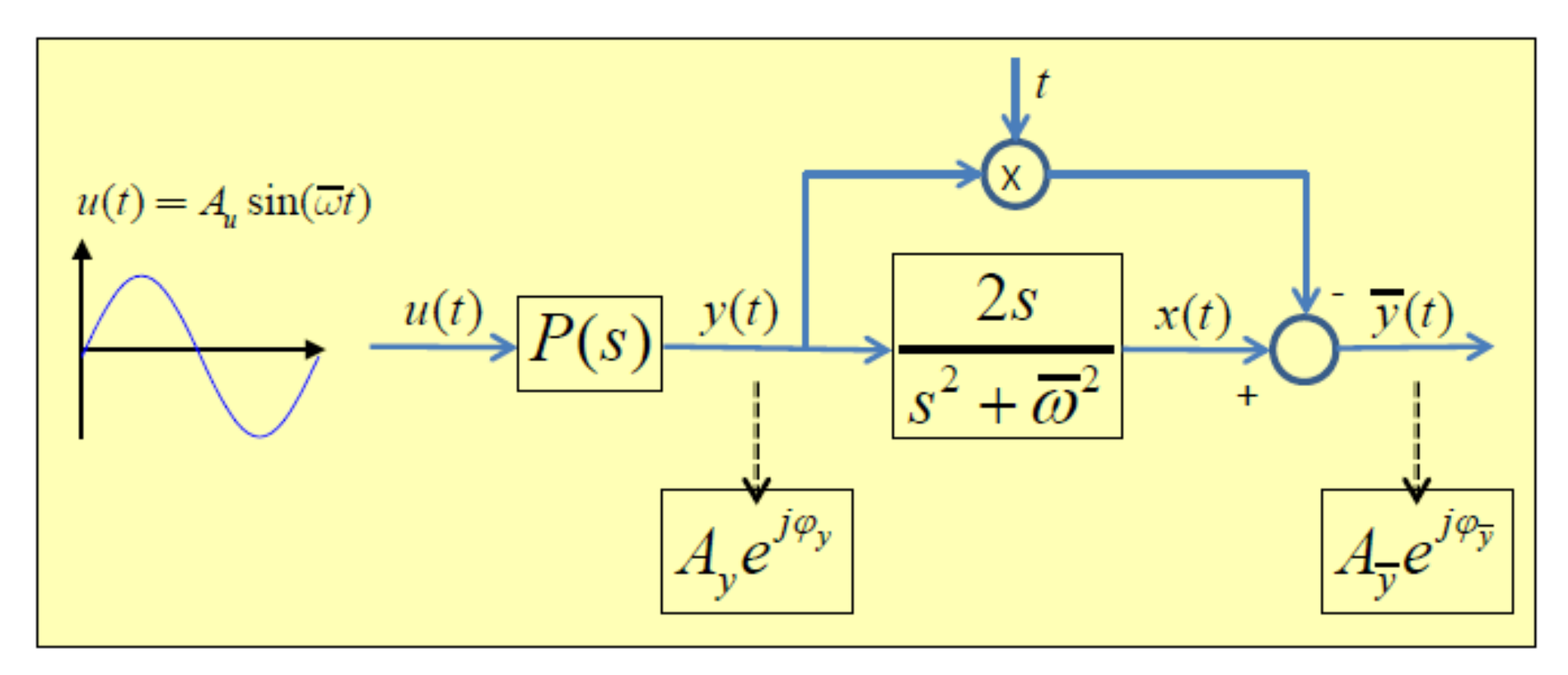
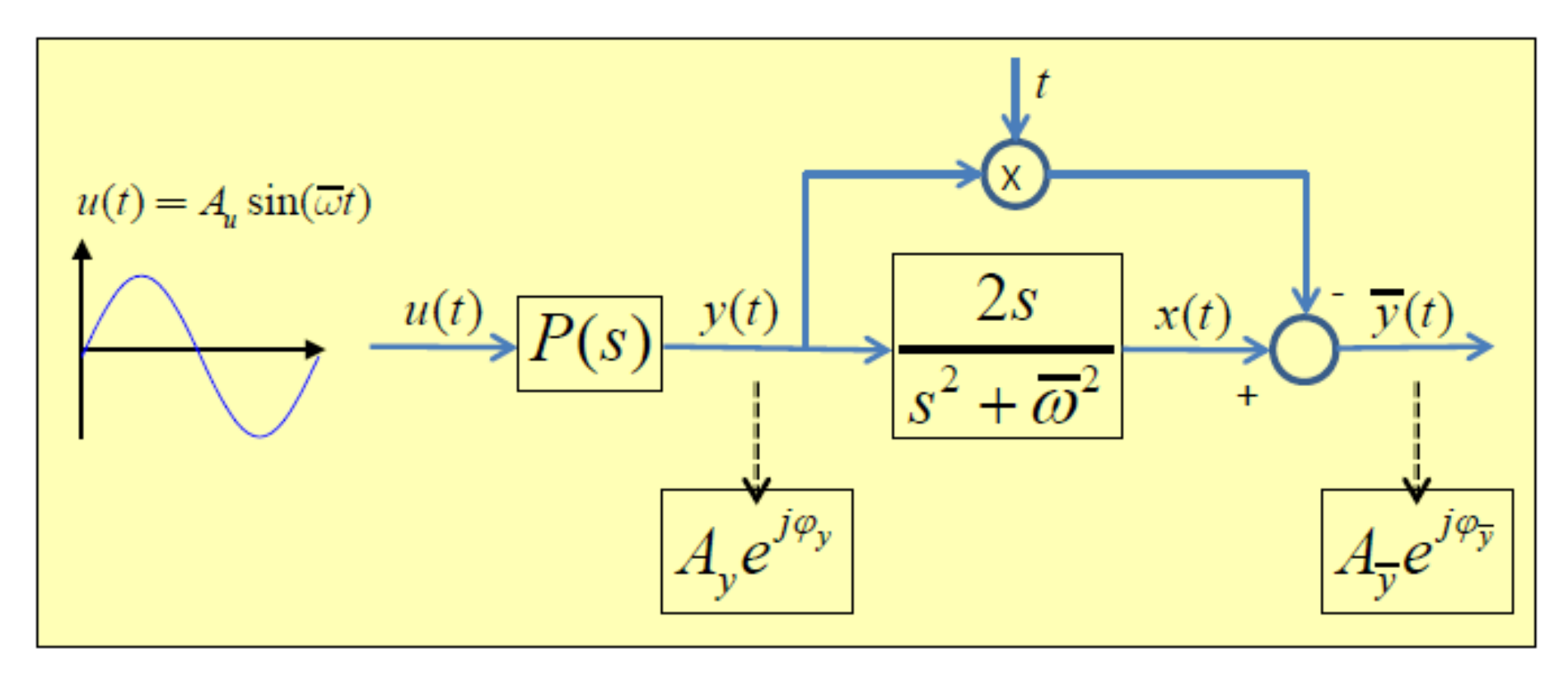
- Do a sine test with using the scheme in Figure 6. The process frequency response and its slope can be obtained from the magnitude and phase of the signals and . In Figure 6, represents the real physical process and represents the measured process output. The underlying theory has been described in [28] and the method validated as robust against process disturbances and measurement noise.
- Obtain a simple FOPDT model of the physical process with the method described in [16].
- Convert the FOPDT model into a discrete-time transfer function for digital control purposes. A procedure to convert any fractional order model into a discrete-time transfer function has been described in [29].
