Abstract
This paper proposes a high-performing, hybrid method for Maximum Power Point Tracking (MPPT) in photovoltaic (PV) systems. The approach is based on an intelligent Nonlinear Discrete Proportional–Integral–Derivative (N-DPID) controller with the Perturb and Observe (P&O) method. The feedback gains derived are optimized by a metaheuristic algorithm called Particle Swarm Optimization (PSO). The proposed methods appear to present adequate solutions to overcome the drawbacks of existing methods despite various weather conditions considered in the analysis, providing a robust solution for dynamic environmental conditions. The results showed better performance and accuracy compared to those encountered in the literature. We also recall that this technique provides a systematic design procedure in the search for the MPPT in photovoltaic (PV) systems that has not yet been documented in the literature to the best of our knowledge.
1. Introduction
Energy has been the main driver of human life for a long time and plays a vital role in countries’ daily activity and development. Energy production is essential to all human activities, and the need for energy in developing countries has increased dramatically in recent years. The majority of the energy generated globally comes from fossil fuels, such as coal, oil, and natural gas [1,2]. These fuels release greenhouse gases into the atmosphere, which increases pollution [3,4,5]. Moreover, these fuels are in perpetual depletion, which dangerously reduces the reserves of these types of energy for future generations. Faced with all these grievances, countries with enormous energy need to resort to renewable energy such as solar, hydro, wind, fuel cells, and geothermal energy [6,7]. These sources are up-and-coming solutions to compete with other energy sources. Their main advantages are that they are inexhaustible and non-polluting. Their exploitations allow humans to ensure their energy needs in the case of countries with high energy expectations, and their strategic position makes them an ideal candidate for electrical installations using solar energy.
Solar energy is readily available due to the advancement of research and is currently among the most significant sources of environmentally friendly renewable energy [8,9,10]. A photovoltaic system is used to exploit this energy, but it depends on climatic conditions such as solar irradiation and temperature [11,12]. These climatic variations cause fluctuations around the maximum power point. Therefore, researchers have established and used several methods for tracking the maximum power point of photovoltaic (PV) systems. These schemes consist of associating a controller called Maximum Power Point Tracking (MPPT) to the inverter, which performs a permanent search for the maximum power point (MPP) [13]. The Perturb and Observe (P and O) method is the simplest and most widely used method in the world, and it does not require prior knowledge of the PV system characteristics and is easy to implement with analog and digital circuits [14,15]. However, this technique suffers from oscillations around the MPP due to its fixed variation step during the search process. Moreover, it offers low efficiency and slow response and does not track the MPP well in varying environmental conditions [16,17,18]. The conductance increment method offers better performance than the P&O scheme but also experiences oscillations around the MPP. Moreover, this method has a complex MPP search process because it requires a variation of the current and voltage of the PV panel [19,20]. Several researchers have mobilized to search for techniques to improve the P&O method, which allows for obtaining good performance with hybrid systems based on artificial intelligence (AI) such as artificial neural networks (ANN) [21] and fuzzy logic [22,23]. However, their implementation is difficult because of their high computational complexity, so finding a balance between accuracy and simplicity is essential.
In the control engineering area, developing a controller that is easy to implement and performs well is desired, which can adapt to changing environmental conditions, provide quality service, and effectively track the MPP [24,25]. It is worth noting that accuracy, speed, efficiency, and simplicity are necessary conditions for implementing an MPPT algorithm in photovoltaic systems [26,27], especially when the weather conditions vary. The P&O algorithm is simple but presents more disadvantages, such as weak accuracy and a long transient time of reaching the MPP, which confer poor performance to the strategy. The discrete nonlinear proportional–integral–derivative controller (N-DPID) is a unique controller that has the same simple structure as a linear PID controller. The use of this device for controlling and maintaining the simplicity of the system while addressing the limitations of conventional P&O methods stands as one of the significant contributions of this paper. This combination aims to improve the efficiency, robustness and easiest of implementation of Maximum Power Point Tracking in photovoltaic systems, which has not yet been considered in the literature. One of the difficulties of this method is the parameterization of the gains N-DPID controller to obtain optimal performance [28]. For this purpose, intelligent techniques such as Particle Swarm Optimization (PSO), genetic algorithm (GA), and many others are used. The robustness of the nonlinear PID has been proven in several engineering problems and has shown its effectiveness in tracking the MPP of photovoltaic systems [29]. In this work, a method for improving the performance of the P&O methods of a solar PV system has been proposed, based on the use of an N-DPID controller, so the gains are obtained by an intelligent approach called Particle Swarm Optimization (PSO), which has been designed and simulated in MATLAB/SIMULINK software.
