M219 Acoustic Cavity
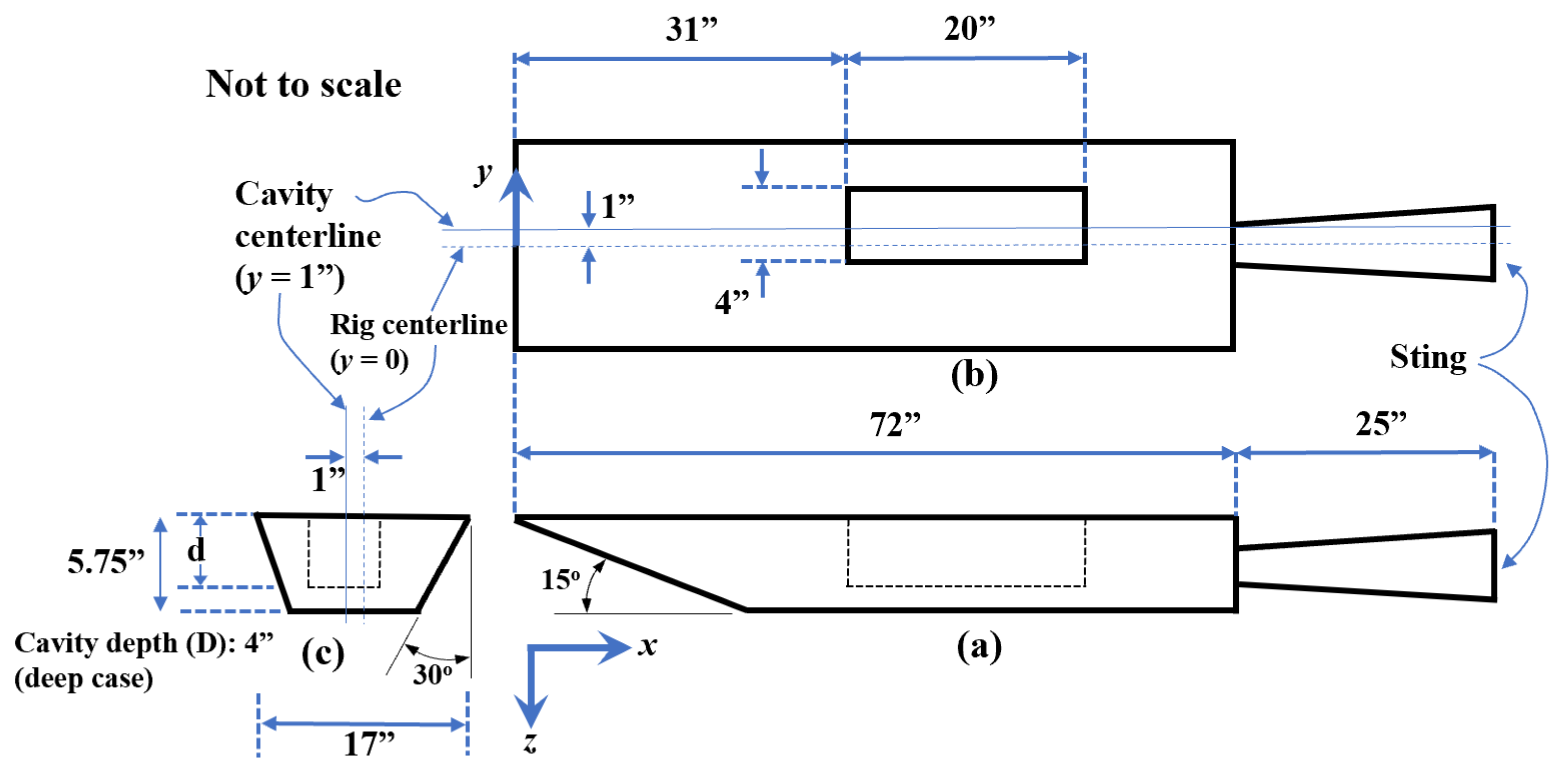
Numerical simulations of flow over a fully 3D subsonic/supersonic rectangular cavity are presented and discussed in this section. The vortex system and flow patterns inside a rectangular three-dimensional acoustic cavity consist of intricate fluid dynamics structures, highly dictated by the incoming flow regime and geometry dimensions. For the purpose of testing the Menter SST-SAS turbulence model, the cavity configuration is selected as the M219 experimental test case of Henshaw [
15] for a deep cavity (4 inches) at two different free-stream Mach numbers (
= 0.85 and 1.35). An adapted schematic of the experimental model used in [
15] is shown in
Figure 1. In [
15], ceiling static pressure was measured at the rig centerline (
) for the deep cavity and off-centerline (i.e., at the cavity centerline,
) for the shallow cavity via Kulite transducers. Note that the cavity centerline is displaced by
with respect to the rig centerline. In the present study, only the measured root mean square (RMS) value of the ceiling static pressure at the rig centerline (
y = 0) was employed for numerical validation of the deep cavity (K20 to K29 transducers).
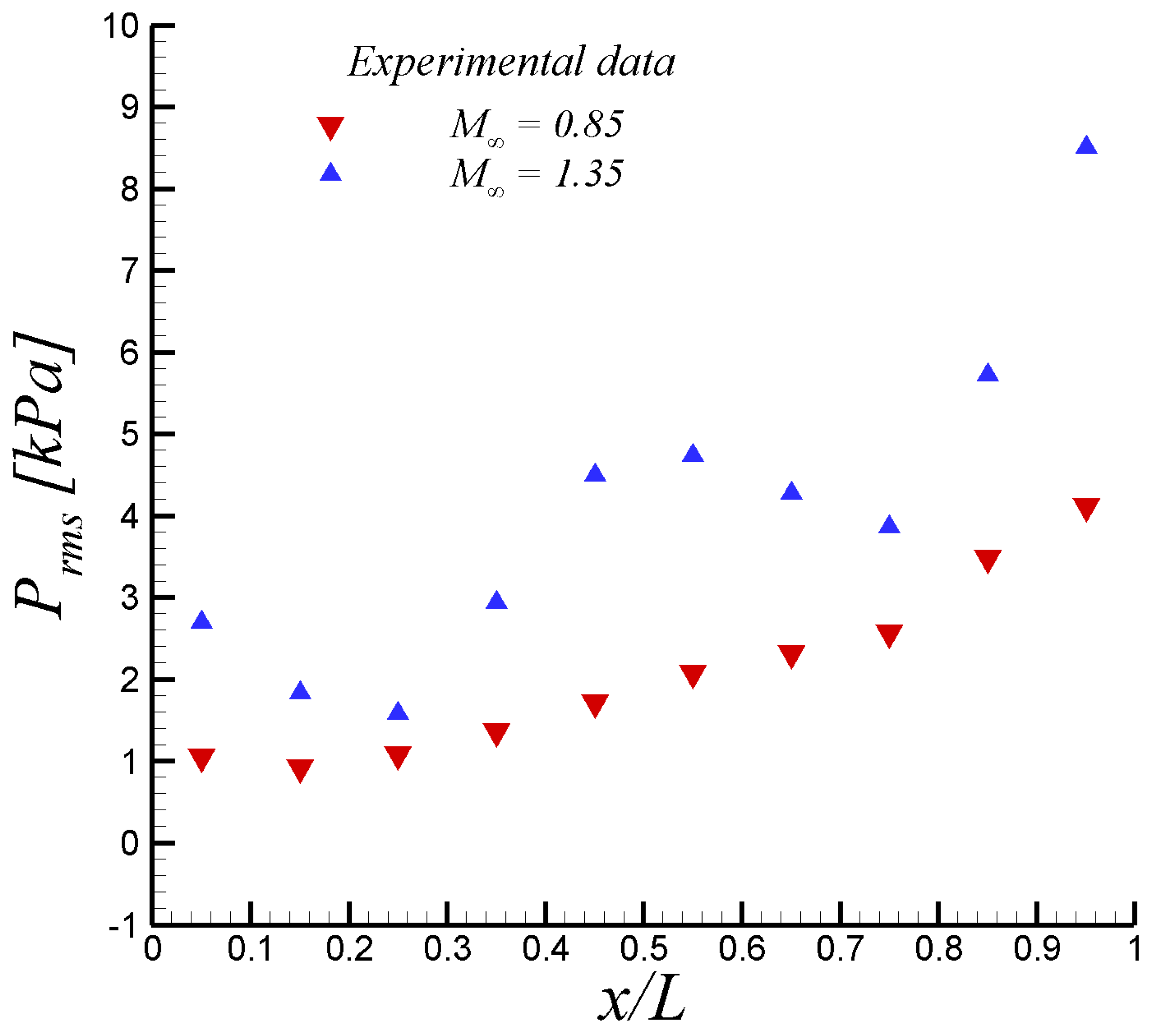
Figure 2 depicts the RMS static pressure distribution over the ceiling of the deep empty cavity. It is observed that incoming high-subsonic-Mach-number flow induces a slightly increasing RMS distribution, with a growing factor of approximately four between the last (K29) and first (K20) Kulite transducers. However, the RMS distribution at Mach 1.35 exhibits a wavy trend, with local minima at
0.25 and 0.75, respectively.
The geometry dimensions of the M219 cavity in terms of the depth are
(length, width, and depth), with a depth,
D, of 4 inches. Since the width and depth of the cavity are the same, this configuration create a fully three-dimensional flow pattern. The Reynolds number spans 9.5 ×
to 21 ×
, based on the cavity depth. The incoming flat-plate boundary layer is turbulent, with the ratio of the upstream boundary layer thickness to the cavity depth, i.e.,
, approximately ranging from 0.1 to 0.25 for Mach numbers of 0.85 and 1.35, respectively. The unstructured hybrid mesh (hereafter fine mesh) is composed of approximately 3.37 million tetrahedral elements, 4472 prisms, and 459 pyramids. This element distribution was determined to be deemed appropriate for the goals of this study and cavity representation based on the initial grid-independent study performed. An initial coarse hybrid mesh was designed and created according to our past experience with steady RANS [
2], having approximately 30 to 40% fewer elements than the fine mesh. It is important to mention that when dealing with unsteady simulations or LES-like approaches (scale-resolving simulations) such as the SST-SAS model, it is clear that the outcomes are determined by the numerical approach and grid point distribution utilized. However, performing successive “grid refinements” to achieve absolute grid-independent results would lead to DNS outcomes, which is not consistent with the purpose of assessing turbulence model resilience.
