
Geometric Parameter Identification of Medical Robot Based on Improved Beetle Antennae Search Algorithm


Abstract
:1. Introduction
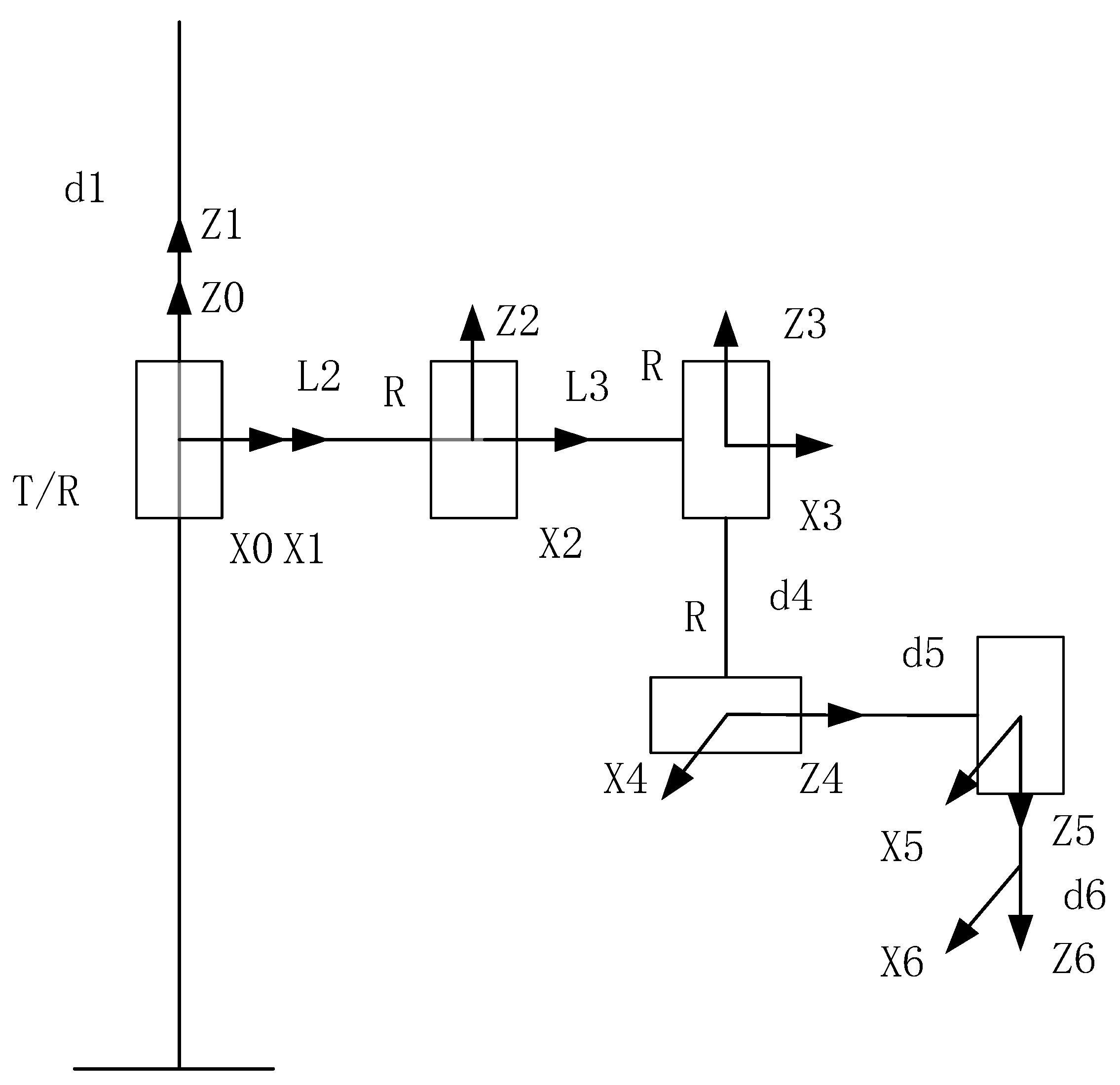
2. DH Model Building
- (1)
- CT-scan the marker points and target points on the skull model.
- (2)
- Initialization of BH-7 robot: Turn on the network cable and the power supply; open the visual recognition program, and use the stereo camera to calibrate the marker plates on each joint of the BH-7 robot in different states of motion to calculate error.
