
Small-Scale Rotor Aeroacoustics for Drone Propulsion: A Review of Noise Sources and Control Strategies


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
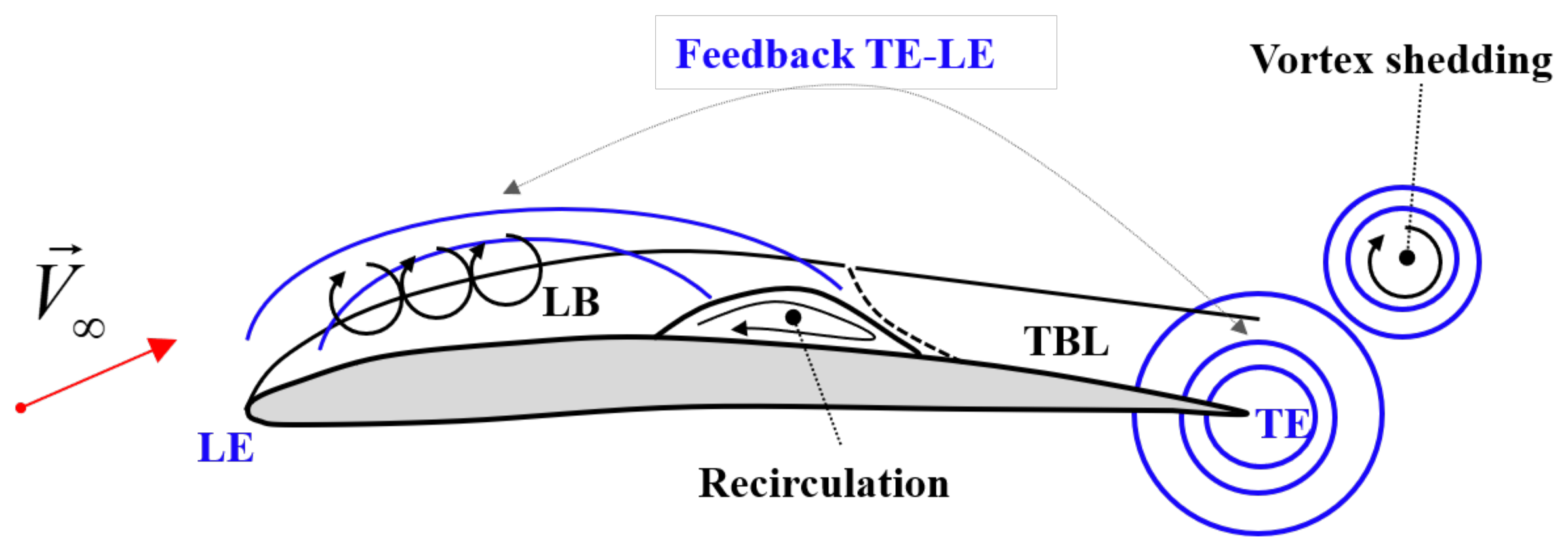
2.1. Noise Modelling: Tonal and Broad-Band
- a is the speed of sound;
- is the perturbation on the static pressure;
- t is the observer time;
- are the components of the position vector;
- are the components of the Lighthill stress tensor;
- is the air density;
- is the components of the source velocity vector;
- is Kronecker’s delta function;
- f is a function that defines the surface of the body producing the pressure wave;
- are the components of the generalized stress tensor.
- is the position vector of an observer relative to the k-point noise source ,;
- is the aerodynamic force on the k-point blade element of volume ;
- is a scalar magnitude that represents the component of the Mach vector on .

