1. Introduction
Hunger, one of the most prominent problems in the world today, is primarily caused by a shortage of fresh water [
1]. This problem is especially severe in third-world countries and regions with low rainfall or that are prone to severe droughts. For example, the most recent California drought (2013–2016) vividly demonstrated the importance of fresh water conservation [
2,
3]. The state’s large agricultural industry was most heavily impacted by the weather abnormality [
3], with some crops being completely deprived of irrigation water. The expense of lost plants forced many farmers to reconsider their irrigation methods. The use of traditional sprinkler systems is accompanied by substantial evaporation and watering of unused soil regions. In response to this, some farmers have implemented subsurface drip irrigation systems, which can save up to 25–50 percent of water [
4,
5,
6,
7,
8]. Furthermore, significant optimization of water use can be achieved by knowing the exact time and amount of needed water, as well as the specific location of soil that requires irrigation. Recently, various novel methods for soil moisture measurement have been developed [
9,
10], which can be used for the intelligent irrigation control systems. In order to measure the soil moisture content, different physical properties of soil may be analyzed, such as the dielectric constant, resistivity, thermal conductivity, neutron absorption and others. For example, dry soil has a dielectric constant of 2–5, while water has the dielectric constant equal to ~81 [
11,
12,
13]. Because of this large difference, the most accurate moisture sensors use it to determine the moisture content [
9,
10,
11,
12,
13]. Time Domain Reflectometry (TDR) proved to be one of the most accurate measurement techniques [
11,
12,
13]. This method has little dependence on soil type and thus does not require calibration for every new soil. Another parameter which can be used for estimation of moisture content is the thermal conductivity of soil, which noticeably changes when moisture content is changed but it is also affected by other factors such soil composition. Neutrons are heavily scattered by hydrogen contained in water and, at the same time, they easily penetrate dry soil [
14]. However, neutron-based sensors are impractical for wide use in the field.
Another soil parameter that can be used to measure moisture content is soil resistivity, which typically varies between 10 and 1000 Ω·m [
15]. The deficiency of this parameter is in the fact that resistivity greatly varies between different types of soils and can be affected by added substances, such as fertilizer. Resistivity can also be affected by soil salinity, which can change as the season progresses. It can also change with temperature, as resistance increases dramatically at temperatures close to or below freezing. The resistance of soil was reported to change by a factor of ~2.5 from the month of February to May [
16]. However, the resistance did not change that much during the months of crop production when irrigation is required. If necessary, the variation of resistance with temperature can be corrected to current temperature after proper calibration for a particular type of soil [
16,
17,
18]. However, there are several reasons why soil resistance is still used for the measurement of soil properties. The capability of DC signal to penetrate large distances in soil, for example, is widely utilized in soil resistivity measurements in geophysical research when implemented in electrical resistivity tomography (ERT) systems [
19,
20]. Resistivity measurements also involve relatively simple DC electronics, rather than expensive high frequency circuits.
Most traditional soil moisture sensors provide single-point information on moisture content and remain somewhat expensive for wide use in irrigation control systems. A wide range of commercially available single-point (and single line) sensors exists at the present time. However, irrigation can be made significantly more efficient if volumetric information on soil moisture distribution is known. The volumetric measurement of soil moisture has already been demonstrated in principle in a laboratory-based prototype system (e.g., as described in references [
21,
22,
23] with a TDR sensor [
24]), or in a permanently installed system of multiple sensors on a 3D grid as in reference [
25]. However, such systems still remain less practical compared to single-point measurement of soil moisture content and do not have wide use outside of research installations.
In this paper, a method of volumetric measurement of relative soil moisture content is introduced together with a possible hardware implementation in a standalone, easy-to-install system. It is not intended to replace or outperform existing soil moisture sensors but rather to provide a low-cost alternative for volumetric measurement of moisture content around plant roots. Despite many deficiencies of the present system, such as its sensitivity to the salinity of soil, temperature, or porosity, this system can be an attractive, affordable alternative to existing sensors, with a multi-unit implementation in the field. Moreover, the inaccuracy of measurement due to variation of factors other than soil content can be corrected by the correlation of sensor volumetric data with an accurate single-point TDR sensor (e.g., as it has been demonstrated in a system described in reference [
21]).
The recent development of inexpensive microelectronics enabled fast data acquisition and processing, which are utilized in the sensor described in this paper. The system uses multiple measurements of resistance to reconstruct the relative three-dimensional distribution of moisture in real-time. Although the system is not as precise as many single-point sensors, its volumetric output, simplicity and low cost can be advantageous for wide use in precision irrigation. The system is capable of wireless data transmission, pairs all measurements with exact time and location from a GPS signal, can store large amounts of historical data (~12 months as defined by the capacity of the storage memory), features one-button calibration, automatically adjusts the accuracy of resistivity measurements for different types of soil and, most importantly, provides real-time 3-D imaging of relative soil moisture content. By using this system, farmers can volumetrically optimize their irrigation methods, applying water to specific locations within the root system of various plants. Through the virtue of the system’s affordability (can be less than 10 dollars in mass production), multiple units may be placed throughout the field to enable the most efficient irrigation. In addition, analysis of historical data allows for optimization and planning of future watering techniques.
