
Approaches for Motion Control Interface and Tele-Operated Overhead Crane Handling Tasks


Abstract
:1. Introduction
Related Works
2. Materials and Methods
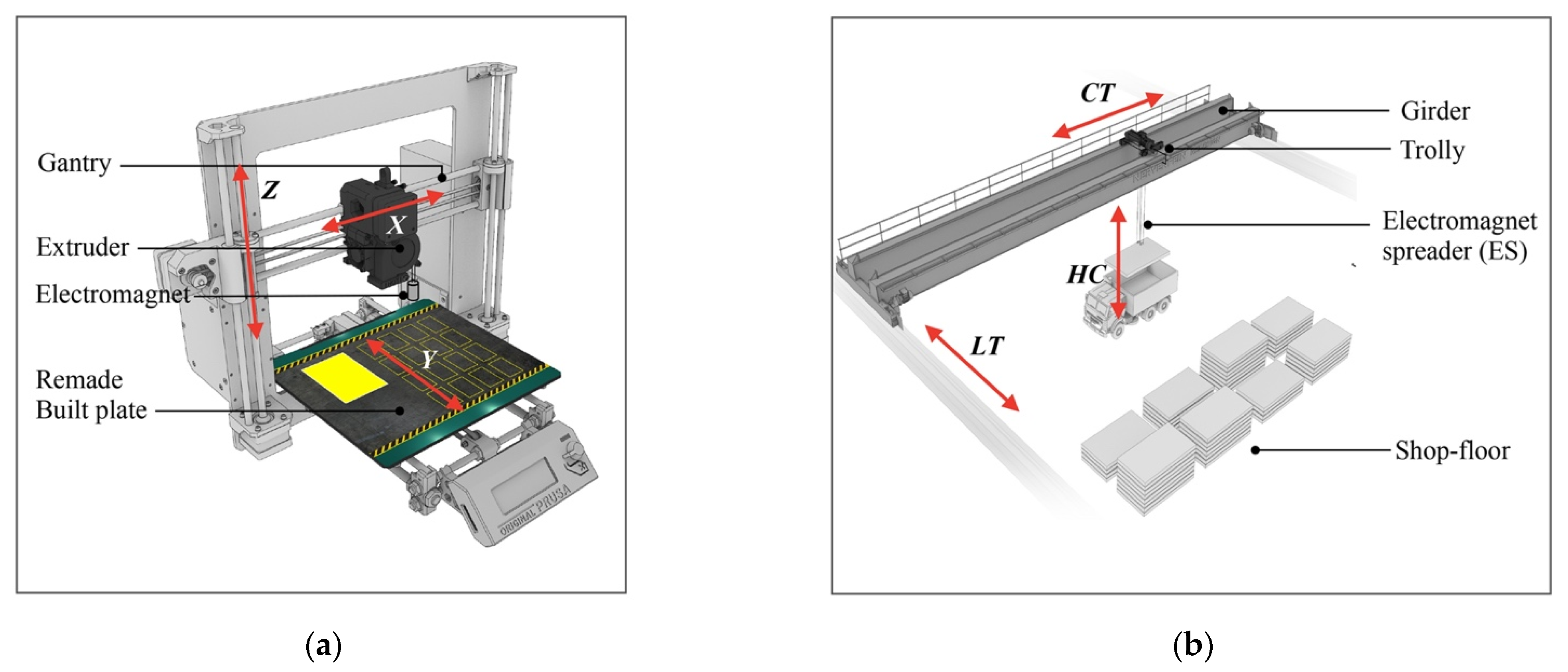
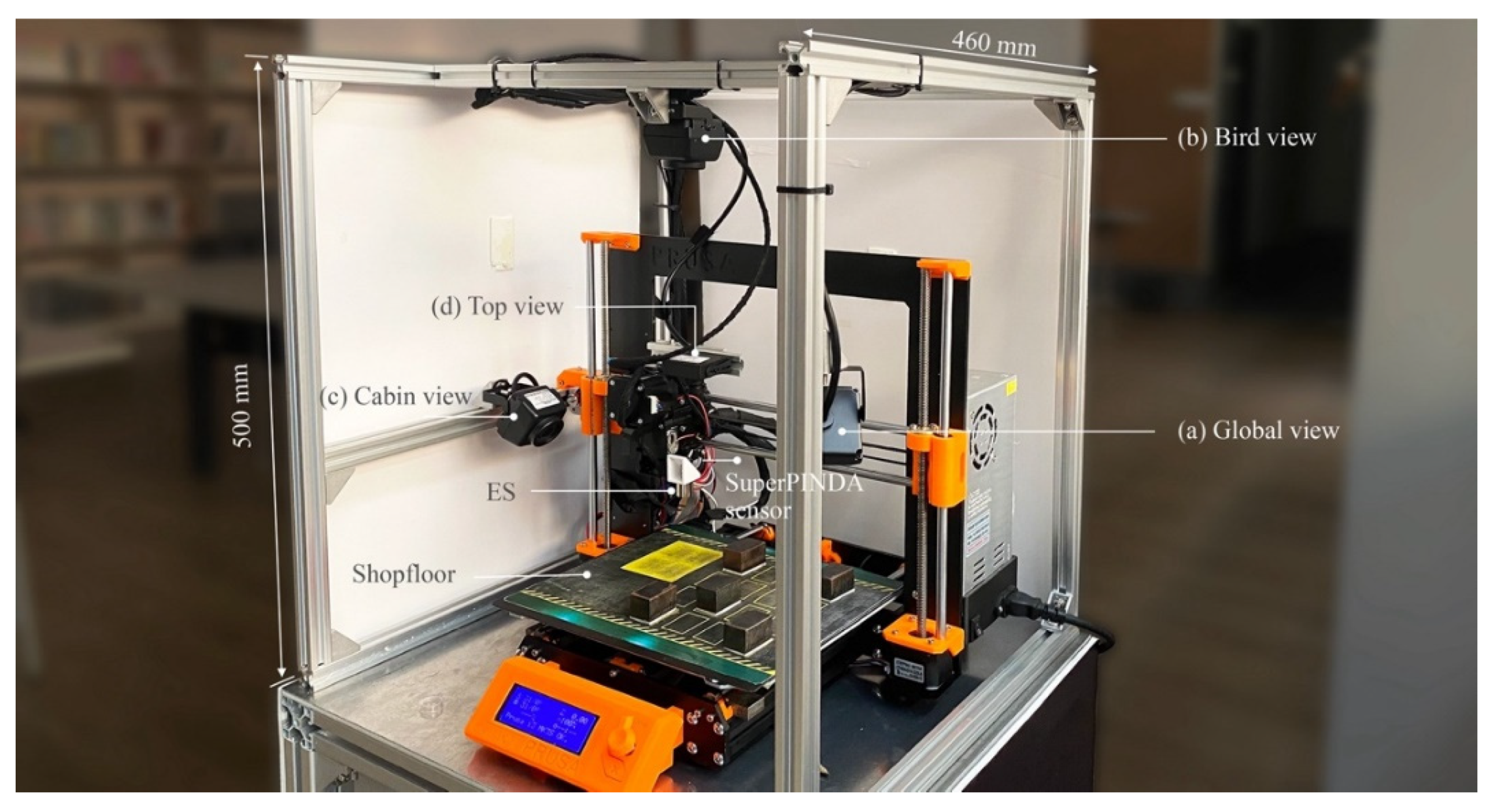
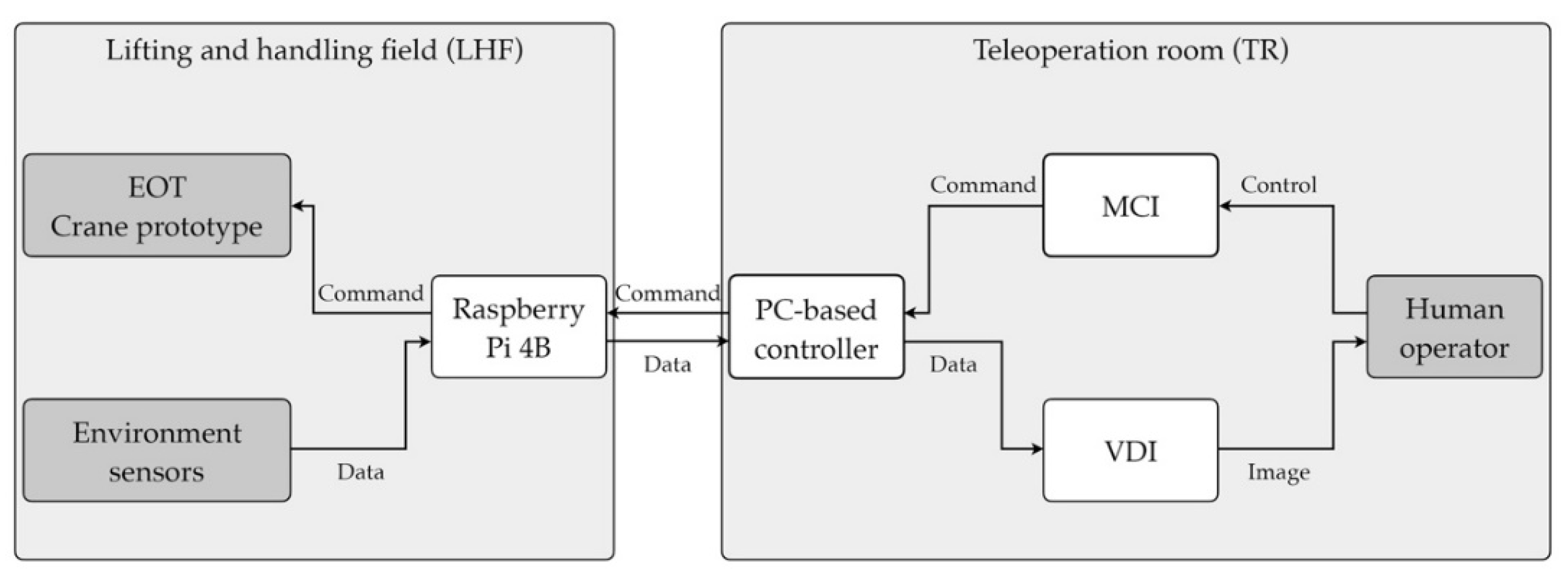
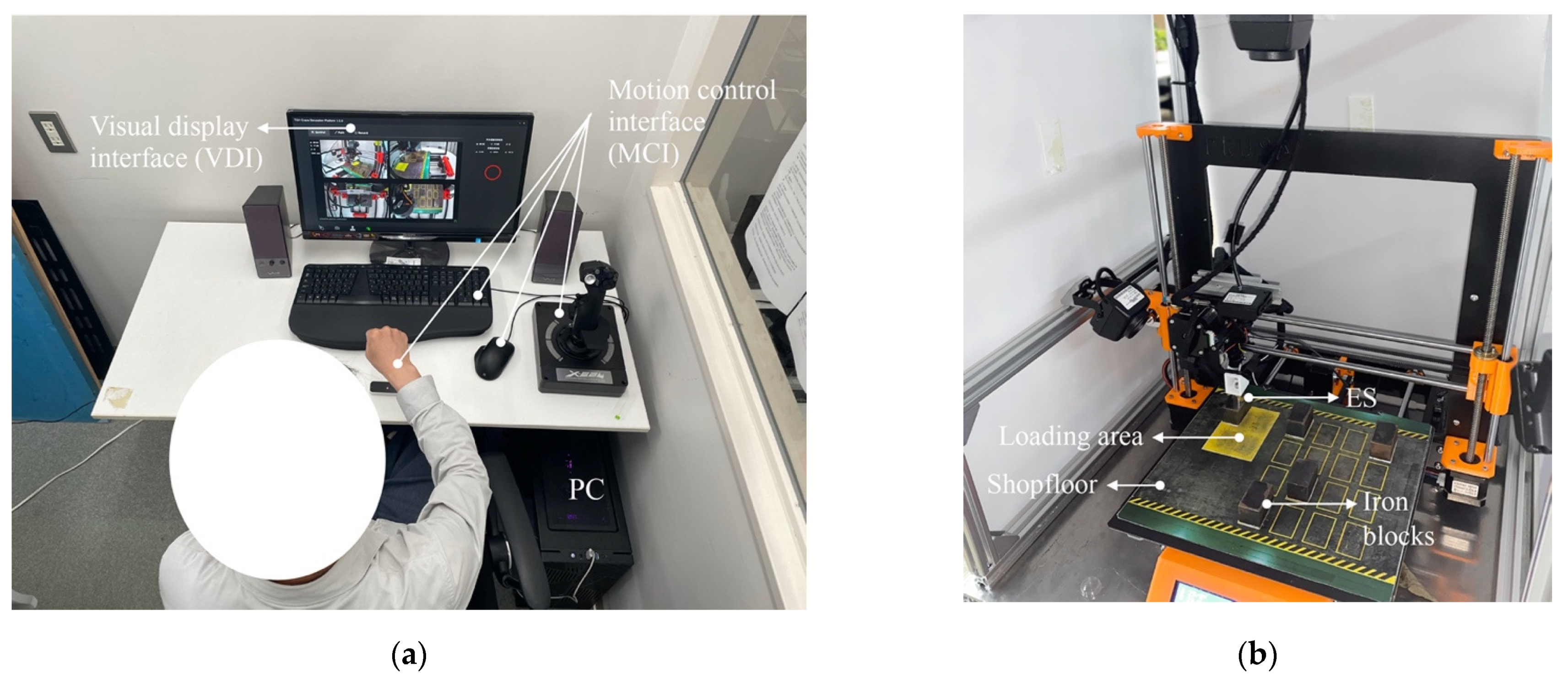
2.1. Prototype TOH Crane System
2.2. Approaches for Motion Control Interface (MCI)
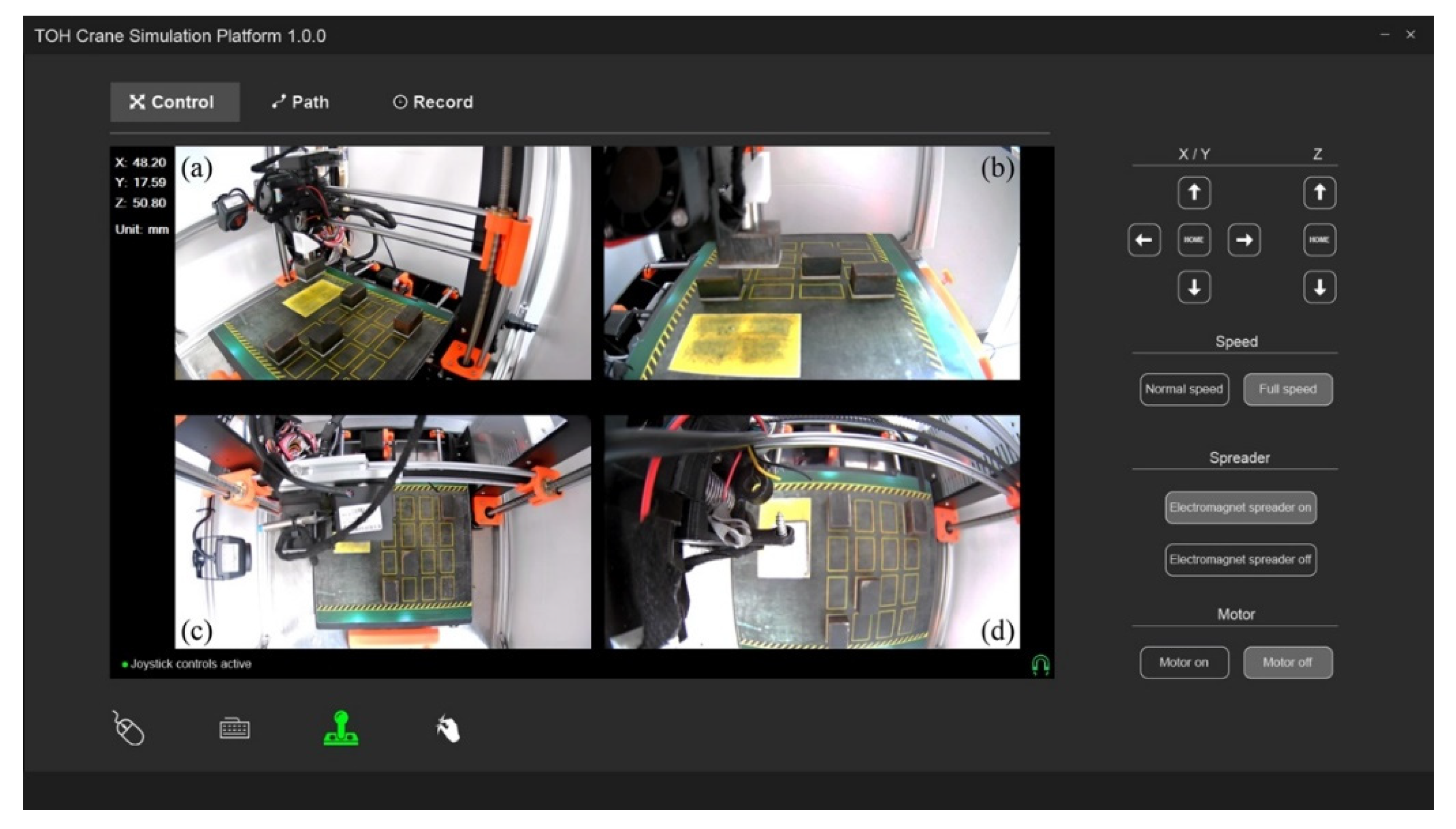
2.3. Tele-Operated Handling Tasks
2.4. Experiment
2.5. Performance and Workload Measures
2.6. After-Tasks Survey
2.7. Data Analysis and Data Visualization
3. Results
3.1. Task Completion Time
3.2. Accuracy
3.3. Heart Rate Variation
3.4. Weight of Workload
3.5. Weighted Score of Workload
3.6. Reproducibility
4. Discussion
4.1. Approaches for Motion Control Interface (MCI)
4.2. Comparison of Task Performance between Groups
4.3. Recommendation on MCI Development
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alonso, D.; Sánchez, P.; Ortiz, F.; Pastor, J.; Álvarez, B.; Iborra, A. Experiences Developing Safe and Fault-Tolerant Tele-Operated Service Robots. A Case Study in Shipyards. Serv. Robot. Appl. 2008, 2008, 159–182. [Google Scholar] [CrossRef]
- Chi, H.; Kim, J.; Chen, Y.; Kang, S.; Song, J.; Hsieh, S. Development of user interface for tele-operated cranes. Adv. Eng. Inform. 2012, 26, 641–652. [Google Scholar] [CrossRef]
- Tiwari, R.; Knowles, J.; Danko, G. Bucket trajectory classification of mining excavators. Autom. Constr. 2013, 31, 128–139. [Google Scholar] [CrossRef]
