3.1. Flow Response and Flow-Wall Coupling
An important consideration in studying flows with compliant surfaces is whether the coupling is one-way or two-way. In a one-way coupling, the stresses in the flow deform the surface, but the deformations are small enough such that the mean flow properties are unaffected; this is typically taken to be for surface deformations less than 1 viscous unit [
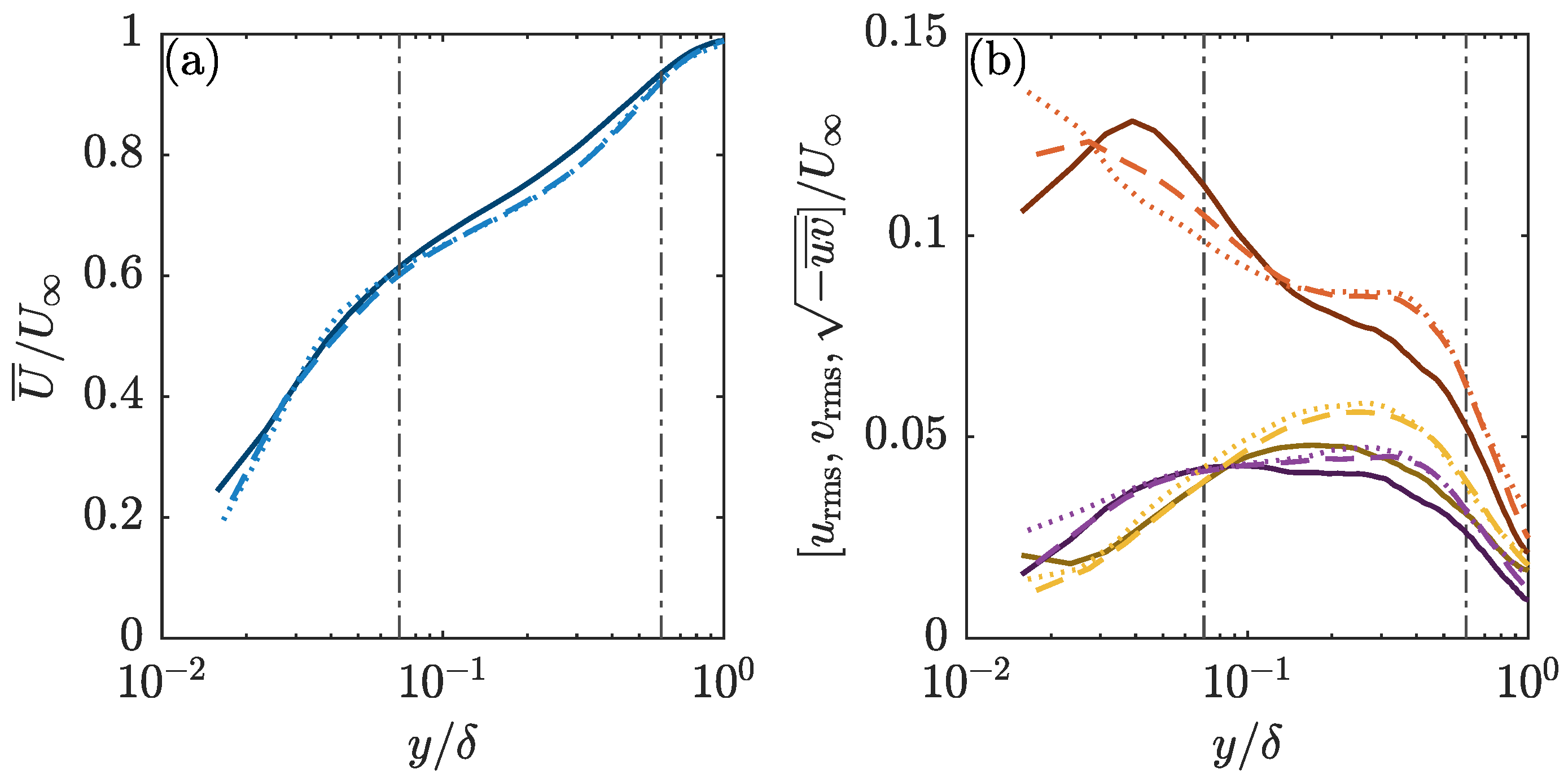
9]. For larger deformations, the influence of the surface on the flow must be considered. To investigate the level of coupling, the flow statistics are plotted in
Figure 3 for the RW-DRF and CW-DRF data (from actuation condition iii), as well as the canonical data, taken from
. In all of the profiles, the RW- and CW-DRF data agree well. For the mean velocity in
Figure 3a, both profiles exhibit a deficit relative to the canonical case for
. The turbulence intensities and Reynolds shear stress in
Figure 3b are also similar between the RW and CW cases, having elevated energetics over the canonical profiles. Some deviation can be seen very near the wall, particularly in the
. In addition, while
very close to the rigid wall appears to exceed that for the compliant wall in apparent contrast to the findings of [
5], this could be attributed to the differences in the parameters. More specifically, the study of Wang et al. [
5], which identified a significant increase in
near the wall, had similar levels of wall deformation in viscous scale while having significantly higher
than our study. The study of Rosti and Brandt [
8], at lower
, showed no significant changes in the Reynolds stress tensor for the studied case with smallest wall deformation, which is still an order of magnitude larger in viscous scales compared with the measured wall deformation presented here. Overall, the effect of the elastic surface on the flow statistics appears to be minimal, suggesting that the system is in the one-way coupling regime. Though the compliant sample was made very soft, the one-way coupling may be explained by the low Reynolds number and thus low inertia of the flow.