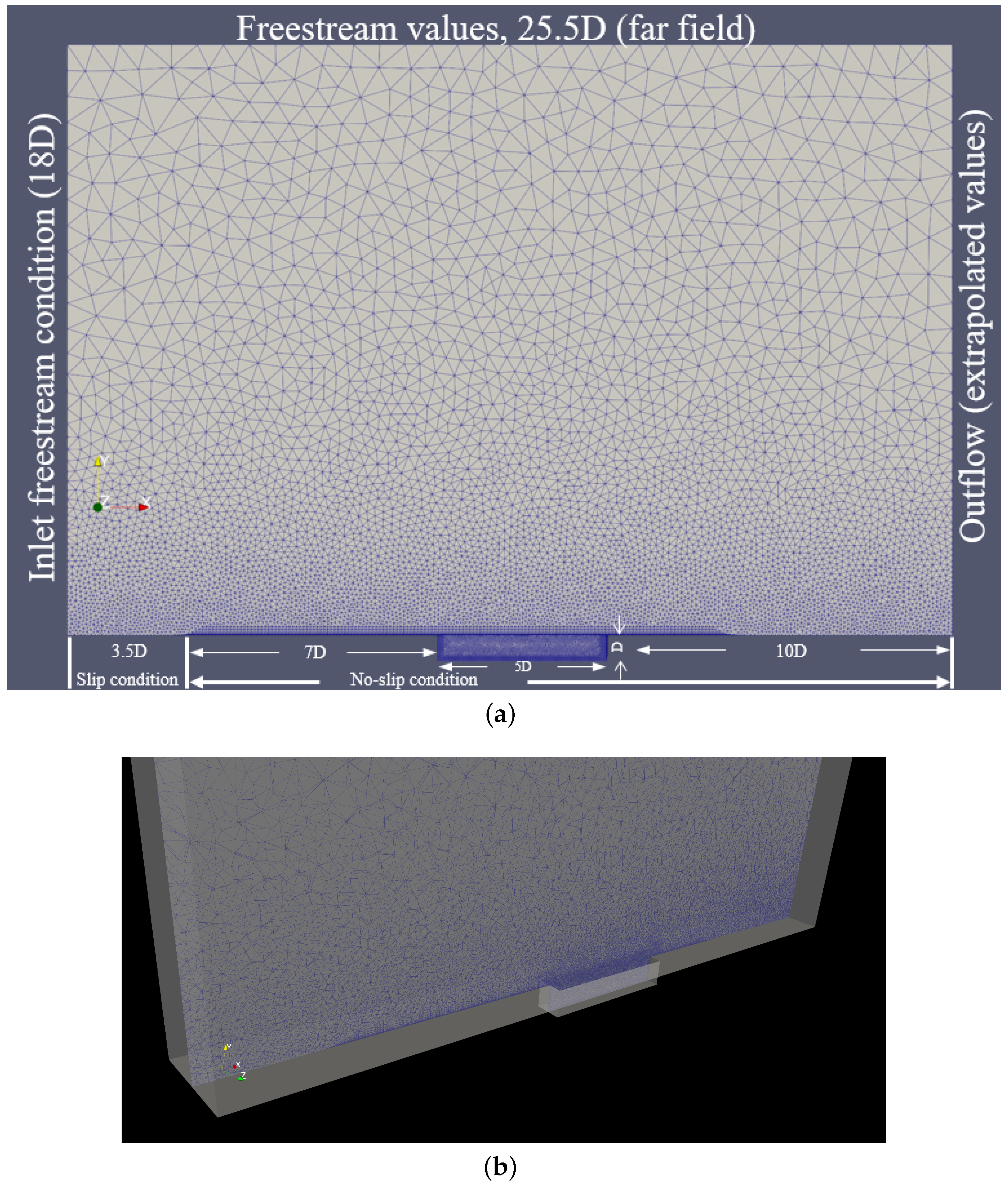
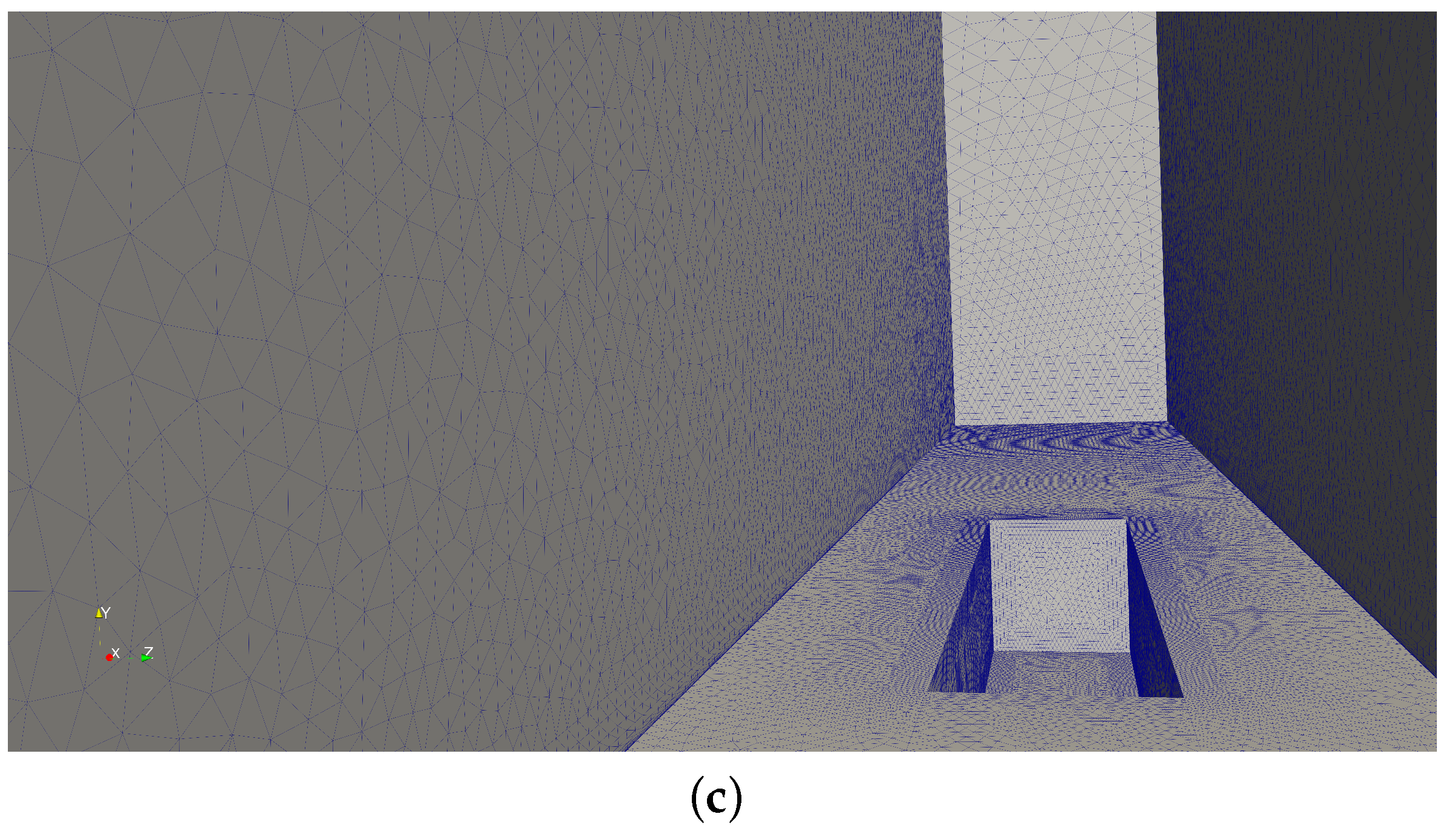
Some views of the computational domain, boundary conditions, and grid system are displayed in
Figure 3. A right-side view (flow from left to right) is shown in
Figure 3a with the corresponding dimensions in terms of the cavity depth and boundary conditions, which are further described later in the paper. Note that the coordinates
y and
z represent the vertical and spanwise directions, respectively, in the present study, whereas the opposite was assumed in [
15]. Also, note that the origin coordinate system is prescribed at the cavity centerline (
) in this manuscript. An isometric view of the full computational domain and mesh schematic at the half-plane of the cavity is shown in
Figure 3b. Also, an interior cavity view is depicted in
Figure 3c. The mesh has 20 viscous layers for efficient boundary layer capturing, with the first off-wall point located at
. The layers, based on prisms to capture the viscous shear layer, are stretched in the wall-normal direction but with the same heights in the streamwise direction of the no-slip surfaces around and inside the cavity. This ensures that the first off-wall point locations are within 0.2 to 0.4 wall or plus units inside the viscous linear layer. Furthermore, the viscous layers (structured mesh) are prescribed in no-slip condition surfaces. It was decided to cluster tetrahedral elements (unstructured mesh) inside the cavity (away from solid surfaces) and above it, based on a high-quality and high-resolution tetrahedral mesh. The total dimensions of the computational domain are as follows:
along the streamwise, vertical, and spanwise directions, respectively, and in terms of the cavity depth,
D. Therefore, the computational domain is tall enough and wide enough to eliminate any influence from the boundary faces on the flow statistics over the cavity. Moreover, the spanwise side walls are treated as symmetry (periodic) planes, the top boundary is a far-field boundary, and all bottom solid surfaces (including the cavity) are considered as adiabatic non-slip walls. Upstream of the cavity edge, a flat-plate with no-slip condition is prescribed (about 7
D in length). While a zone with slip condition (and inlet free-stream flow parameters) is set-up upstream of the flat plate (∼3.5
D in length). A zero flux condition is prescribed at the outflow plane, where flow parameters are extrapolated from within the domain (see
Figure 3a).
The selected normalized time step is
, approximately
s at
= 0.85 or
s at
= 1.35. According to Rajkumar et al. [
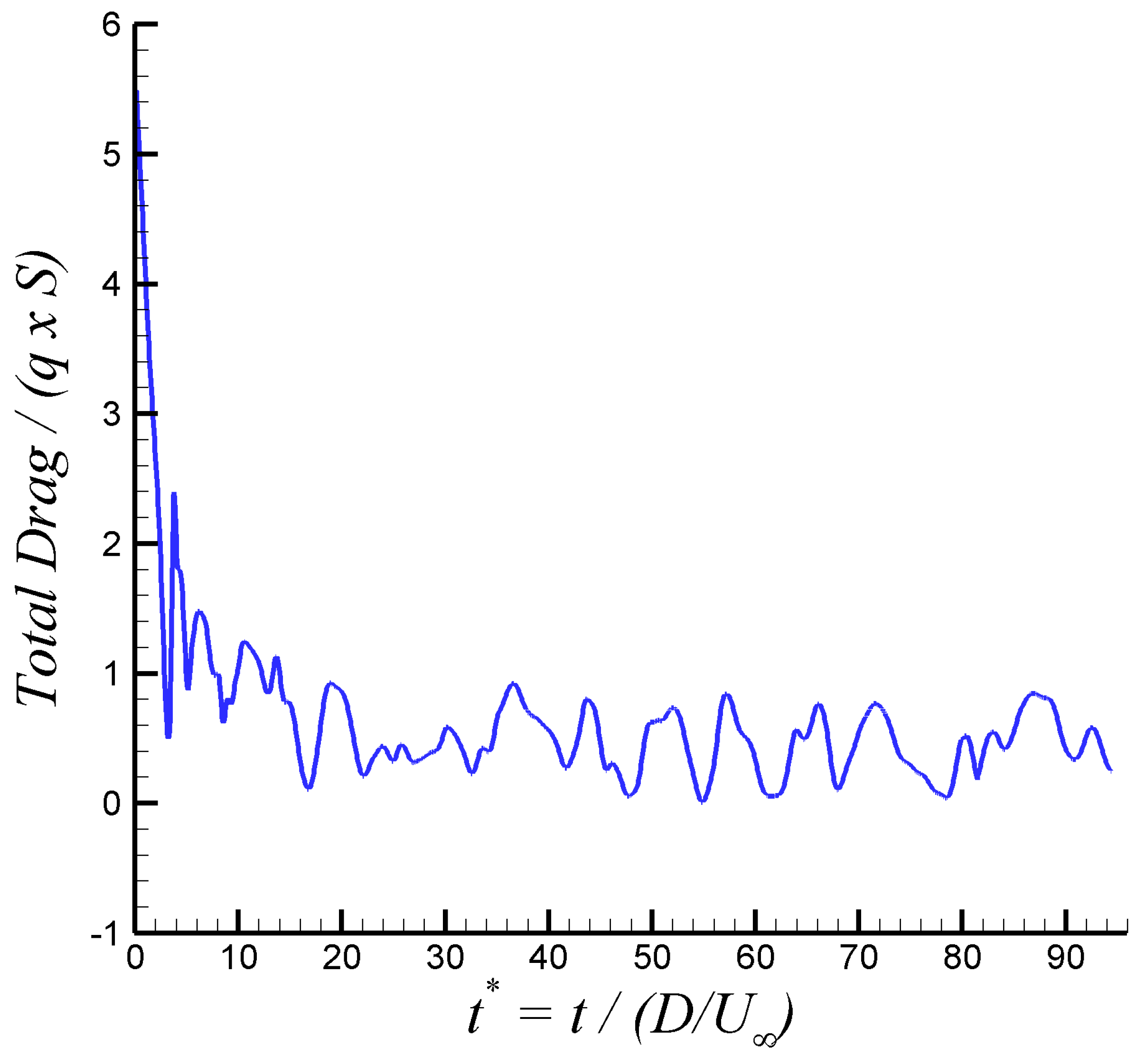
23], the SAS model enables a larger time step size than DES approaches due to its RANS nature. Their physical time steps were about 1.8 to 2.5 smaller than in the present study for a similar cavity configuration via SAS predictions. The time variation of the total drag over the cavity at
= 0.85, normalized by the reference surface and free-stream dynamic pressure, can be observed in
Figure 4. Furthermore, the transient stage took approximately 15 non-dimensional time units from the steady solution, as seen in
Figure 4. This transient part was discharged for flow statistics computation. The results were sampled, and statistics were computed after the transient stage. All flow parameters and the RMS of pressure were computed via assembled time-averaging, except in the flow visualization analysis where instantaneous flow fields were considered. The numerical data were collected during the last 81 non-dimensional time units, about 1000 flow fields were saved for post-processing analysis. According to [
15], the experimental pressure data were sampled at 6000 Hz with a block size of 1024 units. Therefore, the sampling collection for statistical analysis is deemed adequate for the objectives of this study.
