Flexible Zoom Telescopic Optical System Design Based on Genetic Algorithm


Abstract
:1. Introduction
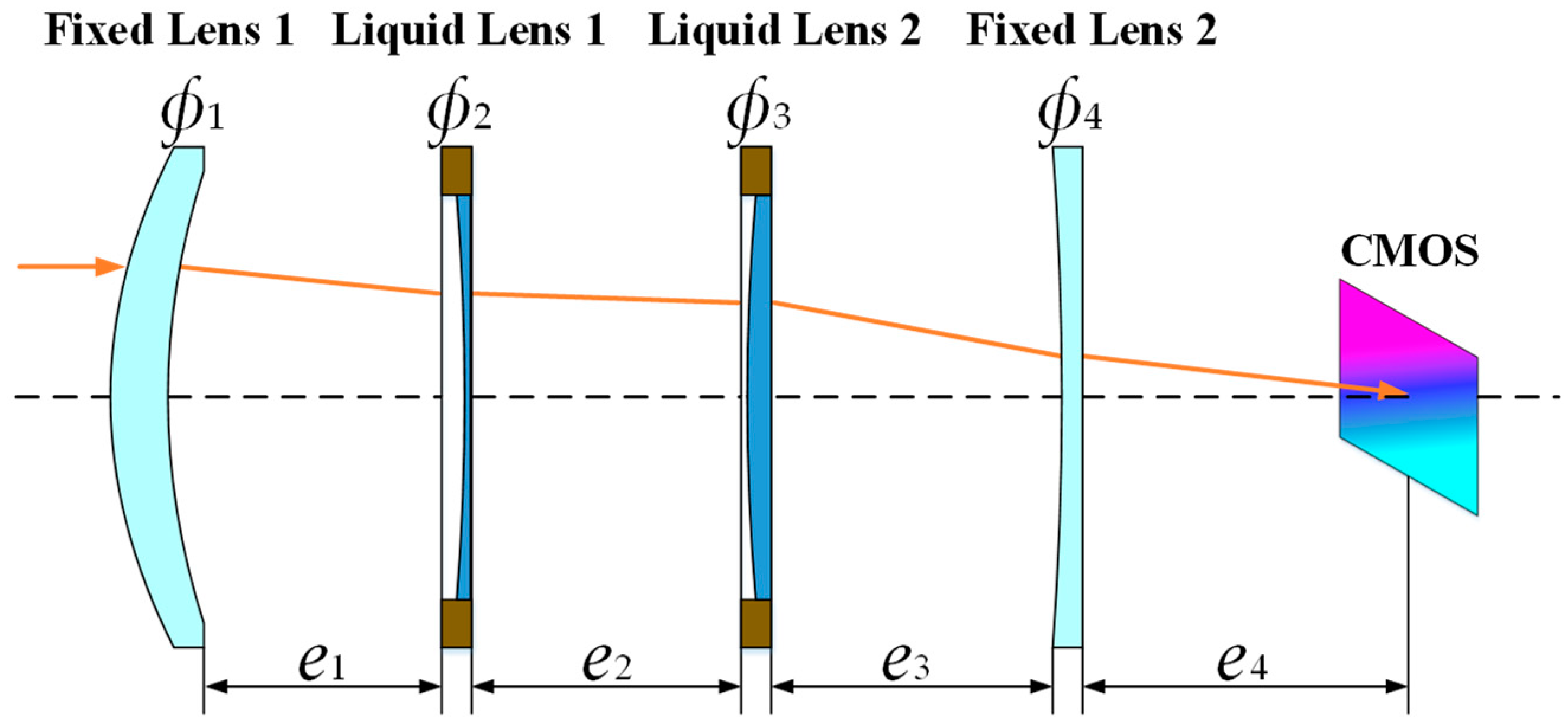
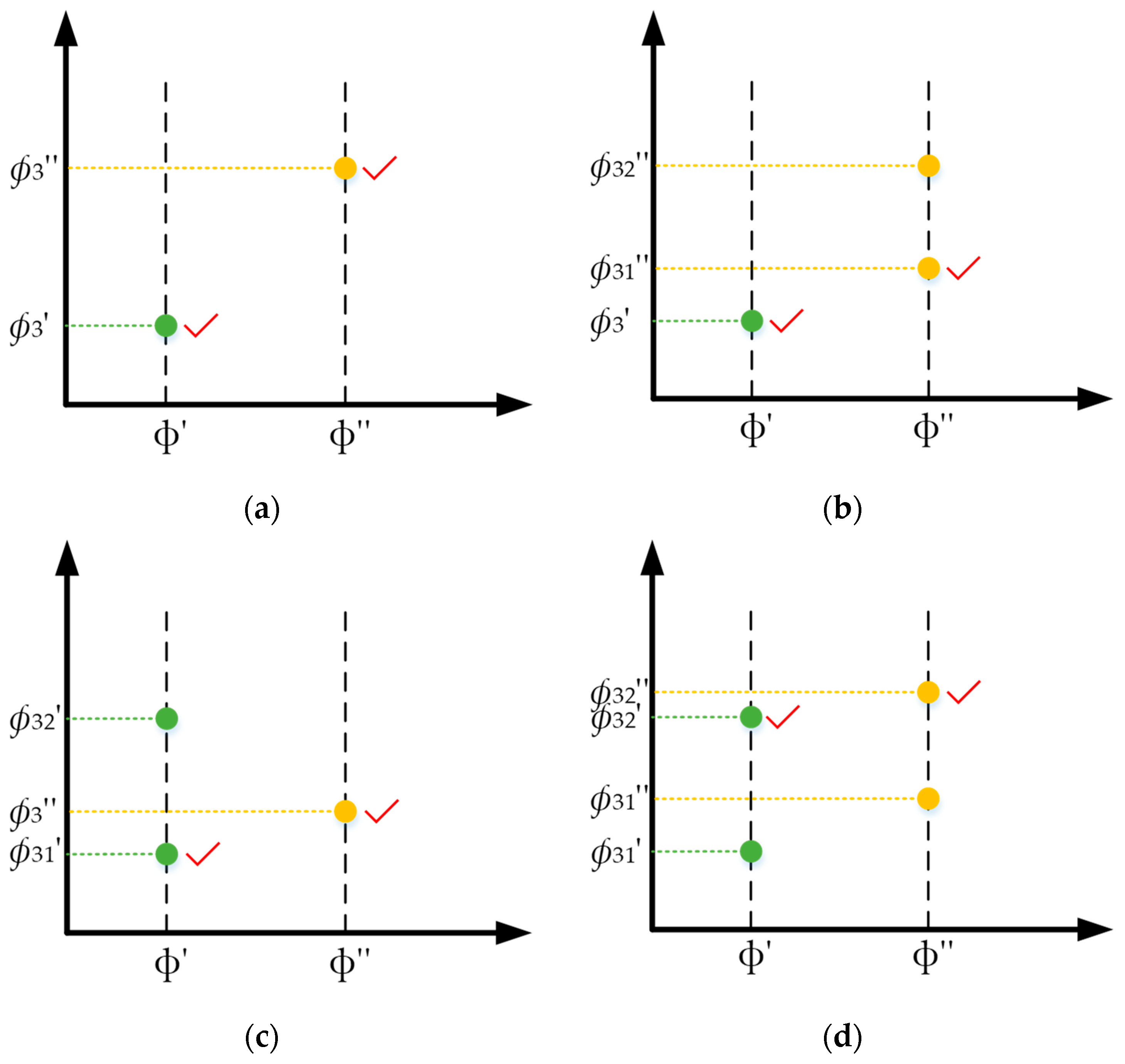
2. Derivation of the Zoom Equation
- ;
- 2.
- ;
- 3.
- ;
- 4.
- ;
3. Solution of the Initial Structure
3.1. Design Index
3.2. Solution Space and Evaluation Function
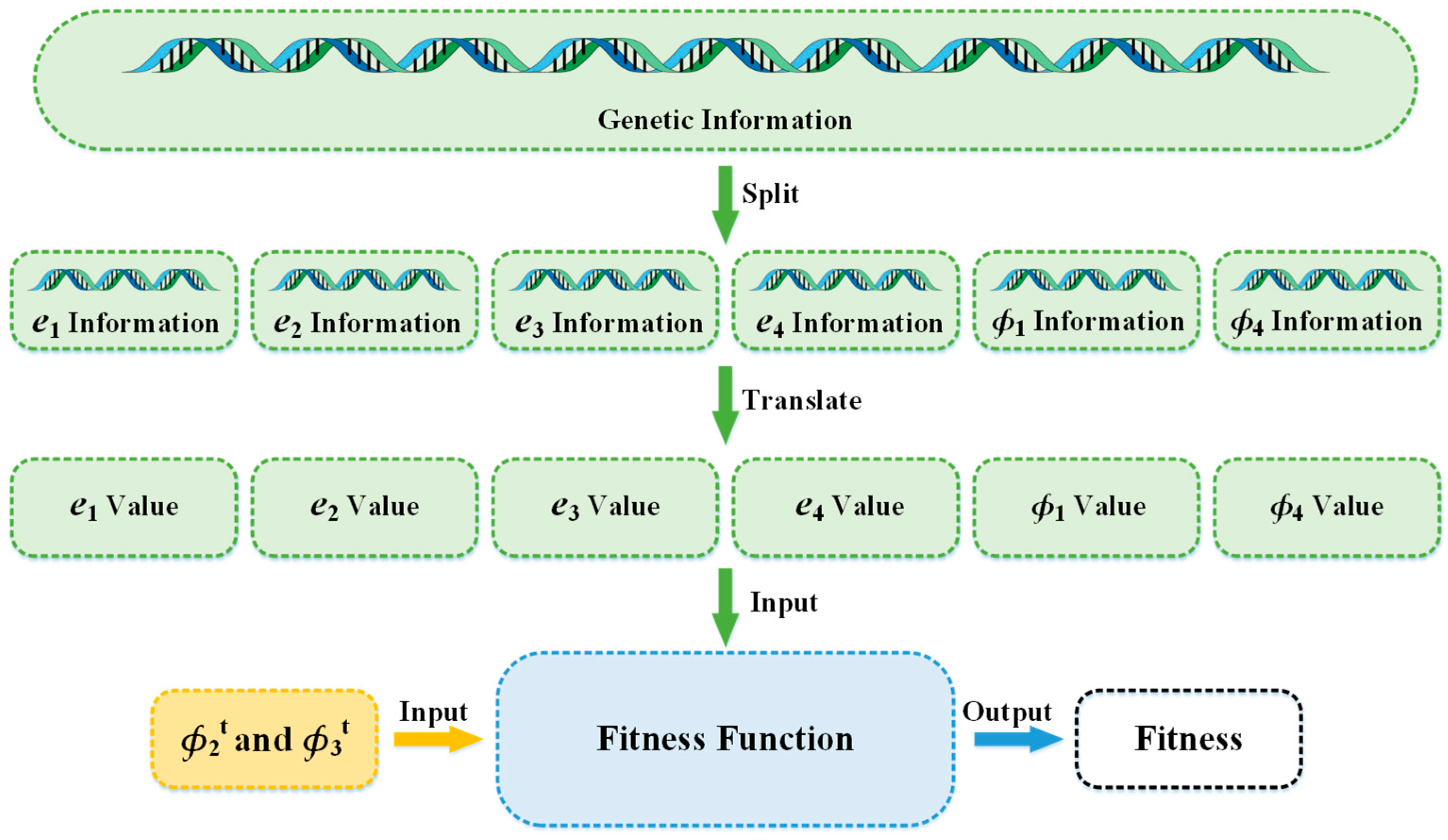
3.3. Genetic Algorithm
- Gene: Each variable of the optimization problem is represented by a fixed length string of 0’s and 1’s, which is called a gene;
- Chromosome: All these genes, which represent all the variables, collectively form a chromosome;
- Individual: Chromosomes may also be referred to as individuals in GA;
- Population: Collection of individuals;
- Genetic information: Binary encoding information of the chromosome;
- Genotype: Binary code of the chromosome;
- Phenotype: Values of variables corresponding to the genotype.
3.3.1. Initialization
3.3.2. Fitness Function
3.3.3. Evolution
- Crossover: When parent 1 crosses with parent 2, a random mask code of equal length with the chromosome’s genotype is generated. When a bit in the mask code is one, the corresponding bit of the child chromosome will inherit the information of that bit in parent 1; when a bit in the mask code is zero, the corresponding bit of the child chromosome will inherit the information of that bit in parent 2.
- Mutation: Each binary digit in the genotype of the child chromosome is mutated with a certain probability (mutation rate): one becomes zero or zero becomes one.