2. Materials and Methods
2.1. System Design
In contrast to single-point moisture sensors, the present system measures volumetric relative moisture distribution. This is done by measuring soil resistance between multiple points located on opposite sides of the tested volume, followed by data processing, which reconstructs the three-dimensional moisture content. Similar to conventional tomographic imaging in which transmission through the sample is measured at different angles [
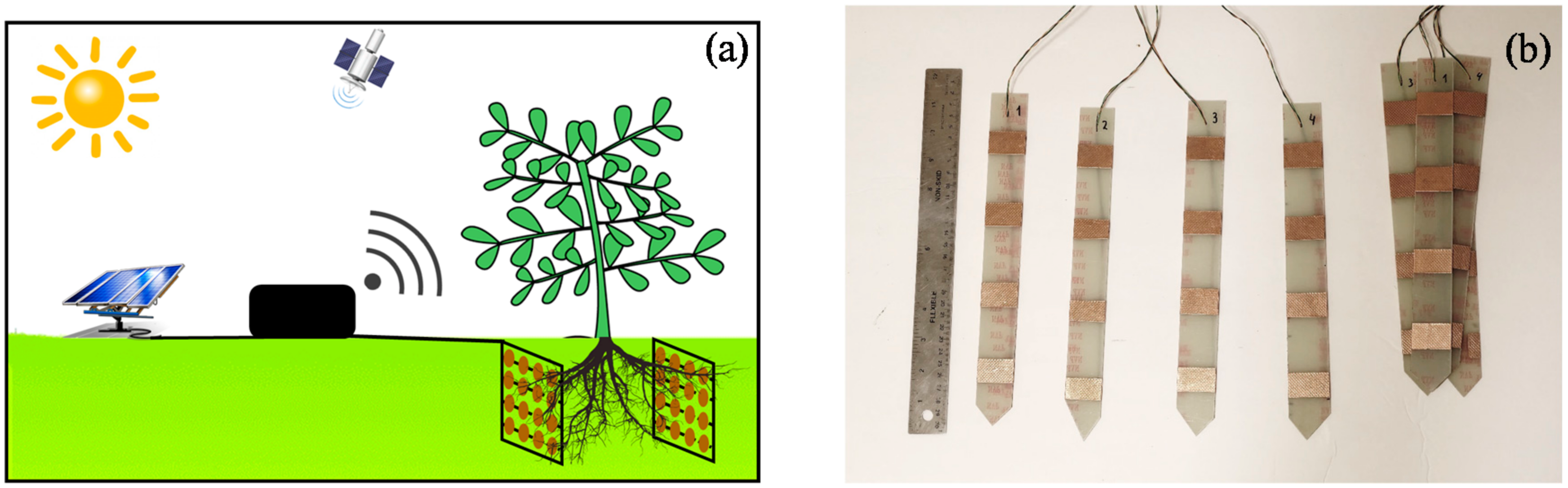
26], the present approach effectively probes resistance throughout the volume at various angles. For this reason, two sets of electrodes need to be placed on opposite sides of the tested volume as shown in
Figure 1. The volumetric distribution of soil moisture content is determined from soil resistance. Two sets of electrodes are placed at opposite sides of a plant root. Resistance between all pairs of electrodes is measured multiple times per second. Measured data paired with exact time and location from a GPS signal is transferred via a wireless connection and simultaneously stored locally on an SD card. Electrode arrays can compose different geometries, including a rectangular, circular, or other grids. One example of an easy-to-install electrode array is shown in
Figure 1b, which consists of individual flat rods, each containing four electrodes. Corrosion-resistive metals should be used for electrode plating, similarly to other existing soil moisture sensors. Due to their simple construction, the electrodes can also be disposable and can be recoated at the start of each season. The placement of sensors relative to each other and to the tested volume determines the measured values of resistance. Therefore, separate electrodes should be installed at nearly equal intervals but not to a millimeter accuracy. A very accurate alignment of electrodes is not needed and manual installation is sufficient for the operation of present system.
After acquiring resistance values, the solar-powered control unit pairs these values with the exact time and location retrieved from a GPS signal, which can be used to locate the position of a particular sensor if multiple systems are used throughout the field or if historical data is analyzed for a sensor that was moved around the field. Data is stored locally on an SD card and sent via a wireless connection. The system continuously self-adjusts for the most precise measurements in the given medium, as described in
Section 2.2.
Theoretically, the system is capable of measuring the quantitative moisture content with appropriate calibration. However, for practical irrigation purposes, it is not necessary to know the exact value of moisture content. It is important to make a decision on where and when water should be applied and when irrigation should be stopped. If information on the moisture content at a single point is sufficient for irrigation control, the present system does not have any benefits compared to accurate sensors, such as ones based on the measurement of the dielectric constant. However, when real-time volumetric information is used to optimize the irrigation protocol for a large field (thus requiring many sensors) the present affordable (and yet not very accurate system) can be an attractive alternative to the existing sensors. Compared to single-point sensors, the present system can provide volumetric information, which would otherwise require installation of many single point devices into the volume of the soil, not to its periphery, as in present system. The number of devices to be implemented per unit area has to be decided based on how much variation of moisture content is expected in a particular field. The deficiency of resistivity measurement in the present system limits its practical use to the measurement of relative moisture content and thus requires in-field calibration.
For a particular soil, calibration can be carried out to determine the resistance of dry soil and the resistance of soil with an adequate moisture content for a particular crop. The user has to decide what the state of dry soil is (and record those values with a press of a button), as well as record the resistance of properly irrigated soil. The frequency of this recalibration is currently determined somewhat subjectively, unless a correlation to an absolute moisture content sensor is implemented. With these two values, the measurement of relative moisture content becomes sufficient for irrigation control. It is to be determined for a particular soil and a particular field how often the calibration procedure has to be performed in order to provide sufficient accuracy for the irrigation system and remains to be a subjective decision. Correlation with an accurate single-point sensor can be utilized as well for more precise criteria on how frequently the system needs to be re-calibrated. Since all measurements are performed in real-time, it will be known when watering should be stopped. The resistance measured between every pair of electrodes on opposite electrode arrays is used to reconstruct the volumetric distribution of moisture.
