Power Testing of Aspheric Lenses Based on Transmission Phase Deflectometric Method



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
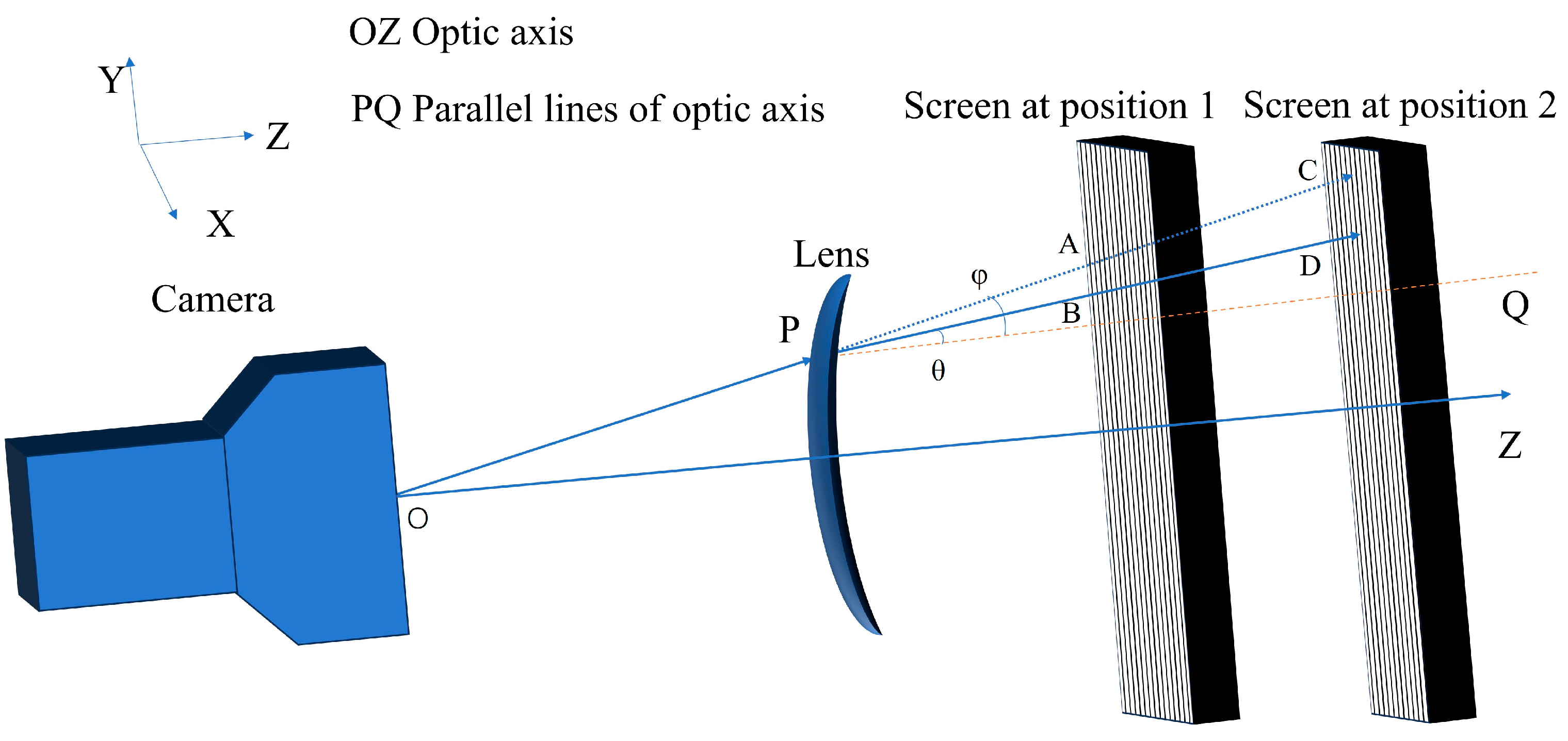
2.1. Principle of Transmission Phase Deflection
2.2. System Calibration and Phase Information Extraction
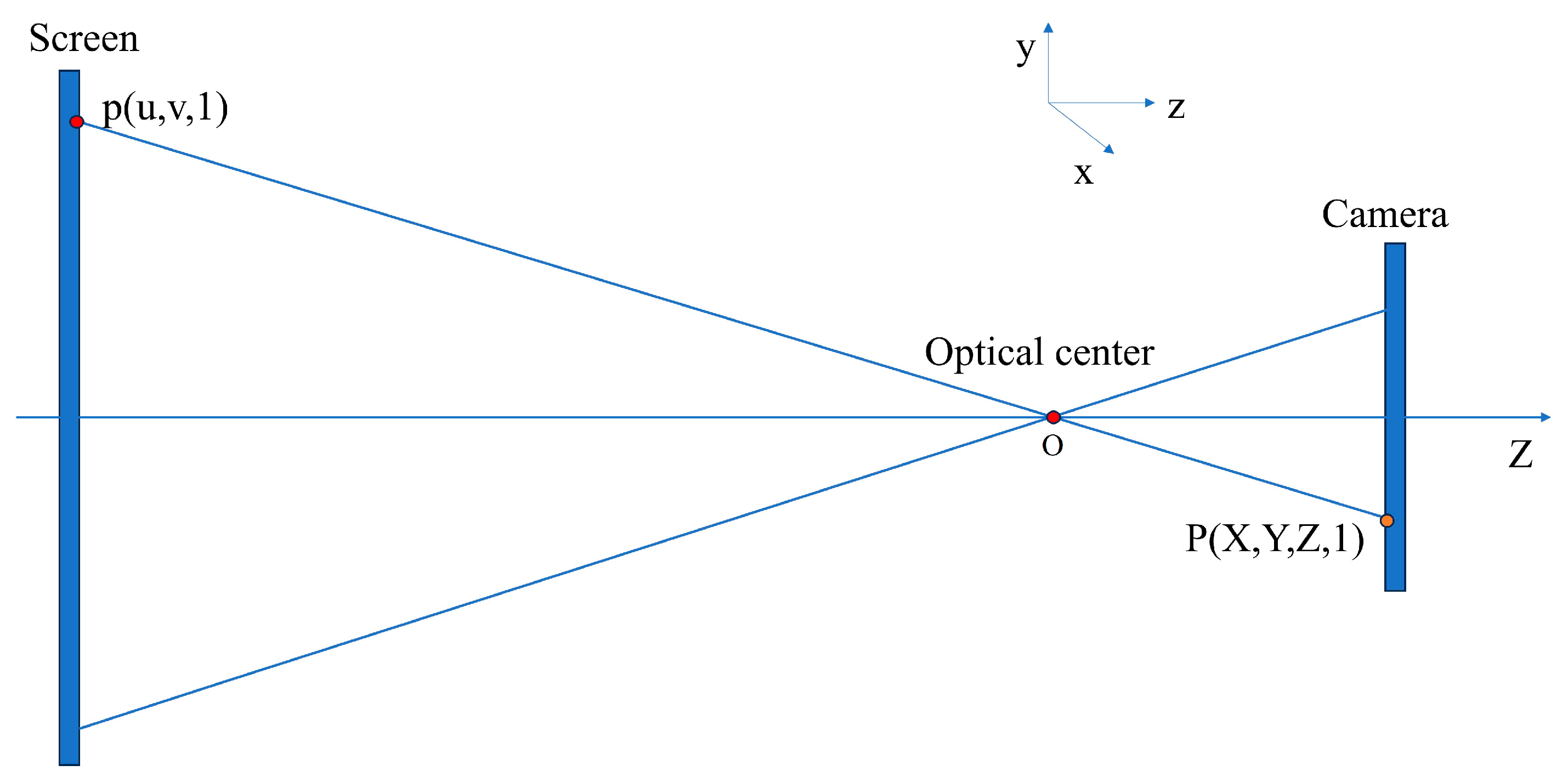
2.2.1. External Parameter Calibration
2.2.2. Phase Information Extraction
2.3. Transmission Wavefront Fitting and Related Parameter Solving
2.3.1. Transmission Wavefront Fitting
2.3.2. Mathematical Modeling of Power
3. Results
3.1. Experimental Verification
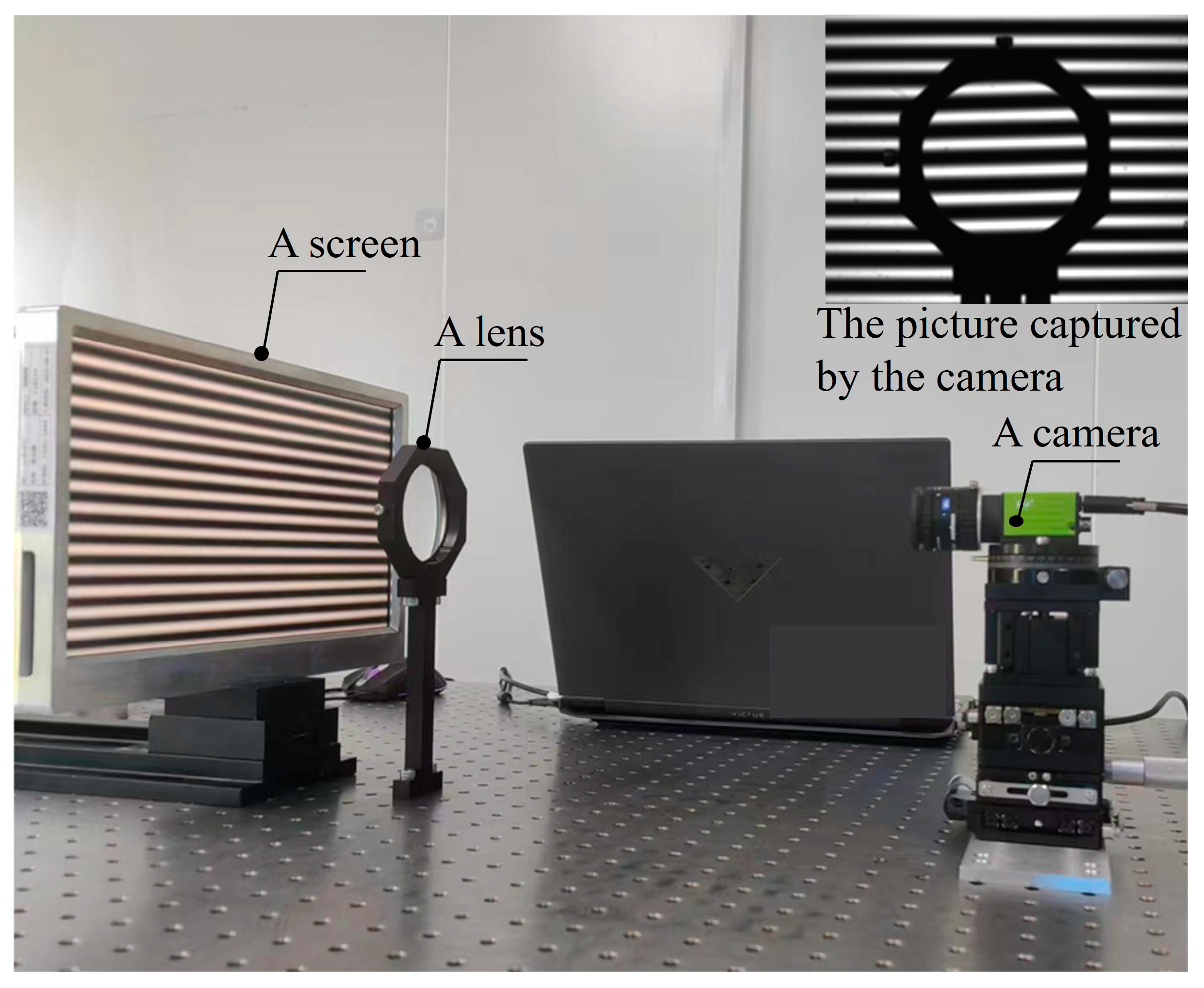
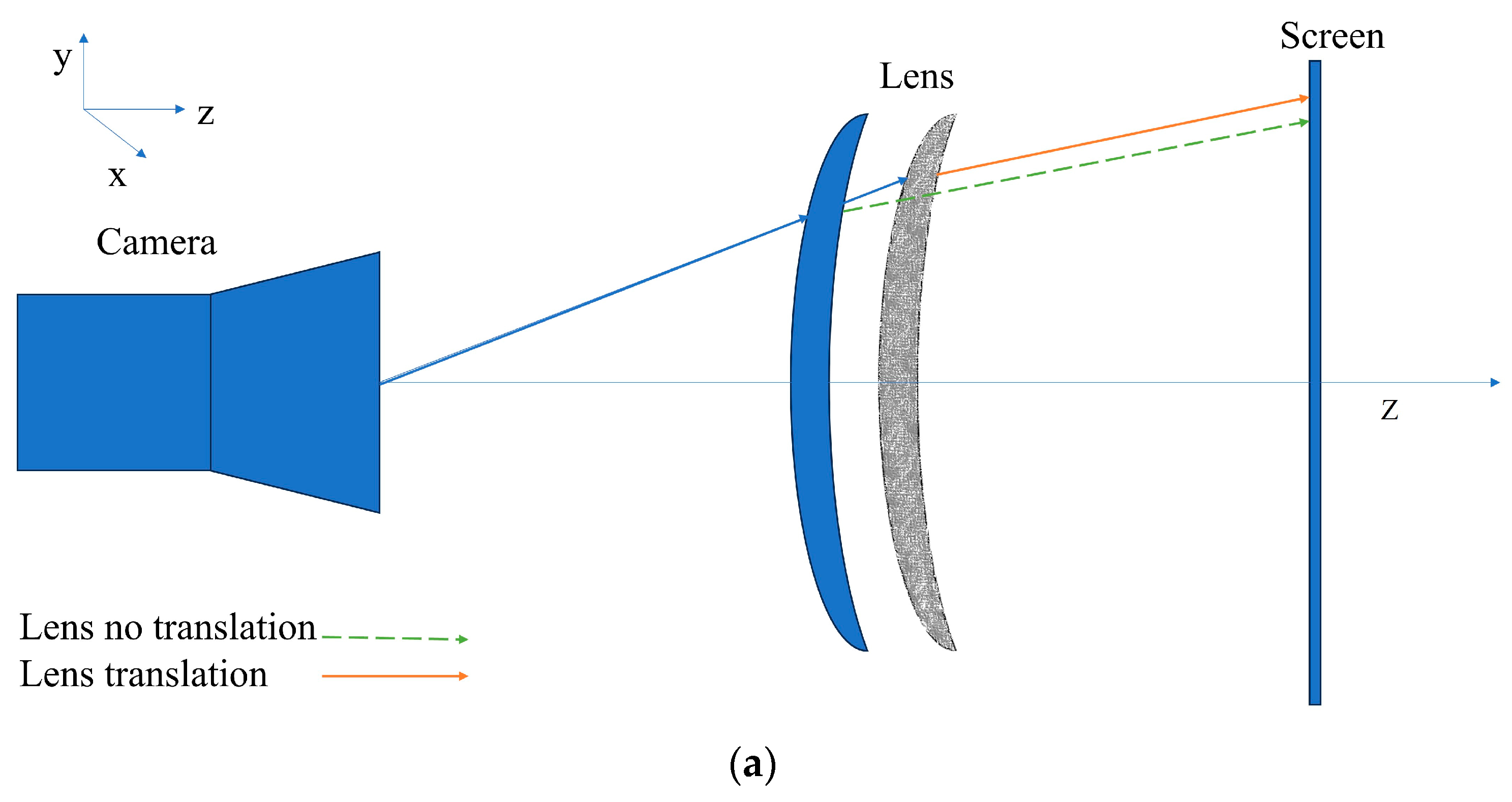
3.1.1. Experimental Setup
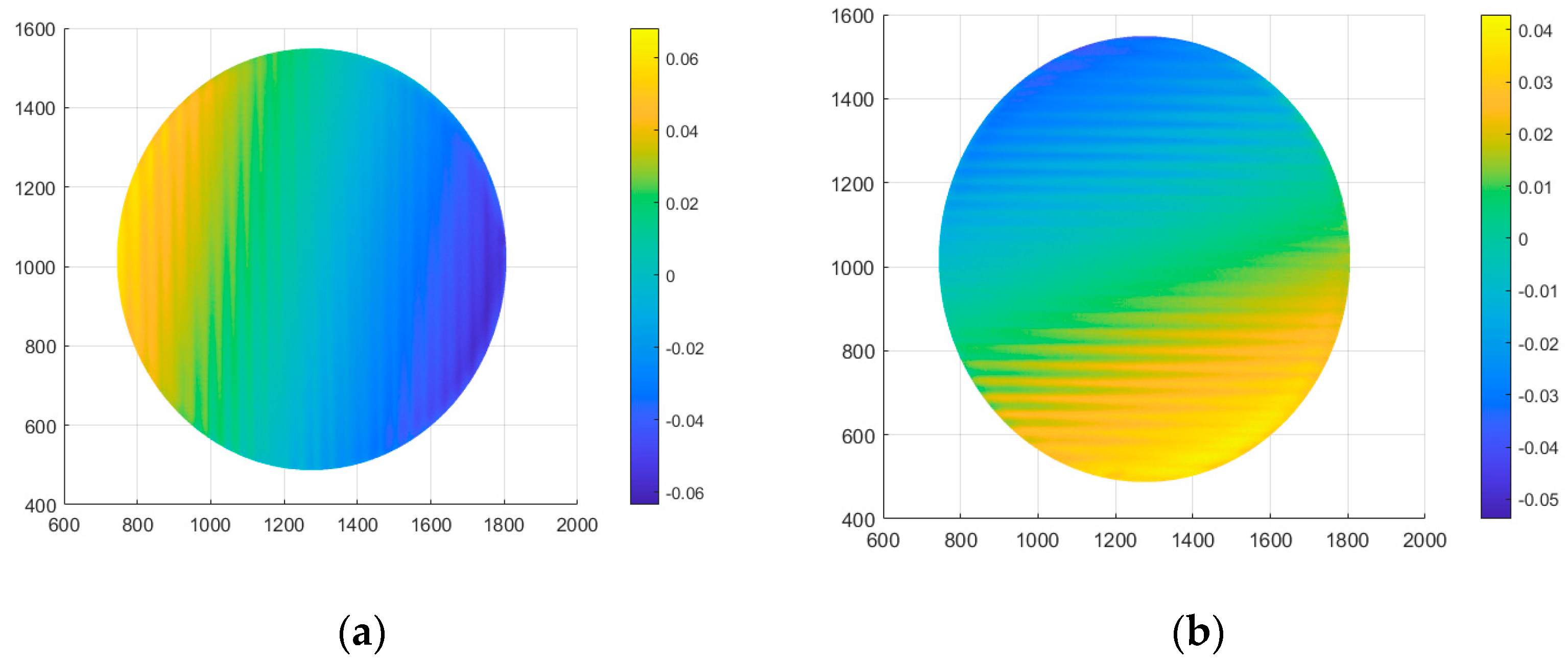
