
Representing Route Familiarity Using the Abstraction Hierarchy Framework

Abstract
:1. Introduction
2. Using Abstraction Hierarchy to Represent Route Familiarity
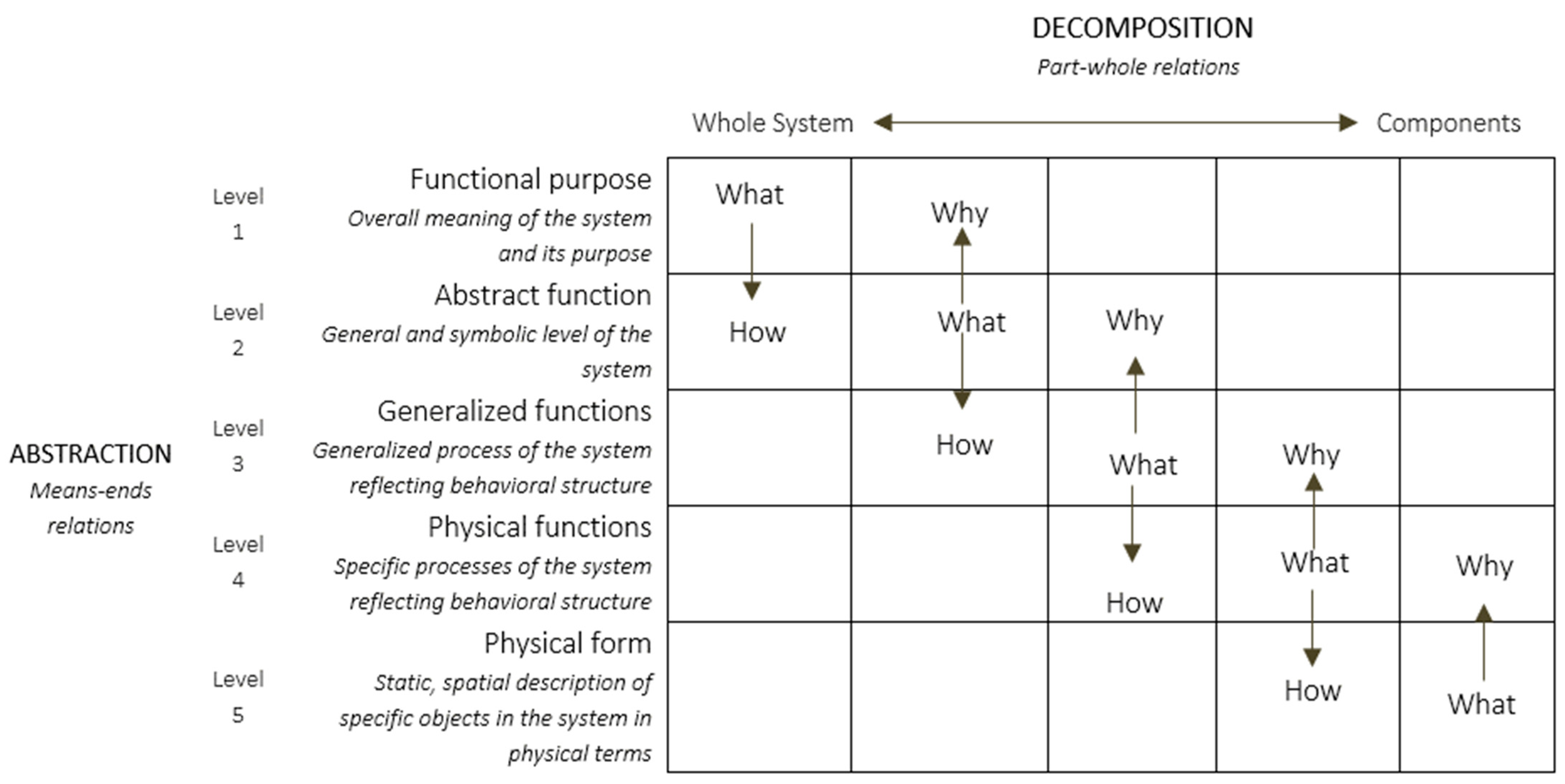
2.1. Rasmussen’s Abstraction Hierarchy Framework
2.2. Levels within Rasmussen’s Abstraction Hierarchy Framework
3. Method
3.1. Participants
3.2. OBDII Devices
3.3. Trip Diaries
3.4. Developing a Familiarity Abstraction Hierarchy Framework
4. Results
4.1. Trips Driven by Older Drivers
4.2. Factors That Characterize Route Familiarity among Older Drivers
5. Discussion
5.1. Moving from a Conceptual Framework to an Operational Measure of Route Familiarity
5.2. Utility and Challenges of the Familiarity Abstraction Hierarchy Framework
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- McGinty, L.; Smyth, B. Personalised Route Planning: A Case-Based Approach. In European Workshop on Advances in Case-Based Reasoning; Springer: Berlin/Heidelberg, Germany, 2000; pp. 431–443. [Google Scholar]
- Mourant, R.R.; Rockwell, T.H. Mapping eye-movement patterns to the visual scene in driving: An exploratory study. Hum. Factors 1970, 12, 81–87. [Google Scholar] [CrossRef]
- Allen, R.W.; Stein, A.C.; Rosenthal, T.J.; Ziedman, D.; Torres, J.F.; Halati, A. A Human Factors Simulation Investigation of Driver Route Diversion and Alternate Route Selection using In-Vehicle Navigation Systems. In Proceedings of the Vehicle Navigation and Information Systems Conference, Troy, MI, USA, 20–23 October 1991; Volume 2. [Google Scholar] [CrossRef]
- Kantowitz, B.H.; Hanowski, R.J.; Kantowitz, S.C. Driver Acceptance of Unreliable Traffic Information in Familiar and Unfamiliar Settings. Hum. Factors J. Hum. Factors Ergon. Soc. 1997, 39, 164–176. [Google Scholar] [CrossRef]
- Lotan, T. Effects of familiarity on route choice behavior in the presence of information. Transp. Res. Part C Emerg. Technol. 1997, 5, 225–243. [Google Scholar] [CrossRef]
- Beijer, D.; Smiley, A.; Eizenman, M. Observed driver glance behavior at roadside advertising signs. Transp. Res. Rec. 2004, 1899, 96–103. [Google Scholar] [CrossRef]
- Srinivas, S.; Hirtle, S.C. Knowledge based Schematization of Route Directions. In International Conference on Spatial Cognition; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4387, pp. 346–364. [Google Scholar] [CrossRef]
- Martens, M.H.; Fox, M. Does road familiarity change eye fixations? A comparison between watching a video and real driving. Transp. Res. Part F Traffic Psychol. Behav. 2007, 10, 33–47. [Google Scholar] [CrossRef]
- Uc, E.Y.; Rizzo, M.; Anderson, S.W.; Sparks, J.D.; Rodnitzky, R.L.; Dawson, J.D. Impaired navigation in drivers with Parkinson’s disease. Brain 2007, 130, 2433–2440. [Google Scholar] [CrossRef]
- Mader, M.; Bresges, A.; Topal, R.; Busse, A.; Forsting, M.; Gizewski, E.R. Simulated car driving in fMRI-Cerebral activation patterns driving an unfamiliar and a familiar route. Neurosci. Lett. 2009, 464, 222–227. [Google Scholar] [CrossRef]