- (3)
- Surgical planning: The CT images of the skull model from the hospital are reconstructed in 3D, and the appropriate number of marker points and target points are marked on the images.
- (4)
- Marker point registration: The cranial model after the CT scan is placed in the working space of the BH-7 robot. The marker points are marked by the surgical planning program as well as the visual recognition program. The registration error of the marker points is then calculated.
- (5)
- Stereotactic surgery by BH-7 robot: After marker point registration, simulated surgery is performed, and the mechanical arm of the BH-7 robot moves according to the simulated trajectory under the premise of trajectory safety. It points the puncture needle at the surgical target, at which time the distance between the real target and the manually measured puncture needle is the error in the accuracy of end positioning of the BH-7 robot.
3. Improved Beetle Antennae Search Algorithm
3.1. Improving Search Mode of BAS
3.1.1. Introduction to VSBAS
3.1.2. WCA Random Wandering Behavior
3.1.3. Wandering Antennae Improvement
3.2. Improving Mechanism of Selection of Global Optimal Solution of BAS
3.2.1. Metropolis Guidelines
- (1)
- Treat the randomly generated x as the optimal solution.
- (2)
- Obtain a new solution near the initial solution xt, ∆f = f (xt) − f (x).
- (3)
- Determine whether to choose the new solution xt by min {1, exp (−∆f/Tk)} > random, where Tk is the current temperature and exp is an exponential function with a natural number e as its base.
3.2.2. Global Optimal Solution Selection Mode Improvement
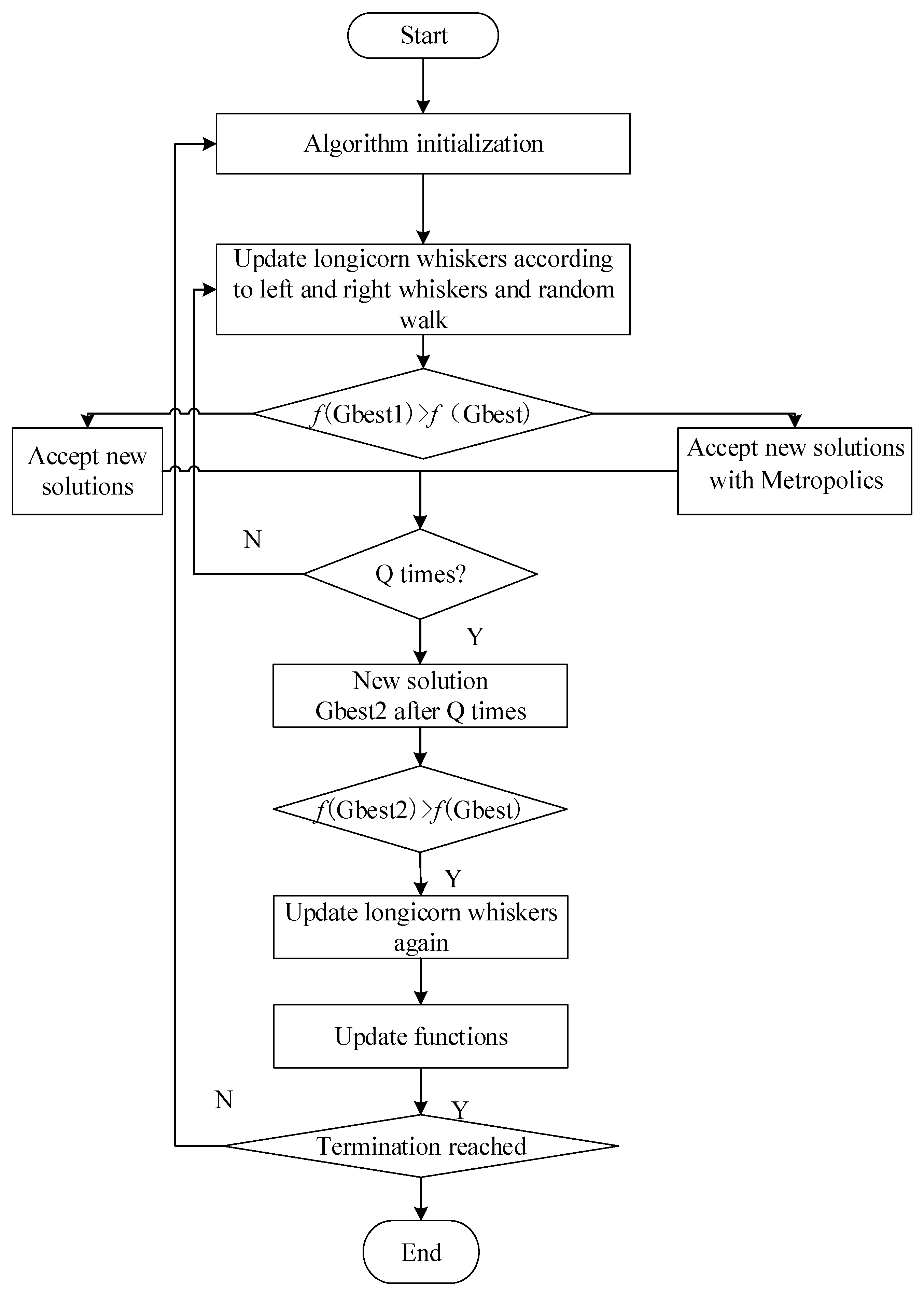
3.3. Calibration Process of Geometric Parameters
- (1)
- Initialize the algorithm.