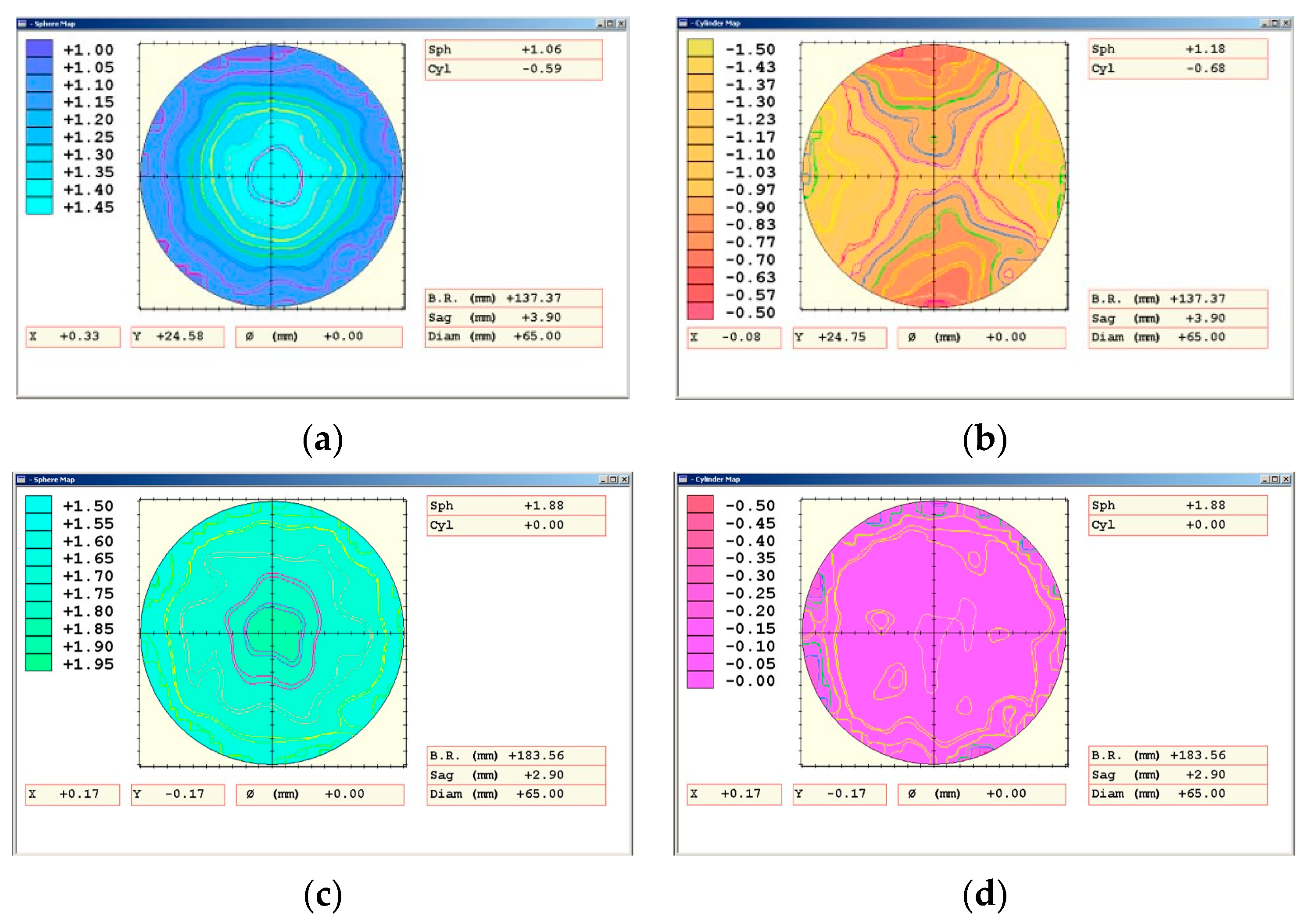
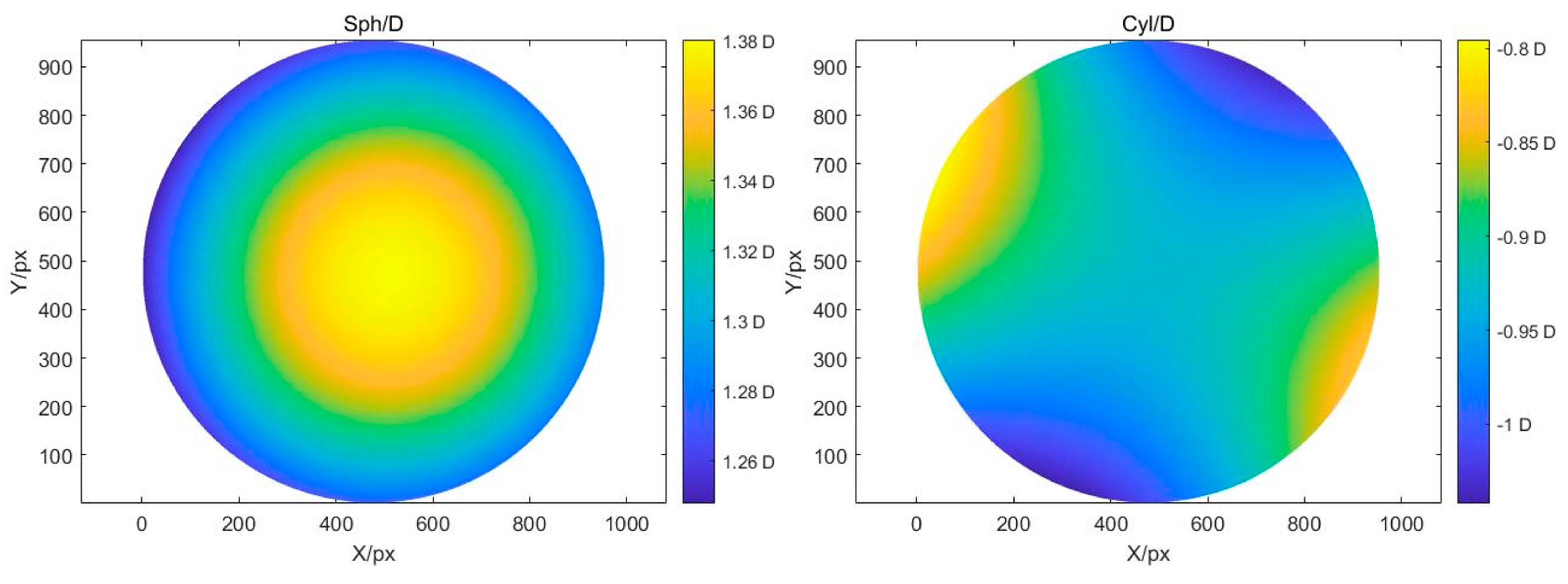
3.1.2. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Park, J.; Chen, L.; Wang, Q.; Griesmann, U. Modified Roberts-Langenbeck test for measuring thickness and refractive index variation of silicon wafers. Opt. Express 2012, 20, 20078–20089. [Google Scholar] [CrossRef] [PubMed]
- Mohtashami, V.; Shishegar, A.A. Modified wavefront decomposition method for fast and accurate ray-tracing simulation. IET Microw. IET Microw. Antennas Propag. 2012, 6, 295–304. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhou, L.; Chen, W. Wavefront control through multi-layer scattering media using single-pixel detector for high-PSNR optical transmission. Opt. Lasers Eng. 2021, 139, 106453. [Google Scholar] [CrossRef]