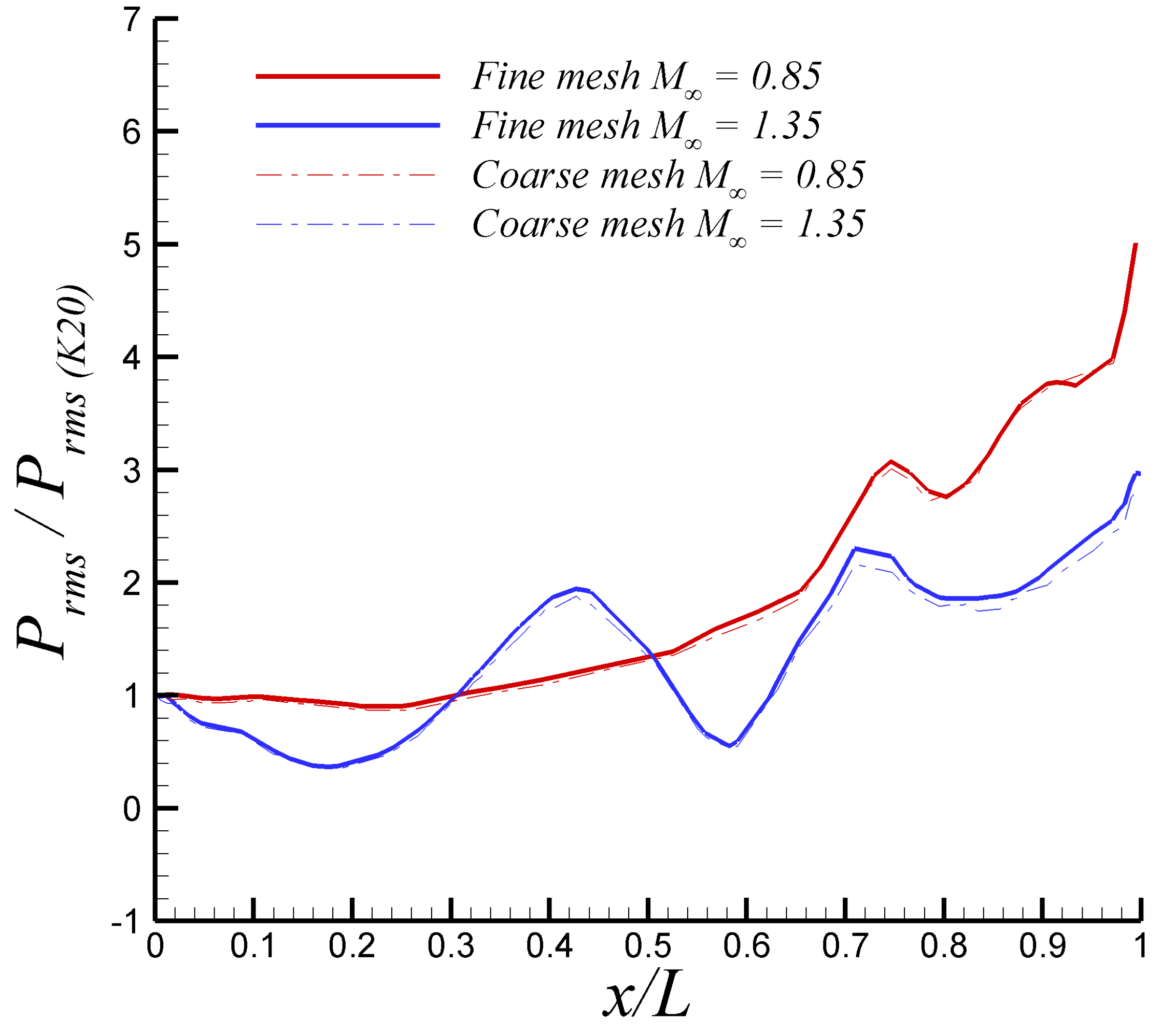
Figure 5 shows the numerical results via the SST-SAS model for the fine and coarse mesh. Overall, predictions from both meshes are very similar, with some discrepancies, particularly for the supersonic case (
= 1.35). However, those differences in numerical values between both meshes were computed as 2% at most, which demonstrates grid-independent outcomes for the fine mesh. Henceforth, numerical results from the SST-SAS model are from the fine mesh.
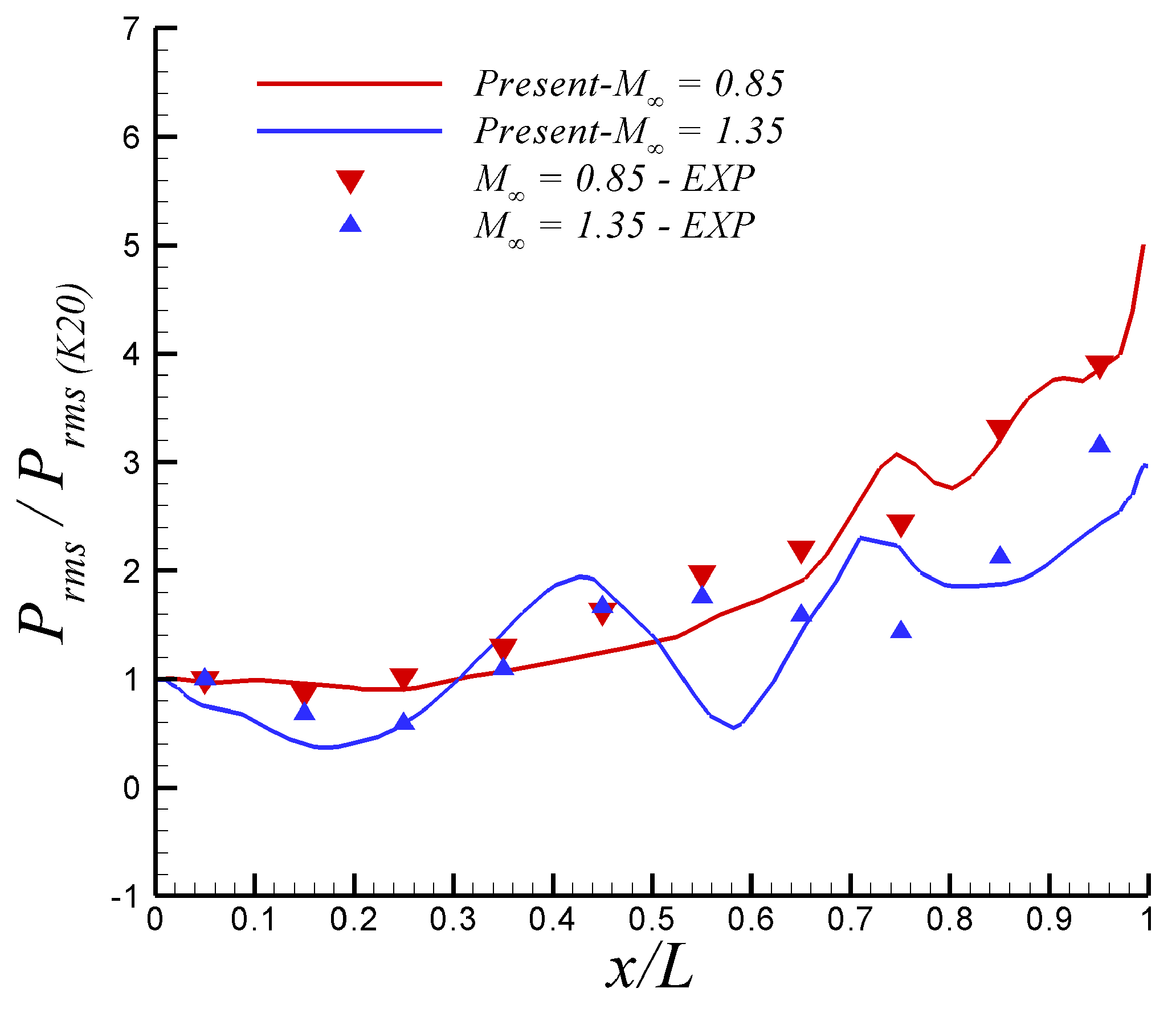
Figure 6 depicts the root mean square (RMS) of pressure fluctuations on the cavity ceiling at
= −0.25 (rig centerline) and both free-stream Mach numbers. Note that in
Figure 6 the values of
were normalized by the value at the first transducer (i.e., K20), located 1 inch downstream of the front of the cavity, in experiments by Henshaw [
15]. The comparison of the present SST-SAS results at
= 0.85 with the experimental data from [
15] is fairly good. The SAS model is able to capture the increasing slope of
by the cavity end. On the other hand, the performance of the SAS model in the supersonic regime (
= 1.35) is not as good as in the subsonic case. While the first inflexion point (around
= 0.35) is well captured, the second inflexion point in experimental
is improperly outlined by the SST-SAS model. This may be attributed to the presence of some important compressibility effect on the cavity flow, which is not taken into account in the SAS approach. The corresponding average discrepancies between the SST-SAS results and the experiments were computed to be approximately
and
units at Mach numbers of 0.85 and 1.35, respectively. According to reference [
15], the basic accuracy of the system in measuring experimental values of pressure was shown to be ±0.5%. The original SAS model was designed and mostly tested in incompressible and low-Mach-number wall-bounded flow applications [
7,
8]. Previous work on turbulent coherent structures by [
35,
36] via two-point correlations (TPCs) and the Lagrangian coherent structure (LCS) approach has revealed a moderate compressibility effect (but not negligible) on the coherent structure dimensions. Specifically, Lagares and Araya [
36] stated “coherent structures grow more isotropic proportional to the Mach number, and their inclination angle varies along the streamwise direction”. Therefore, it can be inferred that the SAS turbulence model would be greatly enhanced by the addition of a Mach number dependency of the length scale computation of the flow, which is beyond the scope of the present manuscript.