- (2)
- Obtain the adaptation values of the left and right antennae of the algorithm, and of the “wandering antenna.”
- (3)
- Update the step size of the algorithm according to Equation (5) to improve the accuracy of identification of the geometric parameters.
- (4)
- The outer loop starts, and the algorithm enters the inner loop first, with Q cycles.
- (5)
- The global optimal solution is selected according to the metropolis criterion of the simulated annealing algorithm.
- (6)
- At the end of Q iterations of the inner loop, the search is performed again by probing the wandering antenna, and the left and right antennae. The global optimal solution is updated by merit.
- (7)
- If the algorithm does not satisfy the termination condition, go to step 2; otherwise, the algorithm stops iterating and the corresponding parameters are used to calibrate the geometric error of the robot.
4. Experiments and Results
4.1. Posture Generation
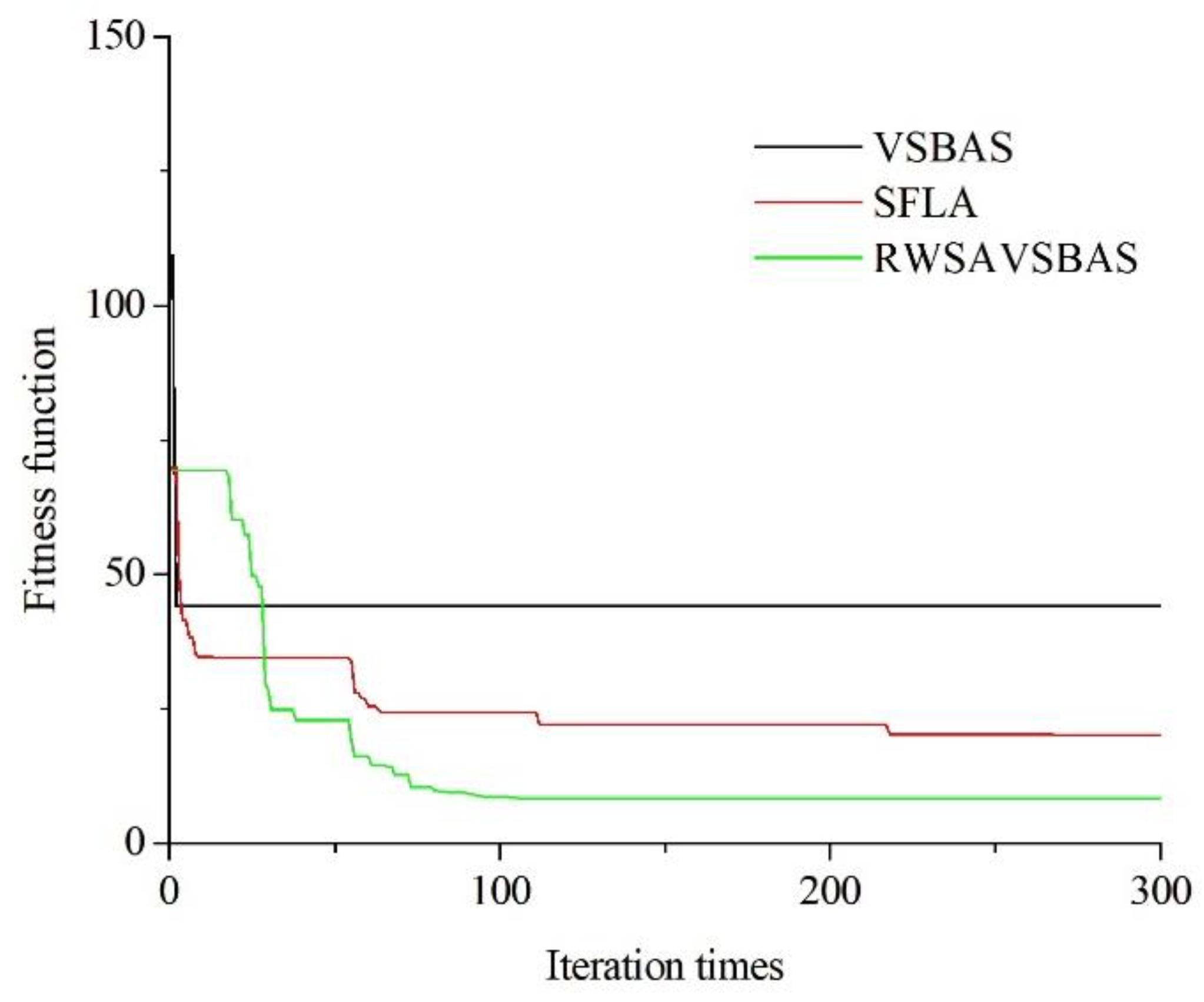
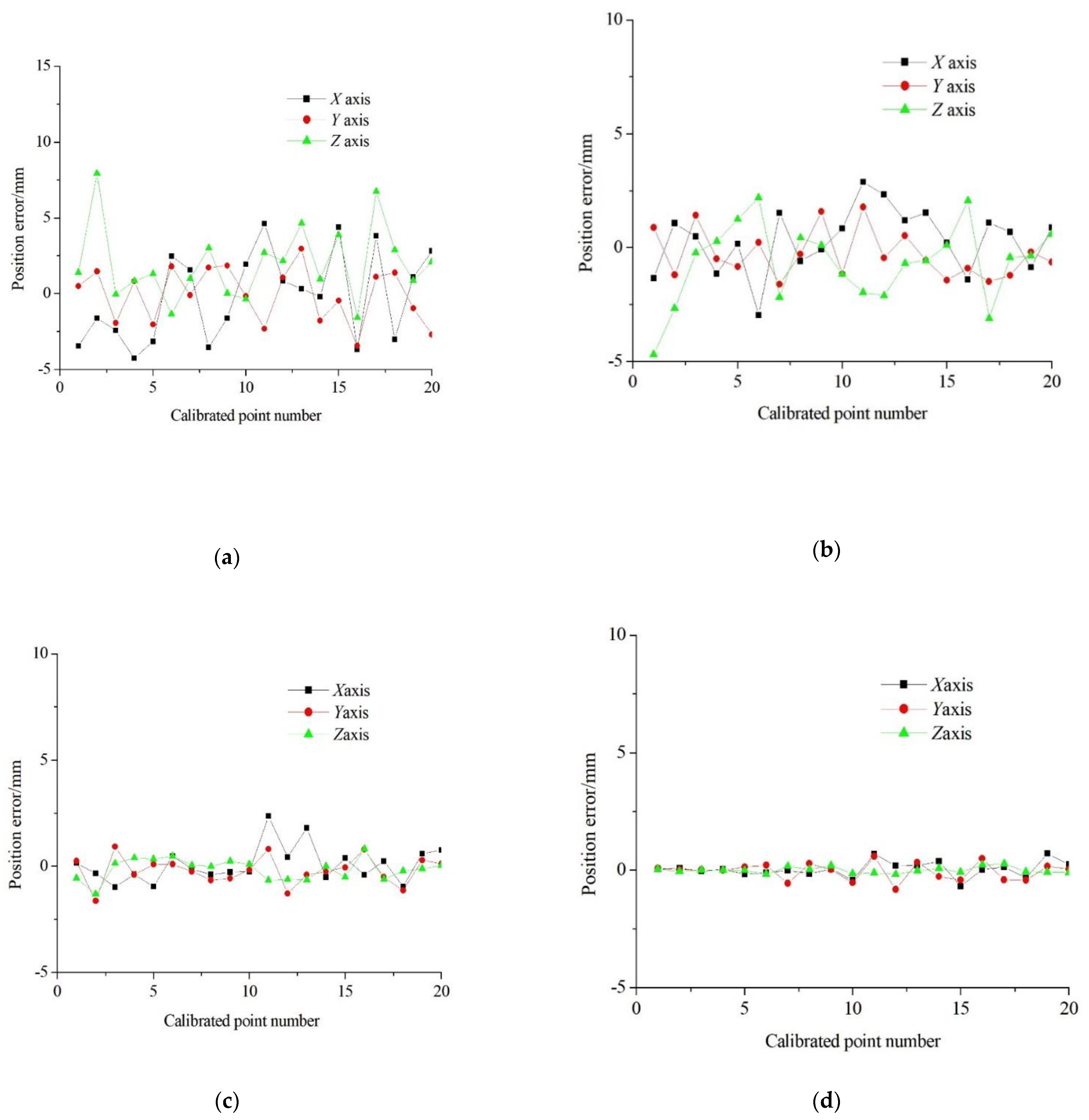
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qi, W.; Ovur, S.E.; Li, Z.; Marzullo, A.; Song, R. Multi-sensor Guided Hand Gestures Recognition for Teleoperated Robot using Recurrent Neural Network. IEEE Robot. Autom. Lett. 2021, 6, 6039–6045. [Google Scholar] [CrossRef]
- Qi, W.; Su, H.; Aliverti, A. A Smartphone-based Adaptive Recognition and Real-time Monitoring System for Human Activities. IEEE Trans. Hum.-Mach. Syst. 2020, 50, 414–423. [Google Scholar] [CrossRef]
- Taylor, R.H. A perspective on medical robotic. Proc. IEEE 2006, 94, 1652–1664. [Google Scholar] [CrossRef]
- Taylor, R.H.; Kazanzides, P. Medical Robotics and Computer-Integrated Interventional Medicine. Adv. Comput. 2008, 73, 219–260. [Google Scholar]
