
Enhanced Characterization of Fractured Zones in Bedrock Using Hydraulic Tomography through Joint Inversion of Hydraulic Head and Flux Data


Abstract
:1. Introduction
2. Materials and Methods
2.1. Synthetical Model
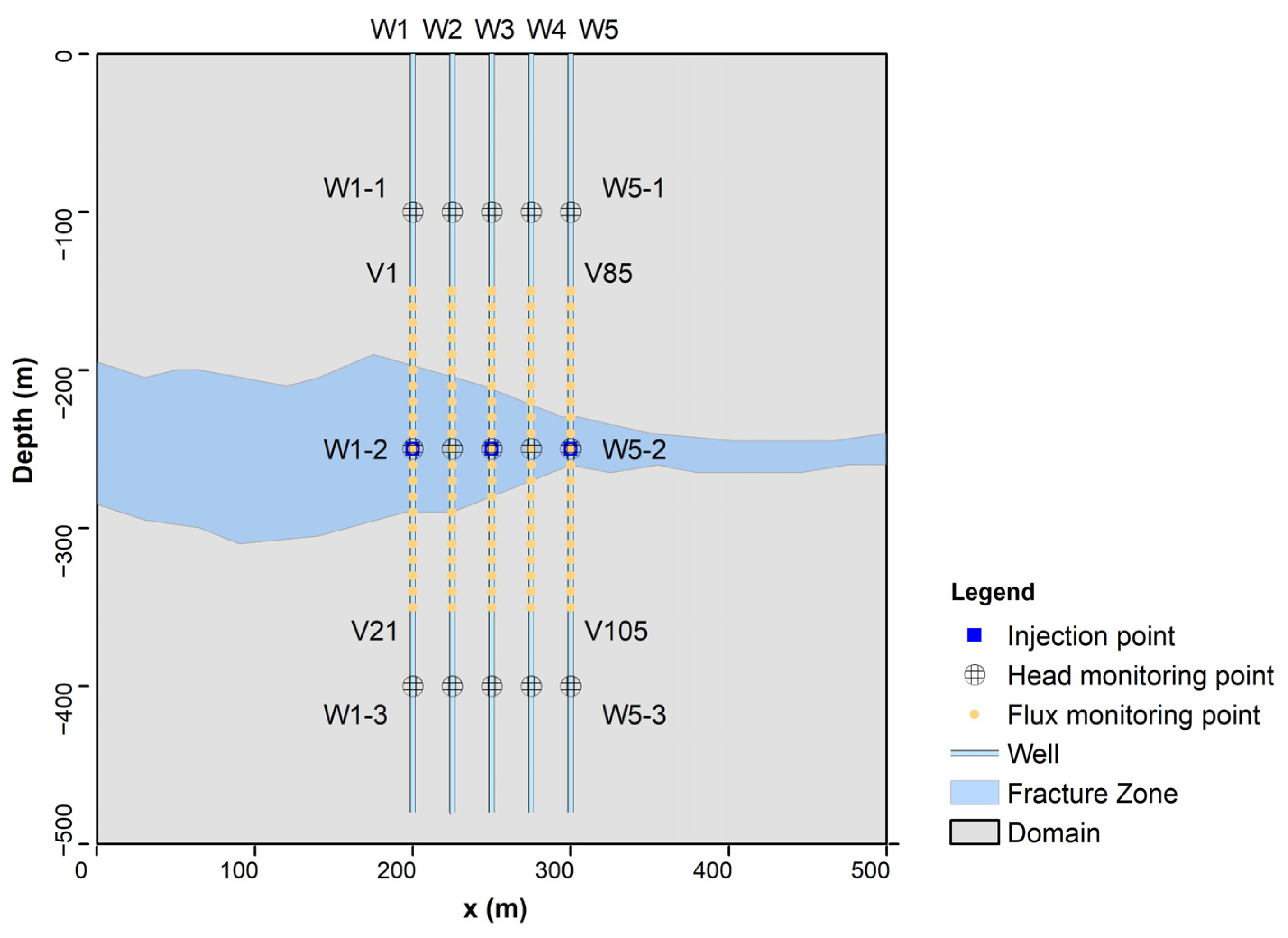
2.1.1. Model Setup
2.1.2. Synthetic Injection Tests Used for Inversion and Validation
2.2. Hydraulic Tomography of Synthetic Head and Flux Data
2.2.1. Inverse Modeling Approach
2.2.2. Inverse Model Setup
- Model_V uses only the flux dataset, utilizing data from all 105 flux monitoring points;
- Model_H uses only the water head dataset, incorporating data from 15 monitoring points;
- Model_H-V combines the water head and flux data using the results of Model_V as the prior parameter field and then integrating the water head data for joint inversion.