3.3.4. Solution
4. Optimized Design Results and Discussion
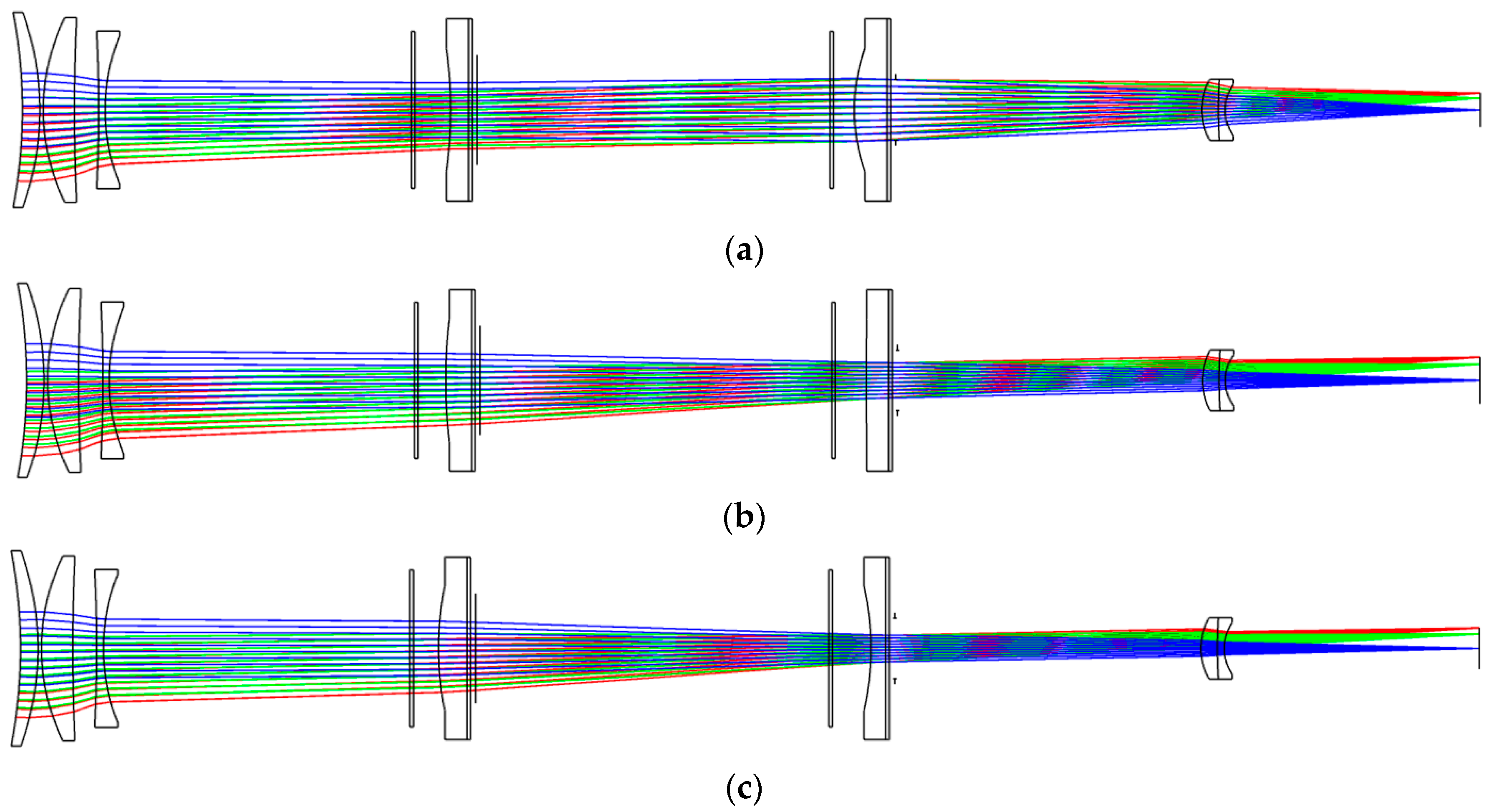
4.1. Optimized Design of the Zoom System
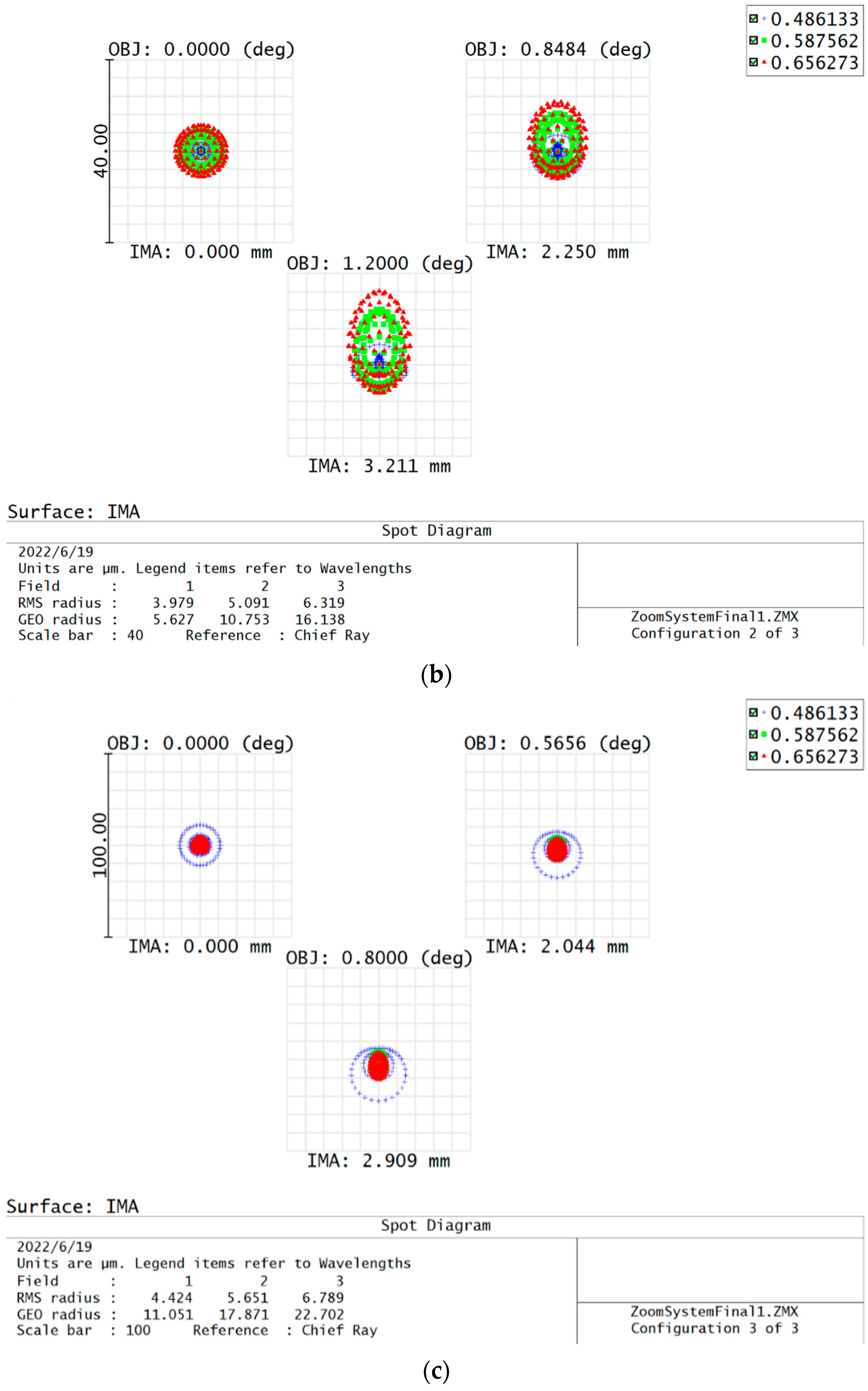
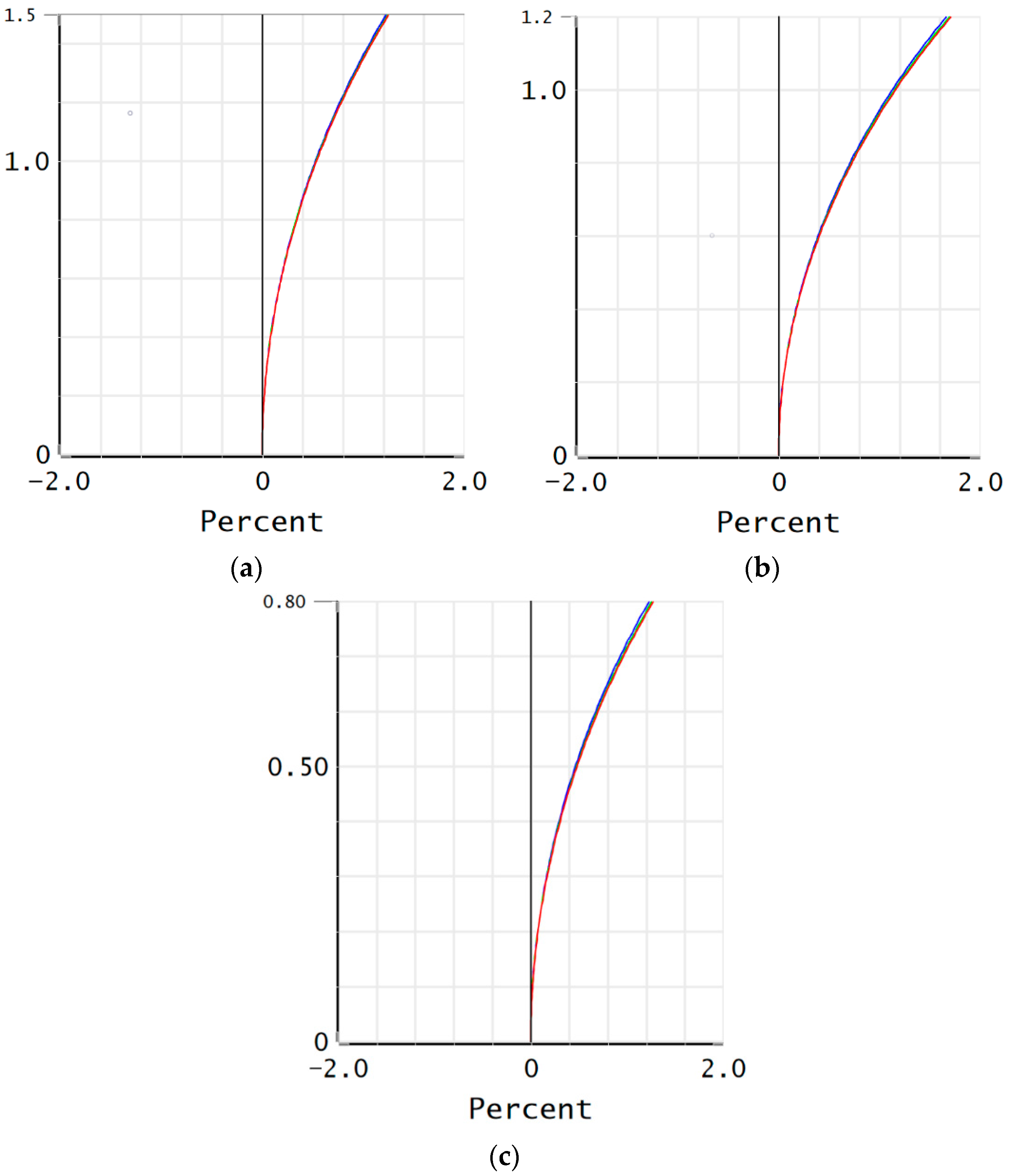
4.2. Image Quality Evaluation
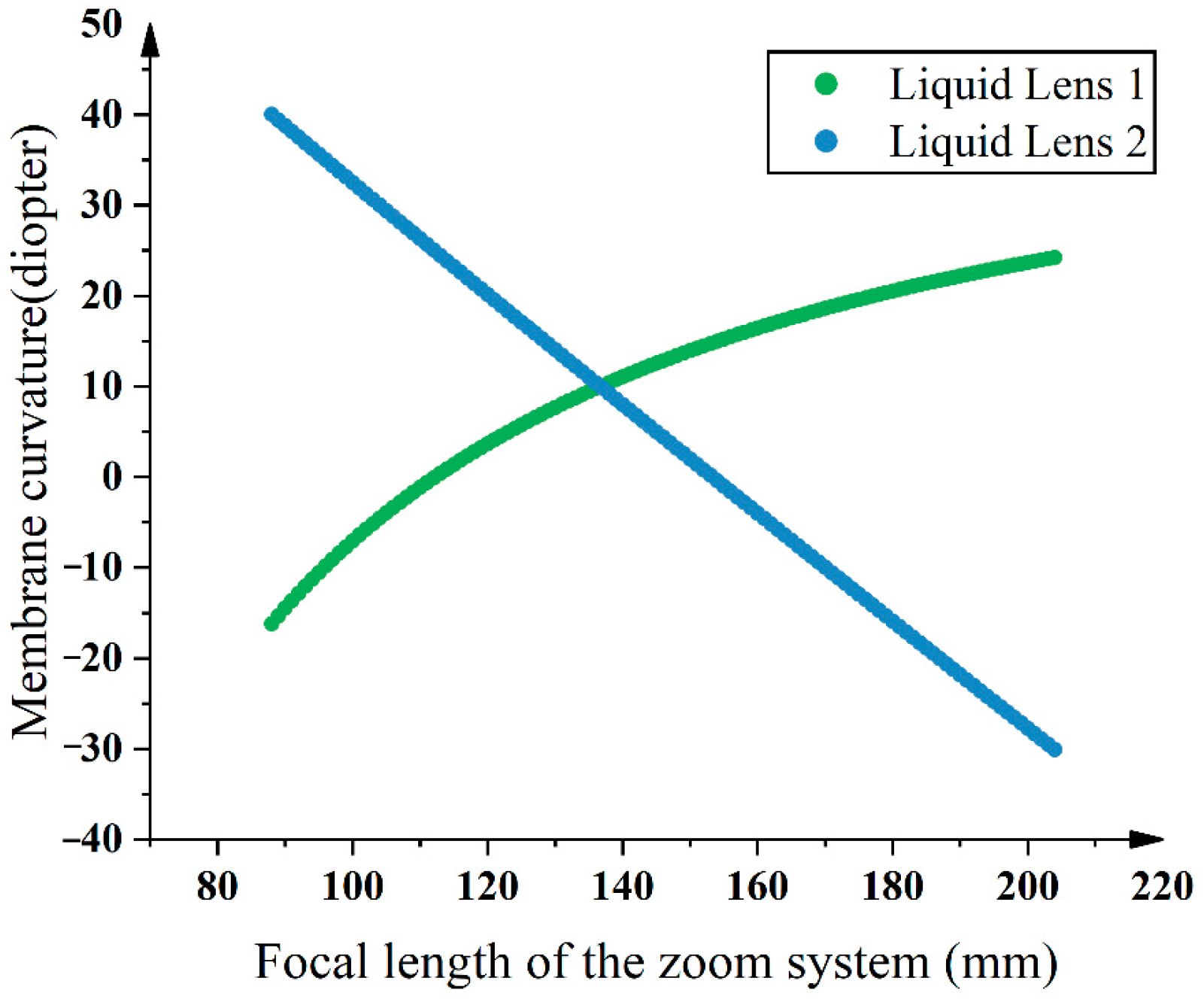
4.3. Zoom Curve Analysis
4.4. Tolerance Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, H.; Cheng, X.; Hao, Q. An Electrically Tunable Zoom System Using Liquid Lenses. Sensors 2015, 16, 45. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, K.; Qu, Z.; Zhong, X.; Li, F.; Yu, S. 40× zoom optical system design based on stable imaging principle of four groups. Appl. Opt. 2022, 61, 1516–1522. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Zhong, X.; Qu, Z.; Meng, Y.; Su, Z. Design method research of a radiation-resistant zoom lens. Opt. Commun. 2022, 509, 127881. [Google Scholar] [CrossRef]
- Qu, R.; Duan, J.; Liu, K.; Cao, J.; Yang, J. Optical Design of a 4× Zoom Lens with a Stable External Entrance Pupil and Internal Stop. Photonics 2022, 9, 191. [Google Scholar] [CrossRef]
