
An Improved Conservative Direct Re-Initialization Method (ICDR) for Two-Phase Flow Simulations


Abstract
1. Introduction
2. Interface Advection Algorithm
3. Geometrical Re-Initialization
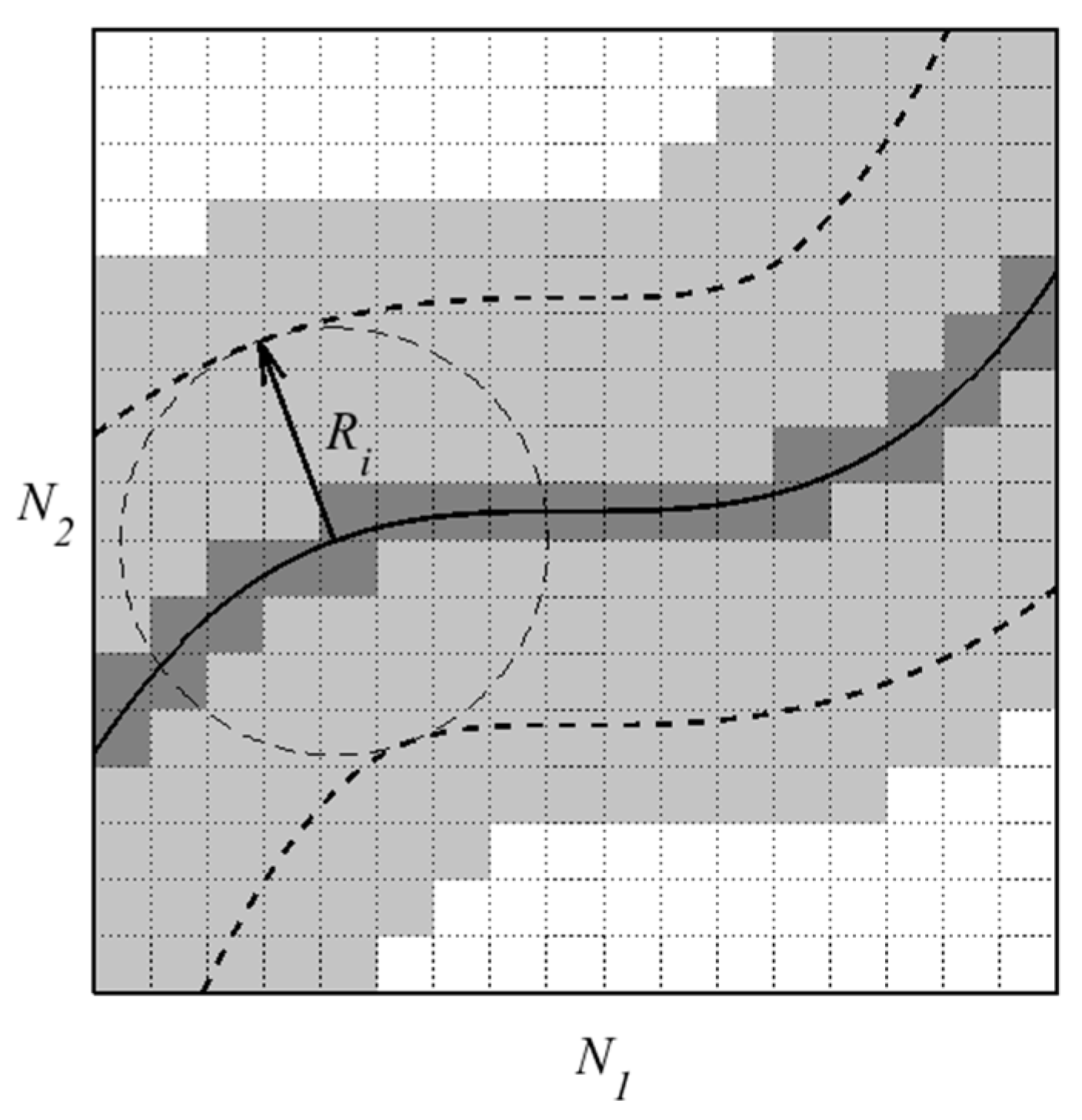
3.1. The Motivations and Preliminaries
3.2. Improved Conservative Direct Re-Initialization (ICDR)
4. Results and Discussion
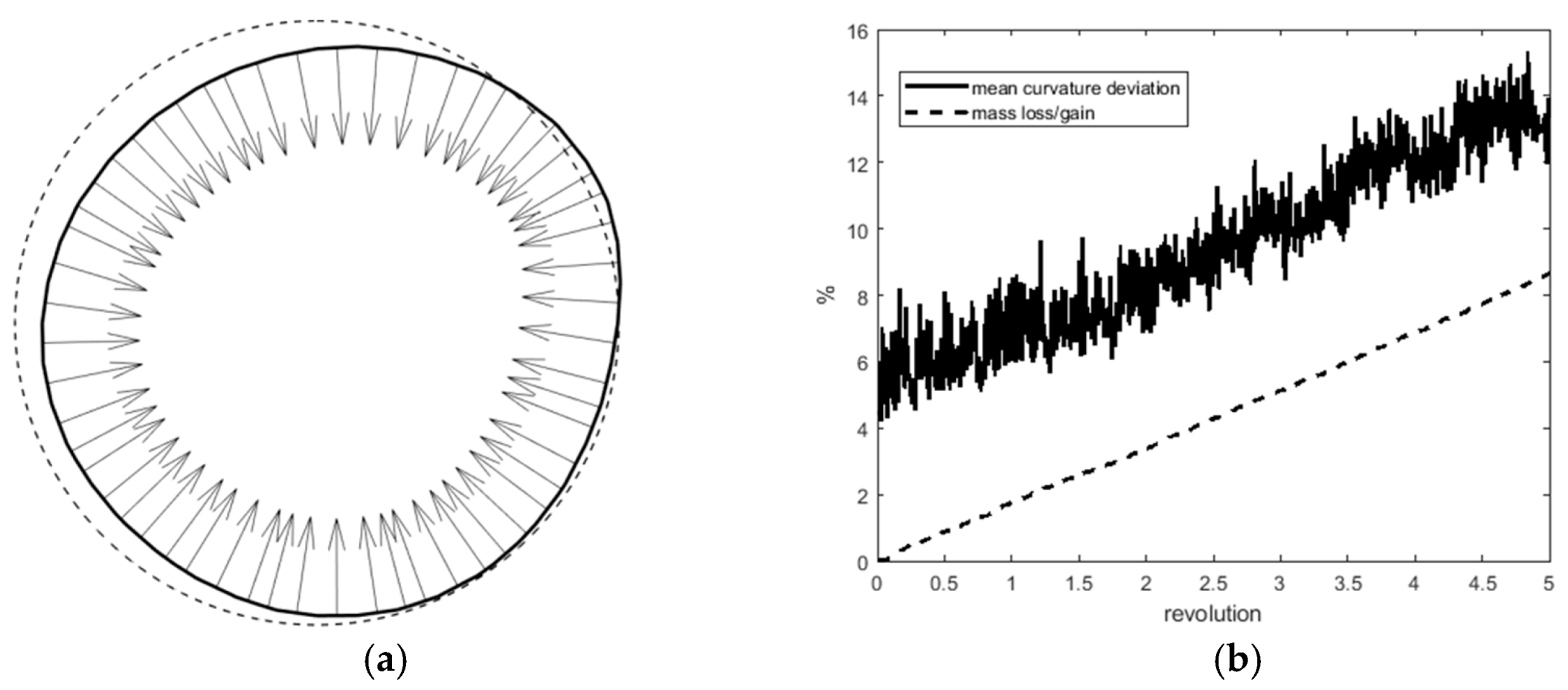
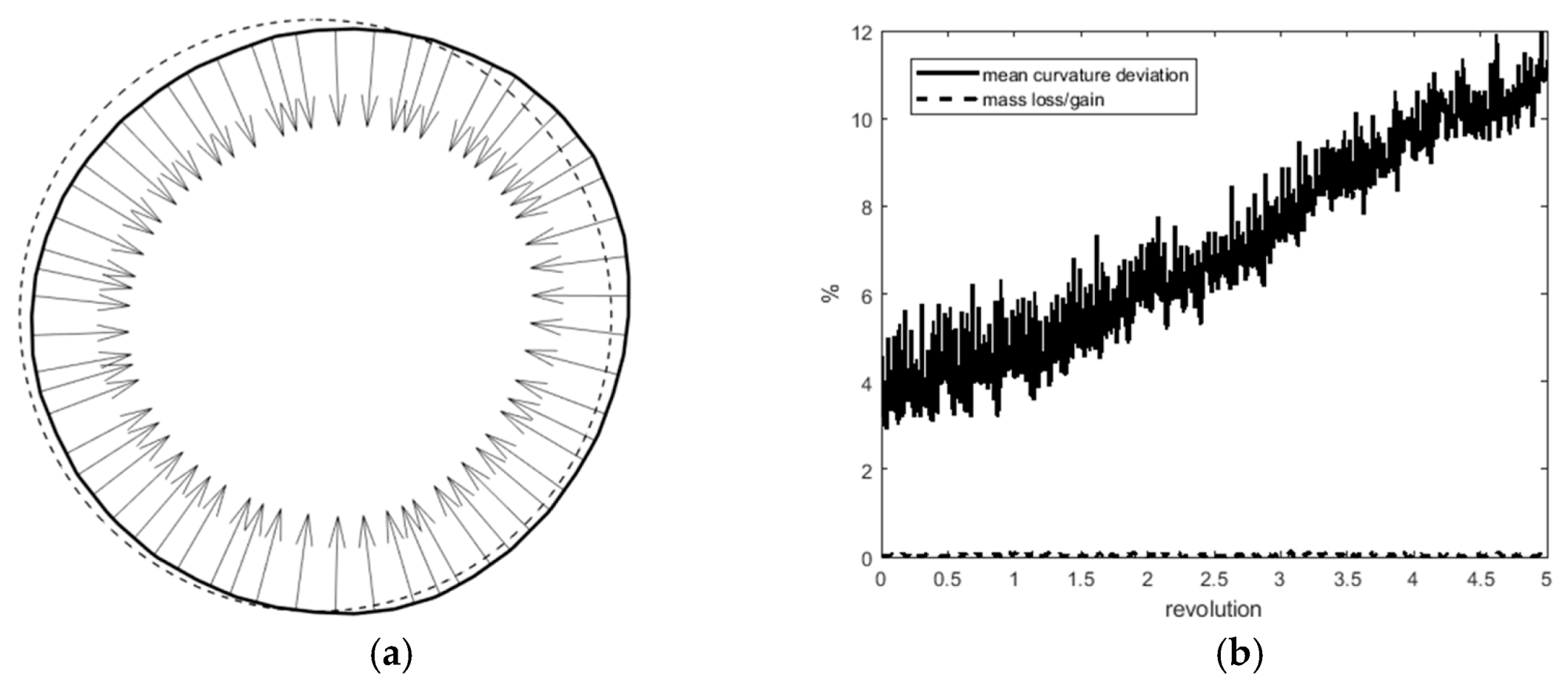
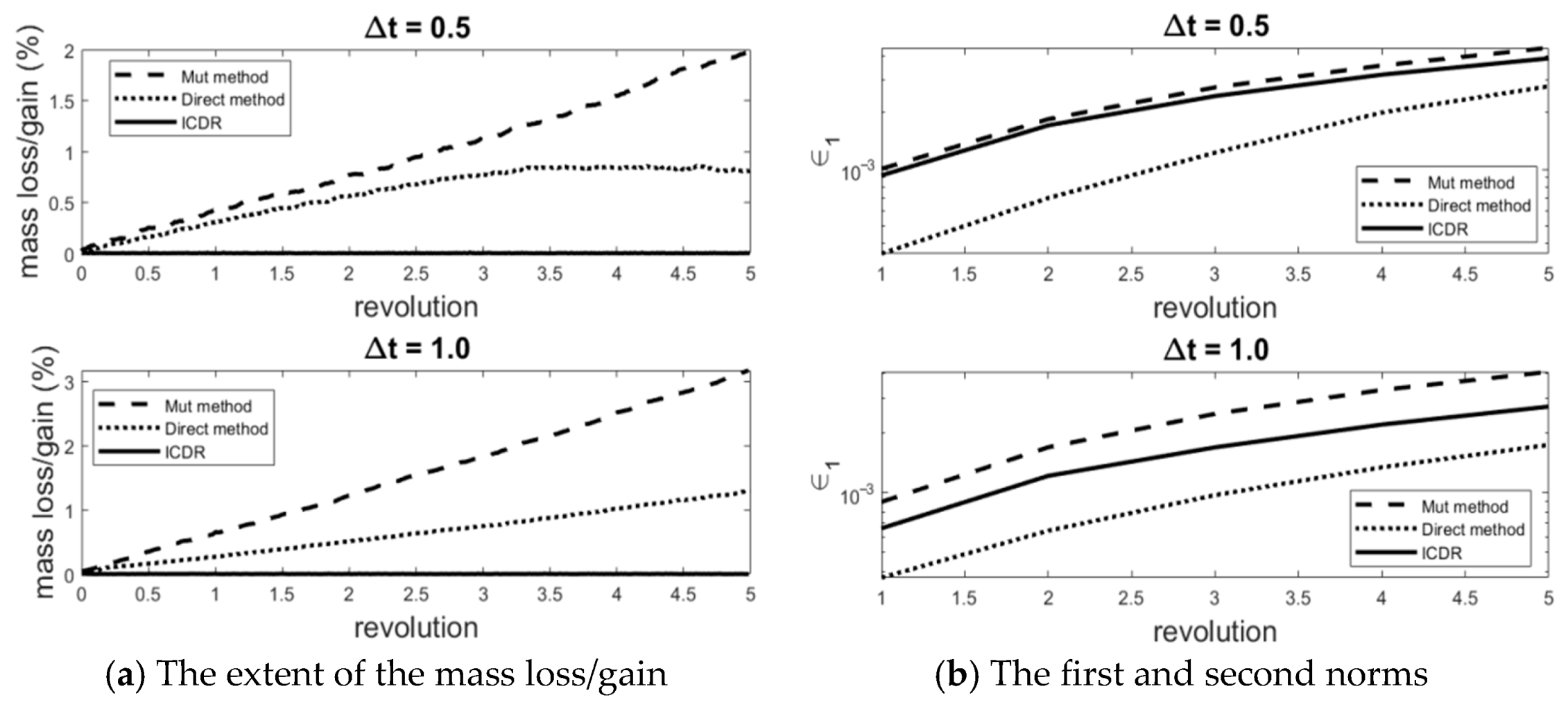
4.1. Comparison of the Geometrical Re-Initialization Methods in 2D
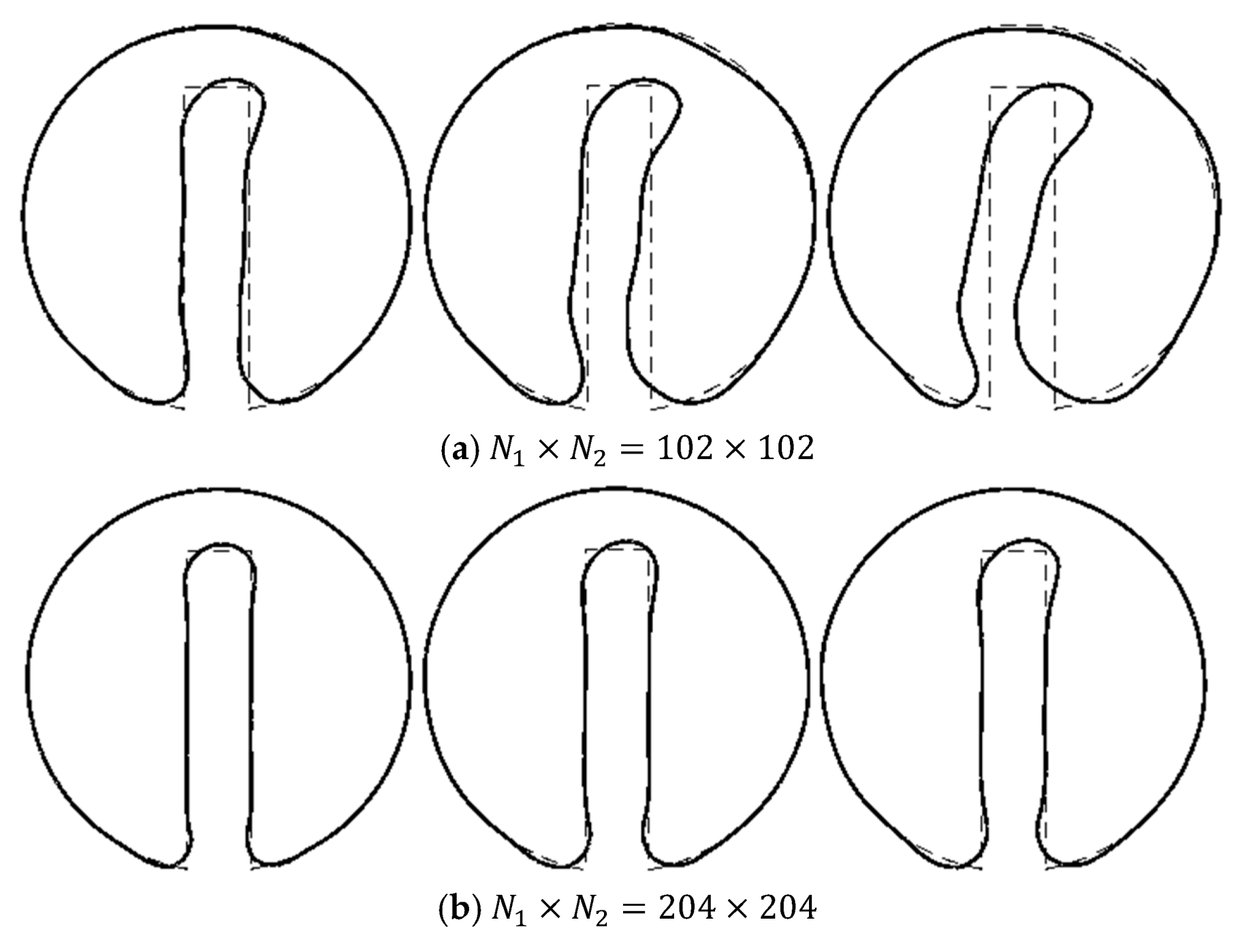
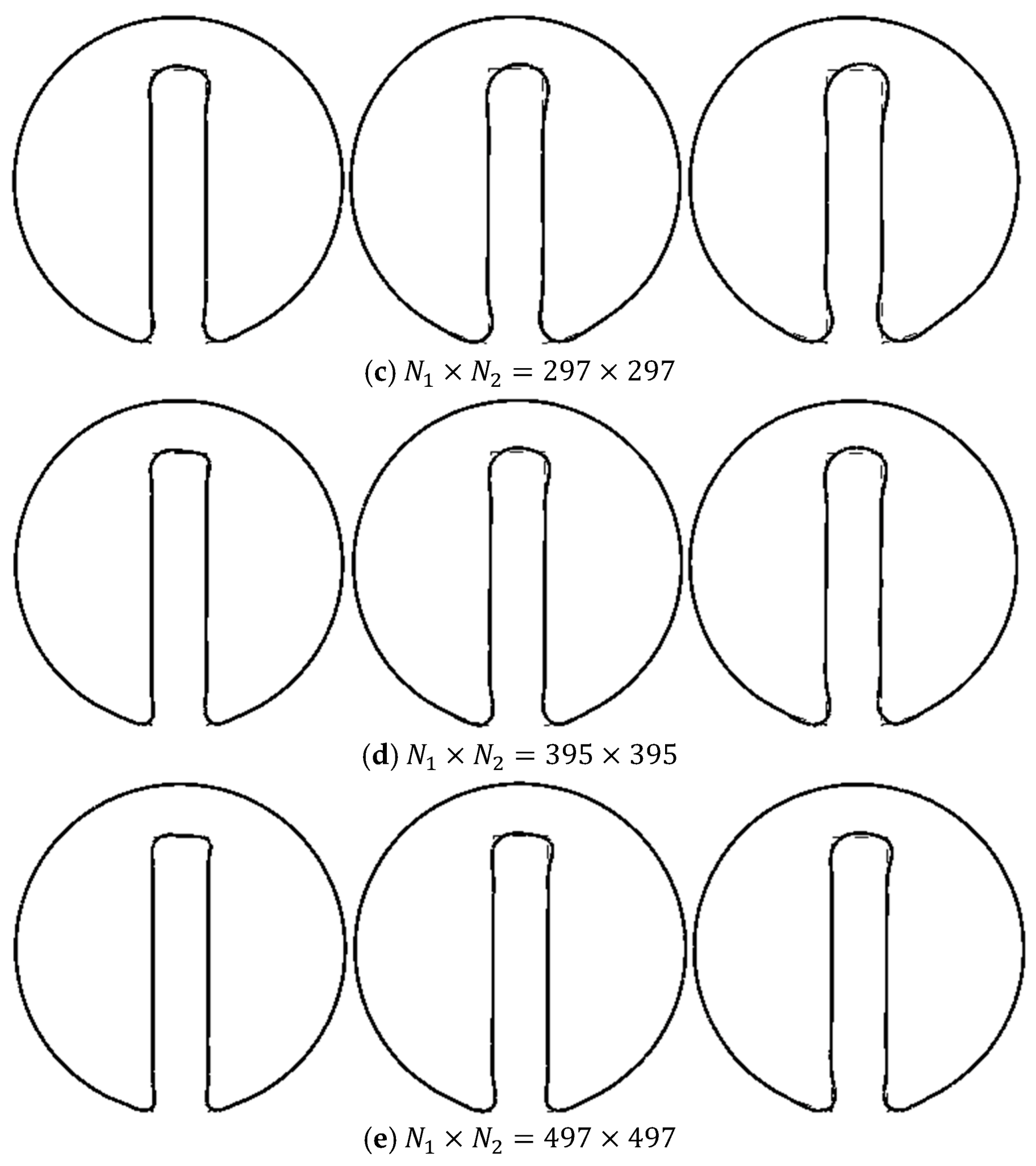
4.2. The Notched Cylinder Problem
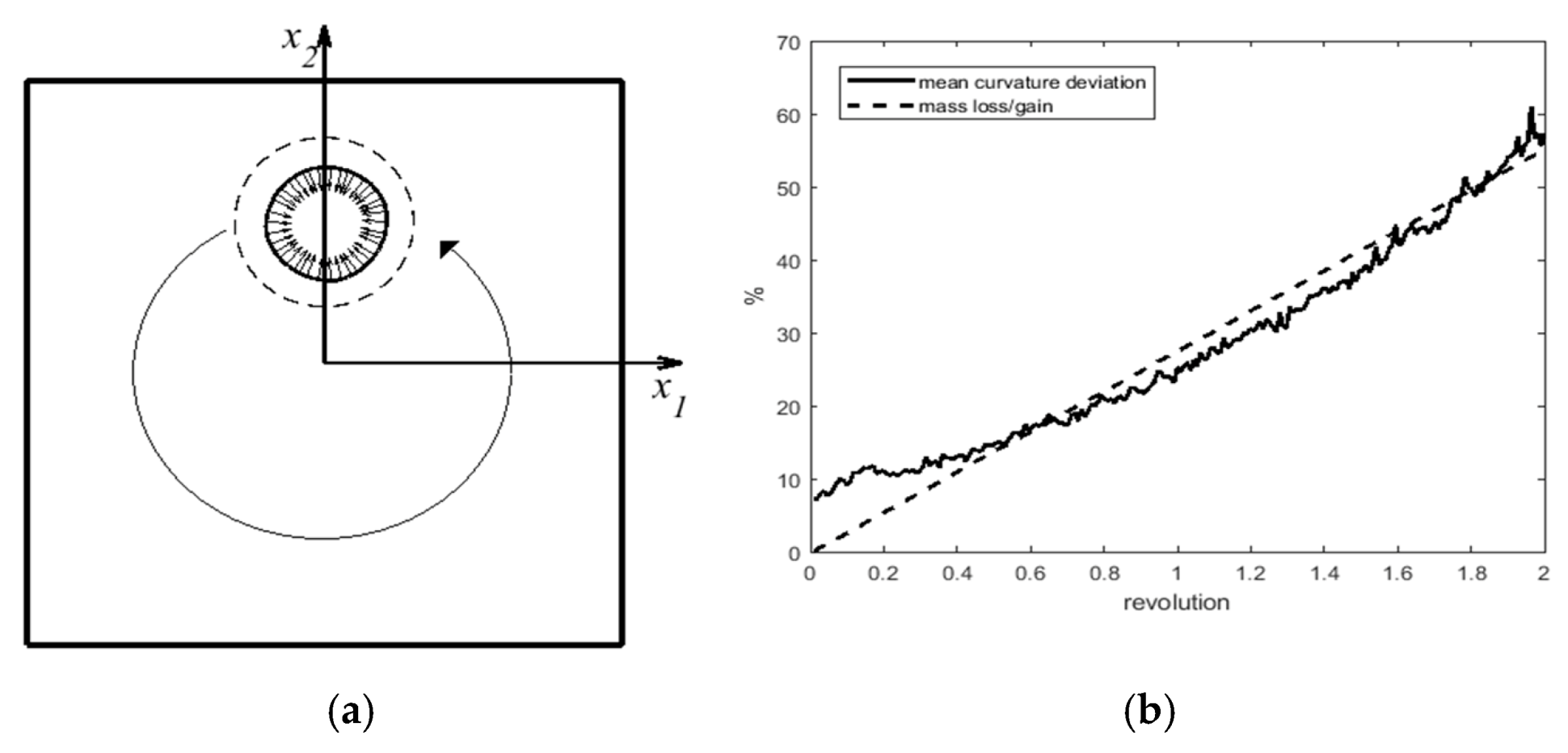
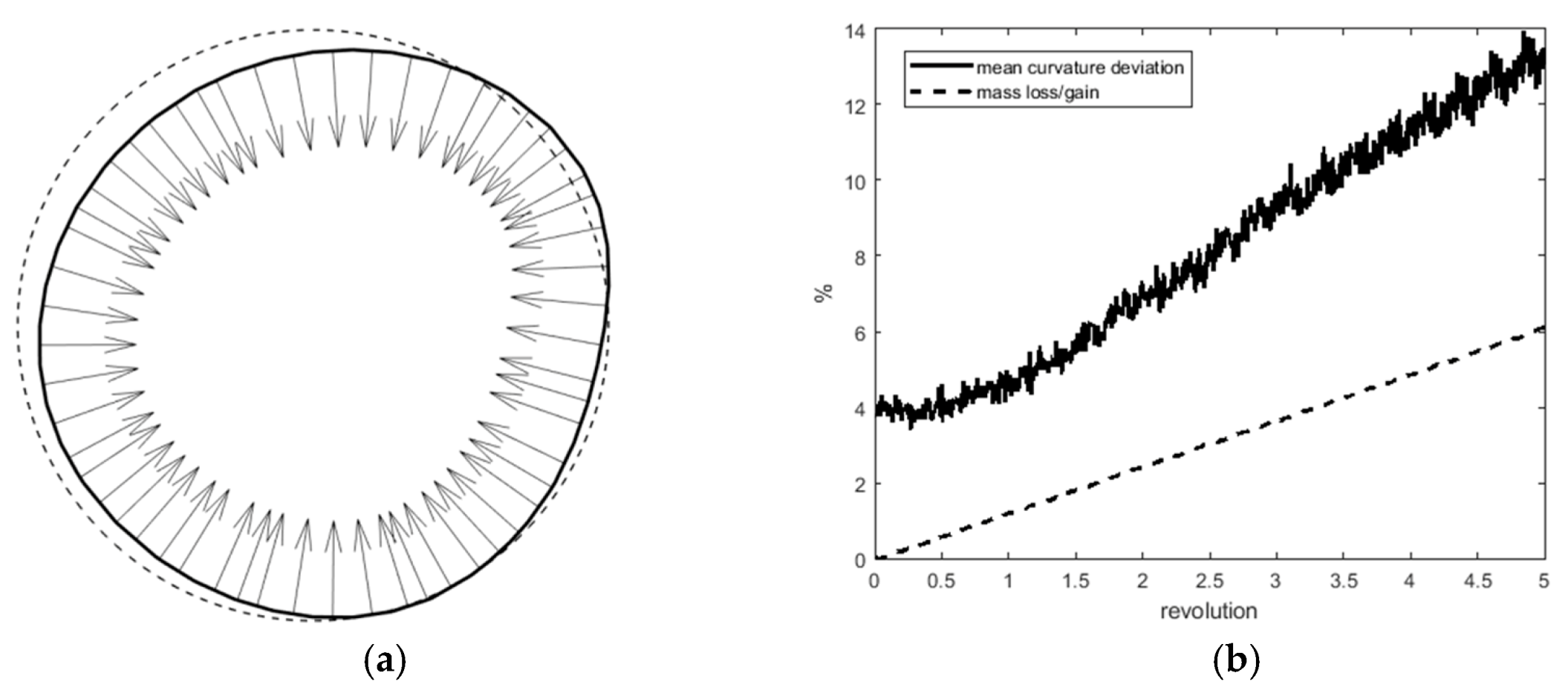
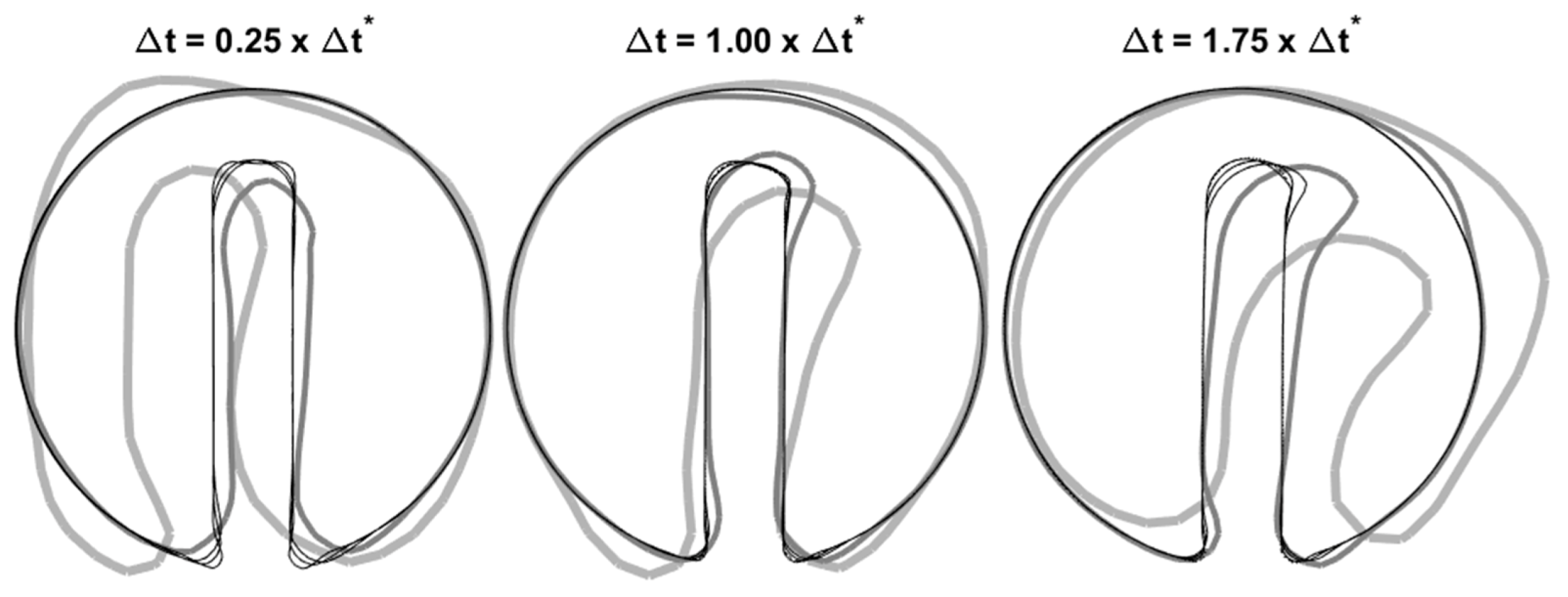
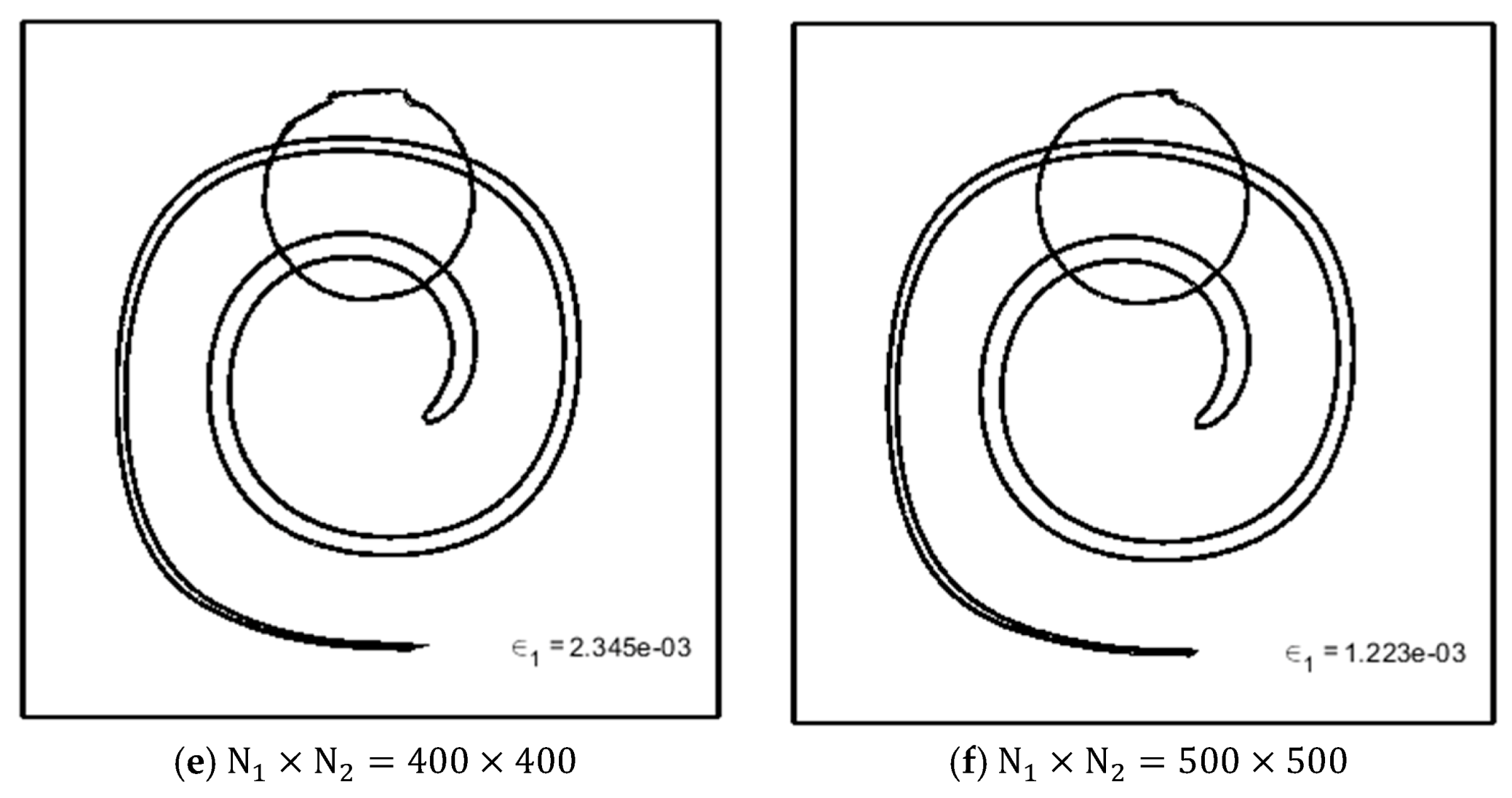
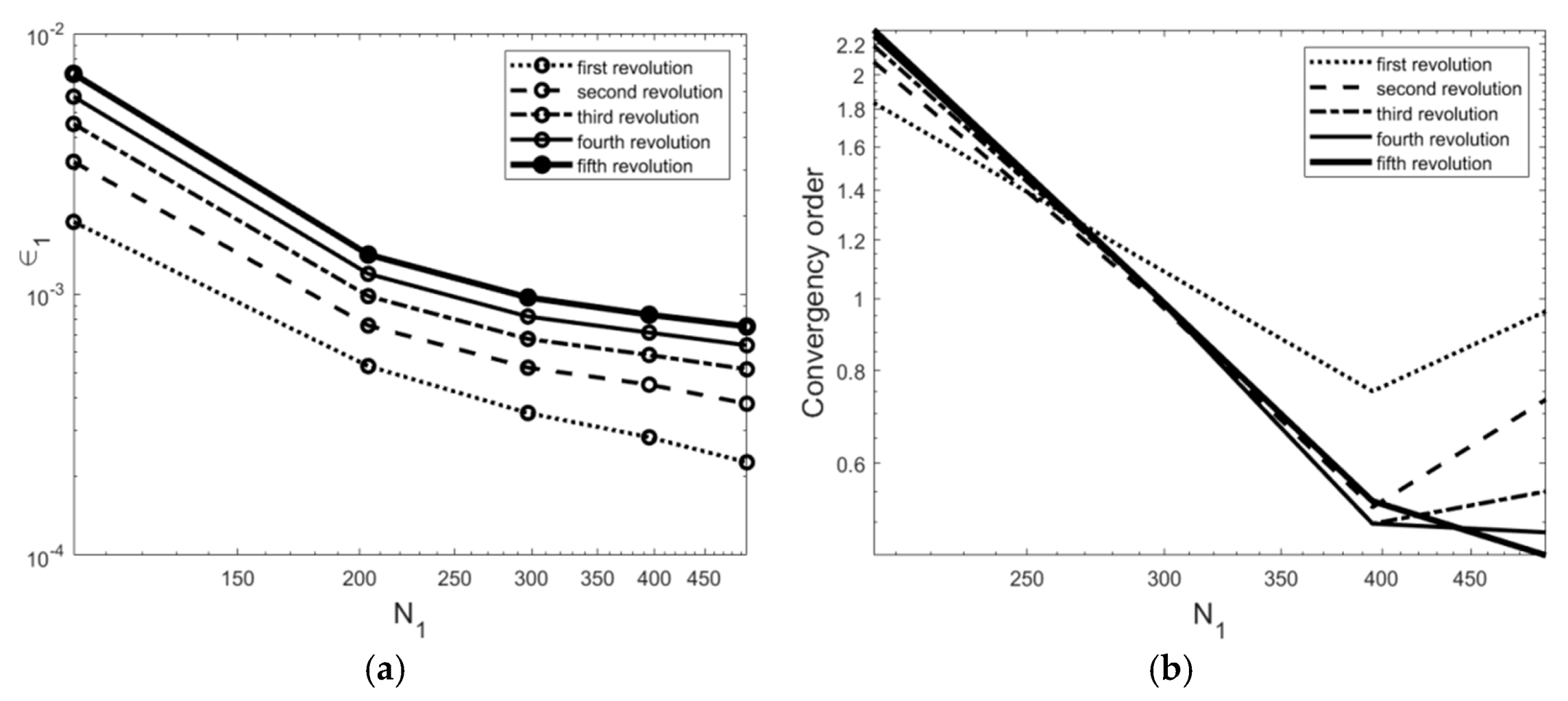
4.3. Swirling Flow Vortex
4.4. Unstructured Meshes
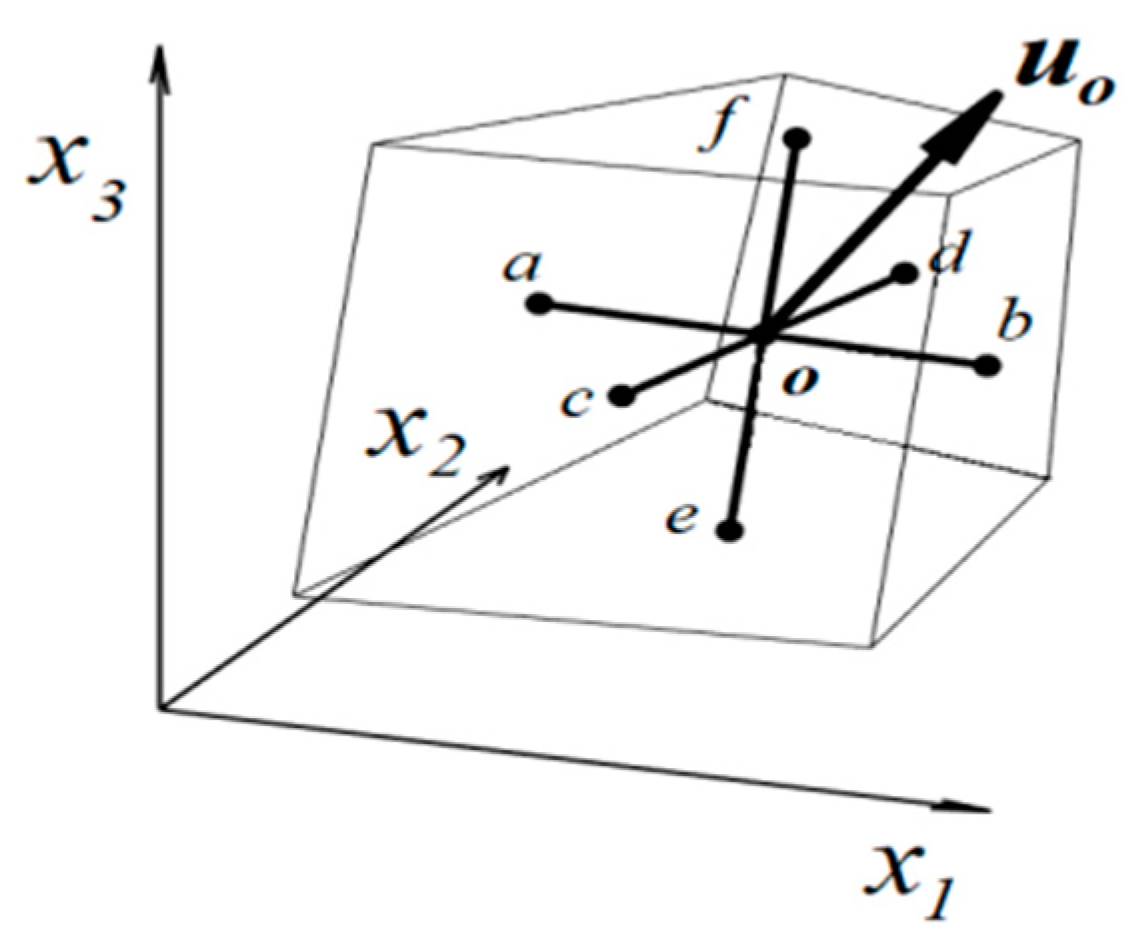
4.5. The Extension to Three-Dimensional (3D) Problems
4.5.1. Comparison of the Geometrical Re-Initialization Methods in 3D
4.5.2. Case Study for Drop Deformation with a Unit Viscosity Ratio