- Kim, D.; Oh, K.W.; Hong, D.; Kim, Y.K.; Hong, S.-H. Motion control of excavator with tele-operated system. In Proceedings of the 26th International Symposium on Automation and Robotics in Construction (ISARC), Austin, TX, USA, 24–27 June 2009; pp. 341–347. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.; Kim, J.; Lee, K.; Park, C.; Song, J.; Kang, D. Excavator tele-operation system using a human arm. Autom. Constr. 2009, 18, 173–182. [Google Scholar] [CrossRef]
- Hanna, K.; Hannu, K.; Helena, T. User experience targets as design drivers: A case study on the development of a remote crane operator station. In Proceedings of the 31st European Conference on Cognitive Ergonomics, New York, NY, USA, 26–28 August 2013; Volume 25, pp. 1–9. [Google Scholar] [CrossRef]
- Hannu, K.; Hanna, K.; Jaakko, H. Enhancing the user experience of the crane operator: Comparing work demands in two operational settings. In Proceedings of the 30th European Conference on Cognitive Ergonomics, New York, NY, USA, 28–31 August 2012; pp. 37–44. [Google Scholar] [CrossRef]
- Karvonen, H.; Koskinen, H.; Tokkonen, H.; Hakulinen, J. Evaluation of User Experience Goal Fulfillment: Case Remote Operator Station. Lecture Notes in Computer Science. In Proceedings of the Virtual, Augmented and Mixed Reality, Heraklion, Greece, 22–27 June 2014; Volume 8526. [Google Scholar] [CrossRef]
- Sen, R.N.; Das, S. An ergonomics study on compatibility of controls of overhead cranes in a heavy engineering factory in West Bengal. Appl. Ergon. 2000, 31, 179–184. [Google Scholar] [CrossRef]
- Lee, H.H. Modeling and control of a three-dimensional overhead crane. J. Dyn. Syst. Meas. Control 1998, 120, 471–476. [Google Scholar] [CrossRef]
