1. Introduction
Grating interferometers have the advantage of being insensitive to the air refractive index, attracting significant attention in precise displacement measurements, especially for multiple degree-of-freedom (DOF) measurements. Two-DOF grating interferometers that measure in-plane and out-of-plane displacements are used as basic units of six-DOF measurement systems for various stages in photolithography machines [
1,
2]. Therefore, research on two-DOF grating interferometers has increased in recent years [
3,
4,
5]. Beside resolution and accuracy, periodic nonlinear errors, misalignment tolerance, and size of reading heads are crucial in two- and multiple-DOF applications.
There are two main approaches to the addition of out-of-plane displacement measurements to a grating interferometer, as we mentioned in a previous review [
6] and these include building a laser interferometer or decoupling its phase from interference signals. For the former, taking Hsieh’s interferometer [
7] as an example, zeroth-order diffracted beams are used as measurement beams for the laser interferometer. However, the reflected zeroth-order beam is sensitive to the roll and yaw angles of the planar grating, leading to a misalignment angle as large as twice the rotated angles. In addition, the configurations of laser and grating interferometers are difficult to miniaturize. For the latter, taking Li’s interferometer [
8] as an example, the in- and out-of-plane displacements are decoupled from phases of measurement beams. Thus, out-of-plane motion measurements share the same misalignment tolerance as the in-plane measurements.
In our previous work on spatially separated heterodyne grating interferometers, the spatially separated structure is proven to eliminate the periodic nonlinear errors caused by optical mixing, removing a barrier to nanometer-scale measuring accuracy [
9,
10]. In addition, the double-diffracted configuration is involved in increasing the resolution and improving the misalignment tolerances to the scale of several mrad [
10,
11]. The double-diffraction configuration also leads to a more complicated optical configuration. However, the laser wavelength for out-of-plane motion measurements is sensitive to the fluctuations of the air refractive index. To achieve high accuracy of the complicated grating interferometer, the length of the beam path should be as short as possible. Therefore, the miniature design of the optical configuration is crucial for in- and out-of-plane grating interferometers and is an important technical issue in the field.
Small optical components will limit the beam diameter, leading to a small misalignment tolerance. Thus, to maintain large misalignment tolerance in a miniatured optical configuration, we proposed a spatially separated heterodyne grating interferometer that measures in-plane and out-of-plane displacements with 3 mm diameter beams with a size of 69 mm × 51 mm × 41 mm. The proposed grating interferometer uses a monolithic prism for compact design, which is advantageous due to its small size and good stability. The experimental results show the periodic nonlinear errors are less than 0.25 nm; the measuring accuracies of in-plane and out-of-plane are higher than 5 nm; the misalignment tolerances are larger than ±2 mrad.
2. Optical Structure and Measuring Principle
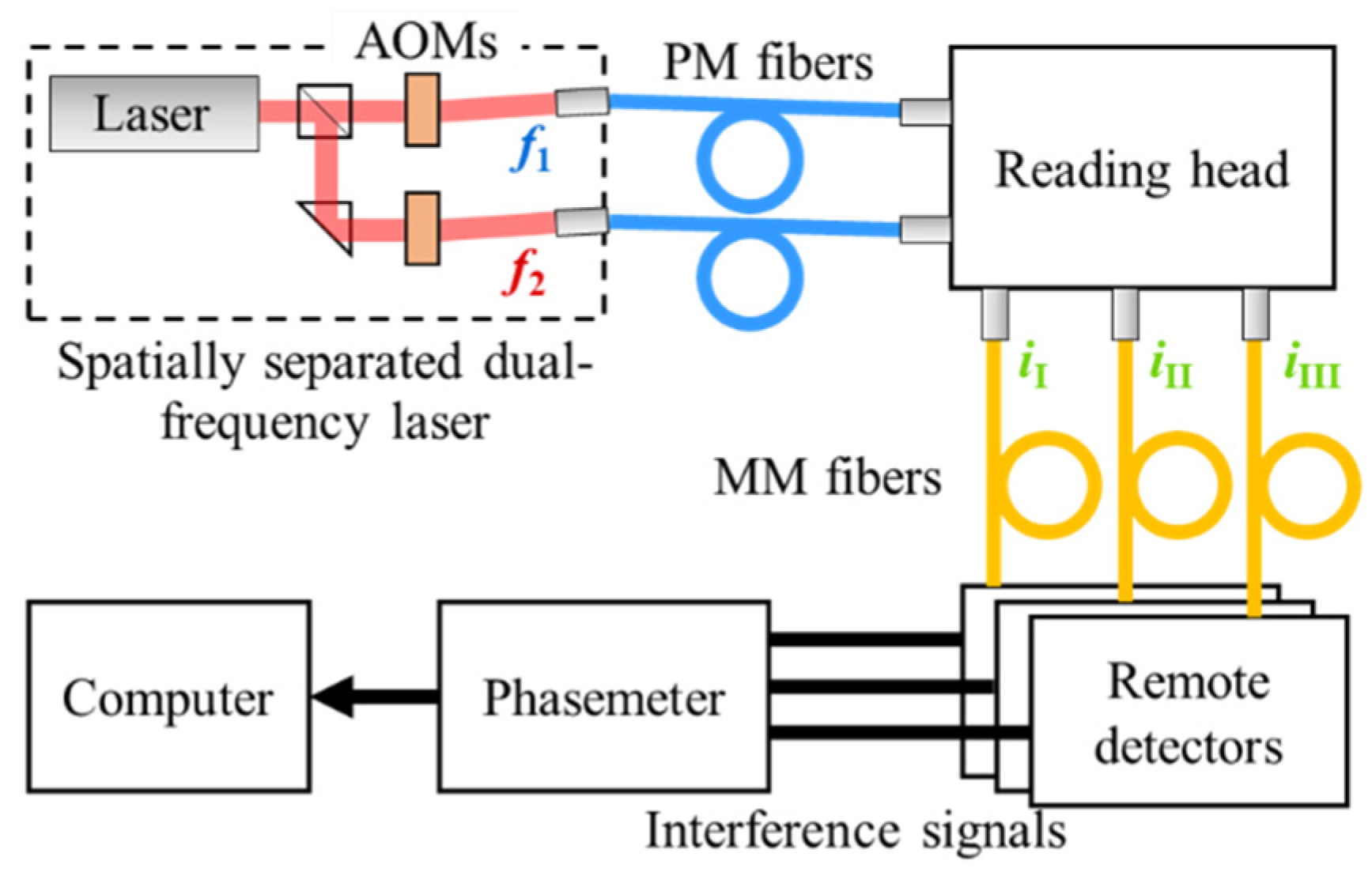
The schematic of the proposed spatially separated heterodyne grating interferometer is shown in
Figure 1. A stabilized laser source with two acoustic-optical modulators is used as a spatially separated dual-frequency laser. Two laser beams, the frequencies of which are denoted as
f1 and
