Abstract
We establish a class of nonlinear fractional differential systems with distributed time delays in the controls and impulse effects. We discuss the controllability criteria for both linear and nonlinear systems. The main results required a suitable Gramian matrix defined by the Mittag–Leffler function, using the standard Laplace transform and Schauder fixed-point techniques. Further, we provide an illustrative example supported by graphical representations to show the validity of the obtained abstract results.
Keywords:
fractional differential equations; Caputo fractional derivative; discrete-delays; distributed-delays; impulses MSC:
93B05; 34A37; 26A33; 33E12
1. Introduction
Fractional calculus has become a topic of growing interest in Applied Mathematics because of its potential to model many physical phenomena; in fact, it has become a subject of significant interest to many researchers, scientists and engineers, since it applies to a wide range of applications in physics, mathematics and engineering; see, for instance [1,2,3,4,5,6,7,8,9,10,11]. Concerning different applications and mathematical models, the literature contains, among many others, reaction–diffusion problems [12], neural networks [13], a COVID-19 model [14] and an anomalous transport model [15].
A delay differential equation is a differential equation where the time derivatives at the current time depend on the solution and possibly its derivatives at previous times. Instead of a simple initial condition, an initial history function needs to be specified. Fractional differential equations with delays have recently played a significant role in modelling in many areas of science. Appropriately, fractional differential equations are further considered to be alternative models to nonlinear differential equations. For more details, see the monographs of Kilbas et al. [16], Miller and Ross [17], and Podlubny [18]. Mathematical models for systems with distributed delays in the controls occur in the study of agricultural economics and population dynamics [19,20].
On the other hand, it is noted that controllability is one of the most important qualitative behaviours of a dynamical structure. Based on this fact, we can infer that it is possible to steer any initial state of the system to any final state in some finite time using an admissible control. Moreover, controllability outcomes can be acquired by using non-identical techniques, for which the fixed point theory is the most powerful tool [21]. Therefore, the fusion of fractional-order derivatives and integrals in control theory lead to better results than integer order approaches. Recently, Balachandran et al. [22] proved the relative controllability of fractional dynamical systems with distributed delays in the controls. In [23], the authors established some analysis for the stability and controllability of a fractional damped differential system with non-instantaneous impulses supported by numerical treatments. Furthermore, the dynamics of developing processes is frequently subjected to immediate changes such as shocks, harvesting or natural disasters, and so on. These types of short-term performances are regularly treated as having acted instantaneously or in the form of impulses. Zhang et al. [24] proved the controllability of an impulsive fractional differential equation with a state delay. Very recently, in [25], the authors proved in a relative controllability analysis fractional order differential equations with multiple time delays. For further works, the readers may refer to [26,27,28,29]. Motivated by the above statements and extending the results of [22,25], in this work, we are concerned with the problem of controllability of impulsive fractional differential systems with distributed delays in controls.
where represents the Caputo fractional derivative of order , and denotes a constant matrix, is the state variable and the third integral term is in the Lebesgue–Stieltjes sense with respect to . Let and be given. The control input for all , and denotes the function on , defined by for . is an dimensional matrix continuous in t for fixed and is of bounded variation in on for each and continuous from left in on the interval. , is the initial state function, where denotes the space of all continuous functions mapping the interval into is continuous for , and
represent the right and left limits of at and the discontinuous points
where , and , which implies that the solution of the system (1) is left continuous at .
The notable contributions of our work is as follows:
- Nonlinear impulsive fractional differential systems with distributed delays in controls are considered.
- The solution representation is formulated via an unsymmetric Fubini’s theorem.
- The controllability of the linear system is proved by using the controllability Gramian operator.
- The controllability of the nonlinear system is investigated by employing the Schauder fixed-point theorem.
- Numerical treatments are given using MATLAB.
Our paper is organized as follows. In Section 2, we present some basic definitions and preliminary facts, which will be used in order to obtain our desired results. In Section 3, we state and prove the main results of this work. In Section 4, an example is given to illustrate the effectiveness and validity of our controllability results. Finally, we conclude our results and suggest new directions in Section 5.
2. Preliminaries
Throughout the paper, denotes the space of all piecewise left-continuous functions mapping the interval into .
Definition 1 ([18]).
The Caputo fractional derivative of order , is defined as
where the function has absolutely continuous derivatives up to order . If , then
Definition 2 ([18]).
The Mittag–Leffler function in two parameters is defined as
so that , denotes the complex plane. The general Mittag–Leffler function satisfies
The linear fractional delay differential system without impulses is considered as follows.
