
Automated Student Classroom Behaviors’ Perception and Identification Using Motion Sensors

 ,
,  ,
,  ,
,  ,
,
Abstract
:1. Introduction
1.1. Background Information on Students’ Classroom Behavior
1.2. Literature Review
1.2.1. Existing Methods and the Limitations
1.2.2. Advanced Methods on Human Activity Recognition
1.3. Contributions and Structure
2. Materials and Methods
2.1. Participants
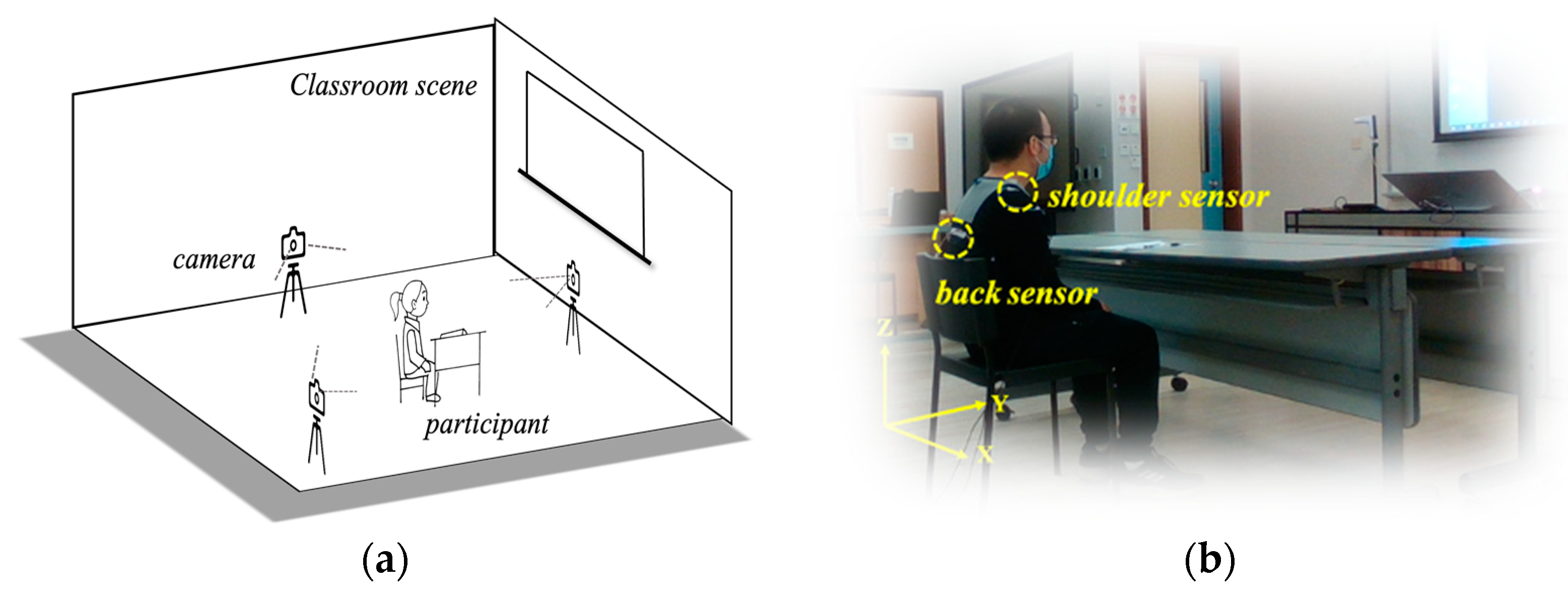
2.2. Experimental Design
2.3. Experiment Data Introduction
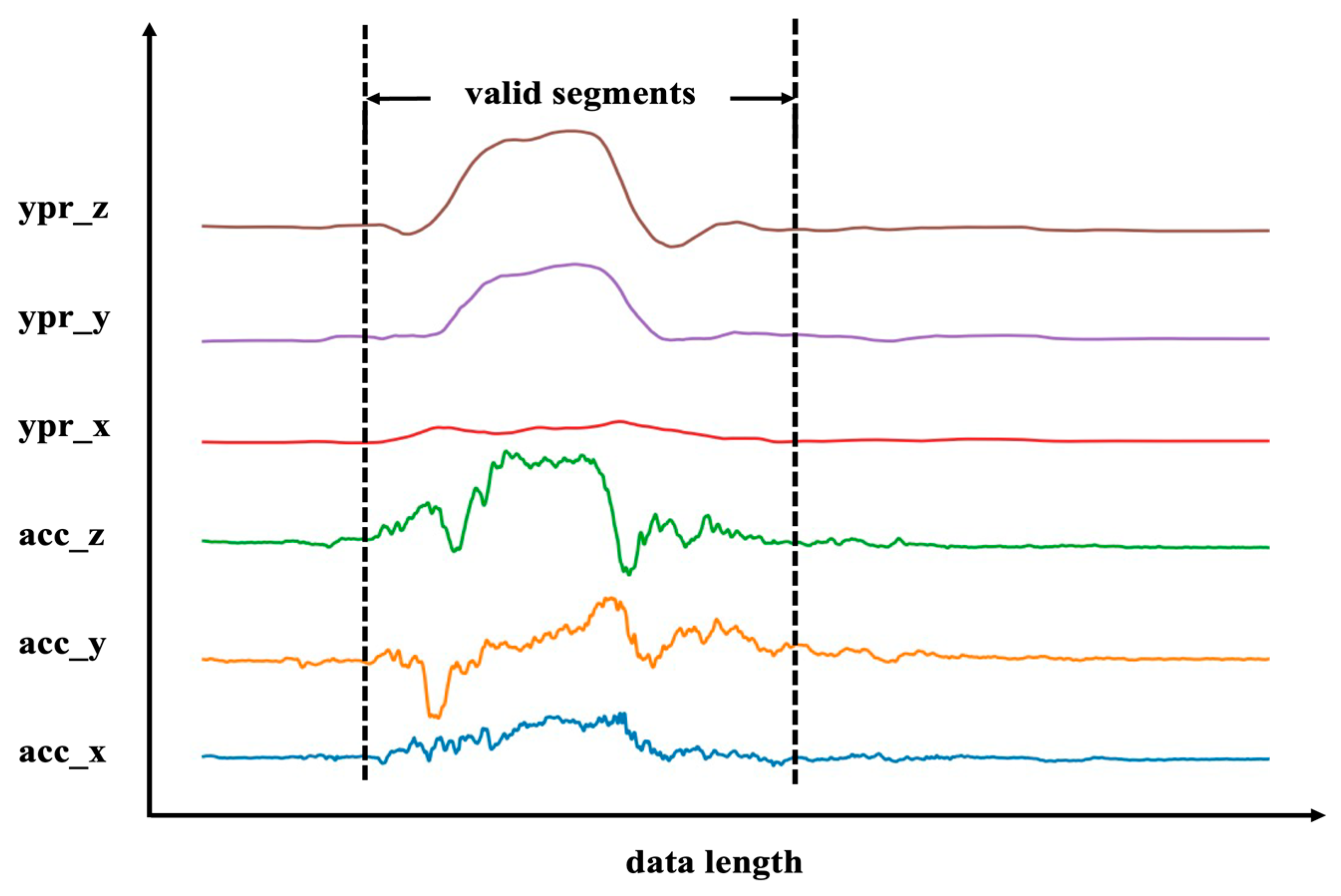
2.3.1. Multiple Channel Data Display
2.3.2. Display of Different Motions of the Same Participant
2.3.3. Display of Different Participants with the Same Motion
2.4. Identification Algorithm
2.4.1. Voting-Based DTW (VB-DTW) Valid Segment Extraction Algorithm
| Algorithm 1: Voting-Based DTW (VB-DTW) valid segment extraction algorithm |
| Input: |
| ; |
| . |
| Initialization: |
| voting set = |
| 1: while do |
| 2: |
| 3: end while |
| 4: |
| 5: while do |
| 6: for do |
| 7: count 0 |
| 8: if then |
| 9: |
| then |
| 12: |
| 13: end while |
| 14: for do |
| 15: if then |
| 16: |
| 17: |
| Output: |
| ; |
| . |
2.4.2. Data Augmentation
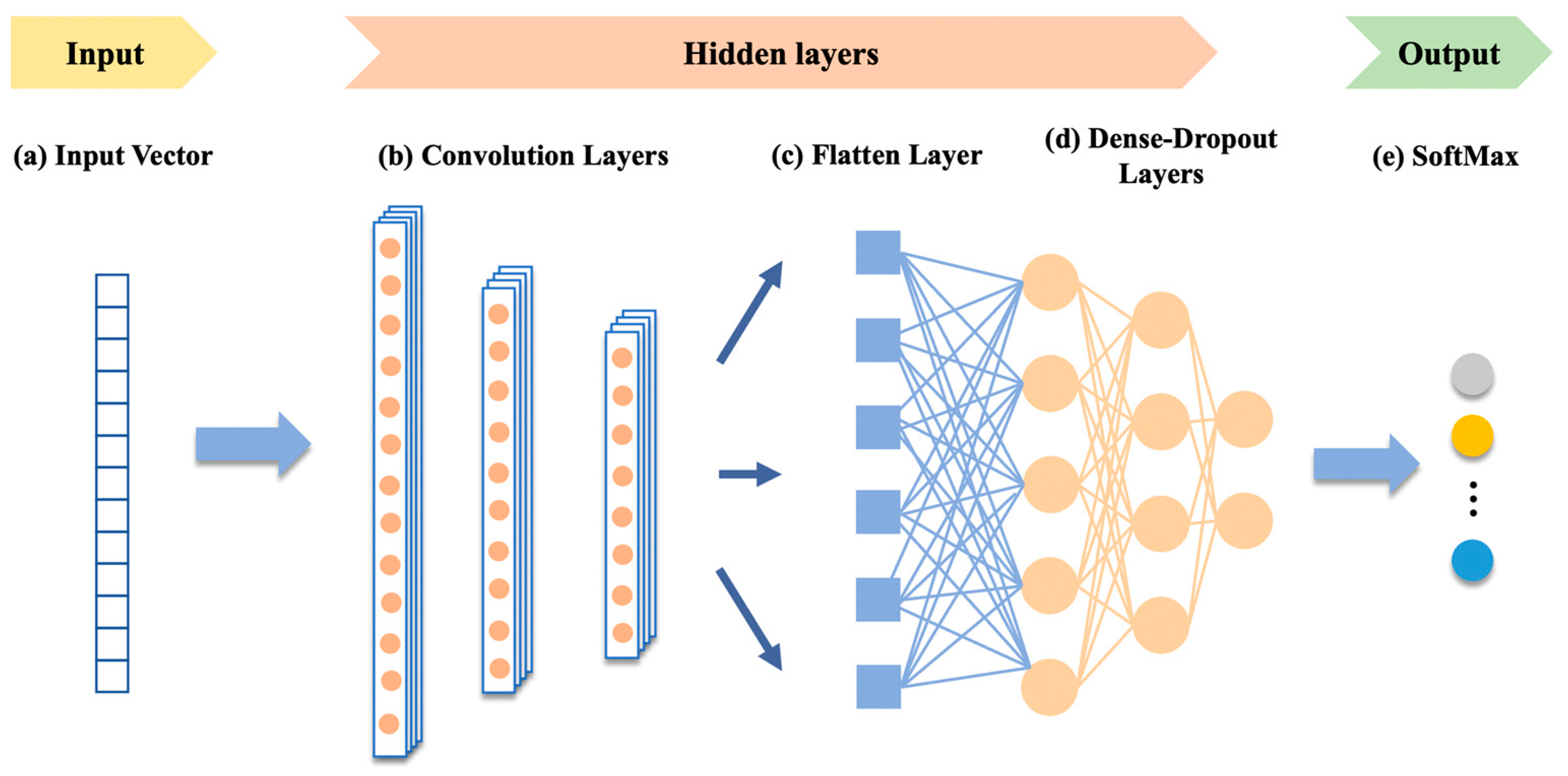
2.4.3. Deep Learning-Based Classification Algorithm
- (1)
- LSTM and BiLSTM
- (2)
- 1DCNN
2.4.4. Evaluation Metrics
- (1)
- Valid Segments Extraction
- (2)
- Motion Identification
3. Results
3.1. Identification Algorithm Valid Segmentation Results
3.2. Motion Identification Results
4. Discussion
4.1. Ablation Study
4.1.1. Effect of VB-DTW Valid Segment Extraction
4.1.2. Effect of VB-DTW Augmentation
4.2. Limitation of the Proposed Method
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, Z.-T.; Yu, M.-H.; Riezebos, P.J.S.l.e. A research framework of smart education. Smart Learn. Environ. 2016, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Shoikova, E.; Nikolov, R.; Kovatcheva, E. Smart digital education enhanced by AR and IoT data. In Proceedings of the 12th International Technology, Education and Development Conference (INTED), Valencia, Spain, 5–7 March 2018; pp. 5–7. [Google Scholar]