- Taylor, R.H.; Stoianovici, D. Medical robotics in computer-integrated surgery. IEEE Trans. Robot. Autom. 2003, 19, 765–781. [Google Scholar] [CrossRef]
- Chen, Y.; Dong, F. Robot machining recent development and future research issues. Int. J. Adv. Manuf. Technol. 2013, 66, 1489. [Google Scholar] [CrossRef] [Green Version]
- Chen, G.; Li, T.; Chu, M.; Jia, Q.X.; Xu, S.H. Review on kinematics cali-bration technology of serial robots. Int. J. Precis. Eng. Manuf. 2014, 15, 1759. [Google Scholar] [CrossRef]
- Veitschegger, W.K.; Wu, C.H. Robot calibration and compensation. IEEE J. Robot. Autom. 1988, 4, 643. [Google Scholar] [CrossRef]
- Wang, D.; Cao, T.; Song, H. Robot parameters calibration combining experiment and simulation. J. Mech. Electr. Eng. 2013, 30, 1182–1187. [Google Scholar]
- Chen, X.-J.; Zhao, Z.F.; Ren, G.-Y.; Li, D.-C.; Ban, Z. Research on Robot Kinematics Parameter Calibration Based on Particle Swarm Optimization. Acta Metrol. Sin. 2020, 41, 85–91. [Google Scholar]
- Zhao, Y.-B.; Wen, X.-L.; Qiao, G.-F.; Song, A.-G.; Kang, C.-S. Accuracy Improvement of Serial Robot Based on Geometric Parameters Calibration. Acta Metrol. Sin. 2020, 41, 1461–1466. [Google Scholar]
- Jiang, X.Y.; Li, S. BAS: Beetle antennae search algorithm for optimization problems. arXiv 2017, arXiv:1710.10724v1. [Google Scholar] [CrossRef]
- Jiang, X.Y.; Li, S. Beetle antennae search without parameter tun-ing (BAS WPT) for multi-objective optimization. arXiv 2017, arXiv:1711.02395v1. [Google Scholar] [CrossRef]
- Khan, A.H.; Cao, X.W.; Li, S.; Katsikis, V.K.; Liao, L. BAS-ADAM:an ADAM based approach to improve the performance of beetle antennae search optimizer. IEEE/CAA J. Autom. Sin. 2020, 7, 461–471. [Google Scholar] [CrossRef]