- Yanko, M.R.; Spalek, T.M. Route familiarity breeds inattention: A driving simulator study. Accid. Anal. Prev. 2013, 57, 80–86. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Miwa, T.; Morikawa, T. Use of Private Probe Data in Route Choice Analysis to Explore Heterogeneity in Drivers’ Familiarity with Origin-Destination Pairs. Transp. Res. Rec. 2013, 2338, 20–28. [Google Scholar] [CrossRef]
- Ramachandran, D.; Karpov, I.V.; Gupta, R.; Raux, A. Driver Familiarity Modeling for Generating Navigation Directions. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 2193–2200. [Google Scholar] [CrossRef]
- Marquez, D.X.; Hunter, R.H.; Griffith, M.H.; Bryant, L.L.; Janicek, S.J.; Atherly, A.J. Older adult strategies for community wayfinding. J. Appl. Gerontol. 2017, 36, 213–233. [Google Scholar] [CrossRef]
- Payyanadan, R.P.; Lee, J.D. Influence of familiarity on the driving behavior, route risk, and route choice preferences of older drivers. IEEE Trans. Hum.-Mach. Syst. 2018, 49, 10–19. [Google Scholar] [CrossRef]
- Intini, P. The Impact of Route Familiarity on Drivers’ Speeds, Trajectories and Risk Perception. In Proceedings of the 17th International Conference Road Safety On Five Continents (RS5C 2016), Rio de Janeiro, Brazil, 17–19 May 2016; p. 12. [Google Scholar]
- Reimer, B.; D’Ambrosio, L.A.; Coughlin, J.E.; Kafrissen, M.E.; Biederman, J. Using self-reported data to assess the validity of driving simulation data. Behav. Res. Methods 2006, 38, 314–324. [Google Scholar] [CrossRef] [Green Version]
- Yonelinas, A.P. The nature of recollection and familiarity: A review of 30 years of research. J. Mem. Lang. 2002, 46, 441–517. [Google Scholar] [CrossRef] [Green Version]
- Yonelinas, A.P. Receiver-operating characteristics in recognition memory: Evidence for a dual-process model. J. Exp. Psychol. Learn. Mem. Cognit. 1994, 20, 1341–1354. [Google Scholar] [CrossRef]
- Jacoby, L.L. A process dissociation framework: Separating automatic from intentional uses of memory. J. Mem. Lang. 1991, 30, 513–541. [Google Scholar] [CrossRef]
- Bonsall, P.; Firmin, P.; Anderson, M.; Palmer, I.; Balmforth, P. Validating the results of a route choice simulator. Transp. Res. Part C Emerg. Technol. 1997, 5, 371–387. [Google Scholar] [CrossRef]
- Hamed, M.M.; Abdul-Hussain, A.A. Driver’s familiarity with urban route network layout in Amman, Jordan. Cities 2001, 18, 93–102. [Google Scholar] [CrossRef]
- Dia, H. An agent-based approach to modelling driver route choice behaviour under the influence of real-time information. Transp. Res. Part C Emerg. Technol. 2002, 10, 331–349. [Google Scholar] [CrossRef] [Green Version]
- Patel, K.; Chen, M.Y.; Smith, I.; Landay, J.A. Personalizing Routes. In Proceedings of the 19th Annual ACM Symposium on User Interface Software and Technology, Montreux, Switzerland, 15–18 October 2006; p. 187. [Google Scholar] [CrossRef]