- He, H.; Wong, K.S. An improved wavefront determination method based on phase conjugation for imaging through thin scattering medium. J. Opt. 2016, 18, 085604. [Google Scholar] [CrossRef]
- Kim, S.; Jeon, J.; Kim, Y.; Sugita, N.; Mitsuishi, M. Design and Assessment of Phase-Shifting Algorithms in Optical Interferometer. Int. J. Precis. Eng. Manuf. Green Technol. 2023, 10, 611–634. [Google Scholar] [CrossRef]
- Brooks, A.F.; Kelly, T.-L.; Veitch, P.J.; Munch, J. Ultra-sensitive wavefront measurement using a Hartmann sensor. Opt. Express 2007, 15, 10370–10375. [Google Scholar] [CrossRef] [PubMed]
- Canabal, H.C. Automatic wavefront measurement technique using a computer display and a charge-coupled device camera. Opt. Eng. 2002, 41, 822–826. [Google Scholar] [CrossRef]
- Vargas, J.; Gómez-Pedrero, J.A.; Alonso, J.; Quiroga, J.A. Deflectometric method for the measurement of user power for ophthalmic lenses. Opt. Dep. 2010, 17, 5125–5132. [Google Scholar] [CrossRef]
- Markus, C.K.; Jurgen, K.; Gerd, H. Phase measuring deflectometry: A new approach to measure specular free-form surfaces. Proc. SPIE 2004, 5457, 366–376. [Google Scholar]
- Lanen, T.A.W.M.; Bakker, P.G.; Bryanston-Cross, P.J. Digital holographic interferometry in high-speed flow research. Exp. Fluids 1992, 13, 56–62. [Google Scholar] [CrossRef]