3. Results
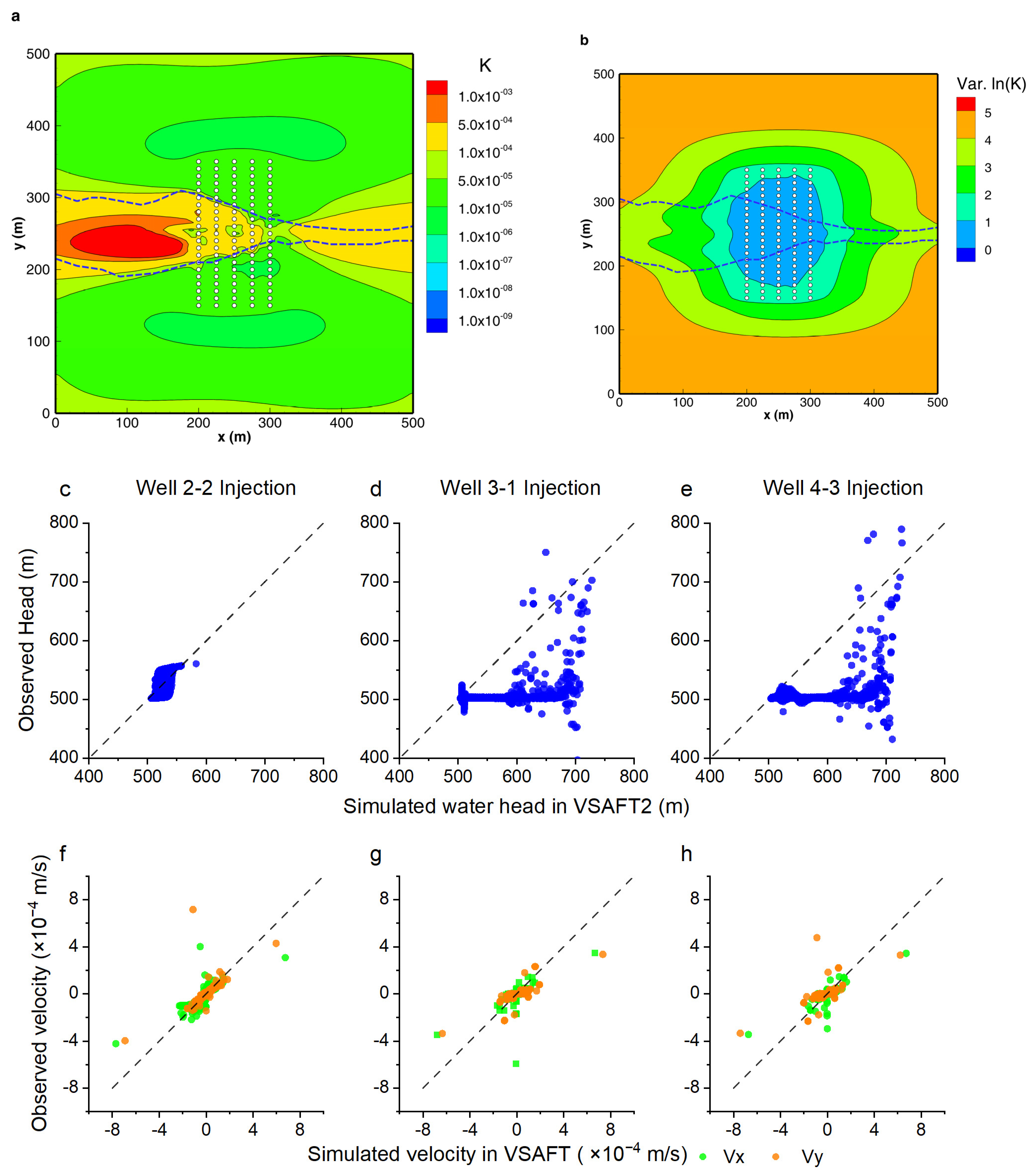
3.1. K Estimates from Flux Data and Model Validation
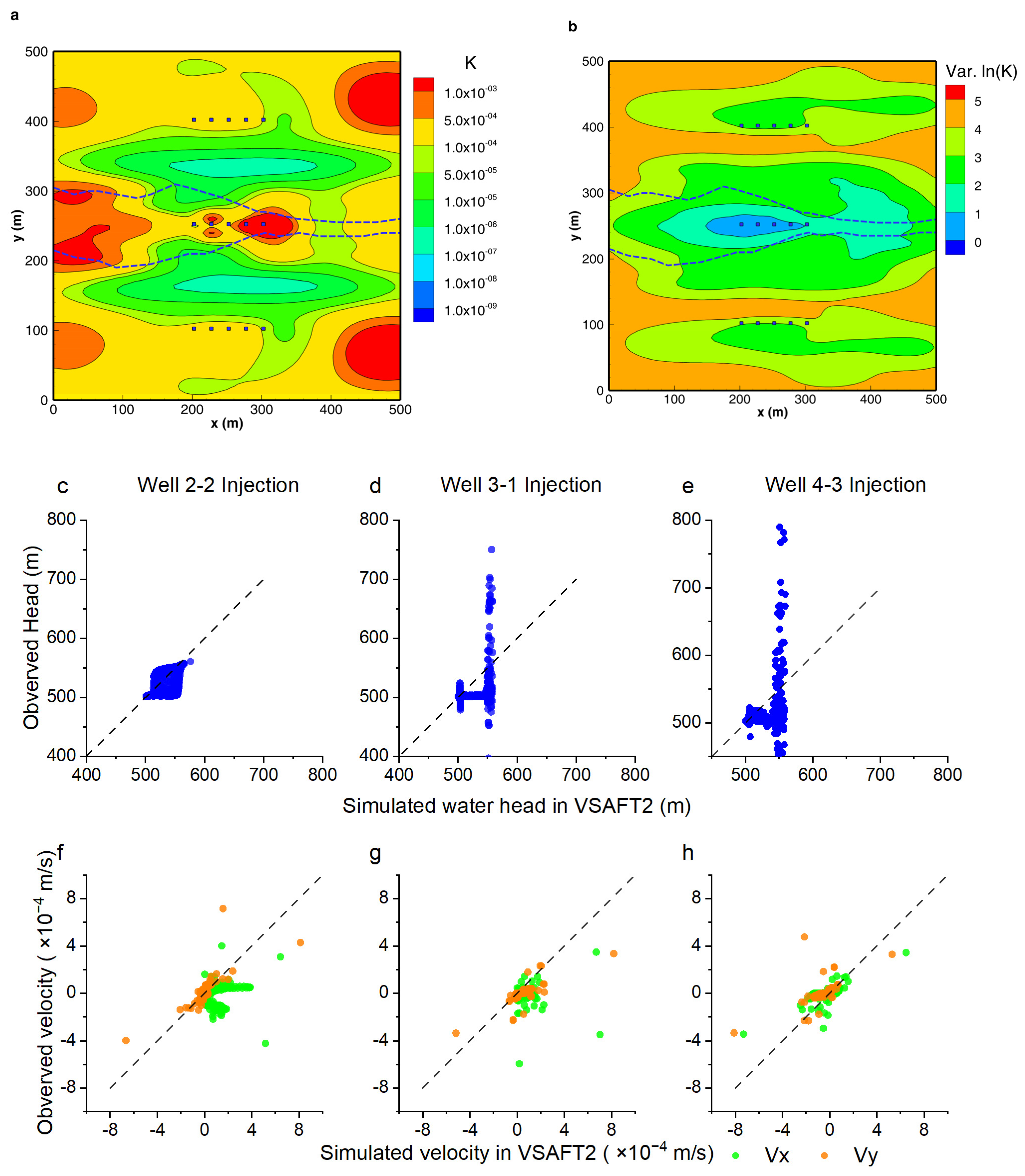
3.2. K Estimates from the Head Data and Model Validation
3.3. K Estimates from Head–Flux Data and Model Validation
4. Discussion
4.1. Differences between Head Data and Flux Data in K Estimation and Fractured Zones Characterization
4.2. Enhancements in Hydraulic Tomography through Flux Data Integration
4.3. Application Strategy of Head and Flux Data in Fractured Zone Characterization Using Hydraulic Tomography
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Deng, H.; Spycher, N. Modeling Reactive Transport Processes in Fractures. Rev. Mineral. Geochem. 2019, 85, 49–74. [Google Scholar] [CrossRef]
- Maréchal, J.C.; Dewandel, B.; Subrahmanyam, K. Use of hydraulic tests at different scales to characterize fracture network properties in the weathered-fractured layer of a hard rock aquifer. Water Resour. Res. 2004, 40, W11508. [Google Scholar] [CrossRef]
- Ren, S.; Gragg, S.; Zhang, Y.; Carr, B.J.; Yao, G. Borehole characterization of hydraulic properties and groundwater flow in a crystalline fractured aquifer of a headwater mountain watershed, Laramie Range, Wyoming. J. Hydrol. 2018, 561, 780–795. [Google Scholar] [CrossRef]
- Cardiff, M.; Barrash, W. 3-D transient hydraulic tomography in unconfined aquifers with fast drainage response. Water Resour. Res. 2011, 47, W12518. [Google Scholar] [CrossRef]
- Xiang, J.; Yeh, T.-C.J.; Lee, C.-H.; Hsu, K.-C.; Wen, J.-C. A simultaneous successive linear estimator and a guide for hydraulic tomography analysis. Water Resour. Res. 2009, 45, W02432. [Google Scholar] [CrossRef]