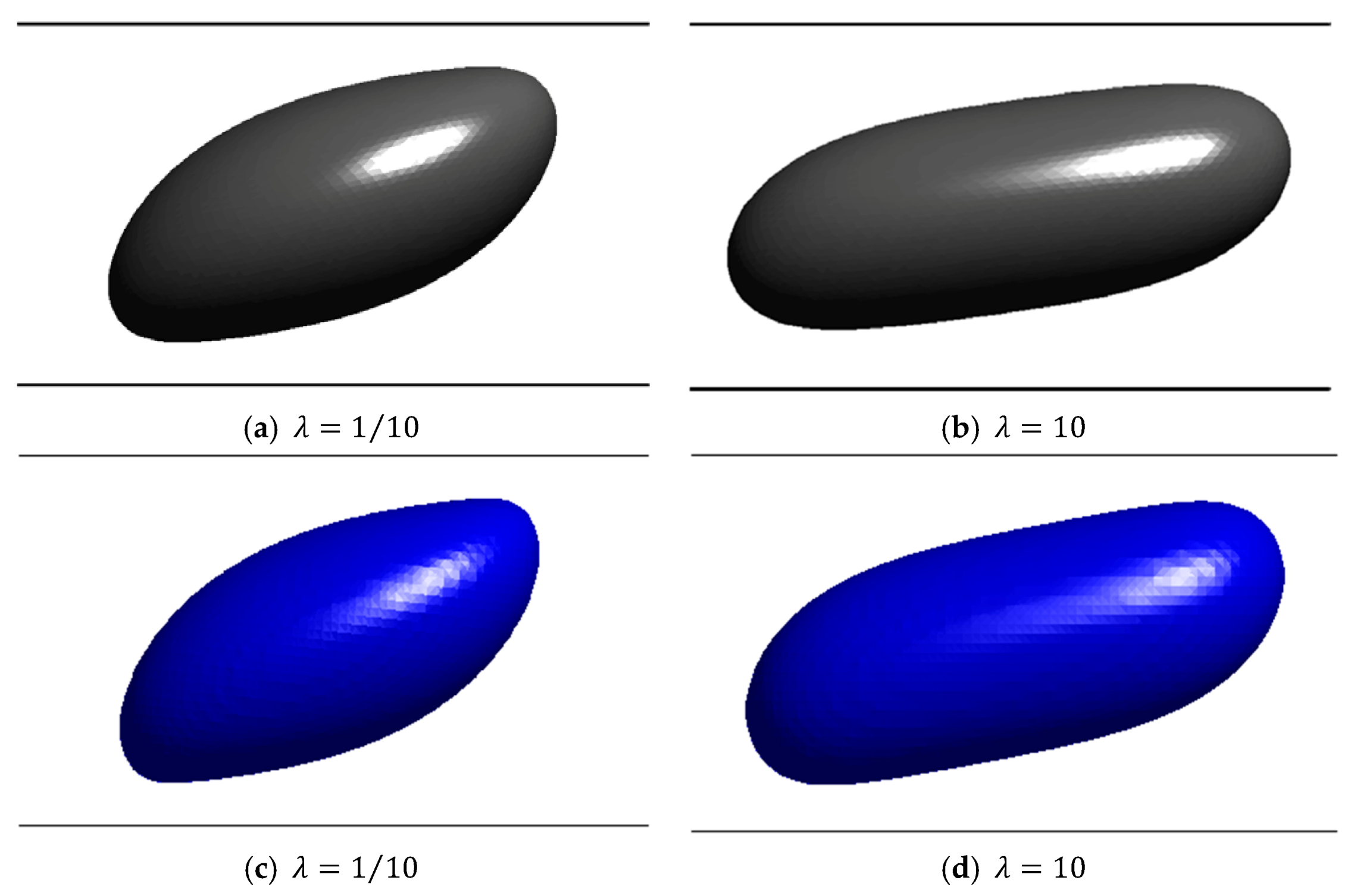
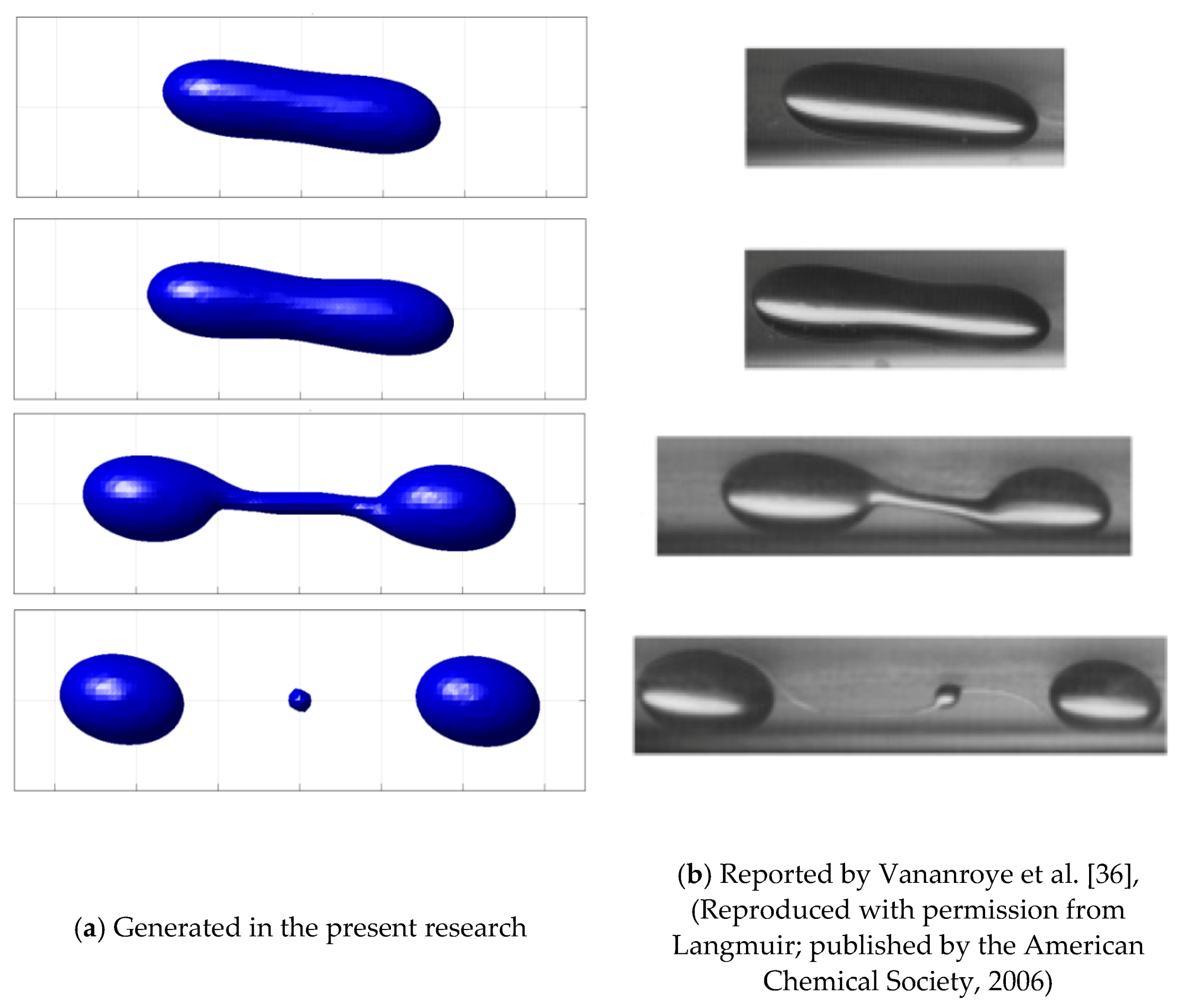
4.5.3. Case Study for Drop Deformation with Non-Unit Viscosity Ratios
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Osher, S.; Sethian, J.A. Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Pilliod, J.E., Jr.; Puckett, E.G. Second-order accurate volume-of-fluid algorithms for tracking material interfaces. J. Comput. Phys. 2004, 199, 465–502. [Google Scholar] [CrossRef]
- Pilliod, J.; Puckett, E. An unsplit, second-order accurate Godunov method for tracking deflagrations and detonations. In Proceedings of the 21st International Symposium on Shock Waves, Center for Hypersonics, Great Keppel Island, Australia, 20–25 July 1997; pp. 1053–1058. [Google Scholar]
- Puckett, E. On the second-order accuracy of volume-of-fluid interface reconstruction algorithms: Convergence in the max norm. Commun. Appl. Math. Comput. Sci. 2010, 5, 99–148. [Google Scholar] [CrossRef]
- Puckett, E.A. Volume-of-fluid interface reconstruction algorithm that is second-order accurate in the max norm. Commun. Appl. Math. Comput. Sci. 2010, 5, 199–220. [Google Scholar] [CrossRef][Green Version]