- Wang, Q.; Yu, J.; Chen, H. Measurement of lenses’ power based on moire deflection technology. In Proceedings of the 3rd International Symposium on Advanced Optical Manufacturing and Testing Technologies: Optical Test and Measurement Technology and Equipment, Chengdu, China, 8–12 July 2007; Volume 6723, pp. 118–123. [Google Scholar]
- Arasa, J.; Royo, S.; Tomàs, N. Simple method for improving the sampling in profile measurements by use of the Ronchi test. Appl. Opt. 2000, 39, 4529–4534. [Google Scholar] [CrossRef] [PubMed]
- Ichihara, Y. Evolution of Wavefront Metrology Enabling Development of High-Resolution Optical Systems. Opt. Rev. 2014, 21, 833–838. [Google Scholar] [CrossRef]
- Chang, G. Surfing the metasurface: A conversation with Din Ping Tsai. Adv. Photonics 2023, 5, 060502. [Google Scholar] [CrossRef]
- Abdel-Aziz, Y.; Karara, H. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry. Photogramm. Eng. Remote Sens. 2015, 81, 103–107. [Google Scholar] [CrossRef]
- Pepe, A.; Manunta, M.; Mazzarella, G.; Lanari, R. A Space-Time Minimum Cost Flow Phase Unwrapping Algorithm for the Generation of Persistent Scatterers Deformation Time-Series. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 5285–5288. [Google Scholar]
- Flores, J.L.; Bravo-Medina, B.; Ferrari, J.A. One-frame two-dimensional deflectometry for phase retrieval by addition of orthogonal fringe patterns. Appl. Opt. 2013, 52, 6537–6542. [Google Scholar] [CrossRef] [PubMed]