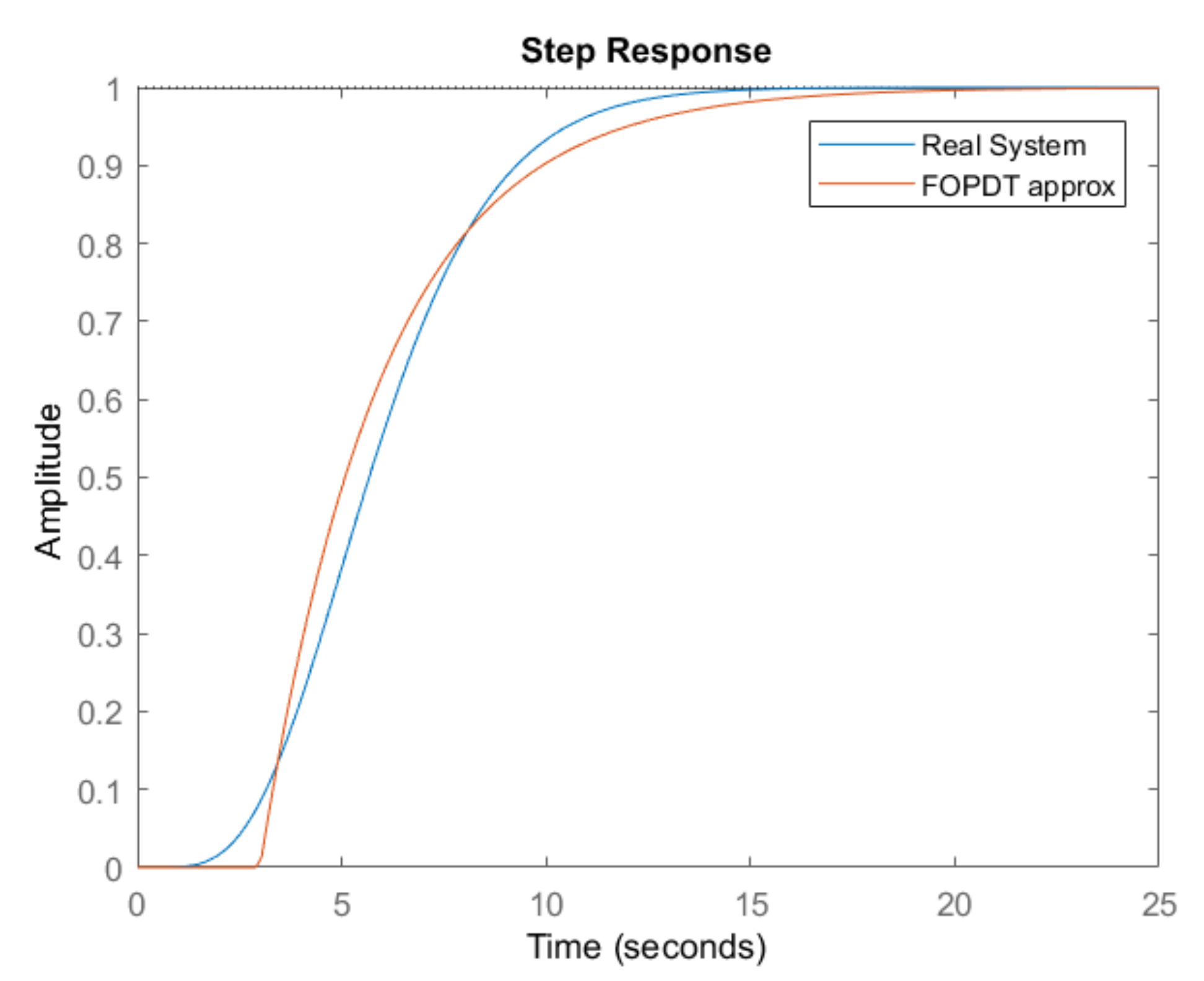
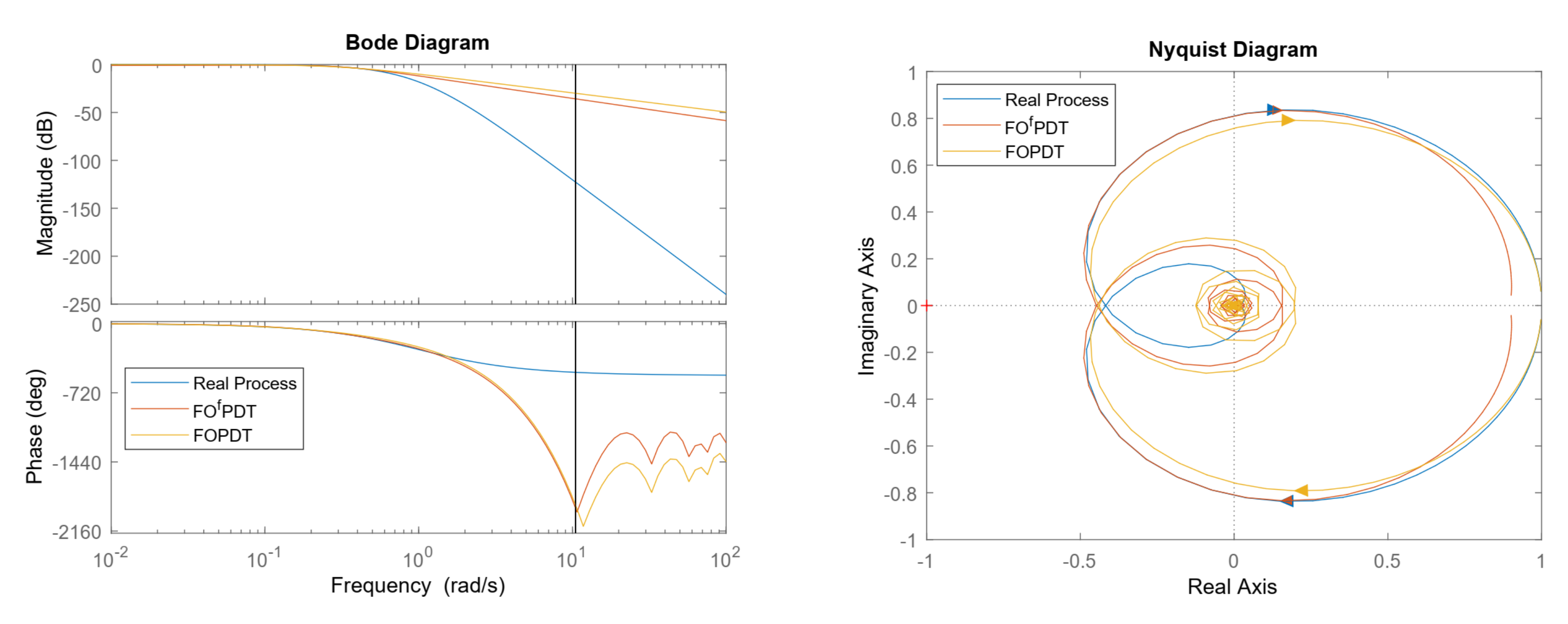
4.1.2. High Order Process Example
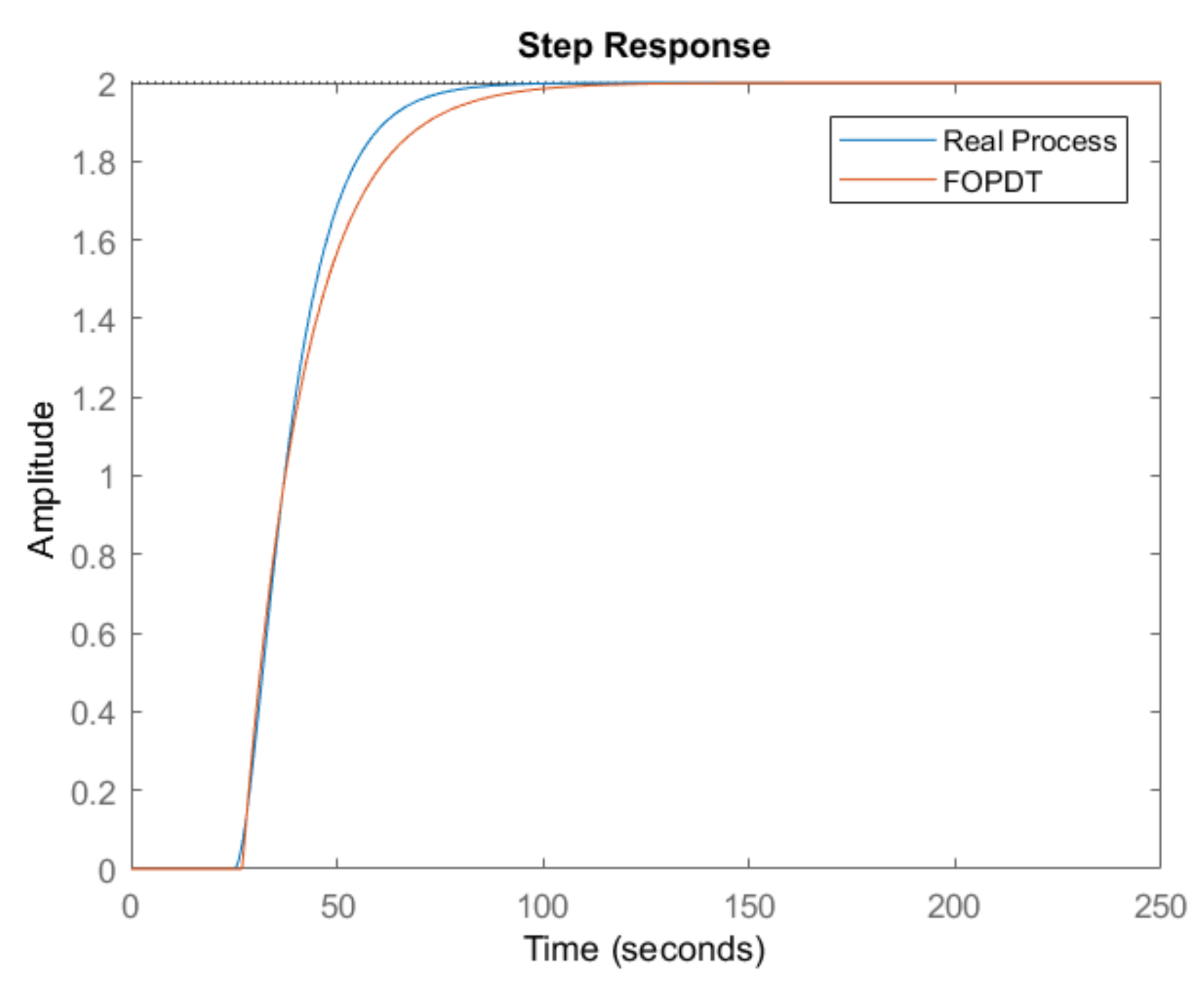
4.1.3. Delay Dominant Example
- if then the system is lag dominant;
- if then the system is balanced; and
- if then the system is delay dominant.
4.2. On Control Design
4.3. On Deployment
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| FOPDT | First Order Plus Dead Time |
| FOPDT | First Order Fractional Plus Dead Time |
| FOPDT | First Order Plus Dead Time Fractional |
| FOPDT | First Order Fractional Plus Dead Time Fractional |
| SOPDT | Second Order Plus Dead Time |
| PID | Proportional Integral Derivative (Control) |
| GM | Gain Margin |
| PM | Phase Margin |
Appendix A. Generic FOfPDT Model Identification
References
- Alfaro, V.M. PID controllers’ fragility. ISA Trans. 2007, 46, 555–559. [Google Scholar] [CrossRef] [PubMed]
- Samad, T. A survey on industry impact and challenges thereof. IEEE Control Syst. Mag. 2017, 37, 17–18. [Google Scholar]
- Ionescu, C.; Copot, D. Hands-on MPC tuning for industrial applications. Bull. Pol. Acad. Sci. Tech. Sci. 2019, 67, 925–945. [Google Scholar] [CrossRef]
- Monje, C.; Chen, Y.; Vinagre, B.; Xue, D.; Feliu, V. Fractional Order Systems and Controls; Springer: London, UK, 2010. [Google Scholar]
- Padula, F.; Visioli, A. Advances in Robust Fractional Control; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Petras, I. Fractional Order Nonlinear Systems; Springer: Berlin, Germany, 2011. [Google Scholar]
- De Keyser, R.; Muresan, C.; Ionescu, C. Universal direct tuner for loop control in industry. IEEE Access 2019, 7, 81308–81320. [Google Scholar] [CrossRef]
- Copot, C.; Muresan, C.; Ionescu, C. Image-Based and Fractional-Order Control for Mechatronic Systems. Series: Advances in Industrial Control; Springer: Berlin, Germany, 2020. [Google Scholar]