The nonlinear fractional delay differential system without impulses is considered as follows.
Lemma 1.
For , if is continuous and exponentially bounded, then the solution of the system (3) can be represented as
Proof.
Let , employing the Laplace transform with respect to t on both sides of system (3), the result is
Applying the convolution theorem of the Laplace transform to (5), we get
Employing the inverse Laplace transform, then we have
Using the well-known result of the unsymmetric Fubini theorem [30] and the change of order of the integration to the last term, we have
where
and denotes the integration of the Lebesgue–Stieltjes sense with respect to the variable in the function , hence the proof. □
Lemma 2.
Proof.
The proof is similar to Lemma 1. Hence, it is eliminated. □
Proof.
For , the proof is obvious. For , by Lemma 2,
If , using (7), we have
If , then
If , using similar reasoning, we get
The proof is complete. □
3. Controllability Results
In this section, we prove the controllability result of the labelled system.
Definition 3.
Theorem 1.
Structure (1) is controllable on if and only if the Gramian matrix
is nonsingular for some , where
and ∗ denotes the matrix transpose.
Proof.
Assume that is nonsingular, then is well defined. If , let the control function is
By substituting in (7) and inserting (11), we get
Thus, system (1) is controllable on . For , we take the control function as
By substituting in (8) and inserting (12), we get
Hence, system (1) is controllable on . For , the control function, u, is defined by
By substituting in (9) and installing the result in (13), similar reasoning gives . Hence, structure (1) is controllable on .
Conversely, assume that is singular, If , there is a vector , such that . That is,
Because structure (1) is controllable, there exist control inputs, , so that
By combining (14) and (15), we get
By multiplying on both sides of (16), we get
According to , we have . Thus, . This is a contradiction to , hence the proof. □
Definition 4.
Theorem 2.
System (3) is completely controllable on if and only if W is nonsingular for some .
Proof.
Assume that W is nonsingular. Let be continuous on , and let . The control function u can be taken as
where
By substituting in the solution of (7), we get
and, using (17) in (18), we have
Now, we assume that W is singular. There exists a non-zero, z, so that . That is, . . Take and the terminal point, . Since the system is controllable, there exists a control, , on J that steers the response to at , that is, . From , and for . On the other hand,
hence
Therefore, , which yields a contradiction that . Hence, W is nonsingular, hence the proof. □
Theorem 3.
Proof.
Let be continuous on , and let . Let Q be the Banach space of all the continuous functions , with the norm , where and . The operator is defined by , where
for and . Let
Then,
We make the following assumption about the function f, as in [31]. Letting c and d be each pair of the positive constants, there exists a positive constant, r, so that, if , then
then, any , as long as , will also satisfy (19). Let r be chosen so that (19) is satisfied and . Therefore, if and , then . It follows that . Therefore, and, hence, , we have . Thus, if and , then maps into itself. The operator is continuous since f is continuous. Let be a bounded subset of Q. Consider a sequence, , contained in ; let . Hence, is an equicontinuous and uniformly bounded sequence on . is sequentially compact; hence, the closure is sequentially compact. Thus, is completely continuous. Since is closed, bounded and convex, using the Schauder fixed-point theorem, has a fixed point , so that .
Therefore,
where
Therefore, is the solution to the system, and
Hence, the system (4) is completely controllable. □
4. Example
Consider the following linear fractional dynamical system:
for and . Here,
and
Further,
and
where
Also,
such that,
Using matrix calculation,
Hence, by Theorem 2, the fractional system (20) is completely controllable on . Based on our chosen values, we have drawn diagrams for the state function with control Figure 1, the state function without control Figure 2 and the steering control function Figure 3 respectively.
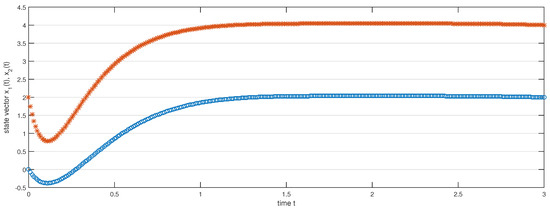
Figure 1.
State with control function steers initial state to final state .
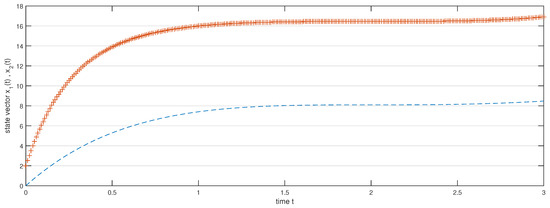
Figure 2.