- Zhu, J.; Yeh, T.-C.J. Characterization of aquifer heterogeneity using transient hydraulic tomography. Water Resour. Res. 2005, 41, W07028. [Google Scholar] [CrossRef]
- Yeh, T.-C.J.; Liu, S. Hydraulic tomography: Development of a new aquifer test method. Water Resour. Res. 2000, 36, 2095–2105. [Google Scholar] [CrossRef]
- Zha, Y.; Yeh, T.-C.J.; Illman, W.A.; Tanaka, T.; Bruines, P.; Onoe, H.; Saegusa, H. What does hydraulic tomography tell us about fractured geological media? A field study and synthetic experiments. J. Hydrol. 2015, 531, 17–30. [Google Scholar] [CrossRef]
- Illman, W.A. Hydraulic Tomography Offers Improved Imaging of Heterogeneity in Fractured Rocks. Groundwater 2014, 52, 659–684. [Google Scholar] [CrossRef]
- Illman, W.A.; Liu, X.; Takeuchi, S.; Yeh, T.-C.J.; Ando, K.; Saegusa, H. Hydraulic tomography in fractured granite: Mizunami Underground Research site, Japan. Water Resour. Res. 2009, 45, W01406. [Google Scholar] [CrossRef]
- Zha, Y.; Yeh, T.-C.J.; Illman, W.A.; Tanaka, T.; Bruines, P.; Onoe, H.; Saegusa, H.; Mao, D.; Takeuchi, S.; Wen, J.-C. An Application of Hydraulic Tomography to a Large-Scale Fractured Granite Site, Mizunami, Japan. Groundwater 2016, 54, 793–804. [Google Scholar] [CrossRef] [PubMed]
- Hao, Y.; Yeh, T.-C.J.; Xiang, J.; Illman, W.A.; Ando, K.; Hsu, K.-C.; Lee, C.-H. Hydraulic Tomography for Detecting Fracture Zone Connectivity. Groundwater 2008, 46, 183–192. [Google Scholar] [CrossRef] [PubMed]
- Sharmeen, R.; Illman, W.A.; Berg, S.J.; Yeh, T.-C.J.; Park, Y.-J.; Sudicky, E.A.; Ando, K. Transient hydraulic tomography in a fractured dolostone: Laboratory rock block experiments. Water Resour. Res. 2012, 48, W10532. [Google Scholar] [CrossRef]