- Atabekov, A. Internet of things-based smart classroom environment: Student research abstract. In Proceedings of the 31st Annual ACM Symposium on Applied Computing, 2016, Pisa Italy, 4–8 April 2016; pp. 746–747. [Google Scholar]
- Zhan, Z.; Wu, Q.; Lin, Z.; Cai, J. Smart classroom environments affect teacher-student interaction: Evidence from a behavioural sequence analysis. Australas. J. Educ. Technol. 2021, 37, 96–109. [Google Scholar] [CrossRef]
- Alghamdi, A.; Karpinski, A.C.; Lepp, A.; Barkley, J. Online and face-to-face classroom multitasking and academic performance: Moderated mediation with self-efficacy for self-regulated learning and gender. Comput. Hum. Behav. 2020, 102, 214–222. [Google Scholar] [CrossRef]
- Brandmiller, C.; Dumont, H.; Becker, M.J.C.E.P. Teacher perceptions of learning motivation and classroom behavior: The role of student characteristics. Contemp. Educ. Psychol. 2020, 63, 101893. [Google Scholar] [CrossRef]
- Khan, A.; Ghosh, S.K. Student performance analysis and prediction in classroom learning: A review of educational data mining studies. Educ. Inf. Technol. 2020, 26, 205–240. [Google Scholar] [CrossRef]
- Hopman, J.A.B.; Tick, N.T.; van der Ende, J.; Wubbels, T.; Verhulst, F.C.; Maras, A.; Breeman, L.D.; van Lier, P.A.C. Special education teachers’ relationships with students and self-efficacy moderate associations between classroom-level disruptive behaviors and emotional exhaustion. Teach. Teach. Educ. 2018, 75, 21–30. [Google Scholar] [CrossRef]
- Iadarola, S.; Shih, W.; Dean, M.; Blanch, E.; Harwood, R.; Hetherington, S.; Mandell, D.; Kasari, C.; Smith, T. Implementing a Manualized, Classroom Transition Intervention for Students with ASD in Underresourced Schools. Behav. Modif. 2018, 42, 126–147. [Google Scholar] [CrossRef] [PubMed]