2.2. Noise Reduction Strategies
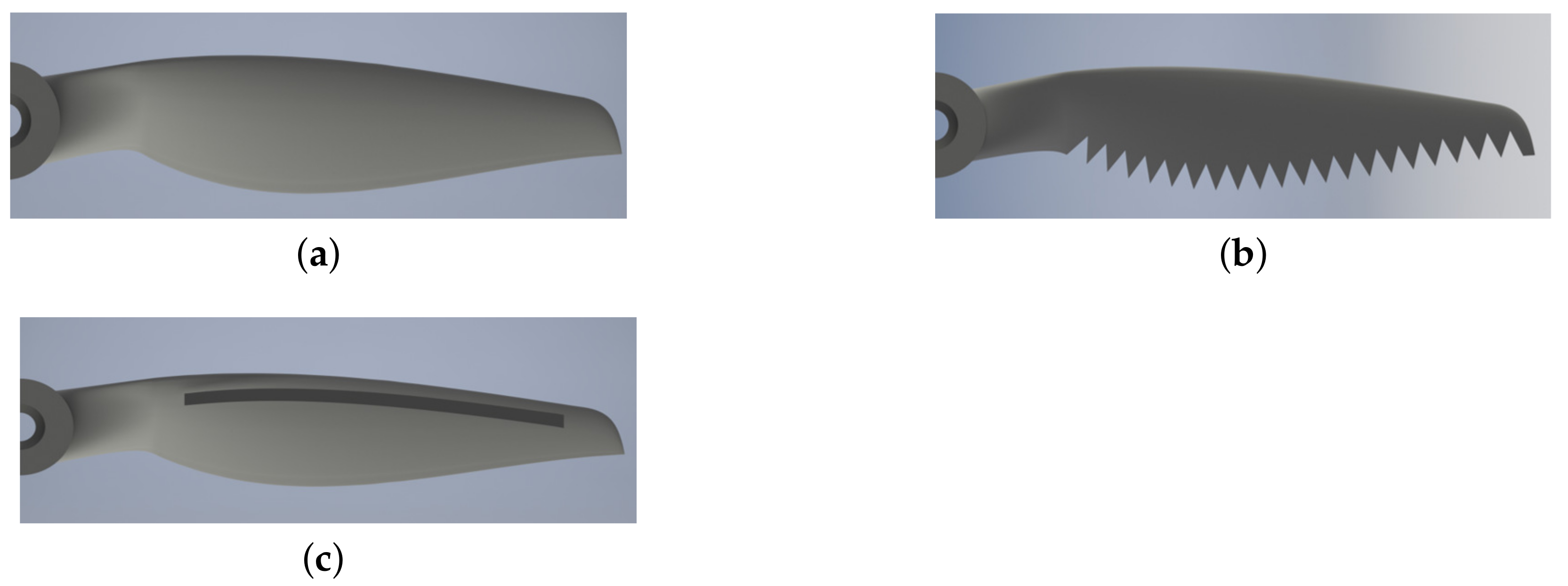
2.2.1. Optimized Geometry
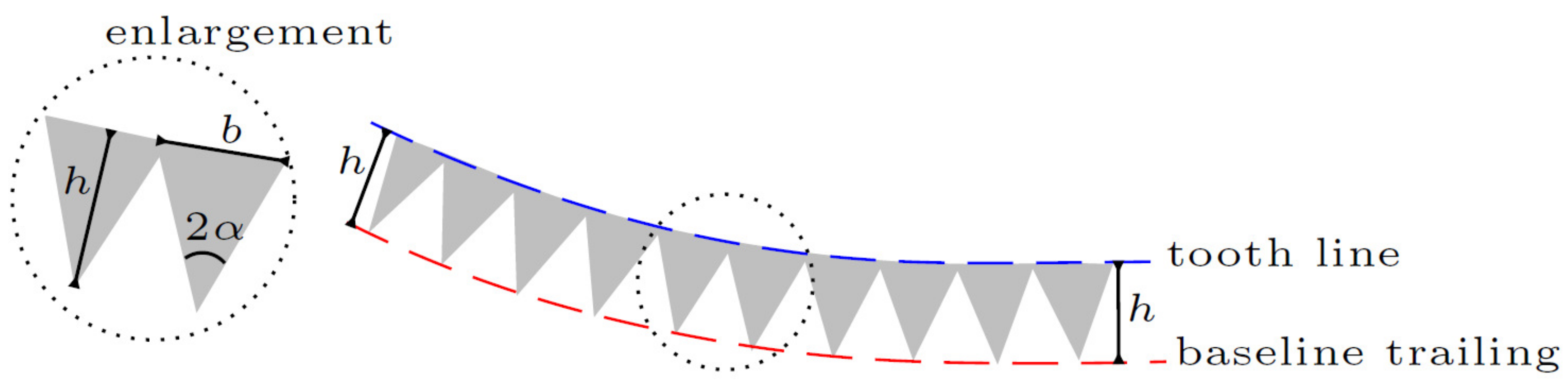
2.2.2. Serrated Trailing Edge
- The non-dimensional tooth height, defined as the ratio between the tooth half-height and the boundary layer thickness ;
- The aspect ratio of the tooth, defined as the ratio between the width and the half-height ;
- The boundary layer thickness-based Strouhal number .