- Chen, S.J.; Hein, B.; Wörn, H. Swing attenuation of suspended objects transported by robot manipulator using acceleration compensation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 2919–2924. [Google Scholar]
- Masoud, Z.N. Effect of hoisting cable elasticity on anti-sway controllers of quay-side container cranes. Nonlinear Dyn. 2009, 58, 129–140. [Google Scholar] [CrossRef]
- Ju, F.; Choo, Y.S.; Cui, F.S. Dynamic response of tower crane induced by the pendulum motion of the payload. Int. J. Solids Struct. 2006, 43, 376–389. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.Y.C.; Haas, E.C.; Barnes, M.J. Human performance issues and user interface design for teleoperated robots. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1231–1245. [Google Scholar] [CrossRef]
- Murphy, R.R. Human-Robot interaction in rescue robotics. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2004, 34, 138–153. [Google Scholar] [CrossRef]
- Voshell, M.; Woods, D.D.; Phillips, F. Overcoming the keyhole in human-robot coordination: Simulation and evaluation. Proc. Hum. Factors Ergon. Soc. Annu. Meet 2005, 49, 442–446. [Google Scholar] [CrossRef]
- Son, H.I.; Franchi, A.; Chuang, L.L.; Kim, J.; Bulthoff, H.H.; Giordano, P.R. Human-Centered Design and Evaluation of Haptic Cueing for Teleoperation of Multiple Mobile Robots. IEEE Trans. Cybern. 2013, 43, 597–609. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sano, A.; Fujimoto, H.; Takai, T. Human-centered scaling in micro-teleoperation. In Proceedings of the 2001 ICRA, IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; Volume 1, pp. 380–385. [Google Scholar] [CrossRef]