- Li, R.; Fu, H.; Zheng, Y.; Lo, W.L.; Yu, J.; Sit, H.P.; Chi, Z.R.; Song, Z.X.; Wen, D.S. Automated fine motor evaluation for developmental coordination disorder. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 963–973. [Google Scholar] [CrossRef]
- Zablotsky, B.; Black, L.I.; Maenner, M.J.; Schieve, L.A.; Danielson, M.L.; Bitsko, R.H.; Blumberg, S.J.; Kogan, M.D.; Boyle, C.A. Prevalence and Trends of Developmental Disabilities among Children in the United States: 2009–2017. Pediatrics 2019, 144, e20190811. [Google Scholar] [CrossRef]
- Johnson, K.A.; White, M.; Wong, P.S.; Murrihy, C. Aspects of attention and inhibitory control are associated with on-task classroom behaviour and behavioural assessments, by both teachers and parents, in children with high and low symptoms of ADHD. Child Neuropsychol. 2020, 26, 219–241. [Google Scholar] [CrossRef] [PubMed]
- Dilmurod, R.; Fazliddin, A. Prospects for the introduction of artificial intelligence technologies in higher education. ACADEMICIA Int. Multidiscip. Res. J. 2021, 11, 929–934. [Google Scholar] [CrossRef]
- Jo, J.; Park, K.; Lee, D.; Lim, H. An Integrated Teaching and Learning Assistance System Meeting Requirements for Smart Education. Wirel. Pers. Commun. 2014, 79, 2453–2467. [Google Scholar] [CrossRef]
- Singh, H.; Miah, S.J. Smart education literature: A theoretical analysis. Educ. Inf. Technol. 2020, 25, 3299–3328. [Google Scholar] [CrossRef]
- Lekwa, A.J.; Reddy, L.A.; Shernoff, E.S. Measuring teacher practices and student academic engagement: A convergent validity study. Sch. Psychol. Q. 2019, 34, 109–118. [Google Scholar] [CrossRef] [PubMed]
- Porter, L. Student Behaviour: Theory and Practice for Teachers; Routledge: London, UK, 2020. [Google Scholar]