The rest of this paper is planned as follows: Section 2 describes the photovoltaic cells. Section 3 gives a block diagram of the completely controlled PV system and the electrical circuit of the converter considered in the analysis. Section 4 covers the problem formulation. Section 5 presents the simulation and the results of the suggested scheme. Section 6 provides the conclusions.
2. Modeling of the Photovoltaic Cell
The corresponding circuit of the PV cell is illustrated in Figure 1. It is a single-diode model that is simple and efficient. It is generally used for modeling and implementation of strategic controls. This model has a diode and a current source connected antiparallel to the diode [30,31]. A series resistor and a parallel resistor are included in the schematic to account for parasitic effects.
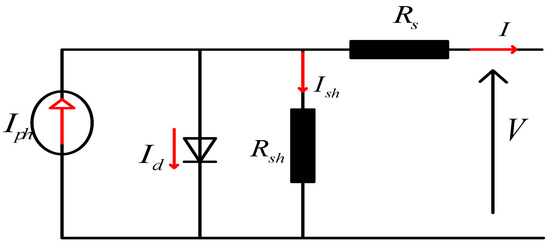
Figure 1.
Equivalent circuit of the single-diode cell.
The following is an expression for the PV cell’s output current:
Respectively, the diode and parallel resistor currents are given by the following relations:
So, the general equation of the output current is given by
The output voltage and current of the PV cell are denoted by I and V, respectively. The reverse saturation current is denoted by , the series resistance by , the parallel resistance by , the thermal voltage by , and n is the constant of the diode.
3. Modeling and Description of the PV System
The system given by the circuit in Figure 2 consists of a PV panel, a DC-DC power boost converter, a load, and an MPPT controller. In this case, the boost converter is controlled by a discrete nonlinear PID controller based on the MPPT control, which receives inputs from the MPPT reference voltage generated by the P&O algorithm and the instantaneous PV voltage .
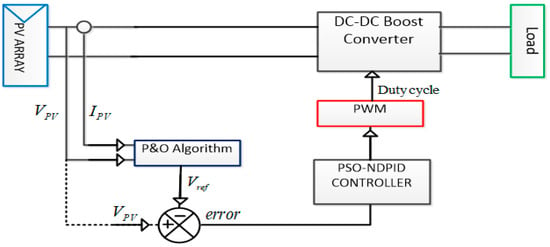
Figure 2.
Block diagram for MPPT with PV.
To ensure the power transfer between the load and photovoltaic generator, we insert between the two blocks a matching stage, also called a converter; in our case, we have chosen a static DC-DC boost converter, allowing a rise in the PV generator’s output voltage. This converter has shown good performance for MPP tracking in photovoltaic systems, and its primary application is to regulate the power supply [32]. Its equivalent circuit is depicted in Figure 3 and includes an inductor (L), a capacitor (C), a power switch MOSFET (Q), a diode D, and the load (R).
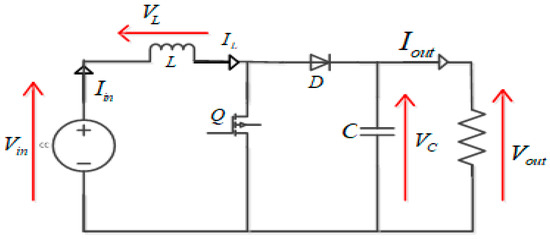
Figure 3.
Equivalent circuit of boost converter.
The following relationships between the i/o voltage and i/o current of the converter are given as
where is the duty cycle of the converter.
4. Problem Formulation
4.1. Perturb and Observe Method
This technique is among the most frequently utilized in the literature [33]. It depends on the photovoltaic generator voltage (), the disturbance of the photovoltaic generator voltage , and the power variation dP; a disturbance can be detected, so a positive disturbance of leads to an increase in power. Otherwise, it will tend to return to the initial disturbance. Since the search process is periodic, the step size variation also keeps the exact nature, which lightly reduces the error. It is important to recall that a very weak step size may cause the MPP to track slowly. The variation of this step leads to oscillations around the MPP, and the MPP cannot be followed efficiently in unstable environmental conditions. The P&O algorithm is given in the flowchart in Figure 4:
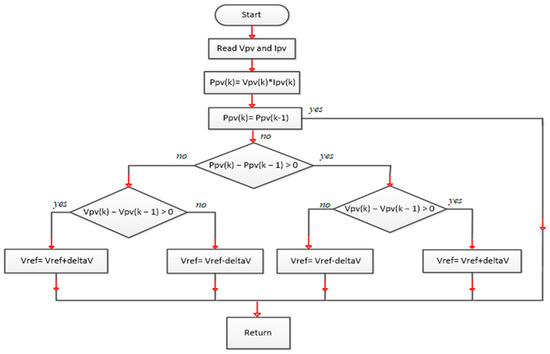
Figure 4.