- Penizzotto, F.; Slawiñski, E.; Salinas, L.R.; Mut, V.A. Human-centered control scheme for delayed bilateral teleoperation of mobile robots. Adv. Robot. 2015, 29, 1253–1268. [Google Scholar] [CrossRef]
- Schneider, M.L.; Arble, F.B.; Olson, N.; Wolff, D. An overview of ergonomic considerations in computer systems. In Proceedings of the 7th Annual Computer Personnel Research Conference, Miami, FL, USA, 26–27 June 1980; pp. 116–124. [Google Scholar] [CrossRef]
- Kling, R. The organizational context of user-centered software designs. MIS Q. 1977, 1, 41–52. [Google Scholar] [CrossRef] [Green Version]
- Zekavat, P.R.; Bernold, L. Embedded Wireless communication platform addresses crane safety and efficiency. In Proceedings of the Construction Research Congress: Construction in a Global Network, Atlanta, GA, USA, 19–21 May 2014; pp. 309–318. [Google Scholar] [CrossRef] [Green Version]
- Jouppi, N.P. First steps towards mutually-immersive mobile telepresence. In Proceedings of the 2002 ACM Conference on Computer Supported Cooperative Work, New York, NY, USA, 16–20 November 2002; p. 354. [Google Scholar] [CrossRef]
- Burke, J.L.; Murphy, R.R.; Coovert, M.D.; Riddle, D.L. Moonlight in miami: Field study of human-robot interaction in the context of an urban search and rescue disaster response training exercise. Hum.-Comput. Interact. 2004, 19, 85–116. [Google Scholar] [CrossRef]
- Turro, N.; Khatib, O.; CosteManiere, E. Haptically Augmented Teleoperation. In Proceedings of the 2001 ICRA, IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; Volume 1, pp. 386–392. [Google Scholar] [CrossRef]