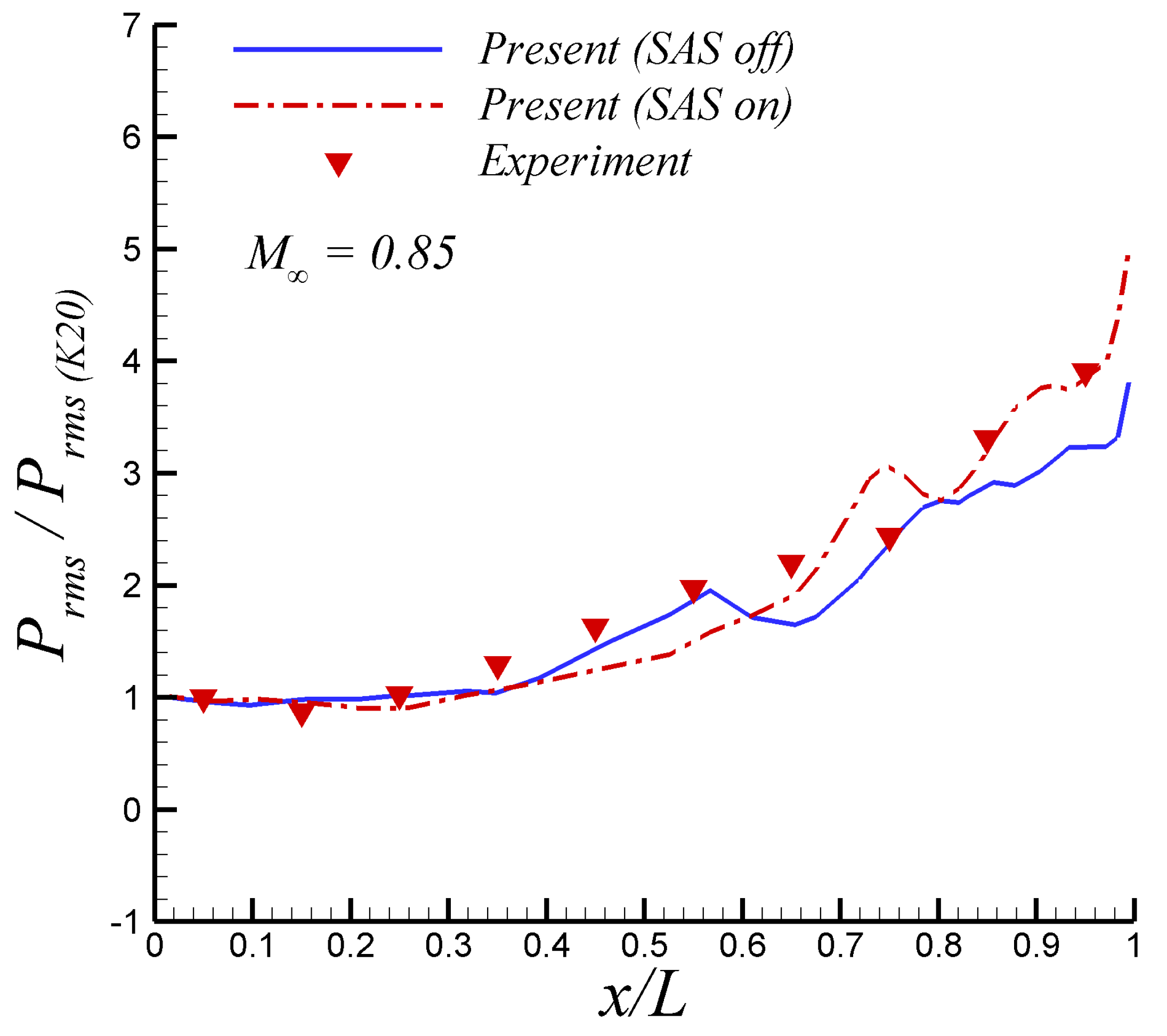
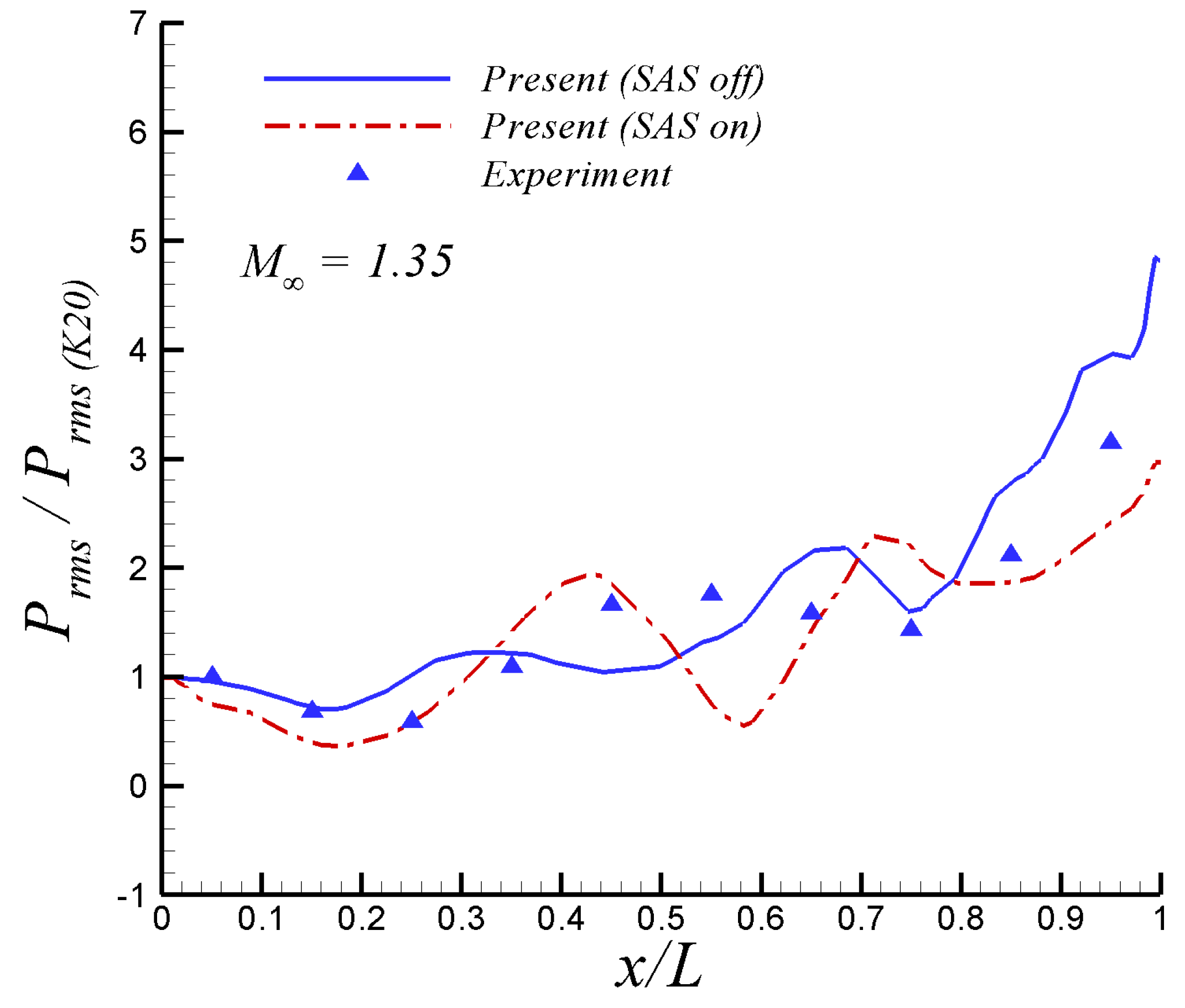
Results from the SAS model when switched on and off are shown in
Figure 7 and
Figure 8 at
= 0.85 and 1.35, respectively. The agreement of the present URANS results exhibit a moderately better agreement with the experiments from [
15] when the SAS model is active by the end of the cavity ceiling. It is hypothesized that the better performance of the SAS model at capturing experimental
in that rear cavity corner might be due to the presence of high turbulent kinetic energy,
k, and consequently large values of the turbulence length scale,
L, according to Equation (
17) (as will be visualized later on). The extra term
(see Equation (
16)) in the specific dissipation rate equation,
, is the sole adjustment to the SST model in Equation (
11) to account for the von Karman length scale,
, allowing the simulations to dynamically accommodate to resolve the large-scale motions (LSMs). Note that the term
is directly proportional to the square of the ratio
L/
. However, by taking into account zones away from the cavity rear corner, both options (off/on SAS) show similar performance.
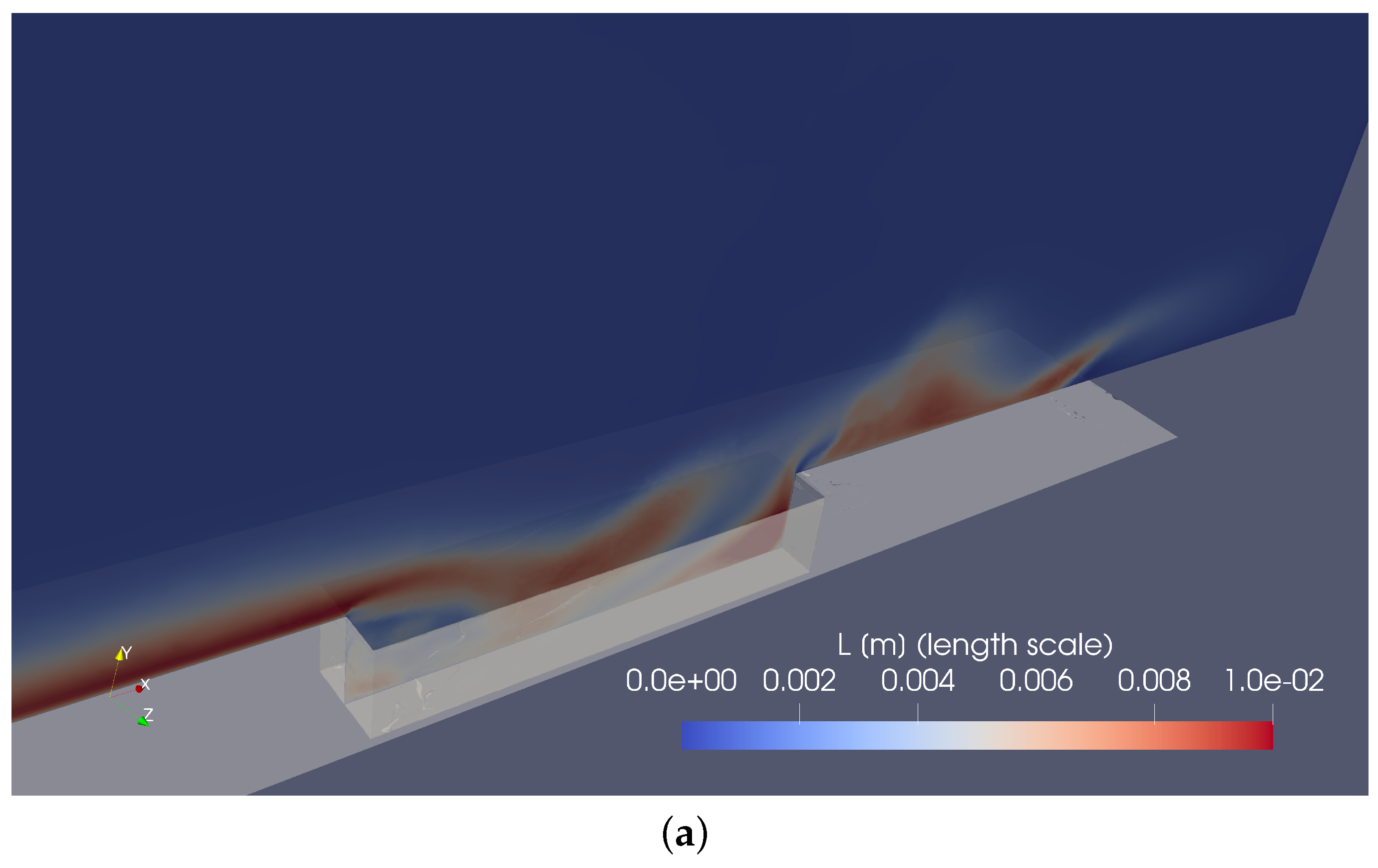
Furthermore, the corresponding iso-contours of instantaneous turbulence length scales,
L, are shown in
Figure 9a. The turbulence length scale is proportional to the square root of the turbulent kinetic energy,
k, and inversely proportional to the specific dissipation rate,
. As seen in the centerline longitudinal plane of the cavity (
Figure 9a), the maximum incoming length scale,
L, is of the order of 0.01 m or
, reaching values of
0.012 m in the back bottom corner. These local large values of
L at the rear corner cause (i) meaningful values for the
, and (ii) changes in the spatial distribution of
to better resolve LSMs, which could be the physical explanation of better capturing wall pressure fluctuations in
Figure 7. Nevertheless, a deeper analysis should be carried out to shed light on this aspect, which is outside the present manuscript’s scope. The formation of the front vortex is also clearly seen, characterized by a flow recirculation zone (with low values of momentum and turbulent kinetic energy) bounded by large values of
L (and turbulent kinetic energy, as well). A rear vortex system (highly energetic) is located at the end of the cavity at the bottom corner and characterized by significant turbulence length scale values.