Flow chart of P&O algorithm [34].
4.2. Nonlinear PID Control Scheme
Significant advancements have been made in the design of nonlinear systems for various practical applications in recent decades. Numerous innovative approaches have emerged, including optimal control, nonlinear feedback control, adaptive control, sliding mode control, nonlinear dynamics, chaos control, chaos synchronization control, fuzzy logic control, fuzzy adaptive control, fractional order control, robust control, and their integrations [35,36].
The nonlinear PID is a modified form of the conventional PID [37]. Azar and Serrano stated that the selection of the nonlinear function depends upon the application’s specific demands [38]. In order to minimize overshoot and oscillations around the MPP, and to reduce substantial errors that contribute to the lowering of system stabilization time, the nonlinear hyperbolic cosine equation has been used [24]. Depending on the error value, the nonlinear PID scheme generates the following control signal:
where is the proportional gain, is integral gain, is derivative gain, and is the nonlinear function.
To set up the control algorithm using numerical tools, the discretization was performed by the forward Euler method [28]. The Laplace transformation applied to Equation (7) allows us to obtain an N-DPID controller presented as follows:
The nonlinear function is given by Equation (9):
where
where and are positive constants and is the sampling period.
4.3. Particle Swarm Optimization
In the control architecture, using fixed gains to control complex and nonlinear dynamical systems leads to large overshoots in the transient state and low robustness. To find the gains of the N-DPID controller to enhance the efficiency of the P&O scheme, the Particle Swarm Optimization (PSO) algorithm was used. This method was proposed by Kennedy and Eberhart in 1995 [39], and it is a metaheuristic approach based on the behavior of animals in swarms. It is an optimization algorithm based on random solutions known as populations that evolve in the problem space in order to find the most optimum solution corresponding to the lowest value of the cost function. Each particle alters its route according to its own best prior position and the best previous position achieved in the entire population, namely, and . At each iteration, the population is updated for , and “n” is the size of the population by the following process:
Equations (11) and (12) represent successively the position and velocity of each particle in the swarm, with being the inertia factor, and the acceleration coefficients, the best position of the particle obtained during the current iteration, and the best position obtained in the whole swarm at the current iteration. and are random numbers uniformly distributed in the interval [0,1]. The flowchart in Figure 5 describes its algorithm.
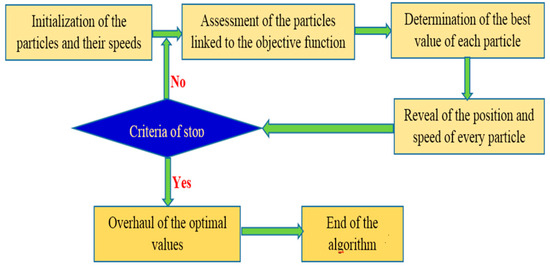
Figure 5.
Flow chart of the PSO algorithm [40].
4.4. Proposed Method: P&O Based on Discrete Nonlinear PSO PID Controller (P&O PSO N-DPID)
A properly tuned discrete nonlinear PID (N-DPID) controller is essential to attaining the system’s intended output response. The PSO algorithm is used in this study to optimally tune the four critical parameters of the N-DPID controller, such as proportional gain (), integral gain (), derivative gain (), and the nonlinear factor (). In this instance, the search space is four dimensions, and a particle represents each potential set of values for the controller parameters, the values of which are changed by minimizing the Integral Absolute Error (IAE) between the reference MPPT voltage () and the actual output (). The optimization process halts once the algorithm reaches a predefined maximum number of iterations, ensuring the N-DPID controller operates at peak efficiency. As an objective function, we use the integral absolute error (IAE) to minimize the error to zero, which is defined by Equation (13):
The algorithm’s iteration stops once it reaches a predefined maximum number. The steps for optimizing the parameters of the N-DPID controller using the PSO algorithm are explained in the flowchart in Figure 6. The flowchart begins with the initialization of particles representing different parameter sets in a four-dimensional space. These particles then iteratively move towards the optimal solution based on their position and velocity updates. The figure highlights critical stages, including the evaluation of the cost function (IAE) and the selection of the best particle position, leading to the optimal tuning of the N-DPID controller parameters. To improve clarity, the figure now includes labels and numerical values at each step to better illustrate the algorithm’s progression.