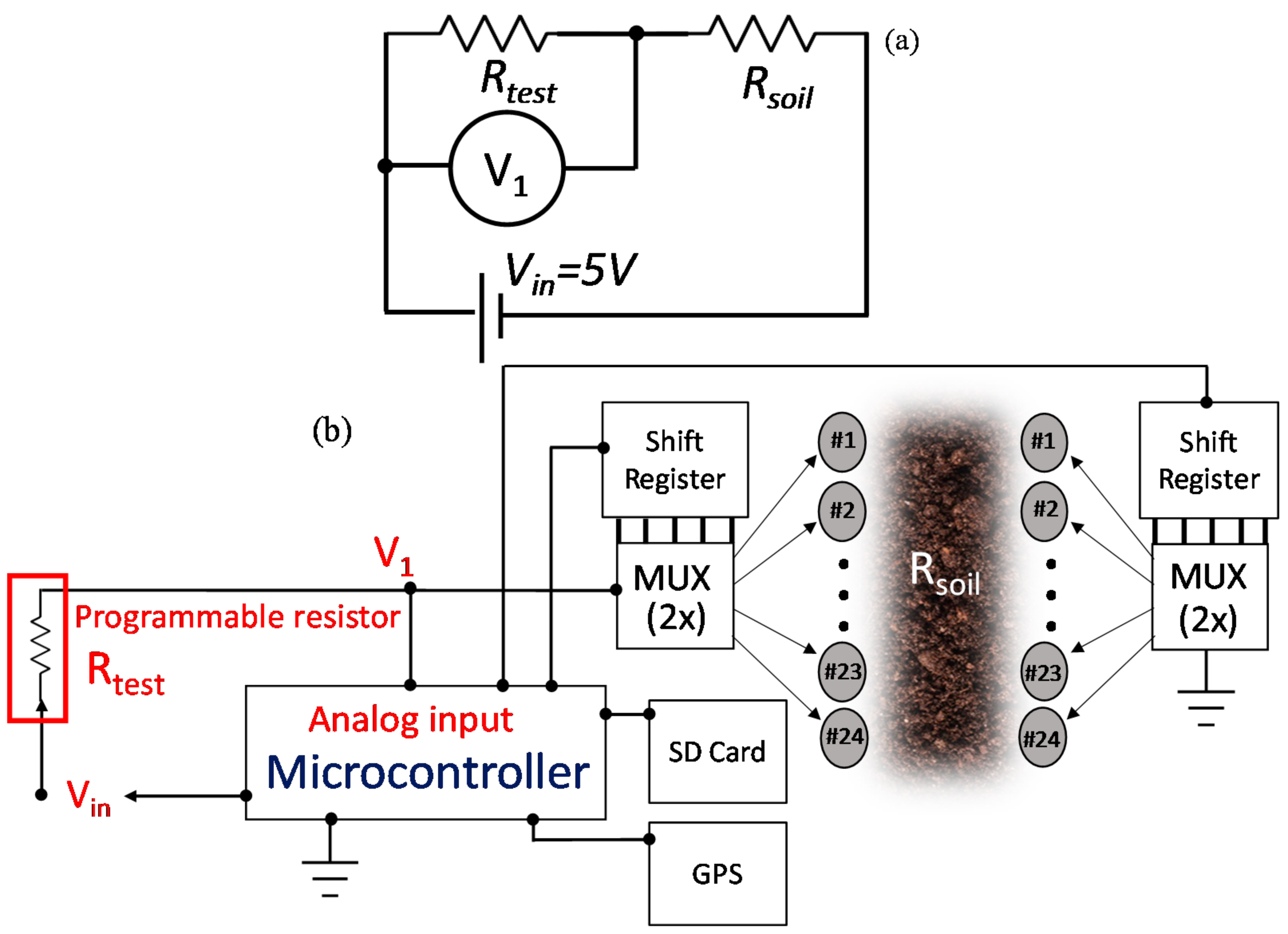
The system switches between different pairs of electrodes through the use of electronic multiplexers (as shown in
Figure 2). The soil resistance is found from the voltage drop across resistor
Rtest,—as shown in
Figure 2a—for one pair of electrodes.
Figure 2b shows the principle of resistance measurements carried out by multiple electrode pairs. A voltage drop across the programmable resistor (
Rtest) is measured by two electrodes from opposite electrode arrays that are connected to the circuit by multiplexers, which in turn are controlled by shift registers. The use of shift registers enables a large number of electrodes to be controlled by a single microcontroller. The programmable resistor is automatically optimized to improve the accuracy of the results. Resistance
Rsoil (i,j) between all pairs of electrodes is measured multiple times per second. To minimize the number of necessary microcontroller pins, a series of shift registers is used to set necessary signals for the control lines of multiplexers. Therefore, the system with a single microcontroller is scalable to large arrays, as a single microcontroller is able to sequentially switch between many electrodes.
To measure the resistance between a given pair of electrodes, the voltage drop across resistor
Rtest is measured by an analog to digital converter (e.g., the one available on an Arduino microcontroller board) as shown for one pair of electrodes in
Figure 2a. The resistance of the soil between a pair of electrodes is calculated according to the equation:
where
V1 is the measured voltage drop (in volts) across the test resistor and
Vin is the input voltage (5 V in our case). The small (several volts) voltage drop across the soil volume and the application of current for a short period of time should preclude electrolysis or charging problems within the measured volume [
27]. It is also very easy to switch the polarity in such a system by implementing an electronic relay. To optimize the accuracy of measurements, a programmable resistor is used for
Rtest, as described in
Section 2.2. All resistance measurements can be performed in a fraction of a second, followed by real-time algorithmic reconstruction of volumetric moisture distribution.