- Cheng, X.; Ye, H.; Hao, Q. Synthetic system design method for off-axis stabilized zoom systems with a high zoom ratio. Opt. Express 2021, 29, 10592–10612. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Amani, A.; Zhu, C.; Bai, J. Design of a compact varifocal panoramic system based on the mechanical zoom method. Appl. Opt. 2021, 60, 6448–6455. [Google Scholar] [CrossRef]
- Cao, C.; Liao, Z.; Bai, Y.; Xing, T. Design of large zoom ratio long-wave infrared zoom system with compound zoom method. Opt. Eng. 2018, 57, 025104. [Google Scholar]
- Li, L.; Wang, D.; Liu, C.; Wang, Q. Zoom microscope objective using electrowetting lenses. Opt. Express 2016, 24, 2931–2940. [Google Scholar] [CrossRef] [PubMed]
- Miks, A.; Novak, J. Analysis of two-element zoom systems based on variable power lenses. Opt. Express 2010, 18, 6797–6810. [Google Scholar] [CrossRef]
- Miks, A.; Novak, P. Paraxial design of four-component zoom lens with fixed position of optical center composed of members with variable focal length. Opt. Express 2018, 26, 25611–25616. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Z.; Wang, D.; Zheng, Y.; Liu, C.; Wang, Q. Continuous optical zoom microscopy imaging system based on liquid lenses. Opt. Express 2021, 29, 20322–20335. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Yuan, R.; Wang, J.; Wang, Q. Electrically optofluidic zoom system with a large zoom range and high-resolution image. Opt. Express 2017, 25, 22280–22291. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Yang, B.; Gu, P.; Wang, X.; Zong, H. 50X five-group inner-focus zoom lens design with focus tunable lens using Gaussian brackets and lens modules. Opt. Express 2020, 28, 29098–29111. [Google Scholar] [CrossRef] [PubMed]
- Hao, Q.; Cheng, X.; Du, K. Four-group stabilized zoom lens design of two focal-length-variable elements. Opt. Express 2013, 21, 7758–7767. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.; Wang, H.; Yao, Y.; Tan, S.; Xu, Y.; Ding, Y. Automatic design of a mid-wavelength infrared dual-conjugate zoom system based on particle swarm optimization. Opt. Express 2021, 29, 14868–14882. [Google Scholar] [CrossRef] [PubMed]
- Fan, Z.; Wei, S.; Zhu, Z.; Mo, Y.; Yan, Y.; Ma, D. Automatically retrieving an initial design of a double-sided telecentric zoom lens based on a particle swarm optimization. Appl. Opt. 2019, 58, 7379–7386. [Google Scholar] [CrossRef] [PubMed]
- Fan, Z.; Wei, S.; Zhu, Z.; Yan, Y.; Mo, Y.; Yan, L.; Ma, D. Globally optimal first-order design of zoom systems with fixed foci as well as high zoom ratio. Opt. Express 2019, 27, 38180–38190. [Google Scholar] [CrossRef]
- Pal, S.; Hazra, L. Structural design of mechanically compensated zoom lenses by evolutionary programming. Opt. Eng. 2012, 51, 063001. [Google Scholar] [CrossRef]
- Carsten, R.; Tarik, G.; Alois, H. Development of an open source algorithm for optical system design, combining genetic and local optimization. Opt. Eng. 2020, 59, 055111. [Google Scholar]
- Zhou, H.; Liu, Y.; Sun, Q.; Li, C.; Zhang, X.; Huang, J. Mechanically compensated type for midwave infrared zoom system with a large zoom ratio. Opt. Eng. 2013, 52, 013002. [Google Scholar]
- Herzberger, M. Gaussian Optics and. Gaussian Brackets. J. Opt. Soc. Amer. 1943, 33, 651–655. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- Michalewicz, Z.; Schoenauer, M. Evolutionary Algorithms for Constrained Parameter Optimization Problems. Evol. Comput. 1996, 4, 1–32. [Google Scholar] [CrossRef]
- Zemax. Available online: https://www.zemax.net.cn/pages/opticstudio/ (accessed on 2 June 2022).