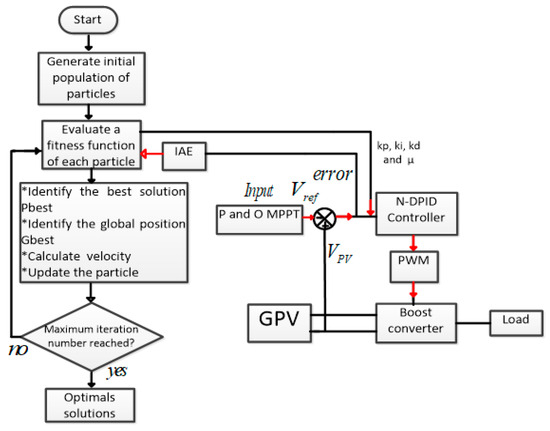
Figure 6.
Flowchart of the proposed P&O PSO N-DPID method.
5. Results
The simulations, achieved using Matlab/Simulink software, demonstrate a significant enhancement in MPPT performance when applying the proposed P&O PSO N-DPID controller compared to conventional methods. Table 1 provides the nomenclature of the standard PV system associated with ERA SOLAR ESPMC-205.

Table 1.
Keys parameters of the PV system.
5.1. Convergence of PSO with DPID and N-DPID
The optimal gains parameters obtained for the different controllers are reported in Table 2.
Table 2.
Optimal controller gains.
Figure 7 and Figure 8 show the convergences of two cost functions of the P&O PSO DPID and P&O PSO N-DPID, respectively. One can observe that the error becomes too small and close to zero from the fiftieth iteration for the DPID controller corresponding to the fiftieth generation with a cost function value of 0.1, compared to the N-DPID controller, which achieves a cost function value of 0.0494 by the forty-third iteration. These annotations clearly illustrate the superior convergence speed and accuracy of the N-DPID controller, respectively. This result highlights the great interest and the importance of the nonlinearity in the discrete PID controllers.
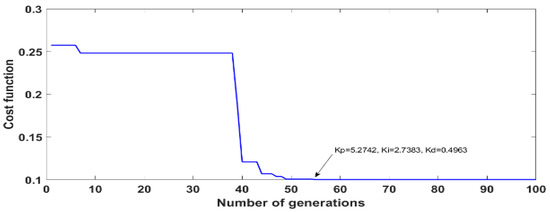
Figure 7.
P&O DPID convergence curve.
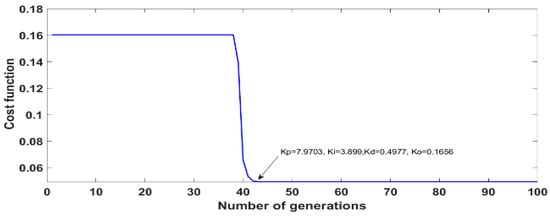
Figure 8.
P&O N-DPID convergence curve.
5.2. Effect of Varying Environmental Conditions on PPM
Figure 9 and Figure 10 show, respectively, the irradiation variation at constant temperature (T = 25 °C) and the temperature variation at constant irradiation (1000 W\m2).
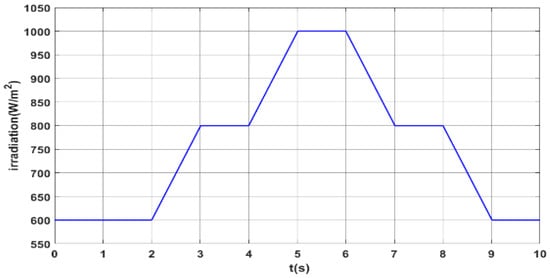
Figure 9.
Irradiation profile.
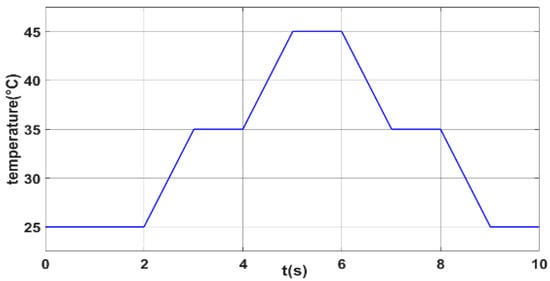
Figure 10.
Temperature profile.
5.2.1. Case of Irradiation
Figure 11a represents, respectively, the increase in the irradiation and, consequently, the MPP of the three methods used and depicts the evolution of power according to irradiation. We can observe that the power curve follows the irradiation curve, which is due to the effect of sunlight on the solar panel’s output current. It may also determine how the nonlinear controller affects the performance of the MPPT P&O algorithm. More specifically, the three sections, A, B, and C, depict the diverse responses of the system when exposed to temperature fluctuation.