2.2.3. Leading Edge Serration
2.2.4. Boundary Layer Tripping System
2.2.5. Porous Material Inserts
2.2.6. Metamaterials
2.2.7. Bio-Inspired Blade Shape
2.2.8. Active Control Strategy: Synchrophaser
3. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MAV | Micro Aerial Vehicles |
| UAV | Unmanned Aerial Vehicle |
| UAS | Unmanned Aerial System |
| MDO | Multi Disciplinary optimization |
| STE | Serrated Trailing Edge |
| TE | Trailing Edge |
| LE | Leading Edge |
| TBL | Turbulent Boundary Layer |
| LBL | Laminar Boundary Layer |
| UOM | Ultra-Open Metamaterial |
References
- Floreano, D.; Wood, R.J. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460–466. [Google Scholar] [CrossRef] [PubMed]
- Figliozzi, M. Lifecycle modeling and assessment of unmanned aerial vehicles (Drones) CO2e emissions. Transp. Res. Part D Transp. Environ. 2017, 57, 251–261. [Google Scholar] [CrossRef]
- Yoo, W.; Yu, E.; Jung, J. Drone delivery: Factors affecting the public’s attitude and intention to adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar] [CrossRef]
- Koiwanit, J. Analysis of environmental impacts of drone delivery on an online shopping system. Adv. Clim. Change Res. 2018, 9, 201–207. [Google Scholar] [CrossRef]
- Goodchild, A.; Toy, J. Delivery by drone: An evaluation of unmanned aerial vehicle technology in reducing CO2 emissions in the delivery service industry. Transp. Res. Part D Transp. Environ. 2018, 61, 58–67. [Google Scholar] [CrossRef]
- EASA. Introduction of a Regulatory Framework for the Operation of Unmanned Aircraft Systems in the ‘Open’ and ‘Specific’ Categories; Opinion No 01/2018; EASA: Nairobi, Kenya, 2018.
- Cherney, M. Delivery Drones Cheer Shoppers, Annoy Neighbors, Scare Dogs. The Wall Street Journal, 26 December 2018. [Google Scholar]
- Torija, A.J.; Li, Z.; Self, R.H. Effects of a hovering unmanned aerial vehicle on urban soundscapes perception. Transp. Res. Part Transp. Environ. 2020, 78, 102195. [Google Scholar] [CrossRef]
- Morrell, S.; Taylor, R.; Lyle, D. A review of health effects of aircraft noise. Aust. N. Z. J. Public Health 1997, 21, 221–236. [Google Scholar] [CrossRef]
- Kapustina, L.; Izakova, N.; Makovkina, E.; Khmelkov, M. The global drone market: Main development trends. In Proceedings of the SHS Web of Conferences, EDP Sciences, Muscat, Oman, 15–16 November 2021; Volume 129, p. 11004. [Google Scholar]
- Schäffer, B.; Pieren, R.; Heutschi, K.; Wunderli, J.M.; Becker, S. Drone Noise Emission Characteristics and Noise Effects on Humans—A Systematic Review. Int. J. Environ. Res. Public Health 2021, 18, 5940. [Google Scholar] [CrossRef]
- FAA. FAA Aerospace Forecast, Fiscal Years 2019–2039; Technical Report; FAA: Washington, DC, USA, 2022.
- Mulero-Pázmány, M.; Jenni-Eiermann, S.; Strebel, N.; Sattler, T.; Negro, J.; Tablado, Z. Unmanned aircraft systems as a new source of disturbance for wildlife: A systematic review. PLoS ONE 2017, 12, e0178448. [Google Scholar] [CrossRef] [PubMed]
- Ditmer, M.; Vincent, J.; Werden, L.; Tanner, J.; Laske, T.; Iaizzo, P.; Garshelis, D.; Fieberg, J. Bears Show a Physiological but Limited Behavioral Response to Unmanned Aerial Vehicles. Curr. Biol. 2015, 25, 2278–2283. [Google Scholar] [CrossRef] [PubMed]
- Christiansen, F.; Rojano-Doñate, L.; Madsen, P.; Bejder, L. Noise Levels of Multi-Rotor Unmanned Aerial Vehicles with Implications for Potential Underwater Impacts on Marine Mammals. Front. Mar. Sci. 2016, 3, 277. [Google Scholar] [CrossRef]
- Smith, C.; Sykora-bodie, S.; Bloodworth, B.; Pack, S.; Spradlin, T.; Leboeuf, N. Assessment of known impacts of unmanned aerial systems (UAS) on marine mammals: Data gaps and recommendations for researchers in the United States. J. Unmanned Veh. Syst. 2016, 14, 31–44. [Google Scholar] [CrossRef]