- Sreeparvathy, V.; Kambhammettu, B.V.N.P.; Peddinti, S.R.; Sarada, P.S.L. Application of ERT, Saline Tracer and Numerical Studies to Delineate Preferential Paths in Fractured Granites. Groundwater 2019, 57, 126–139. [Google Scholar] [CrossRef]
- Ringel, L.M.; Illman, W.A.; Bayer, P. Recent developments, challenges, and future research directions in tomographic characterization of fractured aquifers. J. Hydrol. 2024, 631, 130709. [Google Scholar] [CrossRef]
- Tiedeman, C.R.; Barrash, W. Hydraulic Tomography: 3D Hydraulic Conductivity, Fracture Network, and Connectivity in Mudstone. Groundwater 2020, 58, 238–257. [Google Scholar] [CrossRef]
- Dong, Y.; Fu, Y.; Yeh, T.-C.J.; Wang, Y.-L.; Zha, Y.; Wang, L.; Hao, Y. Equivalence of Discrete Fracture Network and Porous Media Models by Hydraulic Tomography. Water Resour. Res. 2019, 55, 3234–3247. [Google Scholar] [CrossRef]
- Pouladi, B.; Bour, O.; Longuevergne, L.; de La Bernardie, J.; Simon, N. Modelling borehole flows from Distributed Temperature Sensing data to monitor groundwater dynamics in fractured media. J. Hydrol. 2021, 598, 126450. [Google Scholar] [CrossRef]
- Michael Tso, C.-H.; Zha, Y.; Jim Yeh, T.-C.; Wen, J.-C. The relative importance of head, flux, and prior information in hydraulic tomography analysis. Water Resour. Res. 2016, 52, 3–20. [Google Scholar] [CrossRef]
- Zha, Y.; Yeh, T.-C.J.; Mao, D.; Yang, J.; Lu, W. Usefulness of flux measurements during hydraulic tomographic survey for mapping hydraulic conductivity distribution in a fractured medium. Adv. Water Resour. 2014, 71, 162–176. [Google Scholar] [CrossRef]
- Liu, F.; Yeh, T.-C.J.; Song, X.; Wang, Y.-L.; Wen, J.-C.; Hao, Y.; Wang, W. Temporal sampling and role of flux measurements for subsurface heterogeneous characterization in groundwater basins using hydraulic tomography. Hydrol. Process. 2021, 35, e14299. [Google Scholar] [CrossRef]