- Mostafaiyan, M.; Wießner, S.; Heinrich, G.; Hosseini, M.S.; Domurath, J.; Khonakdar, H.A. Application of local least squares finite element method (LLSFEM) in the interface capturing of two-phase flow systems. Comput. Fluids 2018, 174, 110–121. [Google Scholar] [CrossRef]
- Smereka, P.; Sussman, M.; Osher, S. A levelset approach for computing solutions to incompressible two-phase flow. J. Comput. Phys. 1994, 114, 1006. [Google Scholar]
- Chang, Y.-C.; Hou, T.; Merriman, B.; Osher, S. A level set formulation of Eulerian interface capturing methods for incompressible fluid flows. J. Comput. Phys. 1996, 124, 449–464. [Google Scholar] [CrossRef]
- Sussman, M.; Fatemi, E.; Smereka, P.; Osher, S. An improved level set method for incompressible two-phase flows. Comput. Fluids 1998, 27, 663–680. [Google Scholar] [CrossRef]
- Sussman, M.; Fatemi, E. An efficient, interface-preserving level set redistancing algorithm and its application to interfacial incompressible fluid flow. SIAM J. Sci. Comput. 1999, 20, 1165–1191. [Google Scholar] [CrossRef]
- Yap, Y.; Chai, J.; Wong, T.; Toh, K.; Zhang, H. A global mass correction scheme for the level-set method. Numeric. Heat Transf. Part B Fundam. 2006, 50, 455–472. [Google Scholar] [CrossRef]
- Ville, L.; Silva, L.; Coupez, T. Convected level set method for the numerical simulation of fluid buckling. Int. J. Numeric. Methods Fluids 2011, 66, 324–344. [Google Scholar] [CrossRef]
- Olsson, E.; Kreiss, G. A conservative level set method for two phase flow. J. Comput. Phys. 2005, 210, 225–246. [Google Scholar] [CrossRef]
- Olsson, E.; Kreiss, G.; Zahedi, S.A. conservative level set method for two phase flow II. J Comput. Phys 2007, 225, 785–807. [Google Scholar] [CrossRef]
- Harten, A. The artificial compression method for computation of shocks and contact discontinuities. I. Single conservation laws. Commun. Pure App. Math. 1977, 30, 611–638. [Google Scholar] [CrossRef]
- Zhao, L.; Mao, J.; Bai, X.; Liu, X.; Li, T.; Williams, J. Finite element implementation of an improved conservative level set method for two-phase flow. Comput. Fluids 2014, 100, 138–154. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, X.; Li, T.; Williams, J. Improved conservative level set method. Int. J. Numeric. Methods Fluids 2014, 75, 575–590. [Google Scholar] [CrossRef]