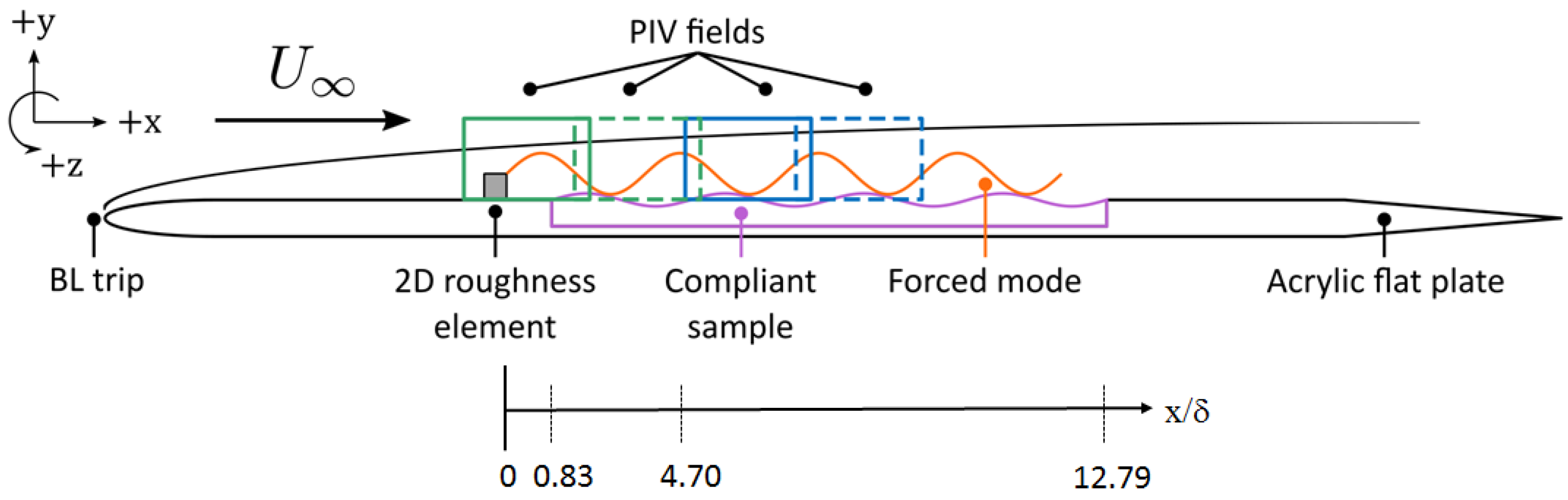
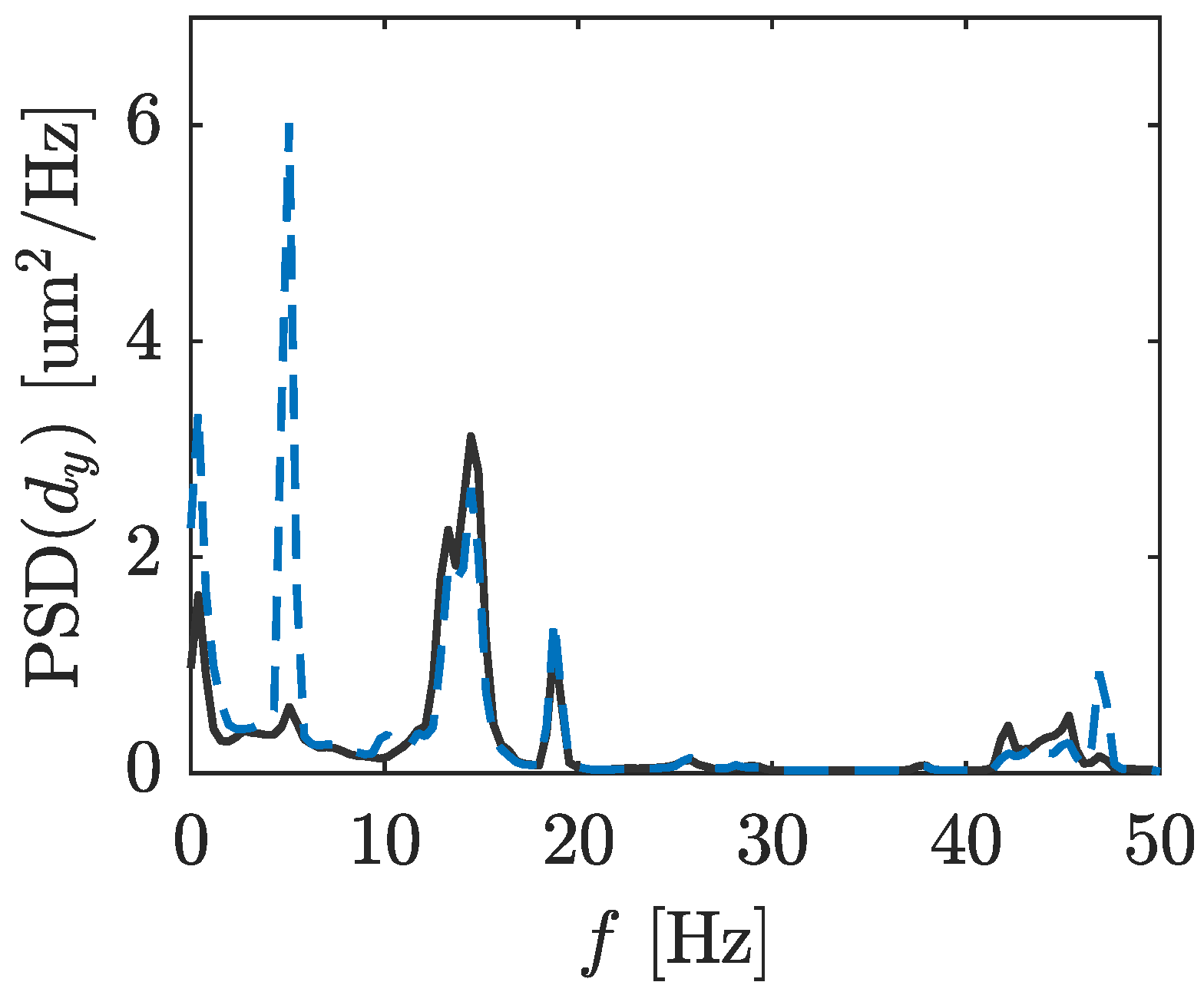
The mean properties of the flow contain the contributions of all length and timescales, and so for an effect of the surface to be observed in that context, it would have to be spectrally broadband, high in amplitude, or both. The use of the dynamic roughness as a deterministic input allows for a more focused analysis of more subtle interactions.