State vectors without control function.
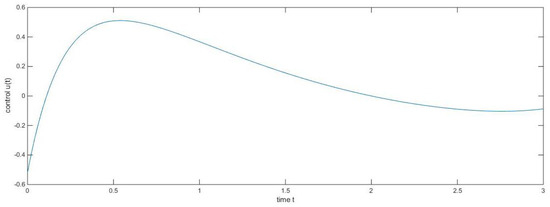
Figure 3.
The steering control function.
Remark 1.
Consider the following nonlinear impulsive fractional dynamical system
Under appropriate choices and by following the previous techniques, Theorem 3 can be applied to guarantee the controllability result of the fractional system (21), and hence the diagrams can be also associated.
5. Conclusions
We investigated the concept of controllability criteria for nonlinear fractional differential systems with state delays and distributed delays in the controls with impulsive perturbations. We used the unsymmetric Fubini’s theorem with the change of order of integration, and also, by effecting the notion of Mittag–Leffler’s matrix function, we find the solution representation for the considered system. Further, by applying the controllability Gramian matrix, we studied the controllability results for the system addressed in the preliminary section. Moreover, we have given a numerical example that justifies the exactness of the obtained theoretical results in our main results. As further directions to be considered in our future projects, we intend to combine the above analysis with the topics of differential inclusion, fractional discreet calculus and variable order derivatives.
Author Contributions
Conceptualization, B.S.V.; methodology, B.S.V.; validation, A.D. and V.E.F.; formal analysis, V.A.; investigation, A.D. and V.E.F.; writing–original draft preparation, B.S.V.; writing–review and editing, A.D. and V.A.; supervision, A.D.; project administration, V.A. All authors have read and agreed to the published version of the manuscript.
Funding
The second author was supported by RUSA-Phase 2.0 grant sanctioned vide letter No.F 24-51/2014-U, Policy (TN Multi-Gen), Dept. of Edn. Govt. of India, Dt.09.10.2018; and the third author was supported by the Russian Science Foundation, project number 22-21-20095.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Jahanshahi, H.; Munoz-Pacheco, J.M.; Bekiros, S.; Alotaibi, N.D. A fractional-order SIRD model with time-dependent memory indexes for encompassing the multi-fractional characteristics of the COVID-19. Chaos Solitons Fractals 2021, 143, 110632. [Google Scholar] [CrossRef] [PubMed]
- Hendy, A.S.; Taha, T.R.; Suragan, D.; Zaky, M.A. An energy-preserving computational approach for the semilinear space fractional damped Klein–Gordon equation with a generalized scalar potential. Appl. Math. Model. 2022, 108, 512–530. [Google Scholar] [CrossRef]
- Jumarie, J. An approach via fractional analysis to non-linearity induced by coarse-graining in space. Nonlinear Anal. Real World Appl. 2010, 11, 535–546. [Google Scholar] [CrossRef]
- Rehman, A.U.; Riaz, M.B.; Rehman, W.; Awrejcewicz, J.; Baleanu, D. Fractional Modeling of Viscous Fluid over a Moveable Inclined Plate Subject to Exponential Heating with Singular and Non-Singular Kernels. Math. Comput. Appl. 2022, 27, 8. [Google Scholar] [CrossRef]
- Luchko, Y.F.; Rivero, M.; Trujillo, J.J.; Velasco, M.P. Fractional models, non-locality, and complex systems. Comput. Math. Appl. 2010, 59, 1048–1056. [Google Scholar] [CrossRef]
- Manimaran, J.; Shangerganesh, L.; Debbouche, A.; Cortés, J.C. A time-fractional HIV infection model with nonlinear diffusion. Results Phys. 2021, 25, 104293. [Google Scholar] [CrossRef]
- Guo, T.L.; Jiang, W. Impulsive fractional functional differential equations. Comput. Math. Appl. 2012, 64, 3414–3424. [Google Scholar] [CrossRef]
- Sivasankar, S.; Udhayakumar, R.; Subramanian, V.; AlNemer, G.; Elshenhab, A.M. Existence of Hilfer Fractional Stochastic Differential Equations with Nonlocal Conditions and Delay via Almost Sectorial Operators. Mathematics 2022, 10, 4392. [Google Scholar] [CrossRef]
- Fang, H.; Song, M. Existence results for fractional order impulsive functional differential equations with multiple delays. Adv. Differ. Equ. 2018, 2018, 139. [Google Scholar] [CrossRef]