- Dastjerdi, A.; Vinagre, B.; Chen, Y.Q.; HosseinNia, S. Linear fractional order controllers; a survey in the frequency domain. Annu. Rev. Control 2019, 47, 51–70. [Google Scholar] [CrossRef]
- Kristiansson, B.; Lennartson, B. Robust and optimal tuning of PI and PID controllers. IEE Proc. Control Theory Appl. 2002, 149, 17–25. [Google Scholar] [CrossRef]
- Åström, K.; Hägglund, T. Advanced PID Control; Instrumentation, Systems and Automation Society (ISA): Atlanta, GA, USA, 2006. [Google Scholar]
- Padula, F.; Visioli, A. On the fragility of fractional-order PID controllers for FOPDT processes. ISA Trans. 2016, 60, 228–243. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Chen, Y.; Podlubny, I. Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y. Fractional order [proportional derivative] controller for a class of fractional order systems. Automatica 2009, 45, 2446–2450. [Google Scholar] [CrossRef]
- Birs, I.; Muresan, C.I.; Nascu, I.; Ionescu, C.M. A survey of recent advances in fractional order control for time delay systems. IEEE Access 2019, 7, 30951–30965. [Google Scholar] [CrossRef]
- De Keyser, R.; Ionescu, C. Minimal information based, simple identification method of fractional order systems for model based control applications. In Proceedings of the Asian Conference on Control, Gold Coast, Australia, 17–20 December 2017; pp. 1411–1416. [Google Scholar]
- Juchem, J.; Dekemele, K.; Chevalier, A.; Loccufier, M.; Ionescu, C. First order plus frequency dependent delay modelling: New perspective or mathematical curiosity? In Proceedings of the Conference on System Man and Cybernetics, Bari, Italy, 6–9 October 2019; pp. 2025–2030. [Google Scholar]
- Oustaloup, A. Diversity and Non-Integer Differentiation for System Dynamics (Control Systems and Industrial Engineering); Wiley: London, UK, 2014. [Google Scholar]
- Baleanu, D.; Tenreiro Machado, J. (Eds.) Fractional Dynamics and Control; Springer: New York, NY, USA, 2012. [Google Scholar]