- Ye, Y.; Zhang, H.-Z. Wolf pack algorithm for multi· depot vehicle muting problem. AppHcation Res. Comput. 2017, 34, 2590–2593. [Google Scholar]
- Li, N.J.; Wang, W.J.; Hsu, C.C.J. Hybrid particle swarm optimization incorporating fuzzy reasoning and weighted particle. Neurocomputing 2014, 167, 488–501. [Google Scholar] [CrossRef]
- Luo, J.; Chen, M.R. Multi-phase modified shuffled frog leaping algorithm with extremal optimization for the MDVRP and the MDVRPTW. Comput. Ind. Eng. 2014, 72, 84–97. [Google Scholar] [CrossRef]
- Eusuff, M.M.; Lansey, K.E. Optimization of water distribution network design using the shuffled frog leaping algorithm. J. Water Resour. Plan. Manag. 2003, 129, 210–225. [Google Scholar] [CrossRef]
- Dang, K.; Li, P.-J.; Liu, C. Research on MPPT Control of Photovoltaic System Based on Variable—step Beetle Antennae Search Algorithm. Jilin Electr. Power 2019, 264, 27–32. [Google Scholar]
- Xu, W.-Y.; Yang, W.; Lu, W.-S. Status and prospect of research on robot remote operation. Transl. Med. J. 2015, 4, 94–98. [Google Scholar]
- Chen, H.; Wang, D.; Cao, T.; Ni, Z. Parameter optimization of medical robots according to the surgery space. Chin. High Technol. Lett. 2014, 24, 284–288. [Google Scholar]
- Wang, D.; Cao, T.; Liu, D. The research on the accuracy of robots based on a model of accuracy. Chin. High Technol. Lett. 2014, 24, 93–98. [Google Scholar]
- Zhao, Q.; Qian, Y.; Tian, Y. Brain surgery under different sea conditions in long voyages such as Accuracy testing of surgical positioning robotic system. Chin. J. Naut. Med. Hyperb. Med. 2012, 19, 379–381. [Google Scholar]
- Zhou, T.; Qian, Q.; Fu, Y. Fusion Simulated Annealing and Adaptive Beetle Antennae Search Algorithm. Commun. Technol. 2019, 52, 1626–1631. [Google Scholar]