- Zhang, L.; Levinson, D. Determinants of Route Choice and Value of Traveler Information: A Field Experiment. Transp. Res. Rec. 2008, 2086, 81–92. [Google Scholar] [CrossRef] [Green Version]
- Lin, I.C.; Chou, S.Y. Developing Adaptive Driving Route Guidance Systems based on Fuzzy Neural Network. In Proceedings of the Intelligent Environments, 2008 IET 4th International Conference, Seattle, WA, USA, 21–22 July 2008; pp. 1–8. [Google Scholar]
- Prato, C.G.; Bekhor, S.; Pronello, C. Latent variables and route choice behavior. Transportation 2012, 39, 299–319. [Google Scholar] [CrossRef]
- Prato, C.G. Route choice modeling: Past, present and future research directions. J. Choice Model. 2009, 2, 65–100. [Google Scholar] [CrossRef] [Green Version]
- Payyanadan, R.P.; Gibson, M.; Chiou, E.; Ghazizadeh, M.; Lee, J.D. Contextual Design for Driving: Developing a Trip-planning Tool for Older Adults. Transp. Res. Part F Traffic Psychol. Behav. 2017, 46, 462–476. [Google Scholar] [CrossRef]
- Papinski, D.; Scott, D.M.; Doherty, S.T. Exploring the route choice decision-making process: A comparison of planned and observed routes obtained using person-based GPS. Transp. Res. Part F Traffic Psychol. Behav. 2009, 12, 347–358. [Google Scholar] [CrossRef]
- Ittelson, W.H. Environment perception and contemporary perceptual theory. In Environmental Psychology: People and Their Physical Settings; American Psychological Association: Washington, DC, USA, 1976; pp. 141–154. [Google Scholar]
- Timpf, S. Abstraction, Levels of Detail, and Hierarchies in Map Series. In International Conference on Spatial Information Theory; Springer: Berlin/Heidelberg, Germany, 1999; Volume 1661, pp. 125–140. [Google Scholar] [CrossRef]
- Hirtle, S.C.; Jonides, J. Evidence of hierarchies in cognitive maps. Mem. Cognit. 1985, 13, 208–217. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Smith, E.E.; Medin, D.L. Categories and Concepts; Harvard University Press: Cambridge, MA, USA, 1989. [Google Scholar]
- Rosch, E.; Mervis, C.B.; Gray, W.D.; Johnson, D.M.; Boyes-Braem, P. Basic objects in natural categories. Cogn. Psychol. 1976, 8, 382–439. [Google Scholar] [CrossRef] [Green Version]
- Tversky, B.; Hemenway, K. Objects, parts, and categories. J. Exp. Psychol. Gen. 1984, 113, 169–193. [Google Scholar] [CrossRef] [PubMed]
- Goldberg, L.R. The validity of rating procedures to index the hierarchical level of categories. J. Mem. Lang. 1986, 25, 323–347. [Google Scholar] [CrossRef]
- Vicente, K.J.; Wang, J.H. An ecological theory of expertise effects in memory recall. Psychol. Rev. 1998, 105, 33. [Google Scholar] [CrossRef]
- Naikar, N. Work Domain Analysis: Concepts, Guidelines, and Cases; CRC Press: Boca Raton, FL, USA, 2013; p. 28. [Google Scholar]