- Nise, N. Control System Engineering, 6th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Copot, D.; Ghita, M.; Ionescu, C. Simple alternatives to PID–type control for processes with variable time delay. Processes 2019, 7, 146. [Google Scholar] [CrossRef] [Green Version]
- Copot, D.; Ionescu, C. A fractional order controller for delay dominant systems: Application to a continuous casting line. J. Appl. Nonlinear Dyn. 2019, 8, 67–78. [Google Scholar] [CrossRef]
- Birs, I.; Copot, D.; Pilato, C.; Ghita, M.; Caponetto, R.; Muresan, C.; Ionescu, C. Experiment design and estimation methodology of varying properties for non-Newtonian fluids. In Proceedings of the Conference on System Man and Cybernetics, Bari, Italy, 6–9 October 2019; pp. 324–329. [Google Scholar]
- Birs, I.; Copot, D.; Ghita, M.; Muresan, C.; Ionescu, C. Fractional-order modelling of impedance measurements in a blood resembling experimental setup. In Proceedings of the Conference on System Man and Cybernetics, Bari, Italy, 6–9 October 2019; pp. 898–903. [Google Scholar]
- Birs, I.; Muresan, C.; Copot, D.; Nascu, I.; Ionescu, C. Identification for control of suspended objects in non-Newtonian fluids. Fract. Calc. Appl. Anal. 2019, 22, 1378–1394. [Google Scholar] [CrossRef]
- De Keyser, R.; Muresan, C. Robust estimation of a SOPDT model from highly corrupted step response data. In Proceedings of the European Control Conference, Naples, Italy, 25–28 June 2019; pp. 818–823. [Google Scholar]
- Berner, J.; Soltesz, K.; Hägglund, T.; Åström, K. Autotuner Identification of TITO Systems Using a Single Relay Feedback Experiment; IFAC Papers On-Line; IFAC, Ed.; IFAC World Congress: Prague, Czech Republic, 2017; pp. 5332–5337. [Google Scholar] [CrossRef]
- De Keyser, R.; Muresan, C.; Ionescu, C. A novel auto–tuning method for fractional order PI/PD controllers. ISA Trans. 2016, 92, 268–275. [Google Scholar] [CrossRef] [PubMed]