f2, are transmitted to the reading head via individual polarization-maintaining optical fibers. Then, three interference beams generated at the reading head are transmitted to remote detectors. A phasemeter is used for decoupling and calculating the displacements from the phases of interference signals.
Schematics of the optical configuration of the reading head that illustrate the principle and structure are shown in
Figure 2. As
Figure 2a shows, the optical configuration is composed of a center beam splitter (CBS), a lateral displacement beam splitter (LDBS), and three retro-reflectors (RRs) for one reference beam and two measurement beams.
The CBS contains two beam-splitting surfaces—a polarized one that lies on the diagonal surface of the cube and a non-polarized one that is located on the middle-line surface of the lower triangular prism. The split and combination of these beams are carried out in the CBS with the help of the retro-reflector RR
0, which substitutes the 45° angle-placed beam-combining beam splitters in the previous work [
10,
11].
As depicted in
Figure 2a, two modulated beams with frequencies
f1 and
f2 (assuming
f1 >
f2) emitted from two fiber collimators (not shown) enter the CBS and are split into two parts at the polarized splitting surface, respectively. The reflected s-polarized beams are transferred to the RR
0 and are reflected. We ignored the initial phase and assumed that the wave equations of these beams are as follows:
where
t is time.
As the name indicates, there are two diffraction steps that occur in the double-diffraction optical configuration. The transmitted p-polarized beams of CBS transfer to the grating interferometer and diffract (the first-step diffractions). The incident angles of the first diffractions are 90 degrees. The diffracted beams, +1st-order of
f1 beam and −1st-order of
f2 beam, are returned by the corresponding retro-reflectors RR
1 and RR
2, and then the second step of diffractions occur. A pair of the diffracted beams of the second diffractions, (+1,+1)-order of the
f1 beam and (−1,−1)-order of the
f2 beam, are in parallel with the incident beams of the first diffractions, but are transmitted away from the grating. Except for the aforementioned diffracted beams, other orders of diffracted beams are not involved in the measurement. Considering the optical Doppler frequency shifts caused by in-plane motion of the grating and the changes in optical paths caused by out-of-plane motion, the second diffracted beams are expressed as
In Equations (3) and (4), the factor 2 before Δ
fx is induced by the double-diffracted configuration, which means a doubled optical fold factor. The factor
k is determined by the geometric scheme of the incident and diffracted beams, which will be further discussed in the following sections. The Doppler frequency shifts Δ
fx and Δ
fz are determined by the moving velocity
vx and
vz, and the corresponding benchmarks—the pitch
d of the grating and the wavelength
λ of the laser.
Then, the returned s-polarized beams and the second diffracted p-polarized beams combine at the polarized splitting surface of the CBS. Because the output beams and the input beams are centrally symmetric, the two combined interfering beams can be calculated by adding
E1 and
E4,
E2 and
E3, respectively. Thus, the alternating intensities detected by photodiodes are expressed as
Although the intensities in Equations (7) and (8) include the phases caused by in- and out-of-plane motions, only the out-of-plane displacement along the z-axis could be calculated because there are three variables with two functions. Therefore, a third signal generated by the non-polarized beam-splitting surface in the CBS is needed for measuring x-axis displacement.