- Hajdukiewicz, J.R.; Burns, C.M.; Vicente, K.J.; Eggleston, R.G. Work Domain Analysis for Intentional Systems. In Proceedings of the Human Factors and Ergonomics Society 43rd Annual Meeting, Los Angeles, CA, USA, 27 September–1 October 1999; pp. 333–337. [Google Scholar]
- Miller, C.A.; Vicente, K.J. Toward an Integration of Task-and Work Domain Analysis Techniques for Human-Computer Interface Design. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Chicago, IL, USA, 5–9 October 1998; pp. 336–340. [Google Scholar]
- Rasmussen, J. Information Processing and Human-Machine Interaction: An Approach to Cognitive Engineering; Elsevier Science Ltd.: Amsterdam, The Netherlands, 1986; p. 72. [Google Scholar]
- Burns, C.M.; Vicente, K.J. Model-Based Approaches for Analyzing Cognitive Work: A Comparison of Abstraction Hierarchy, Multilevel Flow Modeling, and Decision Ladder Modeling. Int. J. Cogn. Ergon. 2001, 5, 357–366. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Helbing, D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity. Philos. Trans. A. Math. Phys. Eng. Sci. 2010, 368, 4585–4605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rasmussen, J. Taxonomy for Work Analysis. In Design of Work and Development of Personnel in Advanced Manufacturing; John Wiley & Sons: New York, NY, USA, 1994; pp. 41–77. [Google Scholar]
- Donorfio, L.K.M.; Mohyde, M.; Coughlin, J.; D’Ambrosio, L. A Qualitative Exploration of Self-Regulation Behaviors among Older Drivers. J. Aging Soc. Policy 2008, 20, 323–339. [Google Scholar] [CrossRef] [PubMed]
- Myers, A.M.; Paradis, J.A.; Blanchard, R.A. Conceptualizing and Measuring Confidence in Older Drivers: Development of the Day and Night Driving Comfort Scales. Arch. Phys. Med. Rehabil. 2008, 89, 630–640. [Google Scholar] [CrossRef] [PubMed]
- Ruechel, S.; Mann, W.C. Self-regulation of driving by older persons. Phys. Occup. Ther. Geriatr. 2005, 23, 91–101. [Google Scholar] [CrossRef]
- Helgoe, R.S. Frequency and Recency in Visual Recognition. Psychol. Rec. 1976, 26, 227–232. [Google Scholar] [CrossRef]
- Hintzman, D.L. Judgments of frequency and recency: How they relate to reports of subjective awareness. J. Exp. Psychol. Learn. Mem. Cognit. 2001, 27, 1347–1358. [Google Scholar] [CrossRef]
- Zhang, J.; Ghorbani, A.A. Familiarity and trust: Measuring familiarity with a web site. In Proceedings of the Second Annual Conference on Privacy, Security and Trust, Fredericton, NB, Canada, 13–15 October 2004; pp. 23–28. [Google Scholar]
- Vrotsou, K.; Forsell, C. A Qualitative Study of Similarity Measures in Event-Based Data. In Symposium on Human Interface; Springer: Berlin/Heidelberg, Germany, 2011; pp. 170–179. [Google Scholar] [CrossRef]
- Wixted, J.T. Dual-process theory and signal-detection theory of recognition memory. Psychol. Rev. 2007, 114, 152–176. [Google Scholar] [CrossRef] [Green Version]
- Bryden, K.J.; Charlton, J.L.; Oxley, J.A.; Lowndes, G.J. Self-reported wayfinding ability of older drivers. Accid. Anal. Prev. 2013, 59, 277–282. [Google Scholar] [CrossRef]