- Chi, H.L.; Kang, S.C.; Hsieh, S.H.; Wang, X. Optimization and evaluation of automatic rigging path guidance for tele-operated construction crane. In Proceedings of the ISARC, the International Symposium on Automation and Robotics in Construction, Sydney, Australia, 9–11 July 2014; Volume 31, p. 1. [Google Scholar] [CrossRef] [Green Version]
- Chi, H.L.; Kang, S.C.; Hsieh, S.H. Experiences on designing user interfaces for a tele-operated crane. In Proceedings of the 11th International Conference on Construction Applications of Virtual Reality, Weimar, Germany, 3–4 November 2001; pp. 413–424. [Google Scholar]
- Abdullah, U.N.N.; Handroos, H. Investigation on sense of control parameters for joystick interface in remote operated container crane application. Proc. AIP Conf. 2017, 1885, 020077. [Google Scholar] [CrossRef]
- Karray, F.; Alemzadeh, M.; Abou Saleh, J.; Arab, M.N. Human-computer interaction: Overview on state of the art. Int. J. Smart Sens. Intell. Syst. 2017, 1, 137–159. [Google Scholar] [CrossRef] [Green Version]
- Fiorini, P.; Bejczy, A.K.; Schenker, P.S. Integrated interface for advanced teleoperation. IEEE Control Syst. Mag. 1993, 13, 15–20. [Google Scholar] [CrossRef]
- Olivares, R.; Zhou, C.; Bodenheimer, B.; Adams, J.A. Interface evaluation for mobile robot teleoperation. In Proceedings of the ACM Southeast Conference, Savannah, GA, USA, 7–8 March 2003; Volume 112, p. 118. [Google Scholar]
- Alves, R.L.; Vassallo, R.F.; Freire, E.O.; Bastos-Filho, T.F. Teleoperation of a mobile robot through the Internet. In Proceedings of the 43rd IEEE Midwest Symposium on Circuits and Systems, Lansing, MI, USA, 8–11 August 2000; Volume 2, pp. 930–933. [Google Scholar] [CrossRef]