- McMichan, L.; Gibson, A.M.; Rowe, D.A. Classroom-based physical activity and sedentary behavior interventions in adolescents: A systematic review and meta-analysis. J. Phys. Act. Health 2018, 15, 383–393. [Google Scholar] [CrossRef] [Green Version]
- Cox, S.K.; Root, J.R. Modified Schema-Based Instruction to Develop Flexible Mathematics Problem-Solving Strategies for Students with Autism Spectrum Disorder. Remedial Spec. Educ. 2018, 41, 139–151. [Google Scholar] [CrossRef]
- Bertel, L.B.; Nørlem, H.L.; Azari, M. Supporting Self-Efficacy in Children with ADHD through AI-supported Self-monitoring: Initial Findings from a Case Study on Tiimood. In Proceedings of the Adjunct 15th International Conference on Persuasive Technology, Aalborg, Denmark, 20–23 April 2020. [Google Scholar]
- Kok, V.J.; Lim, M.K.; Chan, C.S. Crowd behavior analysis: A review where physics meets biology. Neurocomputing 2016, 177, 342–362. [Google Scholar] [CrossRef] [Green Version]
- Zheng, R.; Jiang, F.; Shen, R. Intelligent student behavior analysis system for real classrooms. In Proceedings of the ICASSP 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 9244–9248. [Google Scholar]
- Saini, M.K.; Goel, N. How Smart Are Smart Classrooms? A Review of Smart Classroom Technologies. ACM Comput. Surv. 2020, 52, 1–28. [Google Scholar] [CrossRef] [Green Version]
- Kabudi, T.; Pappas, I.; Olsen, D.H.J.C.; Intelligence, E.A. AI-enabled adaptive learning systems: A systematic mapping of the literature. Comput. Educ. Artif. Intell. 2021, 2, 100017. [Google Scholar] [CrossRef]
- Chen, K.; Zhang, D.; Yao, L.; Guo, B.; Yu, Z.; Liu, Y. Deep Learning for Sensor-based Human Activity Recognition. ACM Comput. Surv. 2022, 54, 1–40. [Google Scholar] [CrossRef]
- Beddiar, D.R.; Nini, B.; Sabokrou, M.; Hadid, A. Vision-based human activity recognition: A survey. Multimed. Tools Appl. 2020, 79, 30509–30555. [Google Scholar] [CrossRef]