Figure 4 shows temporal power spectra of the wall-normal deformation,
, calculated using MATLAB’s
pwelch function and averaged over the DIC field of view which was near the leading edge of the compliant sample. Given are the spectra for the CW-unforced and CW-DRF (actuation condition iii) studies. The two spectra are very similar in much of their spectral content, discussed in greater detail by Huynh and McKeon [
15]. A slight difference is seen in the lowest resolvable frequency, but by far the most apparent distinction is the peak at 5 Hz for the DRF case, corresponding to the actuation frequency. Clearly the energy from the dynamic roughness is being transmitted to the gelatin, and without significantly modifying the spectral content from the unforced case.
3.2. Response to Forcing
Further leveraging the synthetic input, the component coherent with the forcing frequency,
, can be isolated from the velocity and deformation fields. This was done by a straightforward phase-averaging and discrete Fourier transform procedure in time [
15].
is used to denote a quantity Fourier transformed in time and subscript
indicates that only the (
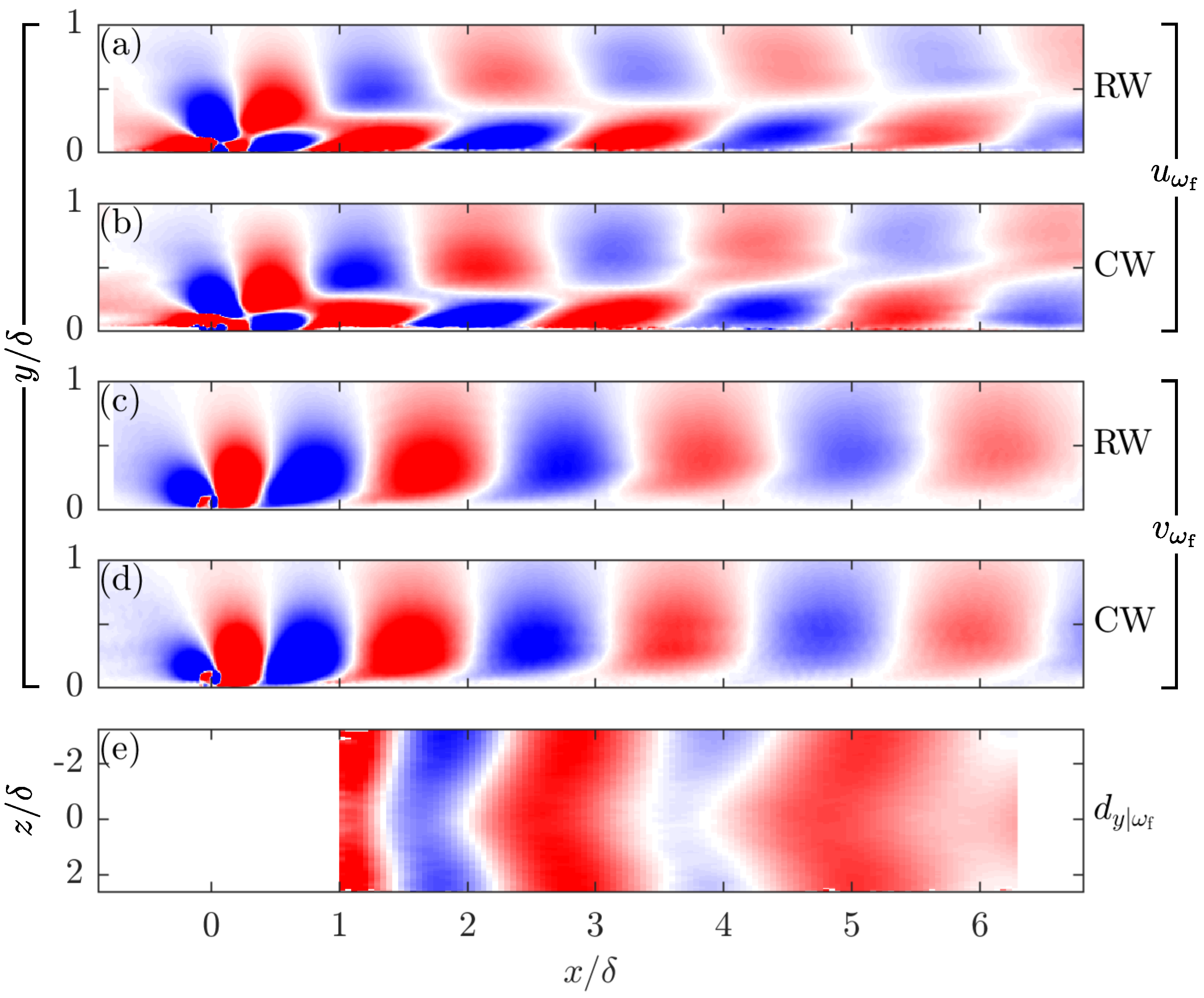
) component has been retained. In
Figure 5, the
phase snapshots (corresponding to the roughness element lying flush with the wall) of the
coherent RW-DRF and CW-DRF velocities and CW-DRF wall-normal deformation are presented, all from actuation condition iii. Looking at the velocity modes (a–d), the RW- and CW-DRF data once again compare well with one another. A streamwise periodic structure is immediately apparent in both
and
, and is seen to convect downstream while gradually decaying and drifting away from the wall. For both the RW and CW modes,
undergoes a
phase jump in
y, while
is tall and straight in
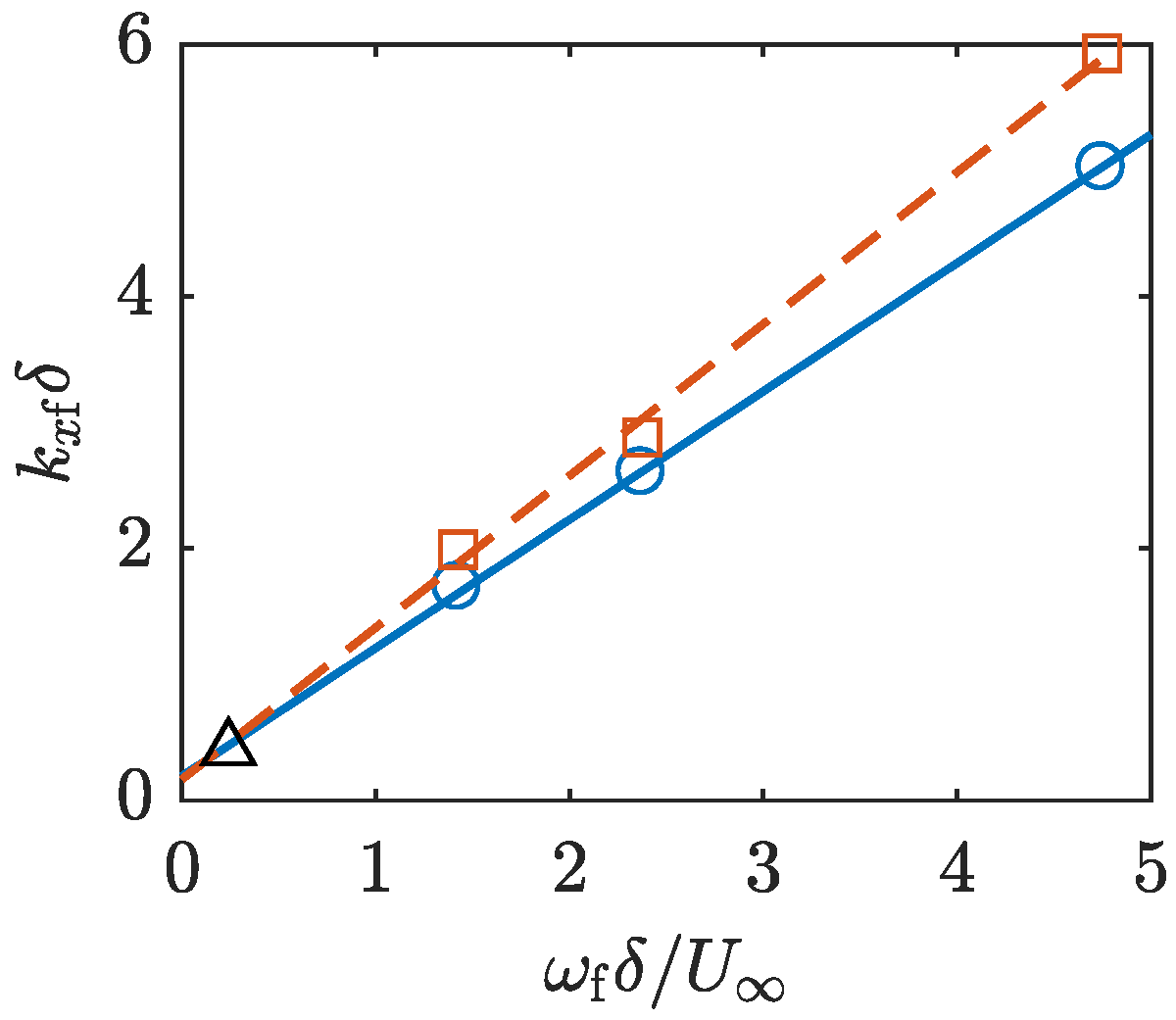
y. This behavior is consistent with a two-dimensional perturbation. Under close inspection of the velocities near the downstream end of the measurement domain, the CW modes can be seen to lag slightly behind the RW modes. This apparent lag is due to the CW synthetic mode having a shorter streamwise lengthscale. Despite the two-dimensional nature of the mean characteristics of the boundary layer, we define an effective streamwise wavelength,
, and effective streamwise wavenumber,
, to compare the modes. This can be quantified by approximating the velocity mode as a streamwise-travelling wave and calculating the streamwise derivative of the mode phase to estimate
[
14].
Figure 6 shows the
values calculated for actuation conditions i, ii, and iv, as well as the value for Duvvuri and McKeon [
17]. The RW and CW data follow a linear trend over the frequency range explored, highlighted by the lines of best fit plotted alongside them. For all actuation conditions, the CW synthetic mode was found to have a higher
value than the RW mode. This may be due to the compliant sample modifying the recirculation region just downstream of the roughness [
26] and possibly reducing the convection velocity of the perturbation. Still, the general structure of the synthetic mode does not appear to be greatly affected by the compliant surface.
The
coherent wall-normal deformation in
Figure 5e contains a structure that is also streamwise periodic, although not as spanwise constant as the flow mode. There is a travelling wave component as well as a large-scale, high amplitude component that resembles a plate vibration mode. As discussed in Huynh and McKeon [