- Lind, M. Making Sense of the Abstraction Hierarchy. In Proceedings of the Seventh European Conference on Cognitive Science Approaches to Process Control, Villeneuve d’Ascq, France, 21–24 September 1999. [Google Scholar]
- Jacko, J.A. Human Computer Interaction Handbook: Fundamentals, Evolving Technologies, and Emerging Applications; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- van Otterlo, M. The Logic of Adaptive Behavior; Ios Press: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Vicente, K.J.; Rasmussen, J. Ecological Interface Design: Theoretical Foundations. IEEE Trans. Syst. Man Cybern. 1992, 22, 589–606. [Google Scholar] [CrossRef] [Green Version]
- Laran, J.; Wilcox, K. Choice, Rejection, and Elaboration on Preference-Inconsistent Alternatives. J. Consum. Res. 2011, 38, 229–241. [Google Scholar] [CrossRef] [Green Version]
- Trick, L. Driving and Selective Attention: A Conceptual Framework for Understanding the Role of Selective Attention in Driving; Vehicles X.: Amsterdam, The Netherlands, 2004; pp. 1–9. [Google Scholar]
- Johnson, E.J.; Hardie, B.G.S.; Meyer, R.J.; Walsh, J. Observing Unobserved Heterogeneity: Using Process Data to Enhance Choice Models; Working Paper; Columbia Business School: New York, NY, USA, March 2006; p. 38. [Google Scholar]
- Zheng, Y.; Xie, X. Learning travel recommendations from user-generated GPS traces. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–29. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Author | Study Goal | Study Setting | Route Familiarity Determined by |
|---|---|---|---|
| Mourant and Rockwell [2] | Effect of route familiarity on driver search and scan behavior | Simulator | Training drivers on a preset route |
| Allen et al. [3] | Effect of navigation system characteristics on driver route diversion behavior | Simulator | Recruiting drivers with knowledge of the road network |
| Kantowitz, Hanowski, and Kantowitz [4] | Effect of familiarity on the use and acceptance of ATIS | Simulator | Recruiting drivers with knowledge of the road network |
| Lotan [5] | Effects of network familiarity on route choice behavior | Simulator | Using travel behavior surveys and interviewing drivers with knowledge of the road network |
| Beijer, Smiley, and Eizenman [6] | Effect of route familiarity on glance behavior | On-road (Preset route on expressway) | Frequency of travel along a 6 km stretch of an expressway |
| Srinivas and Hirtle [7] | Preferences of schematized direction for familiar and unfamiliar routes | On-road (Preset route) | Training on set routes |
| Martens and Fox [8] | Effect of route familiarity on eye fixation changes | Simulator | Repeated exposure to the simulated driving scenarios |
| Uc et al. [9] | Effect of route familiarity on navigation and safety errors | On-road (Preset route) | Asking drivers of their knowledge of the road network |