2.2. Optimization of Measurement System: Automatic Sensitivity Adjustment
The accuracy of
Rsoil measurements depends on the value of the test resistor
Rtest. The value of the test resistor needs to be optimized for specific soils and moisture conditions, which can change significantly in different environments. The system automatically adjusts
Rtest to an optimized value according to the following procedure: at a given time, the resistance value between all pairs of electrodes varies from
Rsoilmin to
Rsoilmax, which results in measured values
V1 of Equation (1), changing between
Vmax and
Vmin (all in volts). To digitize the array of resistances most precisely, this range of measured voltages should be maximized:
The range of measured voltages will be maximum when 𝐹′(𝑅
𝑡𝑒𝑠𝑡) = 0:
Since the resistance is only measured in positive values and has only one critical point for the positive values of the argument, the optimal value of
Rtest can be found from the following equation:
At the beginning of each measurement cycle, the present system determines Rsoilmax and Rsoilmin and calculates the optimal value of Rtest for the present conditions according to Equation (4). If the optimal resistance value is different from the current one, the microcontroller adjusts the nonvolatile programmable resistor Rtest to that value, enabling the most accurate measurement of soil resistance.
2.3. Volumetric Reconstruction of Moisture Content
Reconstruction of bulk resistivity values from the resistances measured between the electrode pairs requires an inversion procedure. A set of 2-dimensional inversion procedures was implemented by Brillante et al. [
25] to form a quasi-three-dimensional matrix, allowed by the multiple sets of electrodes installed through the entire volume. In the present system, the electrodes are placed only on opposite sides of the volume and therefore two-dimensional inversion cannot be implemented. A full 3D inversion procedure was not available in the present study, although in the future it can be developed by an adaptation of the existing Geotomo software tool [
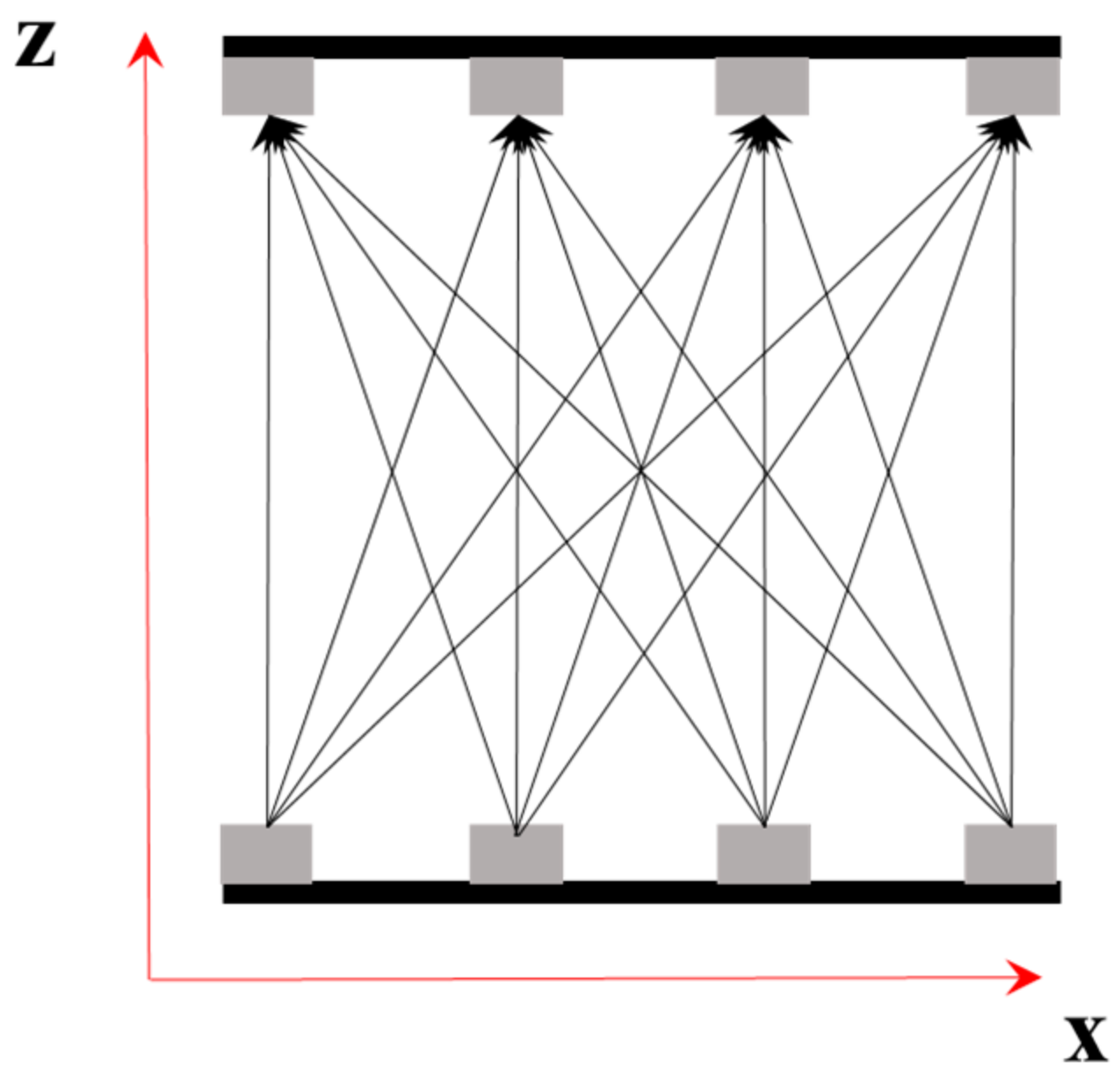
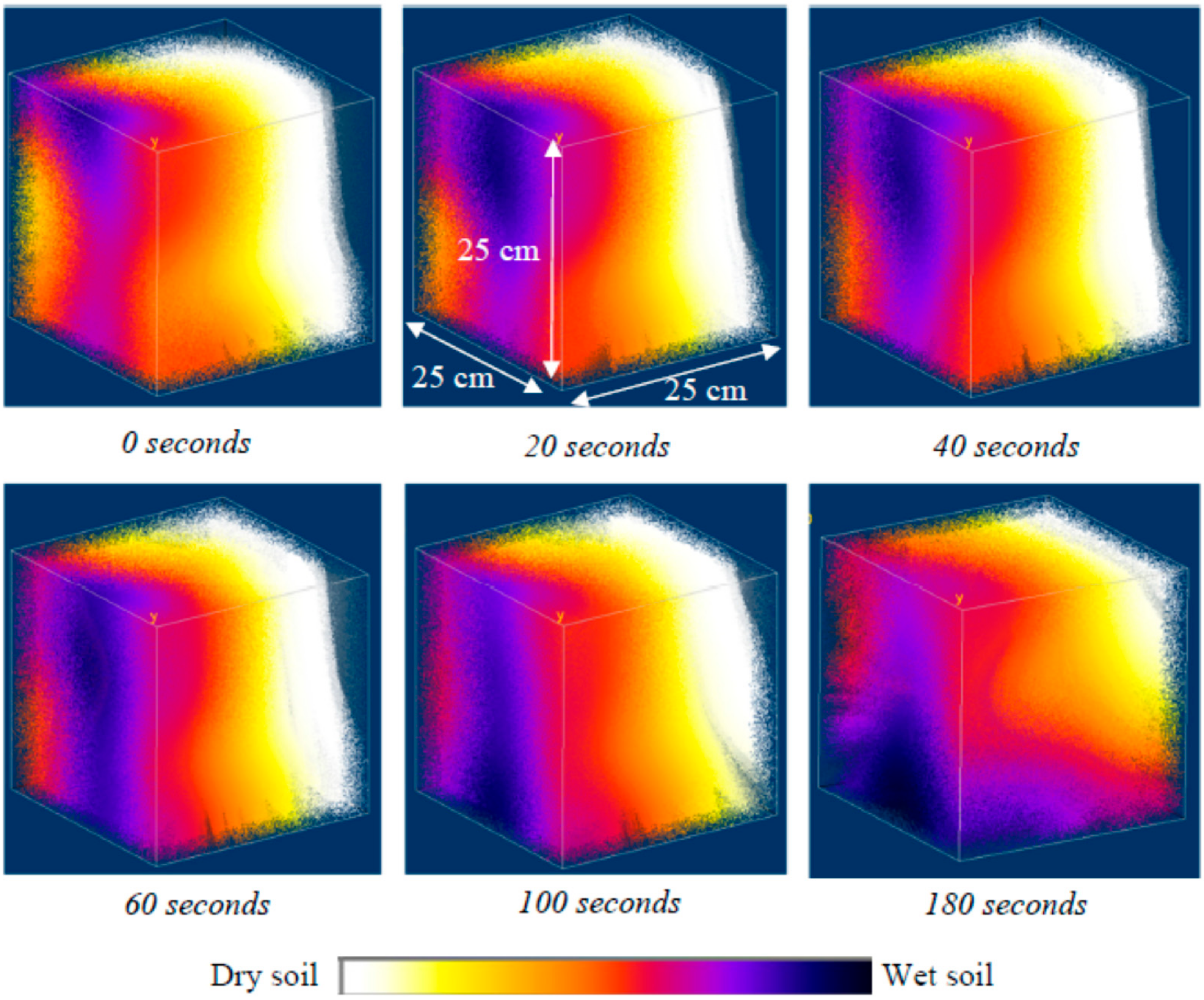
28]. A simplified, fast reconstruction method was applied in the present study, which represents the location of moisture in the studied volume (although not as precisely as in accurate analytical inversion). During approximated reconstruction, it is assumed that current flows between two electrodes in a straight line (as shown in
Figure 3), although the current flows through the entire bulk of soil. The simulation results of current flow presented in