- Bour, P.; Cribelier, E.; Argyriou, V. Crowd behavior analysis from fixed and moving cameras. In Multimodal Behavior Analysis in the Wild; Elsevier: Amsterdam, The Netherlands, 2019; pp. 289–322. [Google Scholar]
- Grant, J.M.; Flynn, P.J. Crowd Scene Understanding from Video. ACM Trans. Multimed. Comput. Commun. Appl. 2017, 13, 1–23. [Google Scholar] [CrossRef]
- Sreenu, G.; Durai, S.J.J.o.B.D. Intelligent video surveillance: A review through deep learning techniques for crowd analysis. Big Data 2019, 6, 48. [Google Scholar] [CrossRef]
- Nguyen, T.-H.-C.; Nebel, J.-C.; Florez-Revuelta, F.J.S. Recognition of activities of daily living with egocentric vision: A review. Sensors 2016, 16, 72. [Google Scholar] [CrossRef]
- Prati, A.; Shan, C.; Wang, K.I.K. Sensors, vision and networks: From video surveillance to activity recognition and health monitoring. J. Ambient. Intell. Smart Environ. 2019, 11, 5–22. [Google Scholar]
- Michail, K.; Deliparaschos, K.M.; Tzafestas, S.G.; Zolotas, A.C. AI-based actuator/sensor fault detection with low computational cost for industrial applications. IEEE Trans. Control. Syst. Technol. 2015, 24, 293–301. [Google Scholar] [CrossRef] [Green Version]
- Alani, A.A.; Cosma, G.; Taherkhani, A. Classifying imbalanced multi-modal sensor data for human activity recognition in a smart home using deep learning. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), online, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Kavuncuoğlu, E.; Uzunhisarcıklı, E.; Barshan, B.; Özdemir, A.T.J.D.S.P. Investigating the Performance of Wearable Motion Sensors on recognizing falls and daily activities via machine learning. Digit. Signal Process. 2022, 126, 103365; [Google Scholar] [CrossRef]