| Mader et al. [10] | Effect of route familiarity on attention and perception processes | Simulator | Repeated exposure to the simulated driving scenarios |
| Yanko and Spalek [11] | Effect of route familiarity on hazard avoidance | Simulator | Training drivers on a preset route |
| Li, Miwa, and Morikawa [12] | Effect of familiarity to origin and destination (O-D) pairs | On-road (route known to participants) | Frequency of trips for the same O-D pair |
| Ramachandran, Karpov, Gupta, and Raux [13] | Modelling familiarity for navigation | On-road (preset route) | Categorizing a route as familiar if the driver can complete a route from A to B with minimal map/device assistance |
| Marquez et al. [14] | Effect of route familiarity on wayfinding | On-road (preset route) | Older drivers with knowledge of the road network |
| Payyanadan and Lee [15] | Effect of route familiarity on driving behavior and risk | On-road (daily routes driven by participants) | Administering post-trip surveys about the drivers route familiarity |
| Intini [16] | Effect of route familiarity on driving behavior | On-road | Recruiting drivers with knowledge of the set route |
| Gender | Total | Average (SD) Age | Average (SD) Trip Distance (miles) | Average (SD) Trip Time (min) |
|---|---|---|---|---|
| Females | 15 | 70 (4.6) | 7.0 (2.8) | 13.2 (6.7) |
| Males | 14 | 73 (4.7) | 7.9 (3.1) | 13.6 (6.9) |
| Prompts (Naikar, 2013) | Keywords (Naikar, 2013) | Examples of Feedback Responses for Choosing a Familiar Route | AH Levels (Rasmussen, 1986) |
|---|---|---|---|
| Purposes: - Why does the system exist? - Why is the system necessary? - What objectives is the system designed to achieve? External Constraints: - What type of constraints does the environment impose on the system? - What values does the environment impose on the system? - What laws and regulations do the environment impose on the system? | Purposes: Reasons, goals, objectives, aims, intentions, mission, plans, services. External constraints: laws, regulations, guidance, standards. | “Had to visit the bank, then drop off some mail, get my groceries” | LEVEL 1 Functional purpose |
| - What criteria can be used to determine whether the system is achieving its purposes? - What criteria can be used to judge whether the system is satisfying its external constraints? - What criteria can be used to compare the results or effects of the purpose-related functions on the functional purposes? | Criteria, measures, judgements, schedules, outcomes, limits. Measures of: effectiveness, efficiency, reliability, risk, resources, time, quality, frequency, success. Values: laws, regulations, standards, principles. | “There was construction there…had detours, needed a lot lane changes, and merging with traffic” | LEVEL 2 Values and priority measures |