- Christian, A.; Cabell, R. Initial investigation into the psychoacoustic properties of small unmanned aerial system noise. In Proceedings of the 23rd AIAA/CEAS Aeroacoustics Conference, Denver, CO, USA, 5–9 June 2017; p. 4051. [Google Scholar]
- ANSI. Standardization Roadmap for Unmanned Aircraft Systems, Version 2.0., Prepared by the ANSI Unmanned Aircraft Systems Standardization Collaborative (UASSC): June 2020; Technical Report; American National Standards Institute: New York, NY, USA, 2020. [Google Scholar]
- Eißfeldt, H.; Vogelpohl, V.; Stolz, M.; Papenfuß, A.; Biella, M.; Belz, J.; Kügler, D. The acceptance of civil drones in Germany. CEAS Aeronaut. J. 2020, 11, 665–676. [Google Scholar] [CrossRef]
- ICAO. Cir 328 AN/190, Unmanned Aircraft Systems (UAS) Circular 328; Technical Report; International Civil Aviation Organization (ICAO): Montreal, QC, Canada, 2011. [Google Scholar]
- Serré, R.; Gourdain, N.; Jardin, T.; Jacob, M.C.; Moschetta, J. Towards silent micro-air vehicles: Optimization of a low Reynolds number rotor in hover. Int. J. Aeroacoustics 2019, 18, 690–710. [Google Scholar] [CrossRef]
- Serré, R.; Fournier, H.; Moschetta, J. A design methodology for quiet and long endurance MAV rotors. Int. J. Micro Air Veh. 2019, 11, 1756829319845937. [Google Scholar] [CrossRef]
- Pagliaroli, T.; Candeloro, P.; Camussi, R.; Giannini, O.; Panciroli, R.; Bella, G. Aeroacoustic Study of small scale Rotors for mini Drone Propulsion: Serrated Trailing Edge Effect. In Proceedings of the 2018 AIAA/CEAS Aeroacoustics Conference 2018, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Candeloro, P.; Nargi, R.; Patanè, F.; Pagliaroli, T. Experimental Analysis of Small-Scale Rotors with Serrated Trailing Edge for Quiet Drone Propulsion Experimental Analysis of Small-Scale Rotors with Serrated Trailing Edge for Quiet Drone Propulsion. J. Phys. 2020, 1589, 012007. [Google Scholar] [CrossRef]
- Candeloro, P.; Nargi, R.E.; Grande, E.; Ragni, D.; Pagliaroli, T. Experimental Fluid Dynamic Characterization of Serrated Rotors for Drone Propulsion. J. Phys. Conf. Ser. 2021, 1977, 012007. [Google Scholar] [CrossRef]
- Deters, R.; Ananda Krishnan, G.; Selig, M. Reynolds number effects on the performance of small-scale propellers. In Proceedings of the 32nd AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 16–20 June 2014; p. 2151. [Google Scholar]
- Deters, R.; Kleinke, S.; Selig, M. Static testing of propulsion elements for small multirotor unmanned aerial vehicles. In Proceedings of the 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–9 June 2017; p. 3743. [Google Scholar]
- Deters, R.; Dantsker, O.; Kleinke, S.; Norman, N.; Selig, M. Static performance results of propellers used on nano, micro, and mini quadrotors. In Proceedings of the 2018 Applied Aerodynamics Conference, Atlanta, GA, USA, 25–29 June 2018; p. 4122. [Google Scholar]
- Merchant, M.; Miller, L.S. Propeller performance measurement for low Reynolds number UAV applications. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006; p. 1127. [Google Scholar]
- Brandt, J.; Selig, M. Propeller performance data at low reynolds numbers. In Proceedings of the 49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011; p. 1255. [Google Scholar]
- McCrink, M.; Gregory, J. Blade element momentum modeling of low-reynolds electric propulsion systems. J. Aircr. 2017, 54, 163–176. [Google Scholar] [CrossRef]
- Gur, O.; Rosen, A. Optimizing Electric Propulsion Systems for Unmanned Aerial Vehicles. J. Aircr. 2009, 46, 1340–1353. [Google Scholar] [CrossRef]
- Huff, D.; Henderson, B. Electric motor noise for small quadcopters: Part 1–Acoustic Measurements. In Proceedings of the 2018 AIAA/CEAS Aeroacoustics Conference, Atlanta, GA, USA, 25–29 June 2018; p. 2952. [Google Scholar]
- Pagliaroli, T.; Moschetta, J.; Benard, E.; Nana, C. Noise signature of a MAV rotor in hover. In Proceedings of the 49th International Symposium of Applied Aerodynamics, Lille, France, 24–26 March 2014; pp. 24–25. [Google Scholar]