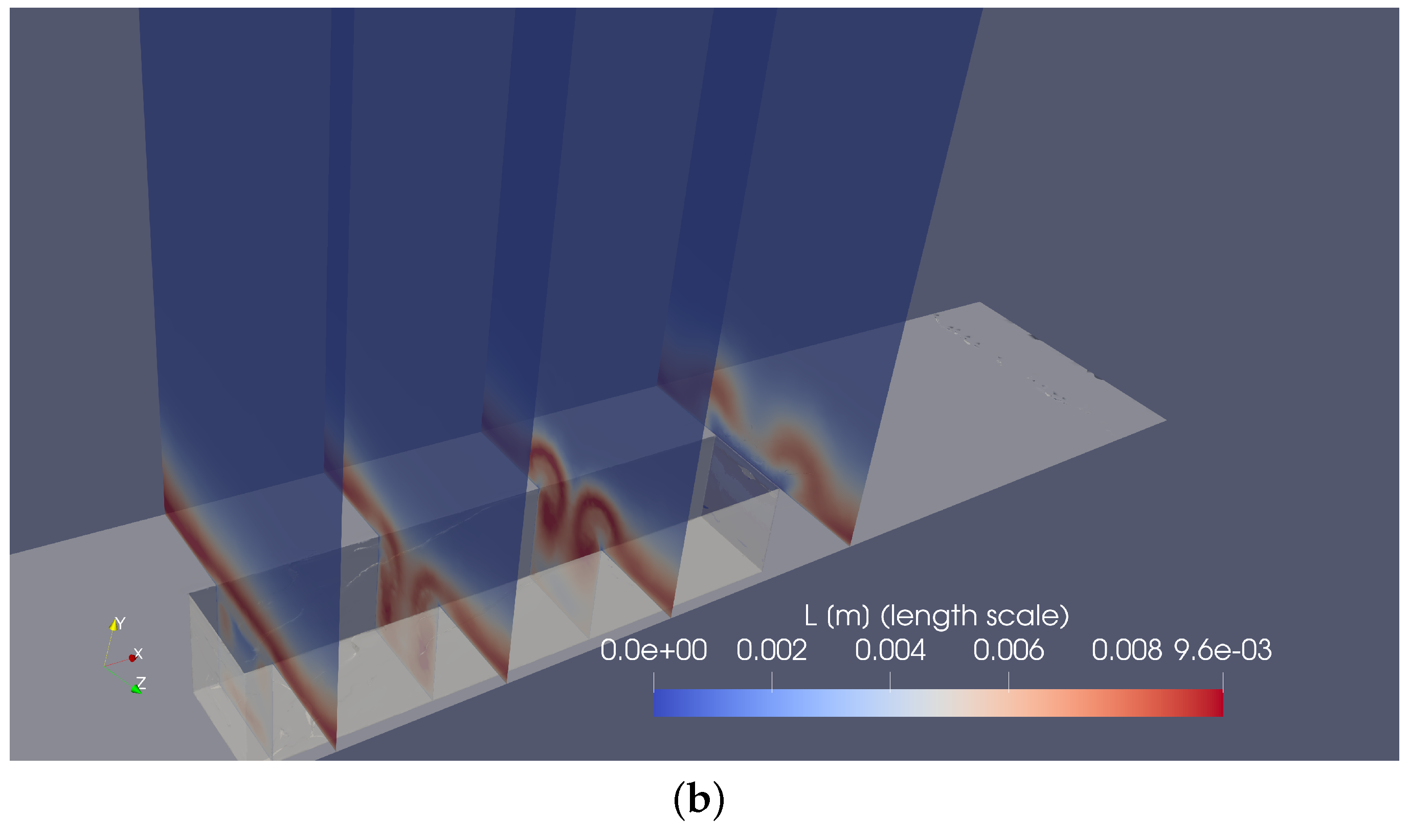
Figure 9b exhibits four cross-sectional planes separated by a distance of approximately
with iso-contours of instantaneous turbulence length scales,
L. The spatial sequence of the major horseshoe vortex formation can be observed.
In order to describe the different vortical structures observed in the cavity, we should mention the following categories, as described in [
37], open-type cavity flow and closed-type cavity flow, which are determined according to the ratio
. At subsonic flow regimes, an open-type cavity (
) is represented by a shear layer that spans the entire cavity opening, and by a large recirculation zone inside the cavity itself [
37]. On the other hand, closed-type cavities (
) are generally pictured by a shear layer generated at the front of the cavity that reattaches on the bottom of the cavity, without the presence of a large recirculation vortex in the center of the cavity. A transitional regime for rectangular cavities takes place in between. This seems to be the most appropriate category in which to class the present cavity at
. The reasons are supplied hereafter. Also, it is worth highlighting that the cavity is narrow because of
; thus, a completely three-dimensional geometry generates a different set of vortices.
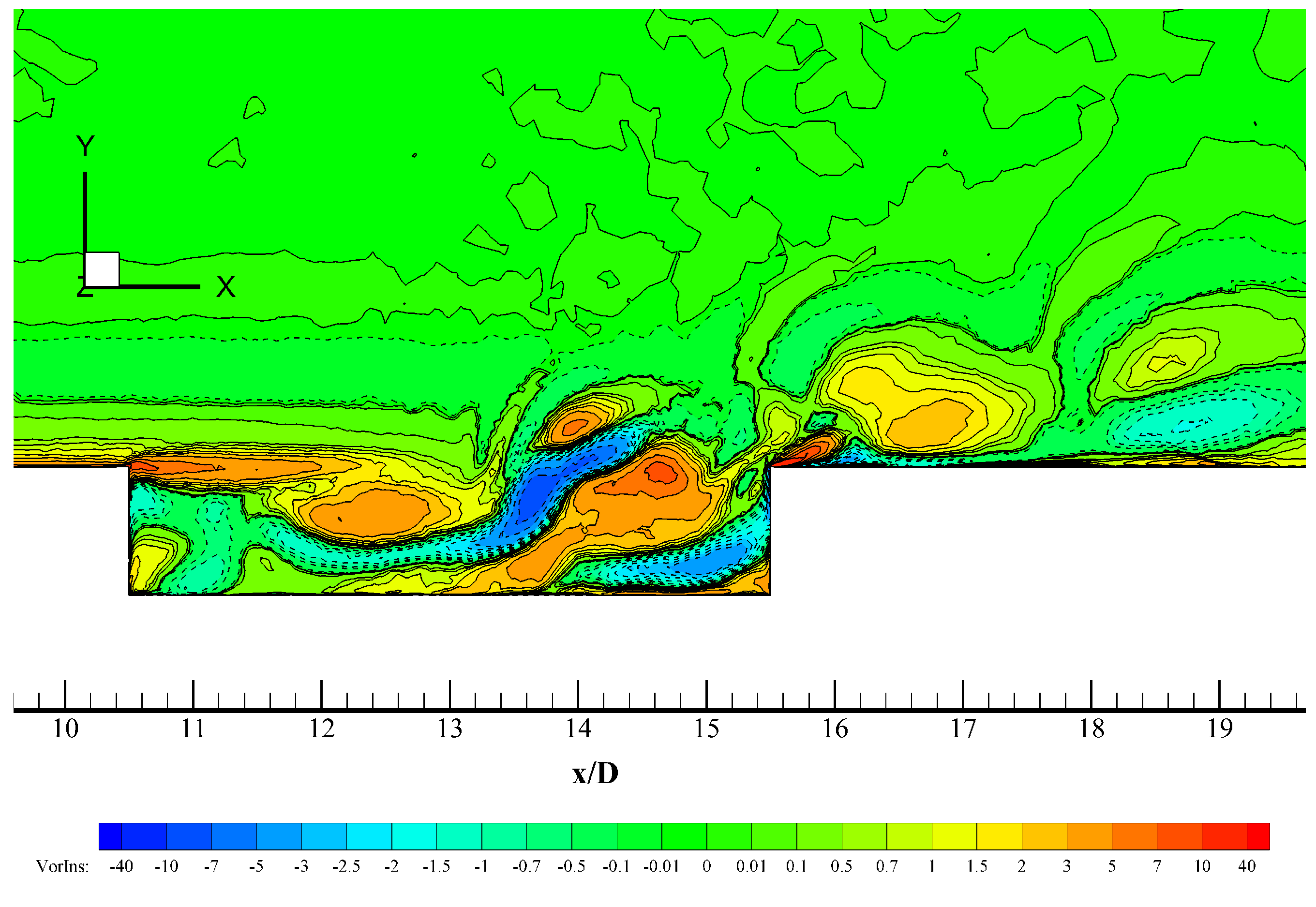
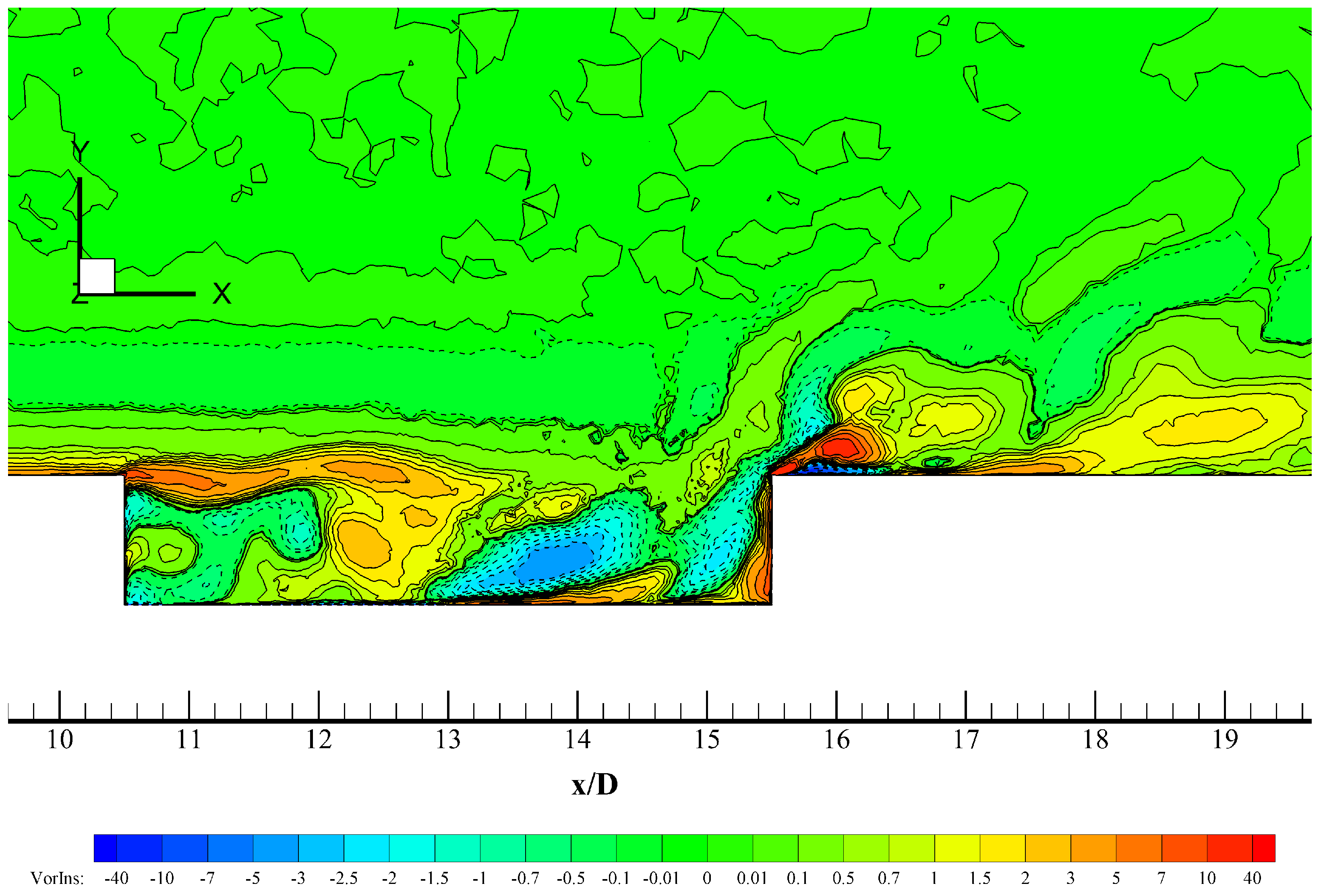
Figure 10 shows contours of instantaneous spanwise vorticity. Positive isolines (inward vorticity vector or clockwise spin) are represented by solid curves; whereas, negatives isolines (outward vorticity vector or counter-clockwise spin) are represented by dashed curves. It can be seen in
Figure 10 that the incoming turbulent boundary penetrates further into the cavity towards the ceiling. That incoming shear layer reattaches on the bottom of cavity, which is confirmed by
Figure 11 (contours of instantaneous streamwise velocity normalized by the free-stream velocity). Two small recirculation zones with clockwise spins are observed in the front side (12 <
< 13) and in the back side (14 <
< 15) of the cavity in
Figure 10. Particularly, the rear vortex transports fluid from the impinging shear layer on the cavity top downwards and towards the cavity bottom and viceversa, which is consistent with the findings of [
37]. These phenomena induce two “curved” and elongated counter-clockwise vortices (or “banana-like” vortices) that contribute to the vertical mixing of turbulence inside the cavity. In particular, the vortex duplet located at the end of the cavity in the bottom corner is mainly responsible for turbulent kinetic energy generation, which in turns induces large local values of