- De Keyser, R.; Muresan, C.; Ionescu, C. An efficient algorithm for low-order direct discrete-time implementation of fractional order transfer functions. ISA Trans. 2018, 74, 229–238. [Google Scholar] [CrossRef] [PubMed]
- Ionescu, C.; Lopes, A.; Copot, D.; Tenreiro Machado, J.; Bates, J. The role of fractional calculus in modeling biological phenomena: A review. Commun. Nonlinear Sci. Numer. Simul. 2017, 51, 141–159. [Google Scholar] [CrossRef]
- Sun, H.; Zhang, Y.; Baleanu, D.; Chen, W. A new collection of real world applications of fractional calculus in science and engineering. Commun. Nonlinear Sci. Numer. Simul. 2018, 64, 213–231. [Google Scholar] [CrossRef]
- Ionescu, C.; De Keyser, R. The next generation of relay-based PID autotuners (part 1): Some insights on the performance of simple relay-based PID autotuners. In Proceedings of the IFAC Advances in PID Control, Brescia, Italy, 28–30 March 2012; pp. 122–127. [Google Scholar] [CrossRef] [Green Version]
- De Keyser, R.; Joita, O.; Ionescu, C. The next generation of relay-based PID autotuners (part 2): A simple relay-based PID autotuner with specified modulus margin. In Proceedings of the IFAC Advances in PID Control, Brescia, Italy, 28–30 March 2012; pp. 128–133. [Google Scholar] [CrossRef] [Green Version]
- De Keyser, R.; Dutta, A.; Hernandez, A.; Ionescu, C. A specifications based PID autotuner. In Proceedings of the Conference on Control Applications, Dubrovnik, Croatia, 3–5 October 2012; pp. 1621–1626. [Google Scholar] [CrossRef]
- Starr, K. Single Loop Control Methods; ABB Process Automation Service: Baden, Switzerland, 2016. [Google Scholar]
- Sánchez, J.; Guinanldo, M.; Visioli, A.; Dormido, S. Identification of process transfer function parameters in event-based PI control loops. ISA Trans. 2018, 75, 157–171. [Google Scholar] [CrossRef] [PubMed]
- Sánchez, J.; Guinanldo, M.; Visioli, A.; Dormido, S. Enhanced event-based identification procedure for process control. Ind. Eng. Chem. Res. 2018, 57, 7218–7231. [Google Scholar] [CrossRef]