- Li, H.; Liu, J.; Yang, Z.; Liu, R.W.; Wu, K.; Wan, Y. Adaptively constrained dynamic time warping for time series classification and clustering. Inf. Sci. 2020, 534, 97–116. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Zhou, P.; Shi, W.; Tian, J.; Qi, Z.; Li, B.; Hao, H.; Xu, B. Attention-based bidirectional long short-term memory networks for relation classification. In Proceedings of the Proceedings of the 54th annual meeting of the association for computational linguistics (volume 2: Short papers), Berlin, Germany, 7–12 August 2016; pp. 207–212. [Google Scholar]
- Cho, H.; Yoon, S.M.J.S. Divide and conquer-based 1D CNN human activity recognition using test data sharpening. Sensors 2018, 18, 1055. [Google Scholar] [CrossRef] [PubMed]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Kiranyaz, S.; Ince, T.; Abdeljaber, O.; Avci, O.; Gabbouj, M. 1-D convolutional neural networks for signal processing applications. In Proceedings of the ICASSP 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, Great Britain, 12–17 May 2019; pp. 8360–8364. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial No. | Motion Mode |
|---|---|
| 1 | Sitting still |
| 2 | Lying on the desktop |
| 3 | Writing notes |
| 4 | Raising a hand in the seat |
| 5 | Turning around and looking around |
| 6 | Raising a hand while standing up |
| 7 | Rocking on the seat |
| 8 | Standing up and sitting down |
| 9 | Wandering and trunk rotation |
| 10 | Playing hands |
| 11 | Turning pen in hand |
| 12 | Knocking on the desktop |
| 13 | Leaning the body and chatting |
| 14 | Shaking legs |
| Motion Mode | Jaccard Index |
|---|---|
| Raising a hand in the seat | 0.97 |
| Turning around and looking around | 0.96 |
| Raising hand while standing up | 0.96 |
| Rocking on the seat | 0.97 |
| Stand up and sit down | 0.97 |
| Wandering and trunk rotation | 0.98 |
| Playing hands | 0.87 |
| Turning pen in hand | 0.88 |
| Knocking on the desktop | 0.95 |
| Leaning the body and chat | 0.96 |
| Shaking legs | 0.94 |
| Lying on the desktop | 0.45 |
| Writing notes | 0.50 |
| Back | Shoulder | |||||