15], the travelling wave content is distinct from other deformation features observed in the surface and is best attributed to a direct interaction with the synthetic flow mode. The bow to the otherwise spanwise constant structure corresponds closely to the slight spanwise variation of the flow mode [
15]. The vibration-type mode was suggested to be the response of the gelatin to pressure fluctuations emanating from the roughness element, despite no physical contact between the roughness apparatus and the flat plate.
Using the
value estimated from the velocity fields, the
-
travelling wave component was extracted from the
signal using a discrete Fourier transform in
x, with a zero-padding to spectrally interpolate to
.
is used to denote a quantity Fourier transformed in time and
x, and subscript
indicates that only the (
) component has been retained. The wall-normal deformation can then be related to the wall-normal velocity at the wall by the no-through boundary condition:
For actuation condition iii, the
-
deformation and wall velocity modes were estimated to be described by:
provides near-wall data that can be combined with PIV data to construct a complete picture of the synthetic flow mode as modified by the compliant surface.
3.3. Comparison of Experimental and Model Results
In the analysis thus far, the effect of the compliant wall on the flow has been minimal. Indeed, the root-mean-square (broadband) deformation is below 1 viscous unit and so a one-way coupling could be expected. Note that despite the small amplitude of the wall deformation, significant flow modification can occur due to the dynamic motion of a compliant wall, e.g., ref. [
8,
9,
27], who identified associated changes to both the mean flow and turbulence structure, initiated at wall deformations smaller than one viscous unit. By taking advantage of the anticipated
-
travelling-wave content, we can investigate the interaction within the narrow context of the synthetic mode. Streamwise and wall-normal resolvent modes,
and
, were calculated using the rigid-wall (
) and compliant-wall (
) resolvent code. All resolvent modes were computed at
,
, matching the experimental results. The experimentally determined streamwise wavenumber
was used for the rigid wall cases and
for the compliant wall cases. However, the experimentally determined temporal frequency was not used in the resolvent for the following reasons. First of all, the temporal frequency is normalized using the friction velocity
, which was difficult to accurately determine from the experimental results. Secondly, the resolvent modes are centered at the critical layer, where the phase speed
(
under the quasi-streamwise parallel assumption being employed here) is equal to the local mean velocity. Although the difference between the mean profile used for the resolvent computation and the experimental mean profile did not change the resolvent mode shapes significantly, it had a non-negligible effect on the critical layer location. As a result, the phase speed
of the resolvent modes were adjusted so that the location of the peak in the streamwise direction matched between the resolvent modes and the experimental results. The
-
Fourier modes from the experimental data were calculated as previous discussed.