| - What functions are required to achieve the purposes of the system? - What functions are required to satisfy the external constraints on the system? - What functions are performed in the system? | Functions, roles, responsibilities, purposes, tasks, duties, occupations. | “Higher speed limit on this route” | LEVEL 3 Purpose- related functions |
| - What can the physical objects in the system do or afford? - What are the functional capabilities and limitations of physical objects in the system? - What functionality is required in the system to enable the purpose-related functions? | Applications, functionality, characteristics, capabilities, limitations, capacity. | “Prefer to avoid that route because of the roundabout” | LEVEL 4 Object-related processes |
| - What are the physical objects in the system? - What physical objects are necessary to enable the processes and functions of the system? - What is the topography of physical objects in the system? | Objects: buildings, facilities, premises, infrastructure, fixtures, people, terrain, land, meteorological features. Material characteristics: appearance, shape, dimensions, attributes, configuration. Topography: location, layout, spacing, positions, orientations. | “Needed to leave from my friend’s place at 6PM and take the highway” | LEVEL 5 Physical objects |
| Percent of Trips Driven by Older Drivers With | |||||||
|---|---|---|---|---|---|---|---|
| Total Drivers | Total Trips | Average Speed (mph) | Speed Violation Events | Hard Braking Events | Hard Cornering Events | Hard Acceleration Events | Seatbelt Violation Events |
| 29 | 5365 | 23.34 | 44.00 | 0.49 | 5.00 | 91.00 | 0.40 |
| Risky Driving Behavior Events/mile | For Familiar Routes (Mean) | For Unfamiliar Routes (Mean) | Estimated Difference of Familiar and Unfamiliar Routes | p-Value | 95% CI |
|---|---|---|---|---|---|
| Harsh cornering | 0.005 | 0.001 | 0.004 | 0.41 | [−0.005, 0.013] |
| Hard braking | 0.00 | 0.00 | 0.00 | 0.33 | [0.000, 0.001] |
| Hard acceleration | 2.10 | 3.91 | −1.90 | 0.12 | [−3.94, 0.14] |
| Speeding | 0.87 | 0.78 | 0.09 | 0.74 | [−0.37, 0.54] |
| Overall events | 2.89 | 4.69 | −1.81 | 0.13 | [−3.76, 0.15] |
| Harsh cornering | 0.005 | 0.001 | 0.004 | 0.41 | [−0.005, 0.013] |
| Abstraction Dimension | Decomposition Dimension | ||||
|---|---|---|---|---|---|
| Type of Trip | Sequence of Segments of a Trip | Series of Maneuvers along a Trip | Micro Adjustments of Lateral and Longitudinal Control | Cardinality | |
| Constraint prompts | Reasons, goals, aims, objectives | Criteria, measures, effectiveness | Activities, processes | Limitations, capabilities | Geographical features |
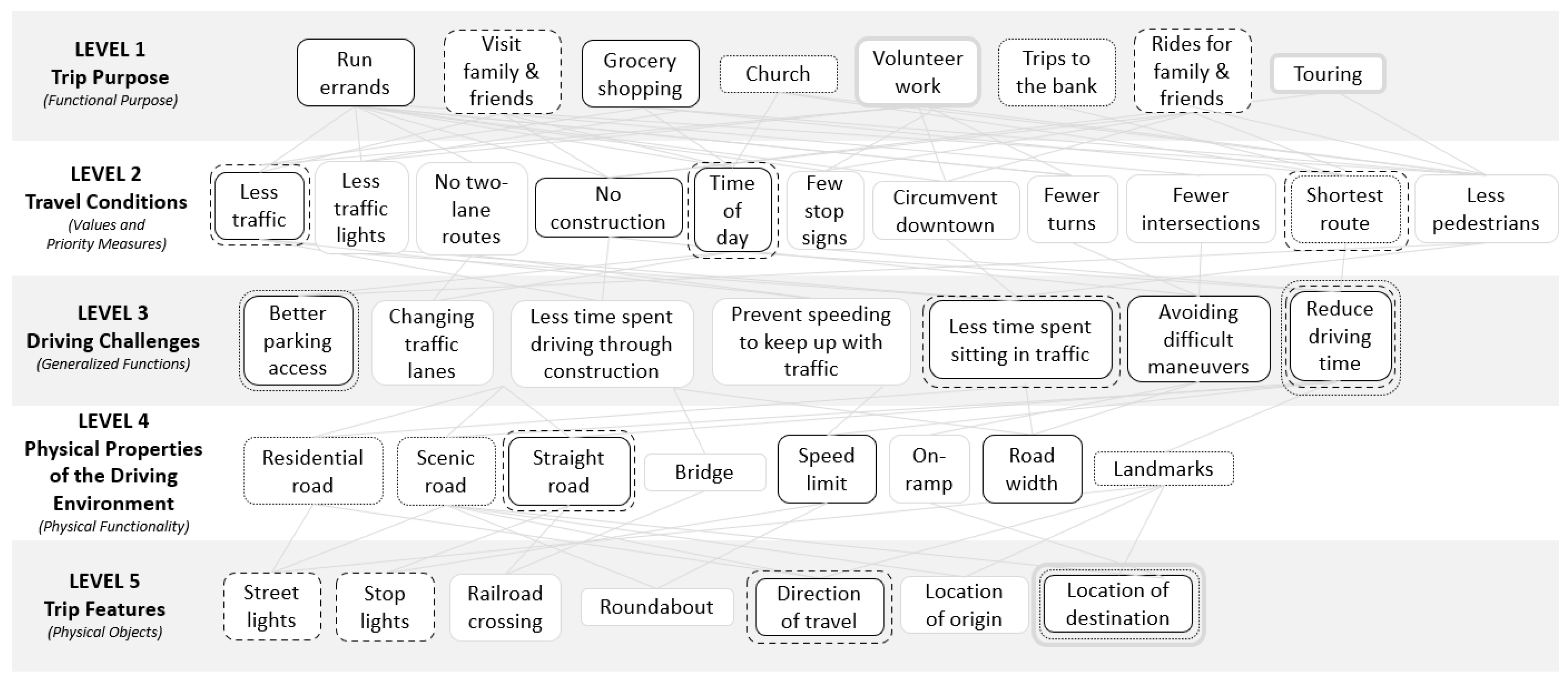
| Trip Purpose (Level 1) | Grocery shopping Church Touring Multiple errands Visiting family and friends Volunteer work Rides for family and friends Bank work | ||||
| Travel Conditions (Level 2) | Safety Travel time Less pedestrians Less traffic Direct route Time of day Access to parking | ||||