- Guermond, J.-L.; de Luna, M.Q.; Thompson, T. An conservative anti-diffusion technique for the level set method. J. Computat. Appl. Math. 2017, 321, 448–468. [Google Scholar] [CrossRef]
- Chiodi, R.; Desjardins, O. A reformulation of the conservative level set reinitialization equation for accurate and robust simulation of complex multiphase flows. J. Comput. Phys. 2017, 343, 186–200. [Google Scholar] [CrossRef]
- Enright, D.; Fedkiw, R.; Ferziger, J.; Mitchell, I. A hybrid particle level set method for improved interface capturing. J. Comput. Phys. 2002, 183, 83–116. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, J.; Stern, F. An improved particle correction procedure for the particle level set method. J. Comput. Phys. 2009, 228, 5819–5837. [Google Scholar] [CrossRef]
- Sussman, M.; Puckett, E.G. A coupled level set and volume-of-fluid method for computing 3D and axisymmetric incompressible two-phase flows. J. Comput. Phys. 2000, 162, 301–337. [Google Scholar] [CrossRef]
- Mut, F.; Buscaglia, G.C.; Dari, E.A. New mass-conserving algorithm for level set redistancing on unstructured meshes. J. Appl. Mechan. 2006, 73, 1659–1678. [Google Scholar] [CrossRef]
- Ausas, R.F.; Dari, E.A.; Buscaglia, G.C. A geometric mass-preserving redistancing scheme for the level set function. Int. J. Numeric. Methods Fluids 2011, 65, 989–1010. [Google Scholar] [CrossRef]
- Cho, M.H.; Choi, H.G.; Yoo, J.Y. A direct reinitialization approach of level-set/splitting finite element method for simulating incompressible two-phase flows. Int. J. Numeric. Methods Fluids 2011, 67, 1637–1654. [Google Scholar] [CrossRef]
- Ngo, L.C.; Choi, H.G. Efficient direct re-initialization approach of a level set method for unstructured meshes. Comput. Fluids 2017, 154, 167–183. [Google Scholar] [CrossRef]
- Chopp, D.L. Computing minimal surfaces via level set curvature flow. J. Comput. Phys. 1993, 106, 77–91. [Google Scholar] [CrossRef]
- Jiang, B.-N. The Least-Squares Finite Element Method: Theory and Applications in Computational Fluid Dynamics and Electromagnetics; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]