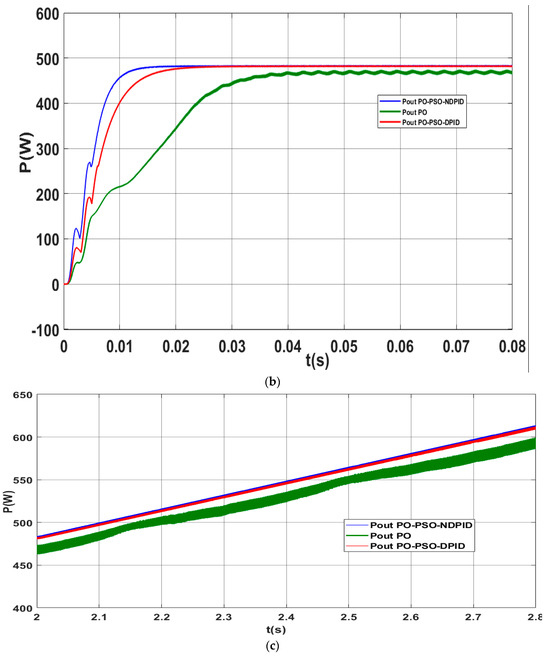
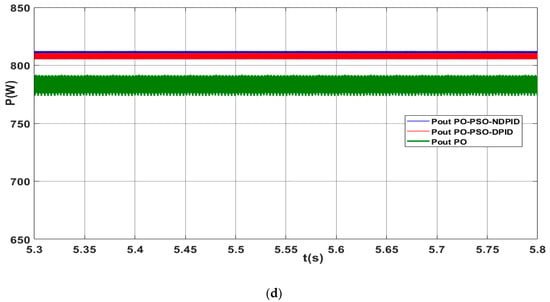
Figure 11.
(a) MPPT development during irradiation variation, (b) MPPT response in A, (c) MPPT response in B, and (d) MPPT response in C.
Figure 11b–d show the time evolution of the MPP in the A, B, and C areas. Figure 11b shows a response time of 0.016 s with the P&O N-DPID controller, compared to 0.04 s with the traditional P&O method, clearly annotating the quantitative improvements achieved by the proposed method. Figure 11c demonstrates better stability with the P&O N-DPID controller than with the traditional P&O method. Figure 11d compares the power output during varying irradiation levels across different methods, where the P&O N-DPID method achieves a steady power output of 820.2 W with minimal fluctuations, in contrast to the significant oscillations observed with the traditional P&O method. It is worth underlining it because, briefly, we can notice the impact and interest of nonlinearity on improving P&O performances. This is shown in the oscillations around the MPP, which are significantly decreased when utilizing the ideal gains. At first look, one could believe there is no significant difference between the P&O PSO DPID and the P&O PSO N-DPID. Still, when we consider the impact of the degradation of oscillations around the MPP on commonly used loads, we notice that the designed method P&O PSO N-DPID allows us to significantly reduce its oscillations, highlighting the efficiency and accuracy of the latter, which is one of our objectives.
5.2.2. Case of the Temperature
Figure 12 shows power development as a function of temperature variation and highlights the importance of the optimal gains for the PID and the efficiency of the designed scheme. Similar behaviors are observed, just like in the previous case. The developed scheme shows a superior convergence speed and a decrease in the oscillations concerning the P&O and the P&O PSO DPID. Given these findings, we may conclude that the suggested strategy considerably enhances the efficacy of the P&O method.
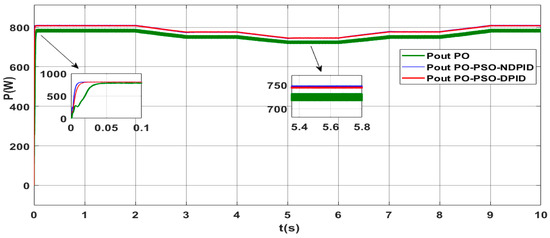
Figure 12.
MPPT response to temperature variation.
5.3. Performance Comparisons with Other Standard Algorithms
The performance of a good search for the maximum power point is characterized by the overshoot, the response time, the ripples around it, and the efficiency. These performances are calculated for an irradiation level of 1000 W/m2. Table 3 shows the performance of the P&O, P&O PSO N-DPID, and P&O PSO DPID MPPT controllers.
Table 3.
Performance of P&O, P&O PSO N-DPID, and P&O PSO DPID.
The N-DPID controller shows more advantages by including a reduced response time of 0.016 s, a ripple magnitude of 0.0071, and an overall efficiency of 99.03%. These quantitative improvements are clearly marked, highlighting the superior performance of the proposed method. It is clearly observed that the proposed method outperforms the P&O and P&O PSO DPID methods. As demonstrated in Table 3, the proposed controller significantly reduces oscillations around the MPP, achieves a faster response time, and improves overall efficiency. These enhancements confirm the effectiveness of the N-DPID controller, particularly in adapting to rapid changes in environmental conditions. The improvements in response time and oscillation reduction are more substantial than those observed with the traditional methods, making the proposed approach highly effective for power transmission.