| Driving Challenges (Level 3) | Speeding to keep with flow of the traffic. Crossing a number of wide intersections. Multiple lane changes on 4-lane, high traffic roads. Hard braking for quick turns. Speeding on turns to merge with speeding traffic. Construction zones. | ||||
| Physical Properties of the Environment (Level 4) | Onramp Complex navigation Wide intersections High speed limit Crossing 4-lane in traffic Long traffic lights Multiple stop signs Narrow routes Landmarks | ||||
| Trip Features (Level 5) | Direction of travel Origin and destination | ||||
| Description of the Abstraction Hierarchy Levels | Driving Context Representation | Mathematical Representation | Similarity Measure |
|---|---|---|---|
| Level 1: Overall purpose, objectives, and external constraints on the system due to the environment. | Trip purpose level (e.g., grocery shopping, running errands). | Similarity () of the trip purpose (), objectives (), and external constraints () between two or more trips. | |
| Level 2: Values and priority measures needed to fulfill the functional purpose of the system. | Travel conditions level (e.g., shortest route, fastest route). | Similarity () in the overlap () between the travel conditions criteria () between two or more routes. | |
| Level 3: Functions and processes that must be supported to fulfill the system’s functional purpose, independent of the underlying physical objects or object-related processes needed to implement them. | Driving challenges level (e.g., braking, accelerating). | Similarity () in the overlap of driving challenges criteria () between two or more routes. | |
| Level 4: Object-related processes or parts of the system that are used to characterize the functional states. | Physical properties of the environment level (e.g., speed bumps, U-turns). | Similarity () in the overlap () of sequence of the object-related processes or parts (N) between two or more routes. | |
| Level 5: Physical appearance and configuration of the system and its parts. | Trip features level (e.g., home to grocery store). | Similarity () in the overlap () of physical location (), and spatial distribution () between two or more routes. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Payyanadan, R.P.; Lee, J.D. Representing Route Familiarity Using the Abstraction Hierarchy Framework. Geriatrics 2021, 6, 81. https://doi.org/10.3390/geriatrics6030081
Payyanadan RP, Lee JD. Representing Route Familiarity Using the Abstraction Hierarchy Framework. Geriatrics. 2021; 6(3):81. https://doi.org/10.3390/geriatrics6030081
Chicago/Turabian StylePayyanadan, Rashmi P., and John D. Lee. 2021. "Representing Route Familiarity Using the Abstraction Hierarchy Framework" Geriatrics 6, no. 3: 81. https://doi.org/10.3390/geriatrics6030081
APA StylePayyanadan, R. P., & Lee, J. D. (2021). Representing Route Familiarity Using the Abstraction Hierarchy Framework. Geriatrics, 6(3), 81. https://doi.org/10.3390/geriatrics6030081