Section 2.3.1 demonstrate the sensitivity of the linear approximation to the location of the wet region along the path between two electrodes. After all resistances between all pairs of electrodes are measured, the reconstruction algorithm is implemented before the system continues with next set of measurements. During the reconstruction procedure, the volume between two arrays of electrodes is divided into virtual cells with assigned indexes (
k,
l,
m). For a given pair of electrodes, the algorithm determines which cells are crossed by a virtual “current line” connecting electrodes. The resistance measured between that pair of electrodes is then equally divided between the subset of cells that are crossed by the virtual line. This process is repeated for all electrodes (256 pairs in present 4 × 4 electrode system). As a result, multiple values of resistance are assigned to each cell which can be crossed by multiple lines. Following that, an average resistance value in each cell (
k,
l,
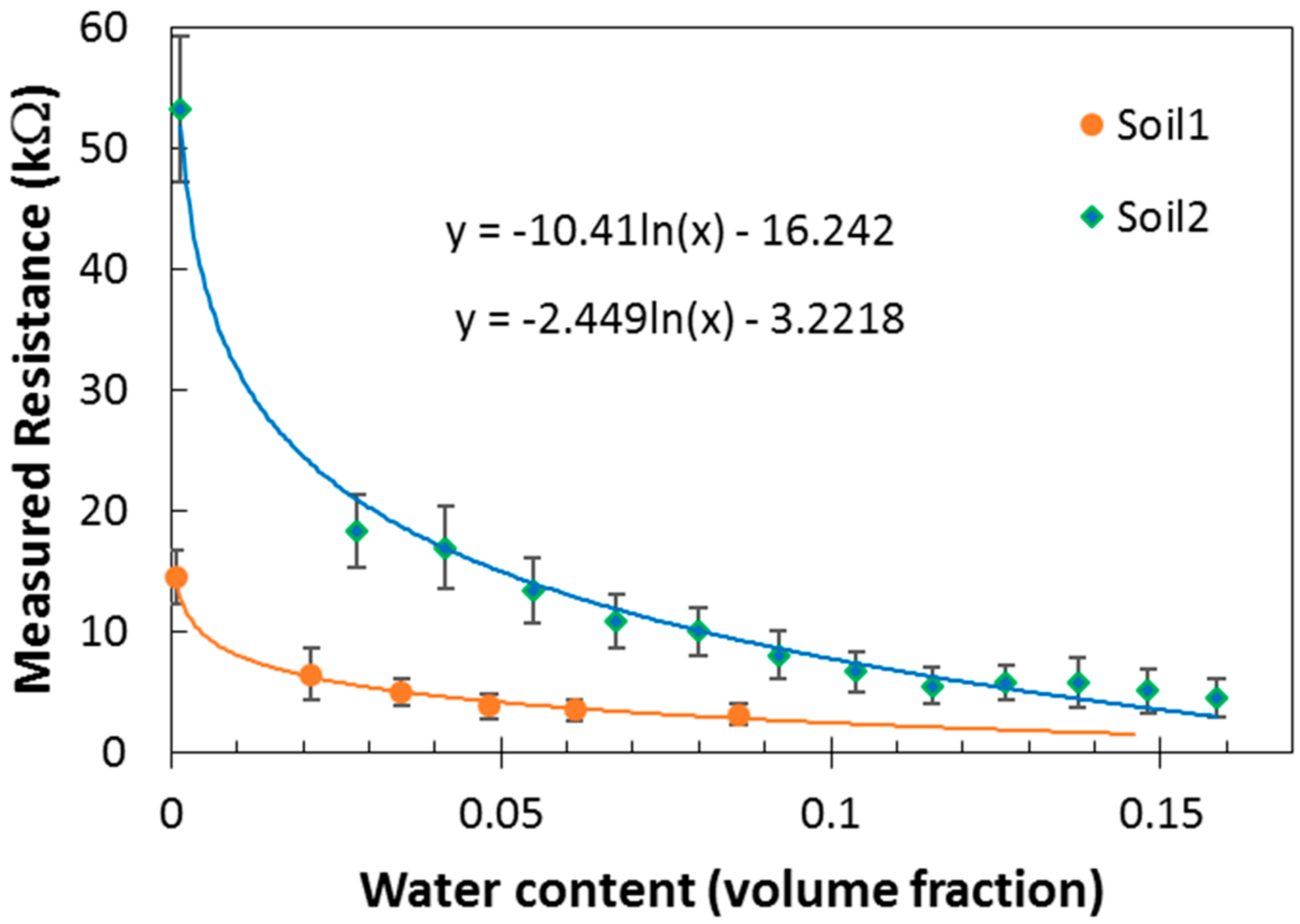
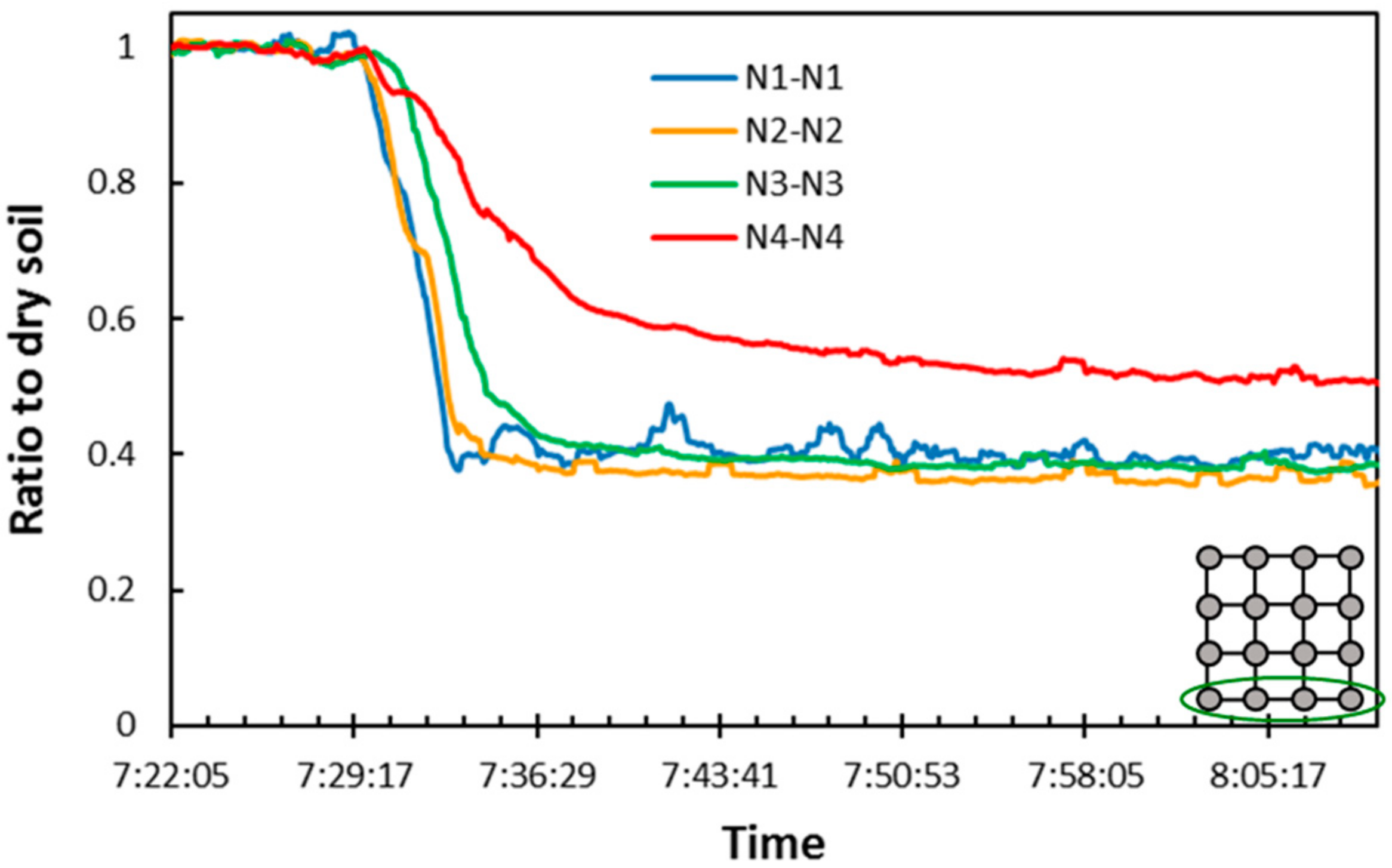
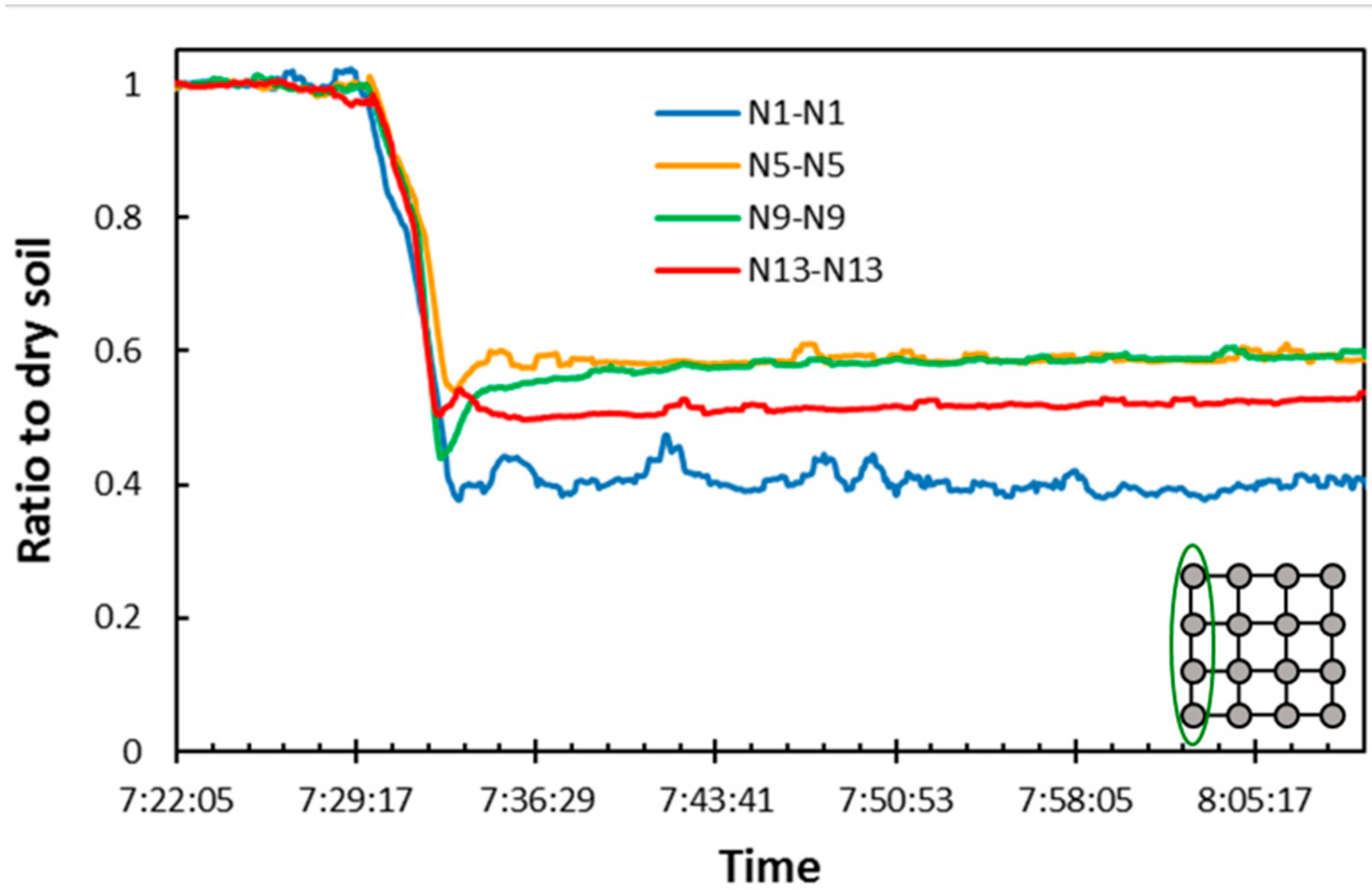
m) is calculated (averaged over all crossings over a particular cell). These values are sent out and stored on the local SD card. The resulting three-dimensional distribution of resistances is correlated to the volumetric distribution of moisture content, as soil becomes more conductive with increased water concentration (as shown in
Section 3.1).
The absolute values of moisture content can be calibrated for any particular type of soil (as shown in
Section 3.1). Alternatively, in practical use, irrigation control system need to determine when soil is dry and should be irrigated, as well as when to stop irrigation. The decision on when to start watering in a particular irrigation pipe and when to stop it does not require knowledge of resistance values but can rather be based on the comparison of the current resistance to the resistance of dry and wet soils. After installing the electrode sets, the user must do only two simple calibration measurements to find the resistance of dry soil and wet soil. With that simple calibration, all results can be shown in real time as a ratio of current values to the resistance of dry soil. The calibration has to be repeated at certain intervals, depending on the variation of soil salinity as the season progresses, application of fertilizers and other factors. After the user decides what soil conditions correspond to dryness, the program remembers these conditions as a baseline. Similarly, it can be defined when soil is properly irrigated. Another alternative solution for the inaccuracies of resistance-based volumetric measurements can be the correlation of measured values with the measurements of one accurate single-point sensor which is not affected by environmental and soil composition factors, such as a time domain reflectometry device.