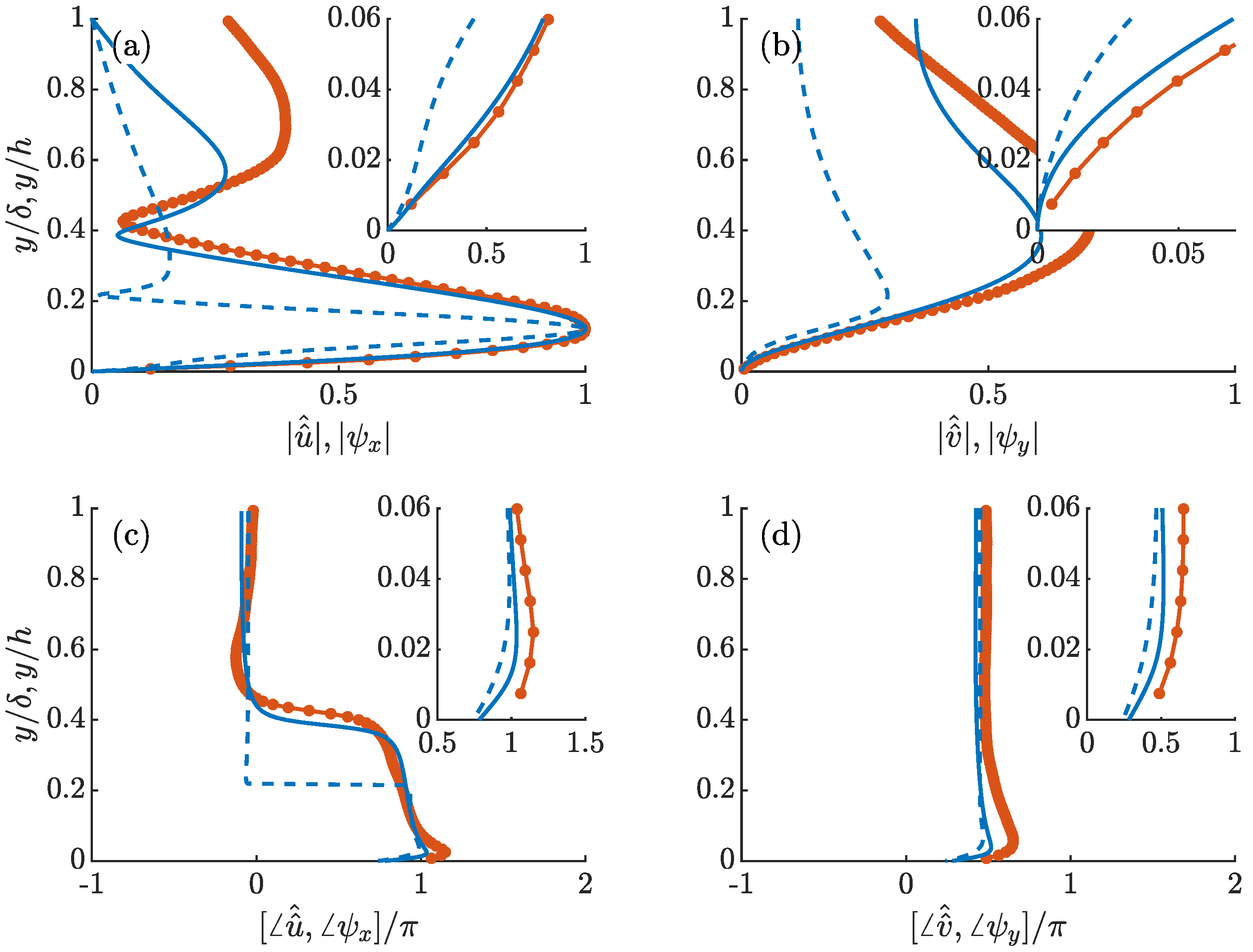
The resolvent response modes with and without eddy viscosity and the experimental Fourier mode shapes are compared in
Figure 7 for the rigid wall case and in
Figure 8 for the compliant wall case. The mode amplitudes have been normalized by the peak in the corresponding streamwise mode amplitude, to preserve the relative amplitude information between
(
) and
(
). The phase of the resolvent modes have been shifted such that
at the streamwise peak location. The phase speeds in the rigid wall cases are
for resolvent without eddy viscosity and
for resolvent with eddy viscosity, these correspond to
and
, slightly lower than the
reported from the experiments [
15].
Although the
-
Fourier modes in
Figure 7 and
Figure 8 share many features with the resolvent modes without eddy viscosity, including the peak structure of the amplitudes, and the shapes of the mode phases, the resolvent analysis over-predicts the amplitude of the streamwise velocity perturbation compared with the wall-normal perturbation and under-predicts the wall normal height of the streamwise velocity peak. The resolvent with eddy viscosity improves the prediction of both the streamwise and wall-normal perturbations for the RW and CW cases, consistent with the results presented in previous work [
28,
29]. As for the phase information,
Figure 8d shows a sharp deviation of the phase of
and both the resolvent modes for the CW profile relative to the RW case. However, the variation is in the opposite sense, with
consistent with a downstream tilted structure, while the resolvent modes with and without the eddy viscosity depict an upstream inclination. Still, the variation of the phase of
suggests that a full
jump might be observed if more near-wall data were available. Note that the expected phase of 1.19
for
at the wall based on the deformation data in Equation (31) does not match particularly well with the CW profile, which attains a value of 1.45
at the lowest resolved point. This is not entirely surprising, as only the
-
coherent wall-normal deformation has been considered here. The other spatio-temporal scales may influence the observed phase of
at the wall by inducing further wall deformation not accounted for here. Additionally, given the high water content of the gelatin, it is possible that the interface between the solid and fluid became semi-permeable, weakening the assumption of a no through-flow boundary condition.