- Wen, X.; Lv, Z.; He, S.; Wang, D.; Kang, C. Study on robot geometric parameters improved particle swarm calibration based on algorithm. J. Nanjing Univ. Inf. Sci. Technol. (Nat. Sci. Ed.) 2019, 11, 144–150. [Google Scholar]
- Gao, S. Research on annealing strategy in Simulated Annealing Algorithm. Aeronaut. Comput. Tech. 2002, 32, 20–22. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint i | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 |
| 2 | 200 | 0 | 0 | 0 |
| 3 | 200 | 0 | 0 | 0 |
| 4 | 0 | −90 | −170 | −90 |
| 5 | 0 | −90 | 145 | 0 |
| 6 | 0 | 0 | 150 | 0 |
| Joint i | ||||
|---|---|---|---|---|
| 1 | 0.36 | −0.0072 | 0.13 | 0.0093 |
| 2 | 0.45 | 0.0064 | −0.45 | −0.0081 |
| 3 | −0.06 | 0.0083 | 0.40 | 0.0 |
| 4 | 0.24 | 0.0058 | 0.12 | 0.0076 |
| 5 | 0.13 | −0.0097 | −0.39 | −0.009 |
| 6 | −0.17 | −0.0053 | 0.13 | 0.006 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kou, B.; Ren, D.; Guo, S. Geometric Parameter Identification of Medical Robot Based on Improved Beetle Antennae Search Algorithm. Bioengineering 2022, 9, 58. https://doi.org/10.3390/bioengineering9020058
Kou B, Ren D, Guo S. Geometric Parameter Identification of Medical Robot Based on Improved Beetle Antennae Search Algorithm. Bioengineering. 2022; 9(2):58. https://doi.org/10.3390/bioengineering9020058
Chicago/Turabian StyleKou, Bin, Dongcheng Ren, and Shijie Guo. 2022. "Geometric Parameter Identification of Medical Robot Based on Improved Beetle Antennae Search Algorithm" Bioengineering 9, no. 2: 58. https://doi.org/10.3390/bioengineering9020058
APA StyleKou, B., Ren, D., & Guo, S. (2022). Geometric Parameter Identification of Medical Robot Based on Improved Beetle Antennae Search Algorithm. Bioengineering, 9(2), 58. https://doi.org/10.3390/bioengineering9020058