- Harris, W.F. Calculation and least-squares estimation of surface curvature and dioptric power from meridional measurements. Ophthalmic Physiol. Opt. 1992, 12, 58–64. [Google Scholar] [PubMed]
- Wang, D.; Xu, P.; Wu, Z.; Fu, X.; Wu, R.; Kong, M.; Liang, J.; Zhang, B.; Liang, R. Simultaneous multisurface measurement of freeform refractive optics based on computer-aided deflectometry. Optica 2020, 7, 1056–1064. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Wang, X.; Zhang, S.; Li, W.; Zhao, Y.; Zhou, C.; Xue, D.; Zhang, X. Power Testing of Aspheric Lenses Based on Transmission Phase Deflectometric Method. Photonics 2024, 11, 756. https://doi.org/10.3390/photonics11080756
Wu Q, Wang X, Zhang S, Li W, Zhao Y, Zhou C, Xue D, Zhang X. Power Testing of Aspheric Lenses Based on Transmission Phase Deflectometric Method. Photonics. 2024; 11(8):756. https://doi.org/10.3390/photonics11080756
Chicago/Turabian StyleWu, Qiong, Xiaokun Wang, Shuangshuang Zhang, Wenhan Li, Yingjing Zhao, Chengchen Zhou, Donglin Xue, and Xuejun Zhang. 2024. "Power Testing of Aspheric Lenses Based on Transmission Phase Deflectometric Method" Photonics 11, no. 8: 756. https://doi.org/10.3390/photonics11080756
APA StyleWu, Q., Wang, X., Zhang, S., Li, W., Zhao, Y., Zhou, C., Xue, D., & Zhang, X. (2024). Power Testing of Aspheric Lenses Based on Transmission Phase Deflectometric Method. Photonics, 11(8), 756. https://doi.org/10.3390/photonics11080756