- Sian, N.E.; Yokoi, K.; Kajita, S.; Kanehiro, F.; Tanie, K. Whole body teleoperation of a humanoid robot development of a simple master device using joysticks. J. Robot. Soc. Jpn. 2004, 22, 519–527. [Google Scholar] [CrossRef]
- Zhu, D.; Gedeon, T.; Taylor, K. “Moving to the centre”: A gaze-driven remote camera control for teleoperation. Interact. Comput. 2011, 23, 85–95. [Google Scholar] [CrossRef]
- Huysmans, M.A.; De Looze, M.P.; Hoozemans, M.J.; Van Der Beek, A.J.; Van Dieen, J.H. The effect of joystick handle size and gain at two levels of required precision on performance and physical load on crane operators. Ergonomics 2006, 49, 1021–1035. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Grasshoff, J.; Hansen, L.; Kuhlemann, I.; Ehlers, K. 7DoF Hand and Arm Tracking for Teleoperation of Anthropomorphic Robots. In Proceedings of the ISR, 47st International Symposium on Robotics, Munich, Germany, 21–22 June 2016; pp. 1–8. [Google Scholar]
- Doisy, G.; Ronen, A.; Edan, Y. Comparison of three different techniques for camera and motion control of a teleoperated robot. Appl. Ergon. 2017, 58, 527–534. [Google Scholar] [CrossRef]
- Mower, C.E.; Merkt, W.; Davies, A.; Vijayakumar, S. Comparing Alternate Modes of Teleoperation for Constrained Tasks. In Proceedings of the IEEE 15th International Conference on Automation Science and Engineering, Vancouver, BC, Canada, 22–26 August 2019; pp. 1497–1504. [Google Scholar] [CrossRef] [Green Version]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. Adv. Phycol. 1988, 52, 139–183. [Google Scholar]
- Prusa Research: Prusa i3 MK3S+. Available online: https://www.prusa3d.com/ (accessed on 13 March 2021).