- Optotune. Available online: https://www.optotune.com/ (accessed on 4 June 2022).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Focal length | 88–204 mm |
| F number | 8.8–20.4 |
| Field of view | 1.6–3° |
| Working spectrum | 486–656 nm |
| Distortion | ≤2 |
| MTF (50 lp/mm) | ≥0.2 |
| Parameters | Values |
|---|---|
| Population Size | 1000 |
| Chromosome Size | 109 |
| Cross Rate | 0.8 |
| Mutation Rate | 0.003 |
| Evolving Algebra | 500 |
| Parameters | Values |
|---|---|
| 37.3 mm | |
| 95.598 mm | |
| 64.619 mm | |
| 35.316 mm | |
| 6.071 diopter | |
| 8.174 diopter |
| Surface | # | Radius (mm) | Thickness (mm) | Material |
|---|---|---|---|---|
| object | Infinity | Infinity | ||
| Fixed Group 1 | 1 | −73.263 | 2.404 | E-LLF6 |
| 2 | −39.564 | 0.500 | ||
| 3 | 28.744 | 4.274 | H-ZLAF55F | |
| 4 | 260.310 | 3.296 | ||
| 5 | −228.547 | 0.900 | CAWO4-E | |
| 6 | 26.941 | 41.998 | ||
| Liquid Lens 1 | 7 | Infinity | 0.500 | D263T |
| 8 | Infinity | zoom | ||
| 9 | zoom | zoom | OL1224_VIS | |
| 10 | Infinity | 0.500 | D263T | |
| 11 | Infinity | 0.700 | ||
| 12 | Infinity | 48.423 | ||
| Liquid Lens 2 | 13 | Infinity | 0.500 | D263T |
| 14 | Infinity | zoom | ||
| 15 | zoom | zoom | OL1224_VIS | |
| 16 | Infinity | 0.500 | D263T | |
| 17 | Infinity | 0.700 | ||
| 18 | Infinity | 41.998 | ||
| Fixed Group 2 | 19 | 8.850 | 2.249 | D-LAF50 |
| 20 | 58.608 | 0.900 | LF5G15 | |
| 21 | 6.105 | 34.998 | ||
| Image | Infinity |
| Tolerance Items | Values |
|---|---|
| Radius/fringe | ≤3 |
| Thickness/mm | ±0.02 |
| Surface decenter/mm | ±0.02 |
| Element tilt/° | ±0.02 |
| Element decenter/mm | ±0.02 |
| Surface irregularity/fringe | ≤0.3 |
| Refractive index | ±0.001 |
| Abbe number/% | ±0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Hong, H.; Gan, Z.; Chen, Y.; Xing, K. Flexible Zoom Telescopic Optical System Design Based on Genetic Algorithm. Photonics 2022, 9, 536. https://doi.org/10.3390/photonics9080536
Liu Z, Hong H, Gan Z, Chen Y, Xing K. Flexible Zoom Telescopic Optical System Design Based on Genetic Algorithm. Photonics. 2022; 9(8):536. https://doi.org/10.3390/photonics9080536
Chicago/Turabian StyleLiu, Zhaoyang, Huajie Hong, Zihao Gan, Yaping Chen, and Kunsheng Xing. 2022. "Flexible Zoom Telescopic Optical System Design Based on Genetic Algorithm" Photonics 9, no. 8: 536. https://doi.org/10.3390/photonics9080536