- Merigo, L.; Beschi, M.; Padula, F.; Visioli, A. A noise filtering event generator for PIDPlus controllers. J. Frankl. Inst. 2018, 355, 774–802. [Google Scholar] [CrossRef]
- Tejado, I.; Vinagre, B.; Traver, J.; Prieto–Arranz, J.; Nuevo–Gallardo, C. Back to basics: Meaning of the parameters of fractional order PID controllers. Mathematics 2019, 7, 530. [Google Scholar] [CrossRef] [Green Version]
- Cajo Diaz, R.; Mac Thi, T.; Plaza Guingla, D.; Copot, C.; De Keyser, R.; Ionescu, C. A survey on fractional order control techniques for unmanned aerial and ground vehicles. IEEE Access 2019, 7, 66864–66878. [Google Scholar] [CrossRef]
- Dastjerdi, A.; Saikumar, N.; HosseinNia, S. Tuning guidelines for fractional order PID controllers: Rules of thumb. Mechatronics 2018, 56, 26–36. [Google Scholar] [CrossRef]
- Chevalier, A.; Francis, C.; Copot, C.; Ionescu, C.; De Keyser, R. Fractional order PID design: Towards transition from state-of-art to state-of-use. ISA Trans. 2019, 84, 178–186. [Google Scholar] [CrossRef] [PubMed]
- Biswas, K.; Bohannan, G.; Caponetto, R.; Lopes, A.M.; Tenreiro Machado, J. Fractional-Order Devices; Springer Nature: Cham, Switzerland, 2017. [Google Scholar]
- Barbosa, R.; Tenreiro Machado, J.; Ferreira, I. Tuning of PID controllers based on Bode’s ideal transfer function. Nonlinear Dyn. 2004, 38, 305–321. [Google Scholar] [CrossRef]
- Jesus, I.; Tenreiro Machado, J. Fractional control of heat diffusion systems. Nonlinear Dyn. 2008, 54, 263–282. [Google Scholar] [CrossRef] [Green Version]
- HosseinNia, S.; Tejado, I.; Vinagre, B. Fractional-order reset control: Application to a servomotor. Mechatronics 2013, 23, 781–788. [Google Scholar] [CrossRef]
- Muresan, C.; Folea, S.; Birs, I.; Ionescu, C. A novel fractional order model and controller for vibration supression in flexible smart beam. Nonlinear Dyn. 2018, 93, 525–541. [Google Scholar] [CrossRef]