- Bessler, N.; Ogiermann, D.; Buchholz, M.-B.; Santel, A.; Heidenreich, J.; Ahmmed, R.; Zaehres, H.; Brand-Saberi, B. Nydus One Syringe Extruder (NOSE): A Prusa i3 3D printer conversion for bioprinting applications utilizing the FRESH-method. HardwareX 2019, 6, e00069. [Google Scholar] [CrossRef]
- Roscoe, A.H. Assessing pilot workload. Why measure heart rate, HRV and respiration. Biol. Psychol. 1992, 34, 259–287. [Google Scholar] [CrossRef]
- Roscoe, A.H. Heart rate as a psychophysiological measure for in-flight workload assessment. Ergonomics 1993, 36, 1055–1062. [Google Scholar] [CrossRef] [PubMed]
- Turner, J.R.; Carroll, D. Heart rate and oxygen consumption during mental arithmetic, a video game, and graded exercise: Further evidence of metabolically-exaggerated cardiac adjustments. Psychophysiology 1985, 22, 261–267. [Google Scholar] [CrossRef] [PubMed]
- Biferno, M.A. Mental Workload Measurement: Event-Related Potentials and Ratings of Workload and Fatigue (NASA CR 177354), Moffett Field; NASA Ames Research Center: Mountain View, CA, USA, 1985.
- Amza, C.G.; Zapciu, A.; Popescu, D. Paste Extruder—Hardware Add-On for Desktop 3D Printers. Technologies 2017, 5, 50. [Google Scholar] [CrossRef] [Green Version]
- Raspberry Pi Foundation: Raspberry Pi 4B. Available online: https://www.raspberrypi.org/products/raspberry-pi-4-model-b/ (accessed on 27 March 2021).
- OctoPrint. Available online: https://octoprint.org/ (accessed on 27 March 2021).
- McLoone, H.E.; Jacobson, M.; Hegg, C.; Johnson, P.W. User-centered design and evaluation of a next generation fixed-split ergonomic keyboard. Work 2010, 37, 445–456. [Google Scholar] [CrossRef]
- Tao, D.; Diao, X.; Wang, T.; Guo, J.; Qu, X. Freehand interaction with large displays: Effects of body posture, interaction distance and target size on task performance, perceived usability and workload. Appl. Ergon. 2021, 93, 103370. [Google Scholar] [CrossRef]
- Logitech G X56 H.O.T.A.S. Available online: https://support.logi.com/hc/zh-cn/articles/360024844133 (accessed on 26 April 2021).
- Ultraleap for Developers. Available online: https://developer.leapmotion.com/ (accessed on 16 May 2021).