Table 4 presents a summary of performance comparison between the proposed method and other state-of-the-art techniques in the literature that have been interested in improving the performance of the MPPT P&O controller.
Table 4.
Comparison of the different MPPT techniques.
It can also be seen that the method proposed in this work presents better performances than the methods encountered in the literature, such as the Refs. [17,23,42] and the references therein. It is worth noting that some perform better compared to our strategy, but their response times are still critical. A similar observation is made for the ripple rate and the overshoot [41], which clearly shows that the proposed method presents a compromise between speed, accuracy, and performance.
6. Conclusions
This study introduced a novel approach for MPP tracking based on the improved P&O performance in photovoltaic systems. The main contribution pertains to using a discrete nonlinear intelligent PID controller optimized by a simple and well-known algorithm, the PSO. The results obtained with varying weather conditions based on the PSO N-DPID and P&O PSO DPID show that these strategies are accurate, efficient, fast, and easy to implement. The role and importance of nonlinearity in discrete PID controllers for accuracy and speed in finding the maximum power point are explicitly pointed out. Although the proposed method is a compromise between accuracy, speed, and simplicity, it should be noted that some conditions have not been taken into account in this work, such as partially shaded plates, which remain a problem of concern; other optimization algorithms could be used other than the PSO to compare them to see the best result.
Author Contributions
Conceptualization, M.C.Z.Z., A.S.T.K., M.S.S. and A.T.A.; Formal analysis, M.C.Z.Z., A.S.T.K., M.S.S., A.T.A., S.A. and I.A.H.; Funding acquisition, I.A.H.; Investigation, A.T.A. and S.A.; Methodology, M.C.Z.Z., A.S.T.K., M.S.S., A.T.A., S.A. and I.A.H.; Resources, M.C.Z.Z., A.S.T.K., M.S.S., A.T.A., S.A. and I.A.H.; Software, M.C.Z.Z., A.S.T.K., M.S.S., S.A. and I.A.H.; Validation, A.T.A., S.A. and I.A.H.; Visualization, A.T.A.; Writing—original draft, M.C.Z.Z., A.S.T.K., M.S.S. and A.T.A.; Writing—review & editing, M.C.Z.Z., A.S.T.K., M.S.S., A.T.A., S.A. and I.A.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Norwegian University of Science and Technology, Norway.
Data Availability Statement
Data sharing is not applicable.
Acknowledgments
The authors would like to acknowledge the support of the Norwegian University of Science and Technology for paying the Article Processing Charges (APC) of this publication. This research is supported by Automated Systems and Soft Computing Lab (ASSCL), Prince Sultan University, Riyadh, Saudi Arabia. The authors would like to thank Prince Sultan University, Riyadh, Saudi Arabia for their support.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Abas, N.; Kalair, A.; Khan, N. Review of fossil fuels and future energy technologies. Futures 2015, 69, 31–49. [Google Scholar] [CrossRef]
- Balat, M.M.Y.C. Status of fossil energy resources: A global perspective. Energy Sources B Econ. Plan. Policy 2007, 2, 31–47. [Google Scholar] [CrossRef]
- Mac Kinnon, M.A.; Brouwer, J.; Samuelsen, S. The role of natural gas and its infrastructure in mitigating greenhouse gas emissions, improving regional air quality, and renewable resource integration. Prog. Energy Combust. Sci. 2018, 64, 62–92. [Google Scholar] [CrossRef]
- Nordin, I.; Elofsson, K.; Jansson, T. Cost-effective reductions in greenhouse gas emissions: Reducing fuel consumption or replacing fossil fuels with biofuels. Energy Policy 2024, 190, 114138. [Google Scholar] [CrossRef]
- Wang, J.; Azam, W. Natural resource scarcity, fossil fuel energy consumption, and total greenhouse gas emissions in top emitting countries. Geosci. Front. 2024, 15, 101757. [Google Scholar] [CrossRef]
- Bei, G.; Woon, K.N.; Bill, D. Fuel Cells: Modeling, Control, and Applications; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar] [CrossRef]
- Shahzad, U. The need for renewable energy sources. Energy 2012, 2, 16–18. [Google Scholar]