L, as previously explained. The
from [
38] is implemented in this study to extract and visualize vortex cores via positive values, which describe regions of the flow where rotation dominates over strain. On the other hand, negative iso-values of the
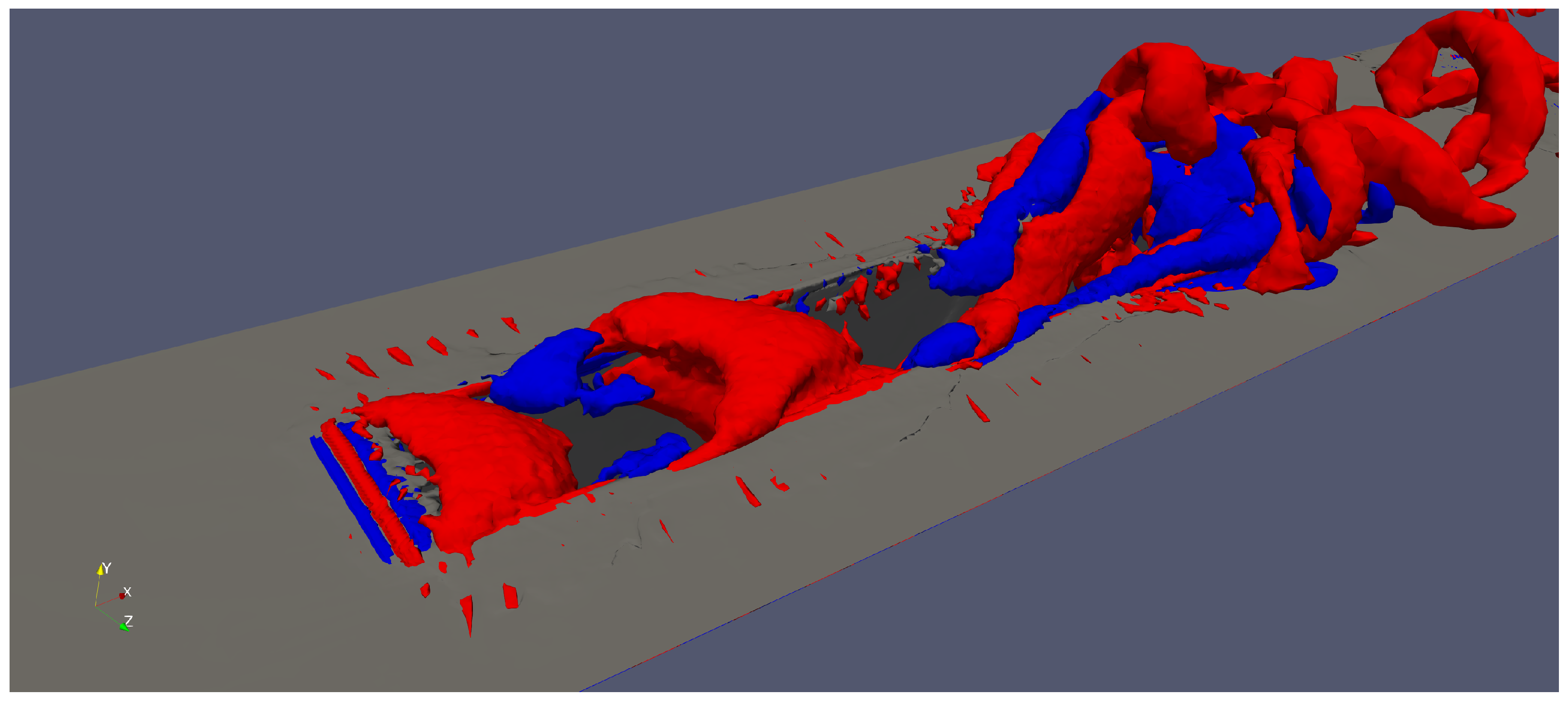
represent highly deformed flow regions. Iso-surfaces of the
(positive values in red and negative values in blue) are exhibited in
Figure 12 at
= 0.85. Focusing exclusively on the positive (red) iso-surfaces or vortex cores, the most energetic turbulent coherent structures emerge in three clearcut regions: (i) near the front region of the cavity, (ii) along the side cavity edges (see the presence of side vortices), and (iii) in the rear side of the cavity and downstream (vortex shedding). Highly energetic vortical coherent structures can also be observed in the cavity inside. These phenomena related to coherent structure dynamics are consistent with the findings and observations of [
39]. The streamwise counter-rotating vortex pair described in
Figure 9b is accurately captured by positive iso-surfaces of the
. Interestingly, downstream of the cavity, where flow separates, the vortex adopts a horseshoe or hairpin shape (or omega-shaped vortices), as described by [
40], with the typical leg, neck, and head. These coherent structures are commonly found in turbulent boundary layers, particularly in the log-region, which is mainly responsible for the generation of Reynolds shear stresses and turbulence production [
40]. The vortex shedding downstream of the cavity resembles the jet in a cross-flow situation [
41], where horseshoe vortices are continuously created by the interaction of the incoming shear layer with the vertical jet. It is hypothesized that the streamwise counter-rotating vortex pair at the end of the cavity lifts up low-speed fluid, interacting with the incoming shear layer over the cavity and mimicking the cross-flow jet problem. Highly strained flow (blue iso-surfaces) can be seen near vortex cores, predominantly in the cavity lateral sides and at the rear edge.
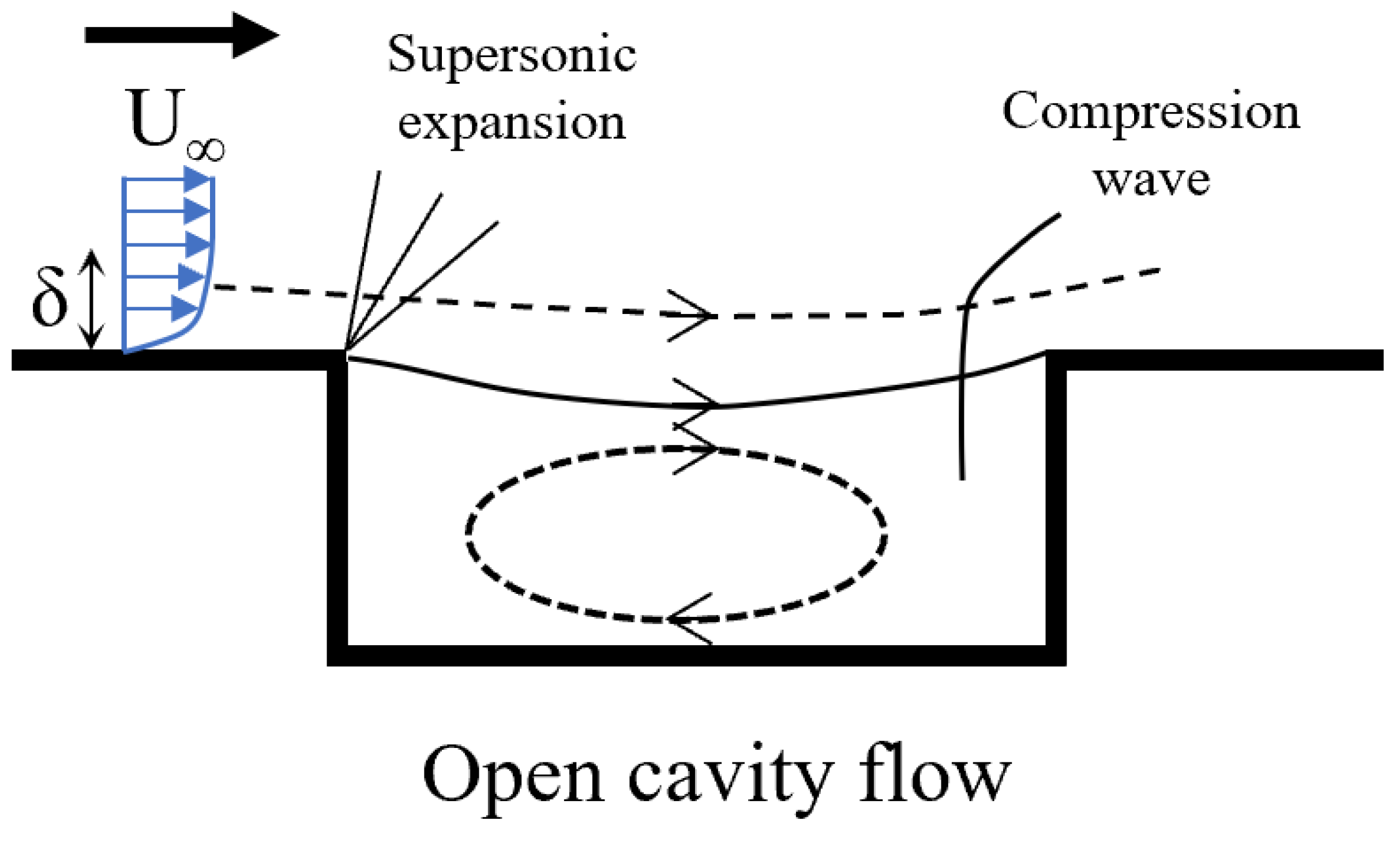
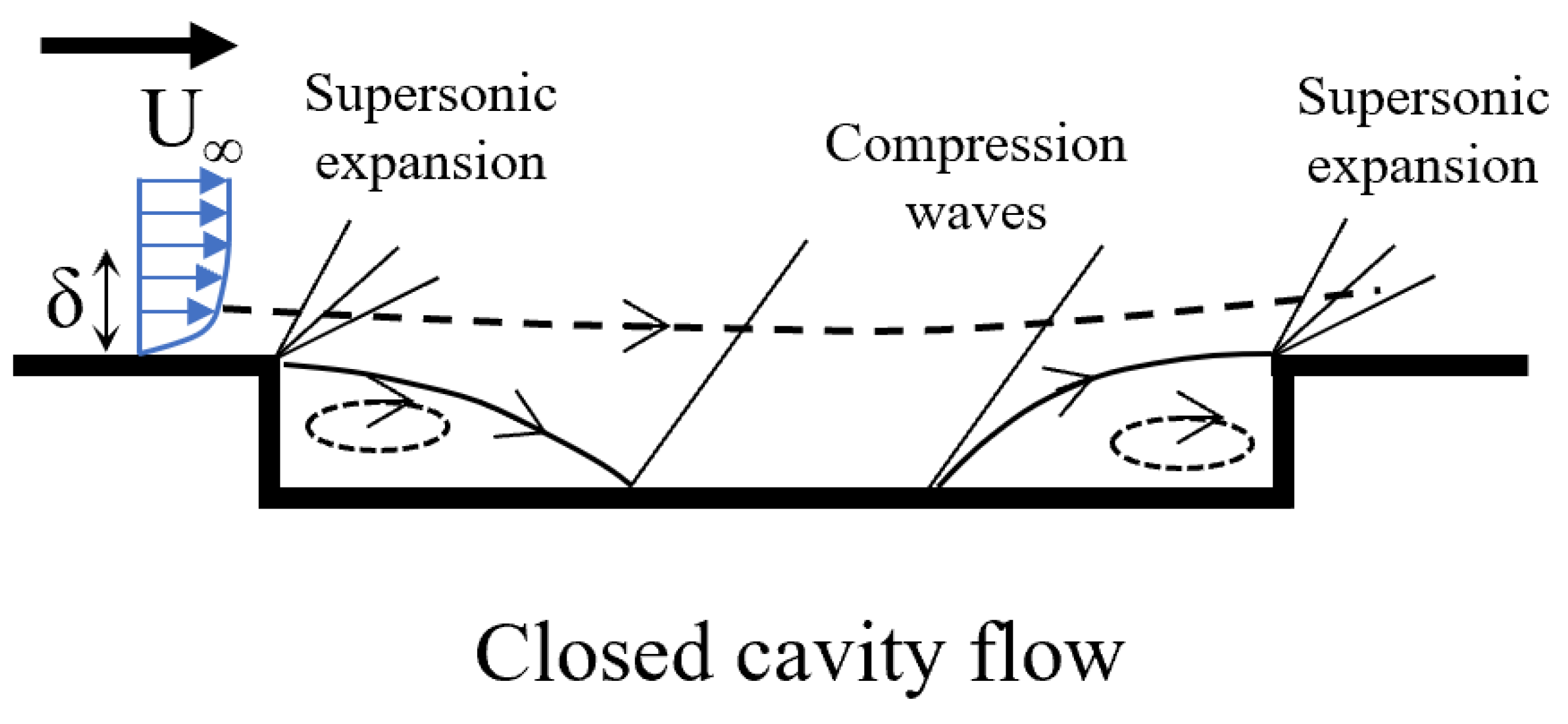
Turning to the Mach 1.35 case, it is important to emphasize the acoustic wave system generated when the incoming turbulent flow is supersonic.