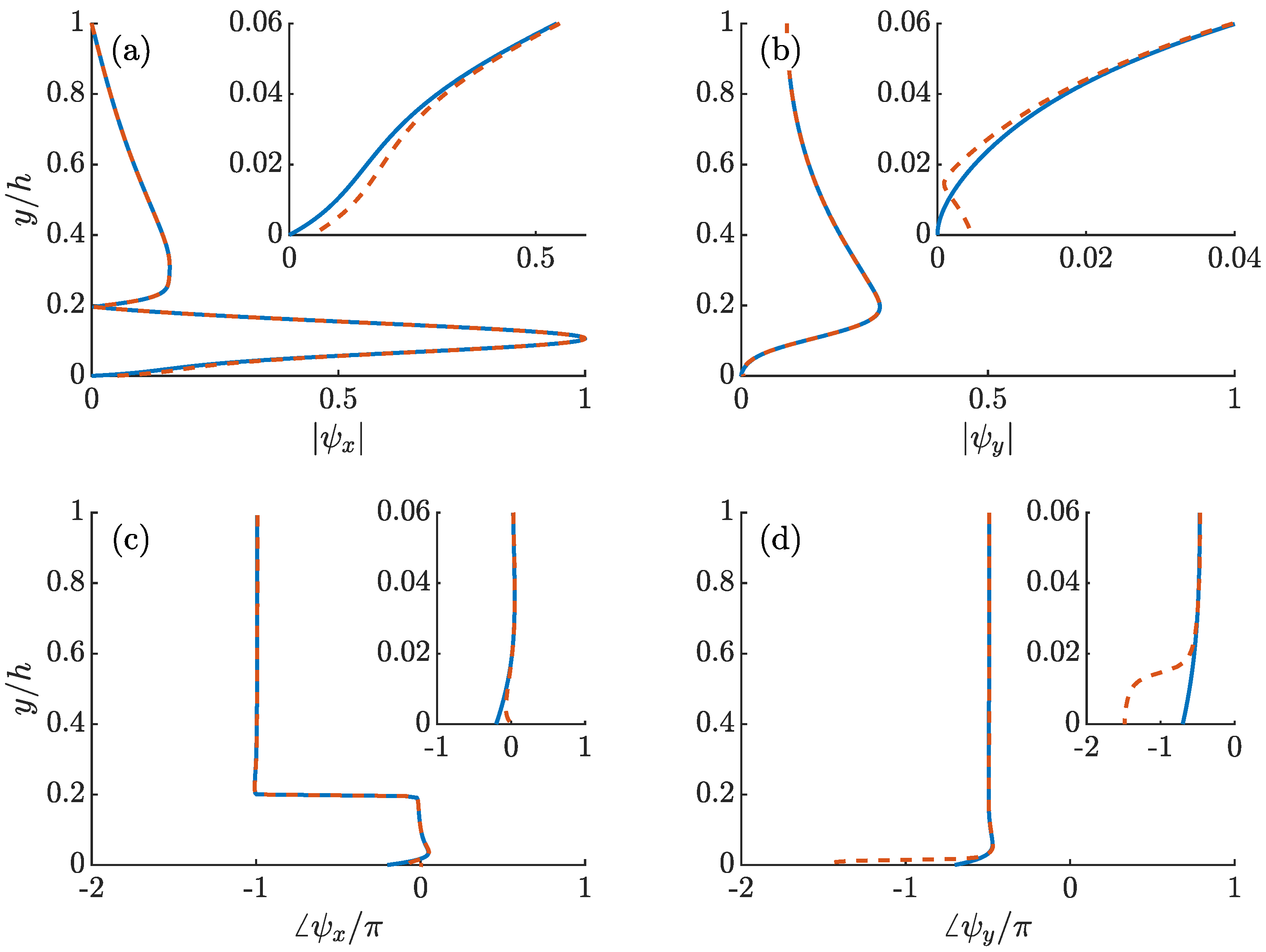
Since the experimental results for RW and CW lead to the identification of different
values, which strongly affects the peaks locations of the experimental Fourier modes, the RW and CW results are not compared directly with each other to determine the effect of the compliant wall. Instead, the resolvent modes with the same wavenumbers are used to isolate and identify the effect of the compliant wall in
Figure 9.
The compliant wall with wall-admittance
is very close to a rigid wall; in the resolvent prediction in
Figure 9, the RW and CW mode shapes match very well except in the near wall region. Very close to the wall, the amplitude of the streamwise resolvent mode for the CW deviates from the RW case and has a non-zero value at the wall as a result of the CW boundary condition given by Equation (
11). For the wall-normal modes,
has a
jump very near the wall for the CW, while the RW mode has much less variation. This can be understood via the wall-admittance term in Equation (
19). For a purely imaginary
Y (with a positive imaginary part), the phase difference between
and
is required to be
at the wall. Outside the near-wall region,
and
have been observed to have a nearly constant phase difference of
[
30]. Furthermore, Luhar et al. [
30] showed that the pressure modes are essentially constant throughout the entire domain. Then in order to satisfy the phase boundary condition with an imaginary
Y,
is required to undergo a
phase jump near the wall, as seen in the inset of
Figure 9d. A signature can also be seen in the amplitude of
, as shown in the inset of
Figure 9b. Looking near
, a local minimum is seen in
, concurrent with the
phase jump. These features were observed in previous resolvent-based opposition control studies [
31]. From the perspective of the resolvent framework, the purely elastic wall mimics the action of the wall transpiration in an opposition control scheme, where wall jets oppose the vertical velocity at a detection plane near the wall, enforcing a
phase jump and establishing a ‘virtual wall’.
Unlike the resolvent prediction, the near-wall amplitude of
for the CW in the inset of
Figure 8b does not exhibit a virtual wall signature. This may be due to the fact that a Fourier analysis in
x assumes homogeneity in
x. This is not strictly true, as the boundary layer flow is developing in the streamwise direction and, potentially more relevant, the gelatin sample was not perfectly smooth nor were the surface deformations limited to
-
waves.