- Wang, G.; Zhang, Z.; Lin, J. Multi-energy complementary power systems based on solar energy: A review. Renew. Sustain. Energy Rev. 2024, 199, 114464. [Google Scholar] [CrossRef]
- Maka, A.O.M.; Ghalut, T.; Elsaye, E. The pathway towards decarbonisation and net-zero emissions by 2050: The role of solar energy technology. Green Technol. Sustain. 2024, 2, 100107. [Google Scholar] [CrossRef]
- Gholami, H. Technical potential of solar energy in buildings across Norway: Capacity and demand. Sol. Energy 2024, 278, 112758. [Google Scholar] [CrossRef]
- Basantes, B.; Ulloa-Herrera, F.; Pozo, M.; Camacho, O. Power management of an off-grid photovoltaic system using a linear algebra based control. Results Eng. 2024, 23, 102375. [Google Scholar] [CrossRef]
- Najafi Roudbari, F.; Ehsani, H.; Amiri, S.R.; Samadani, A.; Shabani, S.; Khodadad, A. Advances in photovoltaic thermal systems: A comprehensive review of CPVT and PVT technologies. Sol. Energy Mater. Sol. Cells 2024, 276, 113070. [Google Scholar] [CrossRef]
- Ali, M.N. Improved design of artificial neural network for MPPT of grid-connected PV systems. In Proceedings of the 2018 Twentieth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 18–20 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 97–102. [Google Scholar] [CrossRef]
- Sharma, R.S.; Katti, P.K. Perturb & observation MPPT algorithm for solar photovoltaic system. In Proceedings of the 2017 International Conference on Circuit, Power and Computing Technologies (ICCPCT), Kollam, India, 20–21 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Kamal, N.A.; Ibrahim, A.M. Conventional, Intelligent, and Fractional-Order Control Method for Maximum Power Point Tracking of a Photovoltaic System: A Review. In Fractional Order Systems Optimization, Control, Circuit Realizations and Applications, Advances in Nonlinear Dynamics and Chaos (ANDC); Academic Press: Cambridge, MA, USA, 2018; pp. 603–671. [Google Scholar]
- Elobaid, L.M.; Abdelsalam, A.K.; Zakzouk, E.E. Artificial neural network based maximum power point tracking technique for PV systems. In Proceedings of the IECON 2012-38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 937–942. [Google Scholar] [CrossRef]
- Jordehi, A.R. Maximum power point tracking in photovoltaic (PV) systems: A review of different approaches. Renew. Sustain. Energy Rev. 2016, 65, 1127–1138. [Google Scholar] [CrossRef]
- Yin, M.; Qin, L.; Wu, G.; Shi, C. An improved variable step size photovoltaic MPPT algorithm based on perturb and observe method. In Proceedings of the Third International Conference on Electronics and Communication, Network and Computer Technology (ECNCT 2021), Coimbra, Portugal, 6–9 September 2016; SPIE: Washington, DC, USA, 2022; Volume 12167, pp. 729–734. [Google Scholar] [CrossRef]
- Joshi, P.; Arora, S. Maximum power point tracking methodologies for solar PV systems—A review. Renew. Sustain. Energy Rev. 2017, 70, 1154–1177. [Google Scholar] [CrossRef]
- Dhaouadi, G.; Djamel, O.; Youcef, S.; Salah, C. Implementation of incremental conductance based MPPT algorithm for photo-voltaic system. In Proceedings of the 2019 4th International Conference on Power Electronics and their Applications (ICPEA), Elazig, Turkey, 25–27 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Jiang, M.; Ghahremani, M.; Dadfar, S.; Chi, H.; Abdallah, Y.N.; Furukawa, N. A novel combinatorial hybrid SFL-PS algorithm based neural network with perturb and observe for the MPPT controller of a hybrid PV-storage system. Control Eng. Pract. 2021, 114, 104880. [Google Scholar] [CrossRef]
- Blange, R.; Mahanta, C.; Gogoi, A.K. MPPT of solar photovoltaic cell using perturb & observe and fuzzy logic controller algorithm for buck-boost dc-dc converter. In Proceedings of the 2015 International Conference on Energy, Power and Environment: Towards Sustainable Growth (ICEPE), Shillong, India, 12–13 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Zainuri, M.A.A.M.; Radzi, M.A.M.; Che Soh, A.; Rahim, N.A. Development of adaptive perturb and observe-fuzzy control maximum power point tracking for photovoltaic boost dc–dc converter. IET Renew. Power Gener. 2014, 8, 183–194. [Google Scholar] [CrossRef]