- Al-Sawalha, M.M.; Ababneh, O.Y.; Shah, R.; Khan, A.; Nonlaopon, K. Numerical analysis of fractional-order Whitham–Broer–Kaup equations with non-singular kernel operators. AIMS Math. 2023, 8, 2308–2336. [Google Scholar] [CrossRef]
- Al-Sawalha, M.M.; Shah, R.; Nonlaopon, K.; Khan, I.; Ababneh, O.Y. Fractional evaluation of Kaup–Kupershmidt equation with the exponential-decay kernel. AIMS Math. 2023, 8, 3730–3746. [Google Scholar] [CrossRef]
- Gafiychuk, V.; Datsun, B.; Meleshko, V. Mathematical modelling of time fractional reaction-diffusion systems. J. Comput. Appl. Math. 2008, 220, 215–225. [Google Scholar] [CrossRef]
- Udhayakumar, K.; Rihan, F.A.; Rakkiyappan, R.; Cao, J. Fractional-order discontinuous systems with indefinite LKFs: An application to fractional-order neural networks with time delays. Neural Netw. 2022, 145, 319–330. [Google Scholar] [CrossRef]
- Kumar, P.; Erturk, V.S.; Murillo-Arcila, M. A new fractional mathematical modelling of COVID-19 with the availability of vaccine. Results Phys. 2021, 24, 104213. [Google Scholar] [CrossRef] [PubMed]
- Metzler, R.; Klafter, J. The restaurant at the end of the random walk: Recent developments in the description of anomalous transport by fractional dynamics. J. Phys. A Math. Gen. 2004, 37, 161–208. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; North-Holland Mathematics Studies 204; Elsevier Science B.V.: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley: New York, NY, USA, 1993. [Google Scholar]
- Podlubny, I. Fractional Differential Equations, Volume 198 of Mathematics in Science and Engineering; Technical University of Kosice: Kosice, Slovak Republic, 1999. [Google Scholar]
- Artstein, Z. Linear systems with delayed controls: A reduction. IEEE Trans. Autom. Control. 1982, 27, 869–879. [Google Scholar] [CrossRef]
- Artstein, Z.; Tadmor, G. Linear systems with indirect controls: The underlying measures. SIAM J. Control. Optim. 1982, 20, 96–111. [Google Scholar] [CrossRef]
- Balachandran, K.; Dauer, J.P. Controllability of nonlinear systems via fixed point theorems. J. Optim. Theory Appl. 1987, 53, 345–352. [Google Scholar] [CrossRef]
- Balachandran, K.; Zhou, Y.; Kokila, J. Relative controllability of fractional dynamical systems with distributed delays in control. Comput. Math. Appl. 2012, 64, 3201–3209. [Google Scholar] [CrossRef]
- Kumar, V.; Malik, M.; Debbouche, A. Stability and controllability analysis of fractional damped differential system with non-instantaneous impulses. Appl. Math. Comput. 2021, 391, 125633. [Google Scholar] [CrossRef]
- Zhang, H.; Cao, J.; Jiang, W. Controllability criteria for linear fractional differential systems with state delay and impulses. J. Appl. Math. 2013, 2013, 146010. [Google Scholar] [CrossRef]
- Vadivoo, B.S.; Jothilakshmi, G.; Almalki, Y.; Debbouche, A.; Lavanya, M. Relative controllability analysis of fractional order differential equations with multiple time delays. Appl. Math. Comput. 2022, 28, 127192. [Google Scholar] [CrossRef]
- He, B.B.; Zhou, H.C.; Kou, C.H. The controllability of fractional damped dynamical systems with control delay. Commun. Nonlinear Sci. Numer. Simul. 2016, 32, 190–198. [Google Scholar] [CrossRef]
- Guo, T.L. Controllability and observability of impulsive fractional linear time-invariant system. Comput. Math. Appl. 2012, 64, 3171–3182. [Google Scholar] [CrossRef]
- Jiang, W.; Song, W.Z. Controllability of singular systems with control delay. Automatica 2001, 37, 1873–1877. [Google Scholar]
- Wei, J. The controllability of fractional control systems with control delay. Comput. Math. Appl. 2012, 64, 3153–3159. [Google Scholar] [CrossRef]
- Cameron, R.H.; Martin, W.T. An unsymmetric Fubini theorem. Bull. Am. Math. Lett. 2011, 24, 2019–2023. [Google Scholar] [CrossRef]
- Dauer, J.P. Nonlinear perturbations of quasi-linear control systems. J. Math. Anal. Appl. 1976, 54, 717–725. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).