2.3.1. Computer Simulation of Electrical Current Flow Pattern. Validity Check of Linear Approximation Used in Reconstruction of Volume Resistivity
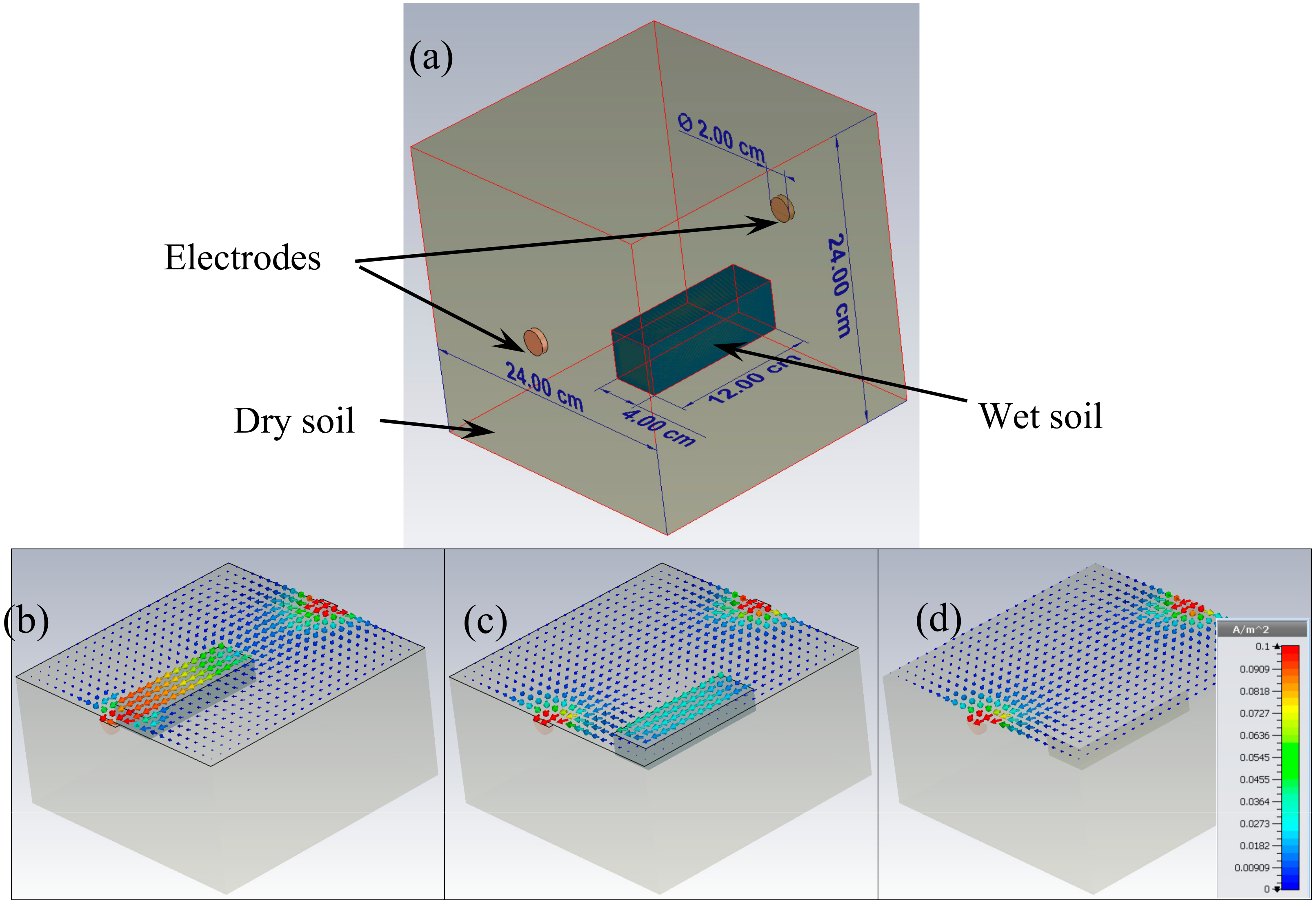
The approximated procedure used for the tomographic reconstruction of volumetric distribution assumes that most electrical current flows along the linear path connecting two electrodes. A computer simulation model of three-dimensional current flow is used to estimate the variation of effective resistance between two electrodes in two cases, when a wet soil region is placed in a direct path between two electrodes and when it is placed away from it, as shown in
Figure 4a. The Computer Simulation Technology Studio Suite software is used for the simulation. An electroquasistatic solver in the low frequency domain of the CST Studio Suit with a tetrahedral mesh (with an adaptive mesh refinement) was used for the simulation of the soil region consisting of dry soil with an inclusion of a wet region. A cube of uniform conduction (representing a dry soil) contains two metal (copper) electrodes located on the opposite sides. A smaller volume with a higher conductivity value is placed in a direct path between two electrodes (as shown in
Figure 4b), as well as farther away from the direct line between the electrodes (
Figure 4c) and no wet region is modeled in
Figure 4d. The resistance between the two electrodes is calculated to be 15.312 kΩ for case (b), 16.33 KΩ for case (c) and 16.498 KΩ for case (d), respectively (as shown in
Figure 4). For a cube containing only wet soil, the resistance would be measured as 164 Ω. Cross sections of the simulated volume include arrows that indicate the value of conduction current density (
Figure 4b,d). It is demonstrated that in the first case, a larger conduction current (and thus lower resistance) should be measured providing some sensitivity to the location of the wet soil within the cube. Although these results do not explicitly confirm that linear approximation can be used for the tomographic reconstruction, the experimental results presented in the next section demonstrate the capability of the present device to visualize the location within the volume that has higher moisture content due to the application of water.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