- Kler, D.; Rana, K.; Kumar, V. A nonlinear PID controller based novel maximum power point tracker for PV systems. J. Frankl. Inst. 2018, 355, 7827–7864. [Google Scholar] [CrossRef]
- Manna, S.; Singh, D.K.; Akella, A.K.; Kotb, H.; AboRas, K.M.; Zawbaa, H.M.; Kamel, S. Design and implementation of a new adaptive MPPT controller for solar PV systems. Energy Rep. 2023, 9, 1818–1829. [Google Scholar] [CrossRef]
- Águila-León, J.; Vargas-Salgado, C.; Díaz-Bello, D.; Montagud-Montalvá, C. Optimizing photovoltaic systems: A meta-optimization approach with GWO-enhanced PSO algorithm for improving MPPT controllers. Renew. Energy 2024, 230, 120892. [Google Scholar] [CrossRef]
- Ben Regaya, C.; Hamdi, H.; Farhani, F.; Marai, A.; Zaafouri, A.; Chaari, A. Real-time implementation of a novel MPPT control based on the improved PSO algorithm using an adaptive factor selection strategy for photovoltaic systems. ISA Trans. 2024, 146, 496–510. [Google Scholar] [CrossRef]
- Pathak, D.; Sagar, G.; Gaur, P. An application of intelligent non-linear discrete PID controller for MPPT of PV system. Procedia Comput. Sci. 2020, 167, 1574–1583. [Google Scholar] [CrossRef]
- Su, Y.; Sun, D.; Duan, B. Design of an enhanced nonlinear PID controller. Mechatronics 2005, 15, 1005–1024. [Google Scholar] [CrossRef]
- Mengue, F.D.; Kammogne, A.S.T.; Siewe, M.S.; Yamapi, R.; Fotsin, H.B. A new hybrid method based on differential evolution to determine the temperature-dependent parameters of single-diode photovoltaic cells. J. Comput. Electron. 2021, 20, 2511–2521. [Google Scholar] [CrossRef]
- Pelap, F.; Dongo, P.; Kapim, A. Optimization of the characteristics of the PV cells using nonlinear electronic components. Sustain. Energy Technol. Assess. 2016, 16, 84–92. [Google Scholar] [CrossRef]
- Nguimfack, N.J.d.D.; Kenne, G.; Kuate-Fochie, R.; Tchouani Njomo, A.F.; Mbaka Nfah, E. Adaptive neuro-synergetic control technique for sepic converter in pv systems. Int. J. Dyn. Control. 2022, 10, 203–216. [Google Scholar] [CrossRef]
- Anto, E.K.; Asumadu, J.A.; Okyere, P.Y. PID control for improving P&O-MPPT performance of a grid-connected solar PV system with ziegler-nichols tuning method. In Proceedings of the 2016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1847–1852. [Google Scholar] [CrossRef]
- Harrison, A.; Ndongmo, J.D.D.N.; Nfah, E.M.; Ekute, O.B. Improved Perturb & Observe MPPT method using PI controller for PV system based on real environmental and climatic conditions. Open Access Repos. 2022, 9, 28–38. [Google Scholar] [CrossRef]
- Delavari, H.; Ghaderi, R.; Ranjbar, A.; Momani, S. Fuzzy fractional order sliding mode controller for nonlinear systems. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 963–978. [Google Scholar] [CrossRef]
- Rafikov, M.; Balthazar, J.M. On control and synchronization in chaotic and hyperchaotic systems via linear feedback control. Commun. Nonlinear Sci. Numer. Simul. 2008, 13, 1246–1255. [Google Scholar] [CrossRef]
- Moreno-Valenzuela, J.; Pérez-Alcocer, R.; Guerrero-Medina, M.; Dzul, A. Nonlinear PID-type controller for quadrotor trajectory tracking. IEEE/ASME Trans. Mechatron. 2018, 23, 2436–2447. [Google Scholar] [CrossRef]
- Azar, A.T.; Serrano, F.E. Stabilization and Control of Mechanical Systems with Backlash. In Advanced Intelligent Control Engineering and Automation, Advances in Computational Intelligence and Robotics (ACIR) Book Series; IGI-Global: Hershey, PA, USA, 2015. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Wu, T.-Y.; Jiang, Y.-Z.; Su, Y.-Z.; Yeh, W.-C. Using simplified swarm optimization on multiloop fuzzy pid controller tuning design for flow and temperature control system. Appl. Sci. 2020, 10, 8472. [Google Scholar] [CrossRef]
- De Brito, M.A.G.; Galotto, L.; Sampaio, L.P.; e Melo, G.d.A.; Canesin, C.A. Evaluation of the main MPPT techniques for photovoltaic applications. IEEE Trans. Ind. Electron. 2012, 60, 1156–1167. [Google Scholar] [CrossRef]
- Bouselham, L.; Hajji, M.; Hajji, B.; Bouali, H. A new MPPT-based for photovoltaic system under partial shading conditions. Energy Procedia 2017, 111, 924–933. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).