- Zalesak, S.T. Fully multidimensional flux-corrected transport algorithms for fluids. J. Comput. Phys. 1979, 31, 335–362. [Google Scholar] [CrossRef]
- Walker, C.; Müller, B. A conservative level set method for sharp interface multiphase flow simulation. In Proceedings of the ECCOMAS CFD, Lisbon, Portugal, 14–17 June 2010. [Google Scholar]
- Tryggvason, G.; Bunner, B.; Esmaeeli, A.; Juric, D.; Al-Rawahi, N.; Tauber, W.; Han, J.; Nas, S.; Jan, Y.-J. A front-tracking method for the computations of multiphase flow. J. Comput. Phys. 2001, 169, 708–759. [Google Scholar] [CrossRef]
- Janssen, P.; Anderson, P. Boundary-integral method for drop deformation between parallel plates. Phys. Fluids 2007, 19, 043602. [Google Scholar] [CrossRef]
- Sibillo, V.; Pasquariello, G.; Simeone, M.; Cristini, V.; Guido, S. Drop deformation in microconfined shear flow. Phys. Rev. Lett. 2006, 97, 054502. [Google Scholar] [CrossRef]
- Janssen, P.; Anderson, P. A boundary-integral model for drop deformation between two parallel plates with non-unit viscosity ratio drops. J. Comput. Phys. 2008, 227, 8807–8819. [Google Scholar] [CrossRef]