- Sinibaldi, G.; Marino, L. Experimental analysis on the noise of propellers for small UAV. Appl. Acoust. 2013, 74, 79–88. [Google Scholar] [CrossRef]
- Gur, O.; Rosen, A. Design of a Quiet Propeller for an Electric Mini. J. Propuls. Power 2009, 25, 717–728. [Google Scholar] [CrossRef]
- JanakiRam, D.; Scruggs, B. Investigation of performance, noise and detectability characteristics of small-scale remotely piloted vehicle /RPV/ propellers. In Proceedings of the 7th Aeroacoustics Conference, Palo Alto, CA, USA, 15–20 November 1981; Volume 19, pp. 1052–1060. [Google Scholar] [CrossRef]
- Serre, R.; Chapin, V.; Moschetta, J.; Fournier, H. Reducing the noise of Micro–Air Vehicles in hover. In Proceedings of the International Micro Air Vehicle Conference and Flight Competition, Toulouse, France, 18–21 September 2017; pp. 51–59. [Google Scholar]
- Leslie, A.; Wong, K.; Auld, D. Broadband Noise Reduction on a mini-UAV Propeller. In Proceedings of the 14th AIAA/CEAS Aeroacoustics Conference (29th AIAA Aeroacoustics Conference), Vancouver, BC, Canada, 5–7 May 2008. [Google Scholar] [CrossRef]
- Nelson, P.; Morfey, C. Aerodynamic Sound Production. J. Sound Vib. 1981, 79, 263–289. [Google Scholar] [CrossRef]
- Rozenberg, Y.; Roger, M.; Moreau, S. Rotating Blade Trailing-Edge Noise: Experimental Validation of Analytical Model. AIAA J. 2010, 48, 951–962. [Google Scholar] [CrossRef]
- Massey, K.; Gaeta, R. Noise measurements of tactical UAVs. In Proceedings of the 16th AIAA/CEAS Aeroacoustics Conference, Stockholm, Sweden, 7–9 June 2010; p. 3911. [Google Scholar]
- Zawodny, N.; Jr, D.B.; Burley, C. Acoustic Characterization and Prediction of Representative, Small-Scale Rotary-Wing Unmanned Aircraft System Components. In Proceedings of the 72nd American Helicopter Society (AHS) Annual Forum, West Palm Beach, FL, USA, 17–19 May 2016. [Google Scholar]
- Cabell, R.; Grosveld, F.; McSwain, R. Measured noise from small unmanned aerial vehicles. In Proceedings of the Inter-Noise and Noise-Con Congress and Conference Proceedings, Hamburg, Germany, 21–24 August 2016; Volume 252, pp. 345–354. [Google Scholar]
- Fattah, R.; Chen, W.; Wu, H.; Wu, Y.; Zhang, X. Noise measurements of generic small-scale propellers. In Proceedings of the 25th AIAA/CEAS Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019; p. 2498. [Google Scholar]
- Brooks, T.; Jolly, J.R., Jr.; Marcolini, M. Helicopter Main-Rotor Noise: Determination of Source Contributions Using Scaled Model Data; Technical Report; NASA: Washington, DC, USA, 1988.
- Zawodny, N.; Boyd, D., Jr. Investigation of rotor-airframe interaction noise associated with small-scale rotary-wing unmanned aircraft systems. J. Am. Helicopter Soc. 2017, 65, 1–17. [Google Scholar] [CrossRef]
- Farassat, F.; Succi, G. A review of propeller discrete frequency noise prediction technology with emphasis on two current methods for time domain calculations. Top. Catal. 1980, 71, 399–419. [Google Scholar] [CrossRef]
- Intravartolo, N.; Sorrells, T.; Ashkharian, N.; Kim, R. Attenuation of Vortex Noise Generated by UAV Propellers at Low Reynolds Numbers. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar] [CrossRef]
- Williams, J.E.F.; Hawkings, D.L. Sound Generation by Turbulence and Surfaces in Arbritary Motion. Philos Trans. Royal Soc. A 1969, 264, 321–342. [Google Scholar] [CrossRef]
- Succi, G. Design of Quiet Efficient Propellers; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1979; p. 14. [Google Scholar] [CrossRef]
- Schlinker, R.; Amiet, R. Helicopter Rotor Trailing Edge Noise. In Proceedings of the 7th Aeroacoustics Conference, Palo Alto, CA, USA, 5–7 October 1981; p. 2001. [Google Scholar] [CrossRef]