- Simon, N.; Bour, O.; Lavenant, N.; Porel, G.; Nauleau, B.; Klepikova, M. Monitoring groundwater fluxes variations through active-DTS measurements. J. Hydrol. 2023, 622, 129755. [Google Scholar] [CrossRef]
- Simon, N.; Bour, O. An ADTS Toolbox for Automatically Interpreting Active Distributed Temperature Sensing Measurements. Groundwater 2023, 61, 215–223. [Google Scholar] [CrossRef] [PubMed]
- Munn, J.D.; Maldaner, C.H.; Coleman, T.I.; Parker, B.L. Measuring Fracture Flow Changes in a Bedrock Aquifer Due to Open Hole and Pumped Conditions Using Active Distributed Temperature Sensing. Water Resour. Res. 2020, 56, e2020WR027229. [Google Scholar] [CrossRef]
- Simon, N.; Bour, O.; Lavenant, N.; Porel, G.; Nauleau, B.; Pouladi, B.; Longuevergne, L.; Crave, A. Numerical and Experimental Validation of the Applicability of Active-DTS Experiments to Estimate Thermal Conductivity and Groundwater Flux in Porous Media. Water Resour. Res. 2021, 57, e2020WR028078. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test ID | Injection Point | Head Dataset | Flux Dataset | |
|---|---|---|---|---|
| Injection-1 | Well3-2 | H (m) | Vx | Vy |
| Injection-2 | Well1-2 | n = 15 × 3 | n = 105 × 3 | n = 105 × 3 |
| Injection-3 | Well5-2 | |||
| Item | Injection Point | Performance | ||
|---|---|---|---|---|
| MAE | RMSE | R2 | ||
| H Vx Vy | Well2-2 | 12.3 | 13.9 | 0.42892 |
| 5.25 × 10−6 | 1.72 × 10−5 | 0.68148 | ||
| 2.89 × 10−6 | 1.52 × 10−5 | 0.41830 | ||
| H | Well3-1 | 923 | 12,000 | 0.23953 |
| Vx | 1.00 × 10−5 | 2.00 × 10−5 | 0.24664 | |
| Vy | 9.05 × 10−6 | 1.82 × 10−5 | 0.42225 | |
| H | Well4-3 | 926 | 12,000 | 0.22680 |
| Vx | 9.91 × 10−6 | 1.85 × 10−5 | 0.35522 | |
| Vy | 8.28 × 10−6 | 1.92 × 10−5 | 0.27644 | |