As shown in
Figure 2a, the second diffracted beams are split into the following two parts: the transmitted part analyzed above, and the reflected part combined with an LDBS. Then, we obtain the expression for the third interfering beam, which is as follows:
Assuming the phases of the signals
i1 through
i3 are
φ1,
φ2, and
φ3, and by substituting the phases in beat frequency and Doppler frequency shift with
φbeat,
φx and
φz, shown by
a set of linear equations with three variables can be obtained to calculate the displacements.
The equations can be solved after using a phasemeter to acquire three phases
φ1,
φ2, and
φ3, and the displacements
x and
z are converted as follows:
As
Figure 2b shows, the structure of the reading head is carefully designed. The beam paths are arranged in a three-dimensional configuration to reduce the size of the reading head. The retro-reflectors RR
0 and LDBS are directly attached to the CBS by optical adhesive, forming a monolithic beam-splitter prism. The monolithic design is advantageous for short beam paths in the air, which leads to better stability. RR
1 and RR
2 are independent of the monolithic prism, which is helpful when assembling and adjusting the reflectors.
The
z-axis displacement measurement factor can be further calculated from the structure. Taking one part of the beams as an example, when the grating occurs along the
z-direction as
Figure 3 shows, the optical path extends and the spots on the surface of RR deviate. The red dashed lines represent the extended path. Since the output of the RR is centrally symmetric, the two green-shaded triangles in the projection view are congruent, which means that the total extension
l in the first and second diffracted beams are equal to the equation
where the diffracted angle
θ is determined by the grating equation. In addition to the exact value of the factor
k, Equation (14) also proves that the double-diffracted configuration doubles the fold factor of measuring displacements in both
x- and
z-directions.
4. Discussion
Tips and tilts always exist in actual translational motion. With regard to grating interferometers, the roll, pitch, and yaw angles conventional represent the rotation around the
x-,
y-, and
z-axis. Those three angles are shown in
Figure 16.
For grating interferometers, tips and tilts on a μrad to mrad scale are influencing by two aspects, misalignments and extra phases. The misalignments will cause a decrease in the signal-to-noise ratio, resulting in an increase in random errors. This could be solved by designing an optical configuration with high misalignment tolerances, similar to the configuration we introduced in the above sections. The extra phases are caused by changes in the length of optical paths.
When the grating rotates, the phases of
x- and
z-axis displacements from different beams could be distinguished as
φx1 and
φx2,
φz1 and
φz2, respectively. Similar to the derivation in
Section 2, we can now obtain the phase functions with rotation.
Using the same solutions from Equation (11) to Equations (12) and (13), the following expressions can be obtained:
Equation (17) shows that the displacement results are the average of two beams with crosstalk errors. The phases
φx1 and
φx2 are the results of the cosine error of the grating. According to the schematic in
Figure 15, the cosine error is calculated as
where Δx
1 and Δx
2 represent the corresponding displacement of the grating. In
Figure 17, the values of Δx
1 and Δx
2 are the same, but their signs are opposite to one another. For the prototype, the space of the incident beams
S is 7.5 mm, the maximum value of the angle
θ is 2 mrad, and the x-axis additional phase is calculated as 0.03π. According to Equation (17), the additional phase of 0.03π will cause an error of 11.7 nm.
The phases
φz1 and
φz2 in Equation (17) are caused by the change in the beam path. In previous work, the three rotation angles, roll, pitch, and yaw, were analyzed separately. In this work [
11], we established a simulation model for the optical configuration based on vectorial ray tracing by the open-source software Octave. By using the model, optical paths are illustrated and measured. The results are shown in
Figure 18.
Figure 18a shows the ray tracing result of the optical configuration.
As a result of the rotation of the grating, the optical paths are changed, as the dashed line shows. Further investigation based on the simulation model reveals that because of the symmetry of the optical configuration, the pitch angle has a significant effect on the beam path. Curves of the length changes in the optical paths in three interference beams are shown in
Figure 18b. Extra phases and errors could be further calculated by the length changes. The curves in
Figure 18b are similar to straight lines. Using the slope values
bi to fit the curves, the residual errors are less than 0.2 nm. Therefore, the effect caused by pitch angles could be compensated for by linear fitting. Complicated situations with decoupling rotations could be further analyzed by the ray tracing method. Taking the interference beam
i1 as an example, when the roll and yaw angles increase at the same time, the pitch angle is still the cause of the main error. Although the roll and yaw angles does not cause significant errors, they do increase the residuals to 1.2 nm after linear fitting.
The analysis results could be further used in experiments with angular sensors or in multi-probe multi-DOF measuring systems.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}