- Rozenberg, Y.; Roger, M.; Moreau, S. Fan Blade Trailing-Edge Noise Prediction Using RANS Simulations. J. Acoust. Soc. Am. 2008, 123, 5207–5212. [Google Scholar] [CrossRef]
- Corcos, G. The structure of the turbulent pressure field in boundary-layer flows. J. Fluid Mech. 1964, 18, 353–378. [Google Scholar] [CrossRef]
- Pang, E.; Cambray, A.; Rezgui, D.; Azarpeyvand, M.; Showkat-Ali, S. Investigation Towards a Better Understanding of Noise Generation from UAV Propellers. In Proceedings of the 2018 AIAA/CEAS Aeroacoustics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Miljković, D. Methods for attenuation of unmanned aerial vehicle noise. In Proceedings of the 2018 41st International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 21–25 May 2018; pp. 0914–0919. [Google Scholar]
- Betz, A. Schraubenpropeller mit geringstem Energieverlust. Mit einem Zusatz von l. Prandtl. Nachrichten Von Der Ges. Der Wiss. GöTtingen-Math.-Phys. Kl. 1919, 1919, 193–217. [Google Scholar]
- Patrick, H.; Finn, R.; Stich, C. Two and Three-Bladed Propeller Design For the Reduction of Radiated Noise. In Proceedings of the 3rd AIAA/CEAS Aeroacoustics Conference, Atlanta, GA, USA, 12–15 May 1997; pp. 934–950. [Google Scholar] [CrossRef]
- Roncz, J. Propeller Development for the Rutan Voyager; Technical Report; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Adkins, C.; Liebeckt, R. Design of Optimum Propellers. J. Propul. Power 1994, 10, 676–682. [Google Scholar] [CrossRef]
- Sobieszczanski-Sobieski, J.; Haftka, R. Multidisciplinary aerospace design optimization—Survey of recent developments. Struct. Optim. 1996, 14, 1–23. [Google Scholar] [CrossRef]
- Gur, O.; Rosen, A. Optimization of Propeller Based Propulsion System. J. Aircr. 2009, 46, 95–106. [Google Scholar] [CrossRef]
- Gur, O.; Rosen, A. Multidisciplinary Design Optimization of a Quiet Propeller. In Proceedings of the 14th AIAA/CEAS Aeroacoustics Conference (29th AIAA Aeroacoustics Conference), Vancouver, BC, Canada, 5–7 May 2008; Volume 3073, pp. 5–7. [Google Scholar] [CrossRef]
- Wisniewski, C.; Byerley, A.; Van Treuren, K.; Hays, A. Experimentally testing commercial and custom designed quadcopter propeller static performance and noise generation. In Proceedings of the 23rd AIAA/CEAS Aeroacoustics Conference, Denver, CO, USA, 5–9 June 2017; p. 3711. [Google Scholar]
- Cattanei, A.; Ghio, R.; Bongiovı, A. Reduction of the tonal noise annoyance of axial flow fans by means of optimal blade spacing. Appl. Acoust. 2007, 68, 1323–1345. [Google Scholar] [CrossRef]
- Clark, I.; Daly, C.; Devenport, W.; Alexander, W.; Peake, N.; Jaworski, J.; Glegg, S. Bio-inspired canopies for the reduction of roughness noise. J. Sound Vib. 2016, 385, 33–54. [Google Scholar] [CrossRef]
- Peake, N. The aeroacoustics of the Owl. In Fluid-Structure-Sound Interactions and Control; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Jaworski, J.; Peake, N. Aerodynamic noise from a poroelastic edge with implications for the silent flight of owls. J. Fluid Mech. 2013, 723, 456–479. [Google Scholar] [CrossRef]
- Chong, T.; Vathylakis, A. On the aeroacoustic and flow structures developed on a flat plate with a serrated sawtooth trailing edge. J. Sound Vib. 2015, 345, 65–90. [Google Scholar] [CrossRef]
- Avallone, F.; Van Der Velden, W.; Ragni, D.; Casalino, D. Noise reduction mechanisms of sawtooth and combed-sawtooth trailing-edge serrations. J. Fluid Mech. 2018, 848, 560–591. [Google Scholar] [CrossRef]
- Howe, M.S. Noise produced by a sawtooth trailing edge. J. Acoust. Soc. Am. 1991, 90, 482–487. [Google Scholar] [CrossRef]
- Ning, Z.; Hu, H. An Experimental Study on the Aerodynamics and Aeroacoustic Characteristics of Small Propellers. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016. [Google Scholar] [CrossRef]