Figure 13 illustrates idealized time-averaged situations of the incoming supersonic boundary layer facing a rectangular cavity, adapted from [
42]. According to Aradag and Knight [
42], and similarly defined by [
37] for incoming subsonic flow in rectangular cavities, one can define two major cavity types based on the
ratio: open and closed cavity configurations. In the open or “deep” cavity system (i.e., at low values of
), the turbulent free shear layer reattaches on the rear part of the cavity (see top image in
Figure 13); therefore, creating a sole recirculation region in the mean flow. On the other hand, in the closed or “shallow” cavity (i.e., at large values of
), the shear layer reattaches on the cavity floor and the vortex system resembles a combination of a backward- and forward-facing step. While the flow physics in terms of open and closed cavities is somehow similar for incoming subsonic and supersonic flow; there is no general consensus about the critical
values. For
ratios greater than 13, it indicates closed cavity flow. While
factors smaller than 10 indicate open cavity flow [
42]. Furthermore, in Crook et al. [
37] 8 and 7 are reported as these extreme
values for incompressible flows. Clearly, one has to visualize the internal vortex system and the flow recirculation zone for better ascertaining whether one is dealing with open or closed cavity flows. Furthermore, the most important aspect to highlight in supersonic cavities is the presence of compression and expansion waves according to the cavity type [
42], as depicted in
Figure 13.
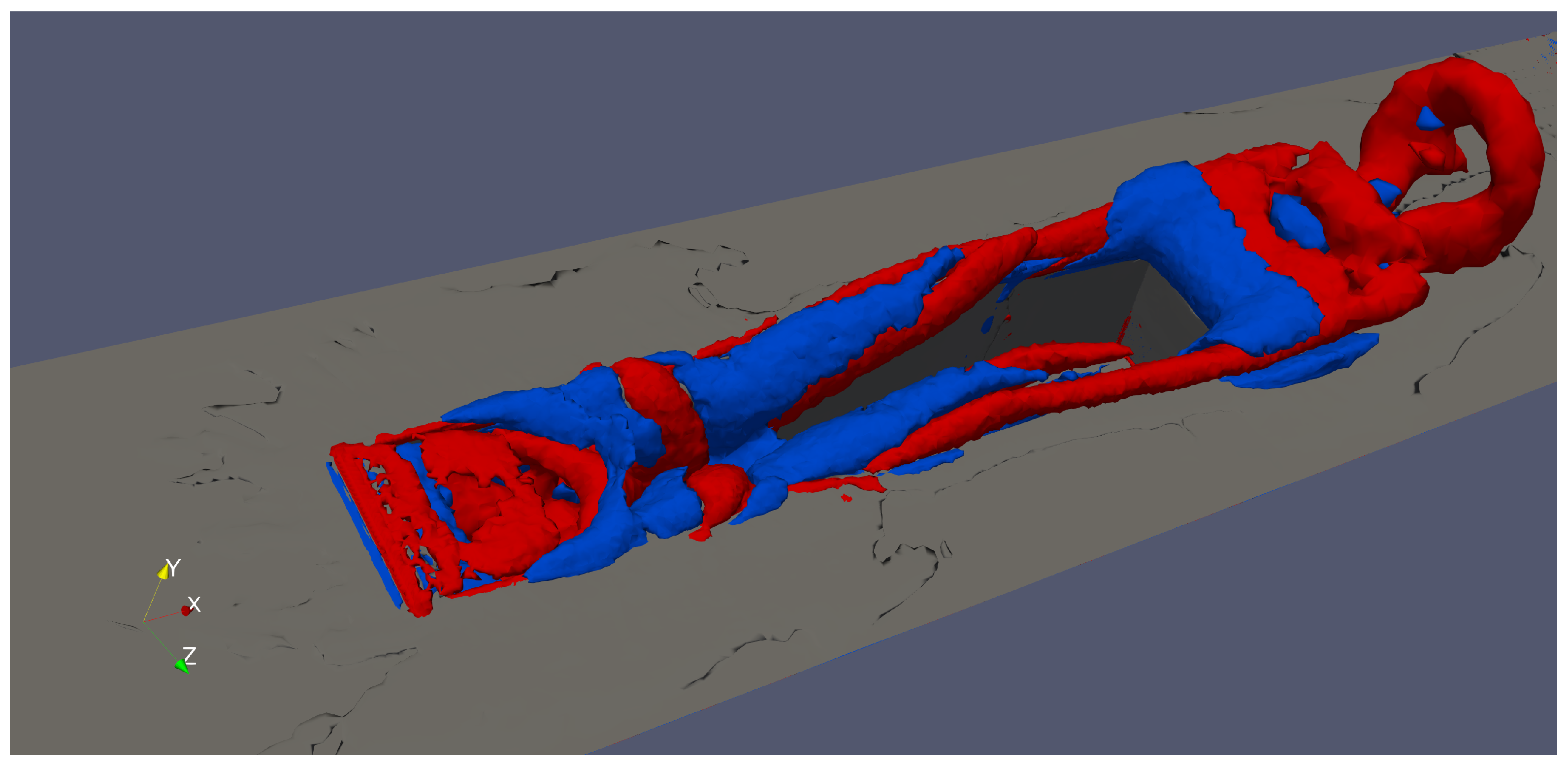
Figure 14 depicts iso-surfaces of positive (vortex cores) and negative (highly deformed or strained flow) values of the
from [
38] for the supersonic incoming flow, i.e., at
= 1.35. The formation of horseshoe, hairpin-shaped, or omega-shaped vortices downstream of the cavity is evidently seen, as in the subsonic case in
Figure 12. However, the distribution of volumes with either highly rotational (in red) or strained (in blue) flow is clearly different at
= 0.85 and 1.35, respectively, which indicates that the vortex systems are rather distinctive in the supersonic case: most of the front side of the cavity is populated by vortex cores (rotational flow), whereas, by the rear cavity side and downstream, various zones coexist, either with a high level of rotation or deformation in a “twisted” fashion not observed in the subsonic case. The presence of highly strained flow downstream of the rear cavity could be linked to the significant unsteady expansion, which will be further discussed in this manuscript. In
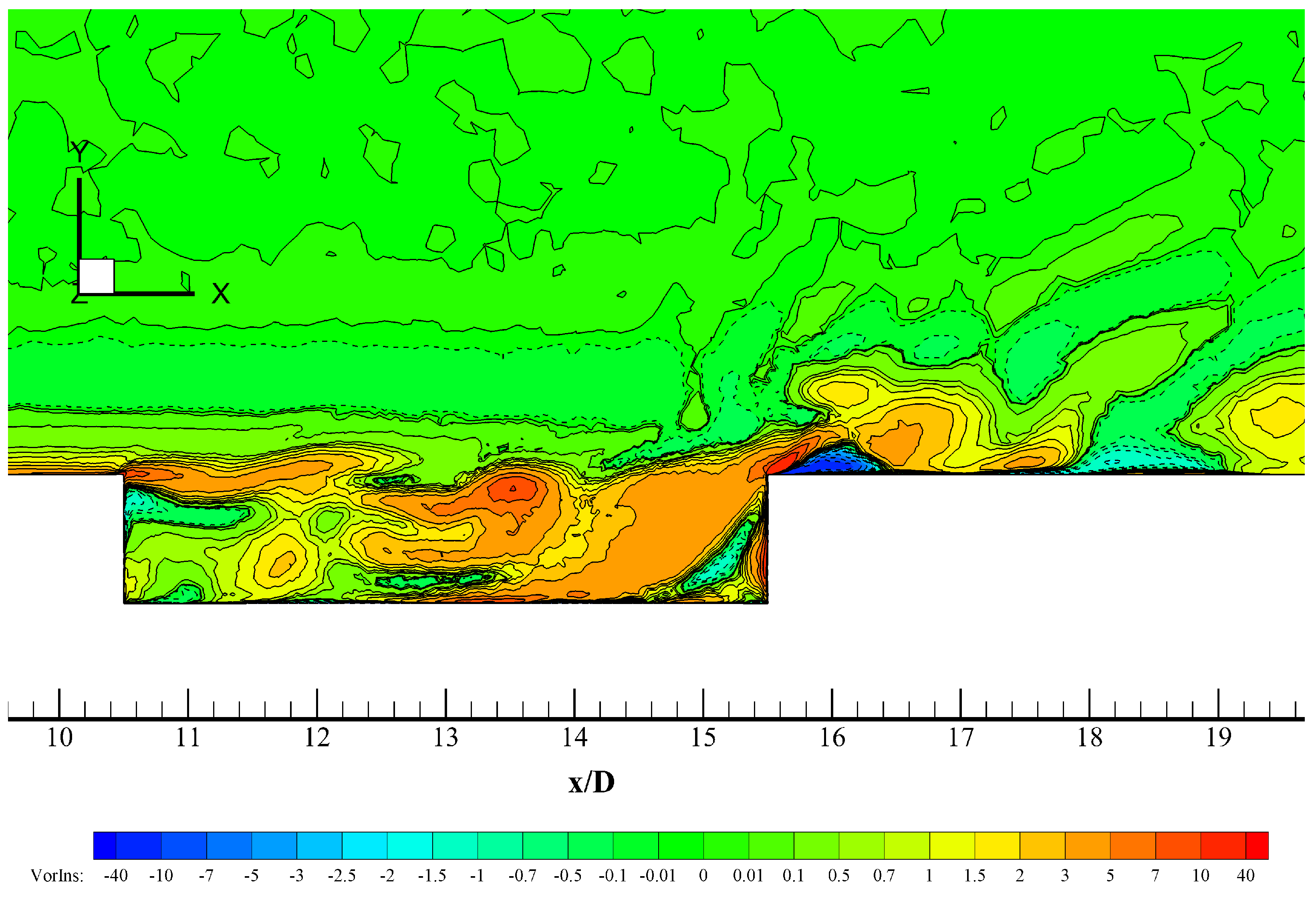
Figure 15, iso-contours of instantaneous spanwise vorticity are shown at
= 1.35 and at the centerline plane
of the cavity (i.e., at
= 0). As previously described, inward vorticity vectors or clockwise spin are represented by positive solid isolines, while outward vorticity vectors or counter-clockwise spin zones are represented by negative dashed curves. At this instant, two large vortical structures with opposite signs or a spanwise counter-rotating vortex pair (clockwise and counter-clockwise, respectively) are observed in the cavity center (12 <
< 14.5). The incoming turbulent shear layer penetrates further, almost to the cavity bottom, and this clockwise spanwise vortex induces the nearby counter-clockwise vortex (by viscous effects and angular momentum conservation). At this point, the previously described instantaneous spanwise vortex pair leads to the generation of high levels of turbulent kinetic energy, wall-normal mixing, and strong pressure gradients (with minimum pressure at vortex centers) inside the cavity. Additionally, the instantaneous vortex pair promotes the vortex formation (with opposite sign) in the vicinity of the cavity via viscous effects. It is worth highlighting that for this narrow cavity (
= 5) the turbulent flow generates highly unsteady three-dimensional vortical structures that significantly influence the cavity response.