- Ando, N.; Lee, J.H.; Hashimoto, H. A study on influence of time delay in teleoperation. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Atlanta, GA, USA, 19–23 September 1999; pp. 317–322. [Google Scholar] [CrossRef]
- Shahdi, A.; Sirouspour, S. Adaptive/Robust Control for Time-Delay Teleoperation. IEEE Trans. Robot. 2009, 25, 196–205. [Google Scholar] [CrossRef]
- Smith, C.; Jensfelt, P.A. Predictor for operator input for time-delayed teleoperation. Mechatronics 2010, 20, 778–786. [Google Scholar] [CrossRef]
- Jackson, J.A.; Srinivasan, D.; Mathiassen, S.E. Consistent individual motor variability traits demonstrated by females performing a long-cycle assembly task under conditions differing in temporal organization. Appl. Ergon. 2020, 85, 103046. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P | K | O | HG | |
|---|---|---|---|---|
| Device name | Microsoft ergonomic mouse | Microsoft ergonomic keyboard | Logitech G X56 | Leap motion |
| Platform | PC-driven | PC-driven | PC-driven | PC-driven |
| Hand action | Pointing and clicking | Pressing | Orienting | Gestures |
| CT control | ←, → button in X axis | A, D keys | Stick ←, → | Right fist moves in X axis |
| LT control | ↑, ↓ button in Y axis | W, S keys | Stick ↑, ↓ | Right fist moves in Y axis |
| HC control | ↑, ↓ button in Z axis | ↑, ↓ keys | POV ↑, ↓ | Right fist moves in Z axis |
| ES control | On/off button | Space key | C stick | Left fist releasing |
| Full speed | Full speed button | Shift key | Fully orienting | Faster moving |
| Hide cursor | N/A | N/A | Pinky | N/A |
| Trial | Completion Time 1 | Accuracy | Heart Rate Variation 2 | Weight of Physical Demand | Weight of Mental Demand | Weighted Score of Workload | ||
|---|---|---|---|---|---|---|---|---|
| Novice | Expert | Novice | Expert | Novice | Novice | Novice | Novice | |
| P | 635.48 ± 169.64 | 1132.73 ± 295.48 | 3.76 ± 1.24 | 4.00 ± 1.10 | 6.79 ± 8.21 | 2.10 ± 1.51 | 2.24 ± 1.45 | 47.09 ± 10.78 |
| K | 634.24 ± 198.29 | 1038.55 ± 233.53 | 3.76 ± 0.89 | 4.45 ± 0.94 | 8.16 ± 7.13 | 1.86 ± 1.65 | 2.29 ± 1.27 | 51.86 ± 9.34 |
| O | 553.76 ± 238.94 | 798.00 ± 135.06 | 3.81 ± 1.21 | 5.00 ± 0.00 | 6.92 ± 5.41 | 2.10 ± 1.67 | 2.33 ± 1.43 | 49.81 ± 13.22 |
| HG | 1006.67 ± 365.15 | 1374.91 ± 377.18 | 3.14 ± 1.32 | 3.64 ± 1.43 | 9.17 ± 5.97 | 3.71 ± 1.42 | 2.05 ± 1.53 | 72.73 ± 11.32 |
| Trials | Completion Time | Weight of Physical Demand | Weighted Score of Workload | |||
|---|---|---|---|---|---|---|
| t-Value | p-Value | z-Value | p-Value | t-Value | p-Value | |
| P-K | 0.036 | 0.972 | −0.476 | 0.634 | −1.983 | 0.061 |
| P-O | 1.709 | 0.103 | −0.103 | 0.918 | −0.899 | 0.379 |
| P-HG | −4.456 | 0.0001 | −3.590 | 0.0001 | −8.526 | 0.0001 |
| K-O | 2.068 | 0.052 | −0.682 | 0.495 | 1.065 | 0.299 |
| K-HG | −5.246 | 0.0001 | −3.405 | 0.0001 | −9.565 | 0.0001 |
| O-HG | −5.482 | 0.0001 | −3.375 | 0.0001 | −6.803 | 0.0001 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Luo, J.; Zhang, H.; Onchi, E.; Lee, S.-H. Approaches for Motion Control Interface and Tele-Operated Overhead Crane Handling Tasks. Processes 2021, 9, 2148. https://doi.org/10.3390/pr9122148
Yu Z, Luo J, Zhang H, Onchi E, Lee S-H. Approaches for Motion Control Interface and Tele-Operated Overhead Crane Handling Tasks. Processes. 2021; 9(12):2148. https://doi.org/10.3390/pr9122148
Chicago/Turabian StyleYu, Zhefan, Jianping Luo, Han Zhang, Eiji Onchi, and Seung-Hee Lee. 2021. "Approaches for Motion Control Interface and Tele-Operated Overhead Crane Handling Tasks" Processes 9, no. 12: 2148. https://doi.org/10.3390/pr9122148
APA StyleYu, Z., Luo, J., Zhang, H., Onchi, E., & Lee, S.-H. (2021). Approaches for Motion Control Interface and Tele-Operated Overhead Crane Handling Tasks. Processes, 9(12), 2148. https://doi.org/10.3390/pr9122148