|---|---|---|---|---|---|---|
| Accuracy (%) | acc | ypr | acc + ypr | acc | ypr | acc + ypr |
| DNN | 81.8 | 91.2 | 93.3 | 89.5 | 86.5 | 91.7 |
| LSTM | 66.5 | 84 | 96.4 | 81.3 | 81.6 | 89.2 |
| BiLSTM | 96 | 98 | 99.8 | 96.4 | 95.9 | 97.2 |
| 1DCNN | 99.8 | 99.9 | 100 | 99.6 | 98.3 | 98.8 |
| With VB-DTW Valid Segment Extraction | Without VB-DTW Valid Segment Extraction | Improvement by VB-DTW | ||||
|---|---|---|---|---|---|---|
| Accuracy (%) | Back | Shoulder | Back | Shoulder | Back | Shoulder |
| DNN | 93.3 | 91.7 | 89.6 | 82.5 | 3.7↑ | 9.2↑ |
| LSTM | 96.4 | 89.2 | 92.1 | 85.2 | 4.3↑ | 4.0↑ |
| BiLSTM | 99.8 | 97.2 | 93.8 | 90.2 | 5.0↑ | 7.0↑ |
| 1DCNN | 100 | 98.8 | 98.5 | 95.9 | 1.5↑ | 2.9↑ |
| With VB-DTW Augmentation | Without VB-DTW Augmentation | Improvement by VB-DTW | ||||
|---|---|---|---|---|---|---|
| Accuracy (%) | Back | Shoulder | Back | Shoulder | Back | Shoulder |
| DNN | 93.3 | 91.7 | 41.2 | 39.0 | 52.1↑ | 52.7↑ |
| LSTM | 96.4 | 89.2 | 49.5 | 51.1 | 46.9↑ | 38.1↑ |
| BiLSTM | 99.8 | 97.2 | 52.8 | 51.1 | 47.0↑ | 46.1↑ |
| 1DCNN | 100 | 98.8 | 53.8 | 52.1 | 46.2↑ | 46.7↑ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Gao, C.; Fu, H.; Ma, C.Z.-H.; Wang, Q.; He, Z.; Li, M. Automated Student Classroom Behaviors’ Perception and Identification Using Motion Sensors. Bioengineering 2023, 10, 127. https://doi.org/10.3390/bioengineering10020127
Wang H, Gao C, Fu H, Ma CZ-H, Wang Q, He Z, Li M. Automated Student Classroom Behaviors’ Perception and Identification Using Motion Sensors. Bioengineering. 2023; 10(2):127. https://doi.org/10.3390/bioengineering10020127
Chicago/Turabian StyleWang, Hongmin, Chi Gao, Hong Fu, Christina Zong-Hao Ma, Quan Wang, Ziyu He, and Maojun Li. 2023. "Automated Student Classroom Behaviors’ Perception and Identification Using Motion Sensors" Bioengineering 10, no. 2: 127. https://doi.org/10.3390/bioengineering10020127