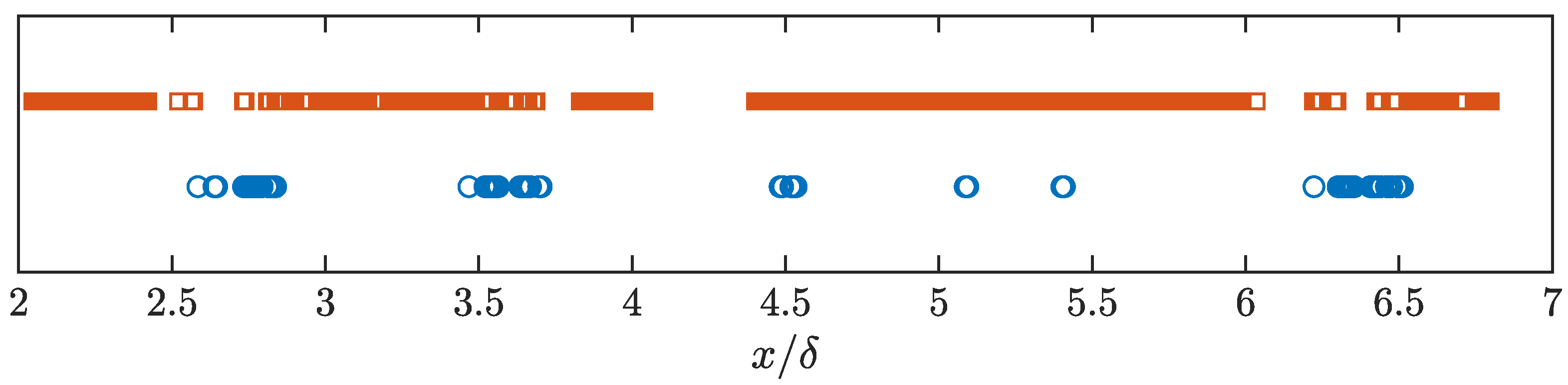
To circumvent the streamwise inhomogeneity of the flow and surface, a conditional average along
x was devised based on the anticipated cusp feature of
. The wall-normal gradient of
was calculated at each streamwise location, the data were conditioned on whether the first three points from the wall had a negative gradient, i.e.,
. This condition was applied to both the RW and CW data for
and for actuation condition iii to check for any systematic bias. The
x locations where this condition was satisfied are plotted in
Figure 10 for both the RW and CW data. 10% of the RW data met the criterion, while 64% of the CW data satisfied the condition. This statistically significant increase suggests a change to a physical structure close to the wall between the RW and CW cases.
Before averaging across observations in which the cusp criterion was satisfied, the cusp location was estimated by the near-wall zero-crossing of for each x. The profiles and were shifted in y such that the cusp point occurred at the same wall-normal location, . Finally, the shifted profiles were averaged together, yielding and . Note that phase information is lost in this process, while variation in the wall-normal locations of the cusplike features that would be masked in a simple averaging is retained. Efforts were made to develop an analogous procedure for the mode phases, but were hindered by noise in the data.
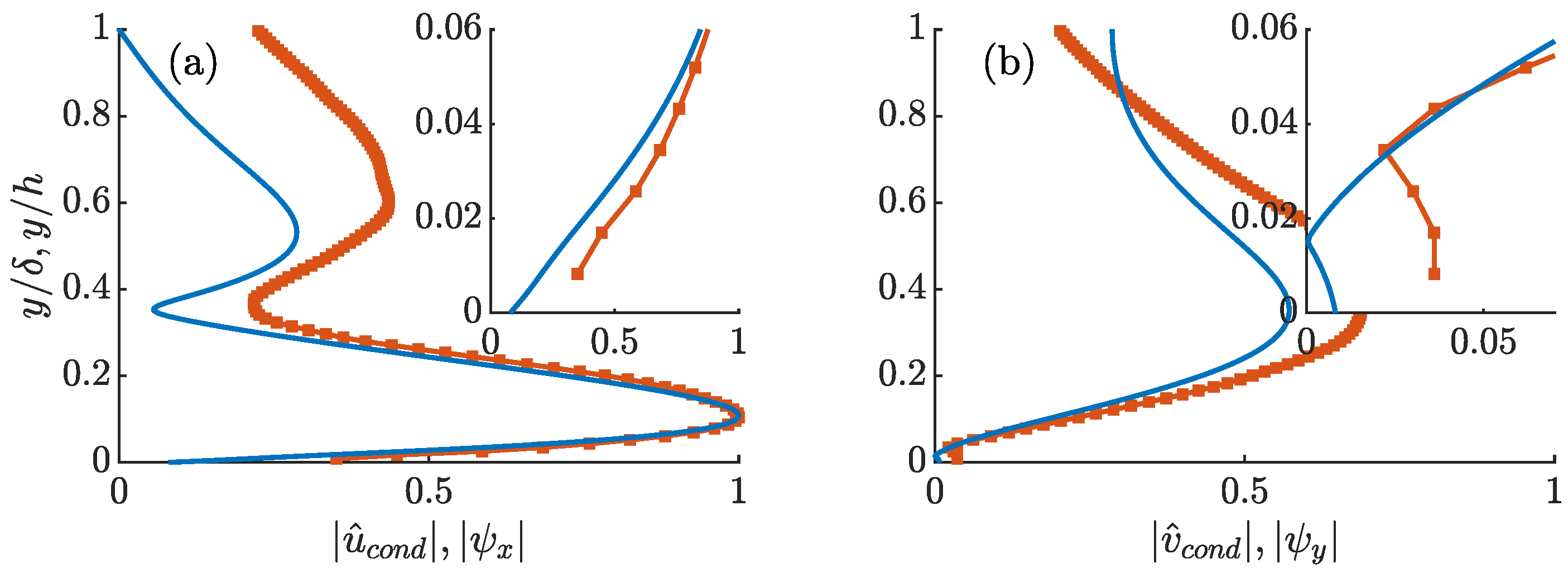
The conditionally averaged mode amplitudes for the CW case,
and
, are plotted in
Figure 11 in comparison with the resolvent modes with eddy viscosity. They are nearly identical to the
-
Fourier mode amplitudes except in the near-wall region. The near-wall region of
is shown in the insets of
Figure 11b, where a clear cusp feature is now observed. The averaging procedure was conditioned on this feature, so its presence is not unexpected. However, the similarity to the
mode is quite striking and is given more weight by 64% of the profiles containing this characteristic. The
y-location and amplitude at the cusp of
do not agree well with the resolvent predictions as shown in the inset of
Figure 11b. This is at least partly due to the conditional averaging process that shifts the profiles at each
x station in the wall-normal direction to line up the cusp locations, and also likely due to the spatial development of the boundary layer in the streamwise direction. Nonetheless, when combined with the observed phase variation of
in
Figure 8d, the experimental results confirm the conclusion from the resolvent analysis that the effect of the compliant wall on the synthetic flow mode is analogous to the sustenance of a virtual wall.