- Zhao, S.; Cajo Diaz, R.; De Keyser, R.; Ionescu, C. The potential of fractional order distributed MPC applied to steam/water loop in large scale ships. Processes 2020, 8, 451. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Liu, L.; Dehghan, S.; Chen, Y.Q.; Xue, D. A review and evaluation of numerical tools for fractional calculus and fractional order controls. Int. J. Control. Spec. Issue Appl. Fract. Calc. Model. Anal. Des. Control Syst. 2017, 90, 1165–1181. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Process | Model | Reference |
|---|---|---|
| high order, delay dominant | FOPDT | [4,21,22] |
| NMP, open loop unstable, MIMO, poorly damped | FOPDT | [3] |
| high order | FOPDT | [23,24,25] |
| high order | FOPDT | [17] |
| Process | GM | PM | ||
|---|---|---|---|---|
| Real Process | 2.3741 | - | 0.5770 | - |
| FOPDT | 2.2348 | - | 0.6018 | - |
| FOPDT | 2.2612 | - | 0.6758 | - |
| Process | GM | PM | ||
|---|---|---|---|---|
| Real Process | 0.7011 | −97.3831 | 0.0824 | 0.1330 |
| FOPDT | 0.7011 | −101.7894 | 0.0824 | 0.1360 |
| FOPDT | 0.7996 | −58.6913 | 0.0831 | 0.1154 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muresan, C.I.; Ionescu, C.M. Generalization of the FOPDT Model for Identification and Control Purposes. Processes 2020, 8, 682. https://doi.org/10.3390/pr8060682
Muresan CI, Ionescu CM. Generalization of the FOPDT Model for Identification and Control Purposes. Processes. 2020; 8(6):682. https://doi.org/10.3390/pr8060682
Chicago/Turabian StyleMuresan, Cristina I., and Clara M. Ionescu. 2020. "Generalization of the FOPDT Model for Identification and Control Purposes" Processes 8, no. 6: 682. https://doi.org/10.3390/pr8060682
APA StyleMuresan, C. I., & Ionescu, C. M. (2020). Generalization of the FOPDT Model for Identification and Control Purposes. Processes, 8(6), 682. https://doi.org/10.3390/pr8060682