Figure 16 exhibits iso-contours of instantaneous spanwise vorticity at
= 1.35 and at an off-centerline plane
(i.e., at
= 0.25). The strong differences in instantaneous spanwise vorticity distribution at
= 0.25 with respect to the cavity centerline plane (
= 0) evidences the non-two-dimensional nature of this cavity configuration. In
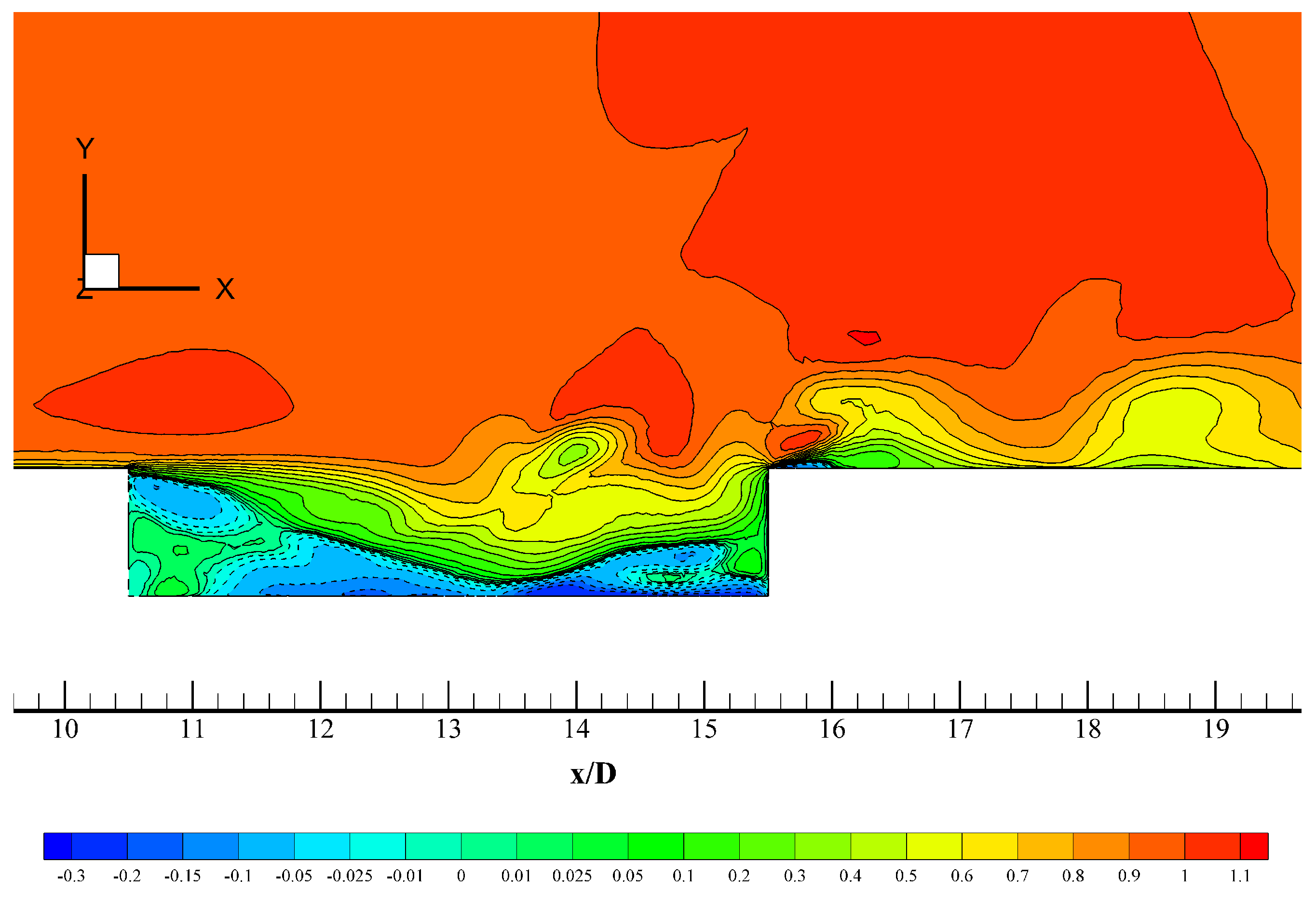
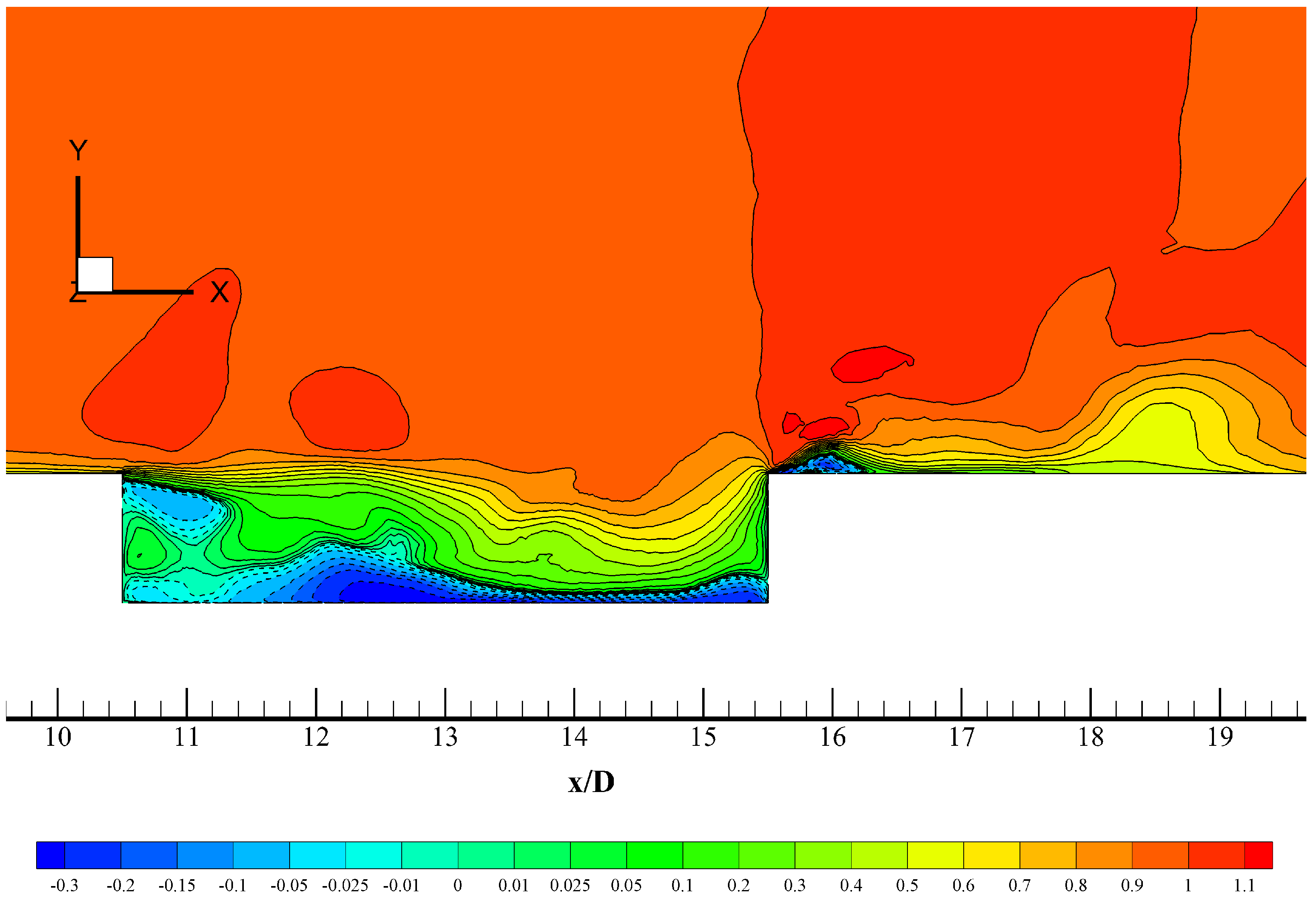
Figure 17, contours of instantaneous streamwise velocity normalized by the free-stream velocity are shown for the supersonic incoming flow case. The incoming turbulent shear layer develops from the front cavity edge, bends down into the first half (10.4 <
< 13.4) due to pressure gradients, and impinges on the bottom. A clear backflow region is observed (blue) with negative values of the streamwise velocity. The red region just above the cavity edge indicates the presence of moderate instantaneous supersonic expansion or a favorable pressure gradient (FPG). In a similar manner, the flow strongly accelerates by the rear edge of the cavity. That strong supersonic expansion or FPG in the outer region and free-stream might be the reason for the presence of extremely strained flow at the trailing edge, represented by iso-surfaces of the
(in blue) in
Figure 14. In addition, the very strong adverse pressure gradient (APG) generated by the rear cavity edge in the near-wall region is responsible for the downstream flow separation bubble. Outside of the rectangular cavity the flow is supersonic, whereas subsonic flow recirculating volumes take place inside [
42]. Also, acoustic waves created due to the impingement of the turbulent shear layer at the rear wall of the cavity are able to propagate upstream through the subsonic region of the flow.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