3.4. Compliant Wall as a Boundary Forcing
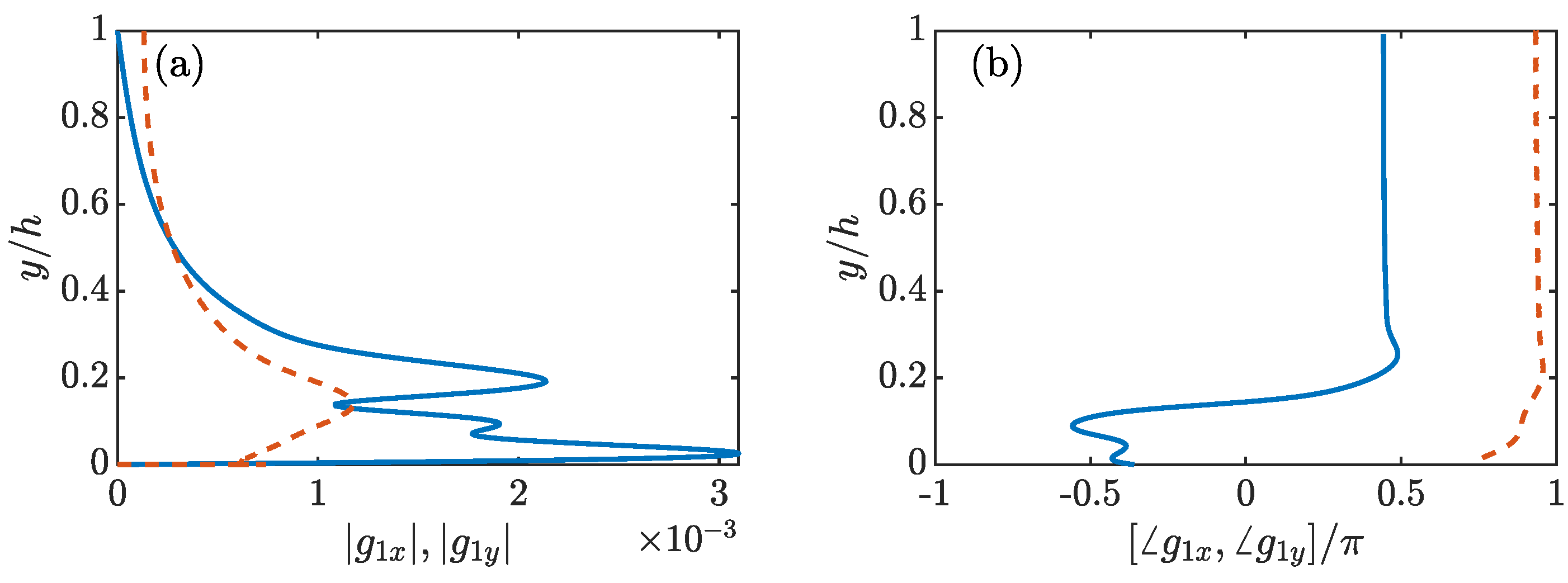
Turning back now to the treatment of the compliant wall boundary condition as a forcing to the rigid wall resolvent system, the amplitude and phase of the
component of the boundary forcing for the relevant parameters of the experiment are plotted in
Figure 12. As previously explained, the form of
is not unique, and is therefore not plotted here. Because the wall with admittance of
is close to being rigid, the changes due to the compliant wall boundary conditions are small, as observed previously in
Figure 9. As a result, the magnitude of the
component of the boundary forcing is very small.
In order to examine the effect of
and
, we will examine the change in response they induce,
and
, by plotting and comparing the magnitudes of three quantities in
Figure 13. The first quantity is the non-normalized response for the RW case denoted as
plotted in solid blue lines as reference. Additionally, the streamwise, spanwise velocities and the pressure of
and
, which capture the changes due to the
and
components of the boundary forcing are plotted.
has very little effect on the response mode in the streamwise and spanwise directions, however, the wall pressure amplitude is increased by a small amount relative to the RW case.
, on the other hand, accounts for most of the change in mode shape, including the non-zero boundary values and the local minimum in
. As shown in Equation (28),
arises because of the difference in the operator between the smooth and rough wall cases,
, i.e., the difference in imposed boundary conditions.
As previously explained, the role of
is to change the forcing mode shape to maximize the amplitude of the output, which is given by the singular value
. For a case where the effect of the boundary condition is to reduce
,
acts to reduce the impact of that boundary condition. For example, in the case of a compliant wall that reduces
,
decreases the impact of the boundary condition by reducing the wall pressure to reduce wall deformation. On the contrary, in a case where the effect of the boundary condition is to increase
,
acts to increase the impact of that boundary condition. A reduction in the singular value can be used as a indication of drag reduction and vice versa, for example in the compliant wall studies of Luhar et al. [
10] and Luhar et al. [
24], and in the riblet studies of Chavarin and Luhar [
32]. In these studies, the Fukagata–Iwamoto–Kasagi (FIK) identity [
33] that is commonly used in drag reduction studies is used to describe the relationship between changes in the response mode shapes and the singular values to model drag reduction under idealized conditions. Therefore,
can be interpreted as a term that acts to oppose drag reduction and assist drag increase. For the compliant wall with admittance of
studied here, the boundary conditions increase the singular values, and
Figure 13c shows that the amplitude of the pressure at the wall for
is indeed higher than the RW case. Future work will explore more of the parameter space and attempt to draw more universal conclusions.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}