- Hasheminejad, S.M.; Chong, T.; Joseph, P.; Lacagnina, G. Airfoil Self-Noise Reduction Using Fractal-Serrated Trailing Edge. In Proceedings of the 2018 AIAA/CEAS Aeroacoustics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Ragni, D.; Avallone, F.; van der Velden, W.C.; Casalino, D. Measurements of near-wall pressure fluctuations for trailing-edge serrations and slits. Exp. Fluids 2019, 60, 6. [Google Scholar] [CrossRef]
- Arce León, C.; Merino-Martínez, R.; Ragni, D.; Avallone, F.; Snellen, M. Boundary layer characterization and acoustic measurements of flow-aligned trailing edge serrations. Exp. Fluids 2016, 57, 182. [Google Scholar] [CrossRef]
- Wei, Y.; Xu, F.; Bian, S.; Kong, D. Noise reduction of UAV using biomimetic propellers with varied morphologies leading-edge serration. J. Bionic Eng. 2020, 17, 767–779. [Google Scholar] [CrossRef]
- Chaitanya, P.; Narayanan, S.; Joseph, P.; Kim, J. Leading edge serration geometries for significantly enhanced leading edge noise reductions. In Proceedings of the 22nd AIAA/CEAS Aeroacoustics Conference, Lyon, France, 30 May–1 June 2016; pp. 1–20. [Google Scholar]
- Chaitanya, P.; Joseph, P.; Narayanan, S.; Vanderwel, C.; Turner, J.; Kim, J.W.; Ganapathisubramani, B. Performance and mechanism of sinusoidal leading edge serrations for the reduction of turbulence-aerofoil interaction noise. J. Fluid Mech. 2017, 818, 435–464. [Google Scholar] [CrossRef]
- Narayanan, S.; Chaitanya, P.; Haeri, S.; Joseph, P.; Kim, J.; Polacsek, C. Airfoil noise reductions through leading edge serrations. Phys. Fluids 2015, 27, 025109. [Google Scholar] [CrossRef]
- Lyu, B.; Azarpeyvand, M. On the noise prediction for serrated leading edges. J. Fluid Mech. 2017, 826, 205–234. [Google Scholar] [CrossRef]
- Hersh, A.; Soderman, P.; Hayden, R. Investigation of acoustic effects of leading-edge serrations on airfoils. J. Aircr. 1974, 11, 197–202. [Google Scholar] [CrossRef]
- Leslie, A.; Wong, C.; Auld, D. Experimental analysis of the radiated noise from a small propeller. In Proceedings of the 20th International Congress on Acoustics, ICA, Sydney, NSW, Australia, 23–27 August 2010. [Google Scholar]
- McAlpine, A.; Nash, E.; Lowson, M. On the generation of discrete frequency tones by the flow around an aerofoil. J. Sound Vib. 1999, 222, 753–779. [Google Scholar] [CrossRef]
- Graham, L. The Silent FLight of Owl. Aeronaut J 1934, 38, 837–843. [Google Scholar] [CrossRef]
- Lee, S. Reduction of Blade-Vortex Interaction Noise Through Porous Leading Edge. AIAA J. 1994, 32, 480–488. [Google Scholar] [CrossRef]
- Revell, J. Trailing-Edge Flap Noise Reduction by Porous Acoustic Treatment. In Proceedings of the 3rd AIAA/CEAS Aeroacoustic Conference, Atlanta, GA, USA, 12–14 May 1997; pp. 493–505. [Google Scholar] [CrossRef]
- Sueki, T.; Takaishi, T.; Ikeda, M.; Arai, N. Application of porous material to reduce aerodynamic sound from bluff bodies. Fluid Dyn. Res. 2010, 42, 015004. [Google Scholar] [CrossRef]
- Geyer, T.; Sarradj, E.; Fritzsche, C. Porous airfoils: Noise reduction and boundary layer effects. Int. J. Aeroacoust. 2010, 9, 787–820. [Google Scholar] [CrossRef]
- Sarradj, E.; Geyer, T. Noise Generation by Porous Airfoils. In Proceedings of the 13th AIAA/CEAS Aeroacoustics Conference (28th Aeroacoustic Conference), Rome, Italy, 21–23 May 2007. [Google Scholar] [CrossRef]
- Jiang, C.; Moreau, D.; Yauwenas, Y.; Fischer, J.; Doolan, C.; Gao, J.; Jiang, W.; McKay, R.; Kingan, M. Control of rotor trailing edge noise using porous additively manufactured blades. In Proceedings of the 2018 AIAA/CEAS Aeroacoustics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Moreau, S.; Dignou, B.; Jaiswal, P.; Yakhina, G.; Pasco, Y.; Sanjose, M.; Alstrom, B.; Atalla, N. Trailing-edge noise of a flat plate with several liner-type porous appendices. In Proceedings of the 2018 AIAA/CEAS Aeroacoustics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Rubio Carpio, A.; Merino Martínez, R.; Avallone, F.; Ragni, D.; Snellen, M.; van der Zwaag, S. Experimental characterization of the turbulent boundary layer over a porous trailing edge for noise abatement. J. Sound Vib. 2019, 443, 537–558. [Google Scholar] [CrossRef]