- Vananroye, A.; Van Puyvelde, P.; Moldenaers, P. Effect of confinement on droplet breakup in sheared emulsions. Langmuir 2006, 22, 3972–3974. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mostafaiyan, M.; Wießner, S.; Heinrich, G.; Hosseini, M.S. An Improved Conservative Direct Re-Initialization Method (ICDR) for Two-Phase Flow Simulations. Fluids 2021, 6, 261. https://doi.org/10.3390/fluids6070261
Mostafaiyan M, Wießner S, Heinrich G, Hosseini MS. An Improved Conservative Direct Re-Initialization Method (ICDR) for Two-Phase Flow Simulations. Fluids. 2021; 6(7):261. https://doi.org/10.3390/fluids6070261
Chicago/Turabian StyleMostafaiyan, Mehdi, Sven Wießner, Gert Heinrich, and Mahdi Salami Hosseini. 2021. "An Improved Conservative Direct Re-Initialization Method (ICDR) for Two-Phase Flow Simulations" Fluids 6, no. 7: 261. https://doi.org/10.3390/fluids6070261
APA StyleMostafaiyan, M., Wießner, S., Heinrich, G., & Hosseini, M. S. (2021). An Improved Conservative Direct Re-Initialization Method (ICDR) for Two-Phase Flow Simulations. Fluids, 6(7), 261. https://doi.org/10.3390/fluids6070261