| Item | Injection Point | Performance | ||
|---|---|---|---|---|
| MAE | RMSE | R2 | ||
| H Vx Vy | Well2-2 | 9.28 | 17.8 | 0.38611 |
| 1.54 × 10−5 | 4.90 × 10−5 | 0.00719 | ||
| 3.06 × 10−6 | 1.37 × 10−5 | 0.52576 | ||
| H | Well3-1 | 901 | 12,100 | 0.03772 |
| Vx | 1.10 × 10−5 | 3.11 × 10−5 | 0.00133 | |
| Vy | 4.12 × 10−6 | 1.54 × 10−5 | 0.46020 | |
| H | Well4-3 | 903 | 12,100 | 0.04587 |
| Vx | 1.03 × 10−5 | 2.33 × 10−5 | 0.30368 | |
| Vy | 4.24 × 10−6 | 1.85 × 10−5 | 0.23828 | |
| Item | Injection Point | Performance | ||
|---|---|---|---|---|
| MAE | RMSE | R2 | ||
| H Vx Vy | Well2-2 | 13.5 | 21.8 | 0.30778 |
| 9.69 × 10−6 | 4.04 × 10−5 | 0.33187 | ||
| 3.05 × 10−6 | 2.30 × 10−5 | 0.10038 | ||
| H | Well3-1 | 925 | 12,000 | 0.14469 |
| Vx | 1.04 × 10−5 | 2.62 × 10−5 | 0.15412 | |
| Vy | 6.08 × 10−6 | 2.35 × 10−5 | 0.31949 | |
| H | Well4-3 | 926 | 12,000 | 0.18428 |
| Vx | 9.74 × 10−6 | 2.38 × 10−5 | 0.23306 | |
| Vy | 6.04 × 10−6 | 2.68 × 10−5 | 0.12498 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Y.; Fu, Y.; Wang, L. Enhanced Characterization of Fractured Zones in Bedrock Using Hydraulic Tomography through Joint Inversion of Hydraulic Head and Flux Data. Hydrology 2024, 11, 122. https://doi.org/10.3390/hydrology11080122
Dong Y, Fu Y, Wang L. Enhanced Characterization of Fractured Zones in Bedrock Using Hydraulic Tomography through Joint Inversion of Hydraulic Head and Flux Data. Hydrology. 2024; 11(8):122. https://doi.org/10.3390/hydrology11080122
Chicago/Turabian StyleDong, Yanhui, Yunmei Fu, and Liheng Wang. 2024. "Enhanced Characterization of Fractured Zones in Bedrock Using Hydraulic Tomography through Joint Inversion of Hydraulic Head and Flux Data" Hydrology 11, no. 8: 122. https://doi.org/10.3390/hydrology11080122