- Ali, S.S.; Azarpeyvand, M.; da Silva, C.I. Experimental Study of Porous Treatments for Aerodynamic and Aeroacoustic Purposes. In Proceedings of the 23rd AIAA/CEAS Aeroacoustics Conference, Denver, CO, USA, 5–9 June 2017; p. 3358. [Google Scholar] [CrossRef]
- Herr, M.; Rossignol, K.; Delfs, J.; Lippitz, N.; Mößner, M. Specification of Porous Materials for Low-Noise. In Proceedings of the 24th AIAA/CEAS Aeroacoustic Conference, Atlanta, GA, USA, 16–20 June 2014; pp. 1–19. [Google Scholar] [CrossRef]
- Joseph, P.F. Poro-Serrated Trailing-Edge Devices for Airfoil Self-Noise. AIAA J. 2015, 53, 3379–3394. [Google Scholar] [CrossRef]
- Chong, T.; Dubois, E.; Vathylakis, A. Aeroacoustic and flow assessments of the poro-serrated trailing edges. In Proceedings of the 22nd AIAA/CEAS Aeroacoustics Conference, Lyon, France, 30 May–1 June 2016. [Google Scholar] [CrossRef]
- Chong, T.; Dubois, E. Optimization of the poro-serrated trailing edges for airfoil broadband noise reduction. J. Acoust. Soc. Am. 2016, 140, 1361–1373. [Google Scholar] [CrossRef] [PubMed]
- Ghaffarivardavagh, R.; Nikolajczyk, J.; Anderson, S.; Zhang, X. Ultra-open acoustic metamaterial silencer based on Fano-like interference. Phys. Rev. B Condens. Matter 2019, 99, 024302. [Google Scholar] [CrossRef]
- Újsághy, O.; Kroha, J.; Szunyogh, L.; Zawadowski, A. Theory of the Fano resonance in the STM tunneling density of states due to a single Kondo impurity. Phys. Rev. Lett. 2000, 85, 2557. [Google Scholar] [CrossRef]
- Ning, Z.; Hu, H. An Experimental Study on the Aerodynamic and Aeroacoustic Performances of a Bio-Inspired UAV Propeller. In Proceedings of the 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- Bodling, A.; Agrawal, B.; Sharma, A.; Clark, I.; Alexander, W.; Devenport, W. Numerical Investigations of Bio-Inspired Blade Designs to Reduce Broadband Noise in Aircraft Engines and Wind Turbines. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017; p. 0458. [Google Scholar] [CrossRef]
- Noda, R.; Nakata, T.; Ikeda, T.; Chen, D.; Yoshinaga, Y.; Ishibashi, K.; Rao, C.; Liu, H. Development of bio-inspired low-noise propeller for a drone. J. Robot. Mechatron. 2018, 30, 337–343. [Google Scholar] [CrossRef]
- Huang, X.; Sheng, L.; Wang, Y. Propeller synchrophase angle optimization of turboprop-driven aircraft—An experimental investigation. J. Eng. Gas Turbines Power 2014, 136, 112606. [Google Scholar] [CrossRef]
- Jones, J.; Fuller, C. An Experimental Investigation of the Interior Noise Control Effects of Propeller Synchrophasing; Technical Report; NASA: Washington, DC, USA, 1986.
- Jones, J.D.; Fuller, C. Noise control characteristics of synchrophasing. II-Experimental investigation. AIAA J. 1986, 24, 1271–1276. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Candeloro, P.; Ragni, D.; Pagliaroli, T. Small-Scale Rotor Aeroacoustics for Drone Propulsion: A Review of Noise Sources and Control Strategies. Fluids 2022, 7, 279. https://doi.org/10.3390/fluids7080279
Candeloro P, Ragni D, Pagliaroli T. Small-Scale Rotor Aeroacoustics for Drone Propulsion: A Review of Noise Sources and Control Strategies. Fluids. 2022; 7(8):279. https://doi.org/10.3390/fluids7080279
Chicago/Turabian StyleCandeloro, Paolo, Daniele Ragni, and Tiziano Pagliaroli. 2022. "Small-Scale Rotor Aeroacoustics for Drone Propulsion: A Review of Noise Sources and Control Strategies" Fluids 7, no. 8: 279. https://doi.org/10.3390/fluids7080279
APA StyleCandeloro, P., Ragni, D., & Pagliaroli, T. (2022). Small-Scale Rotor Aeroacoustics for Drone Propulsion: A Review of Noise Sources and Control Strategies. Fluids, 7(8), 279. https://doi.org/10.3390/fluids7080279