A Review of Smart Materials in Tactile Actuators for Information Delivery

 ,
,  ,
,
Abstract
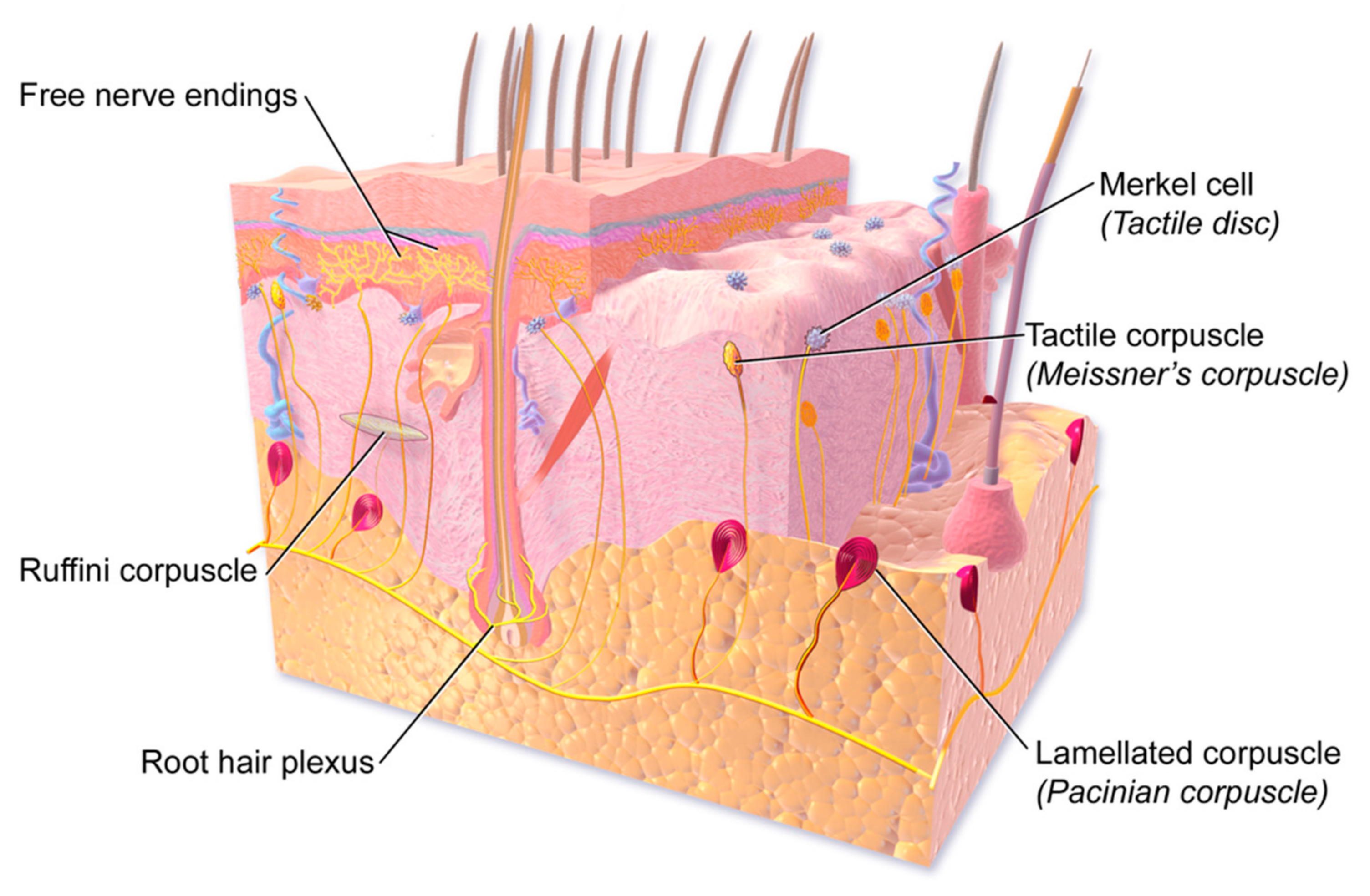
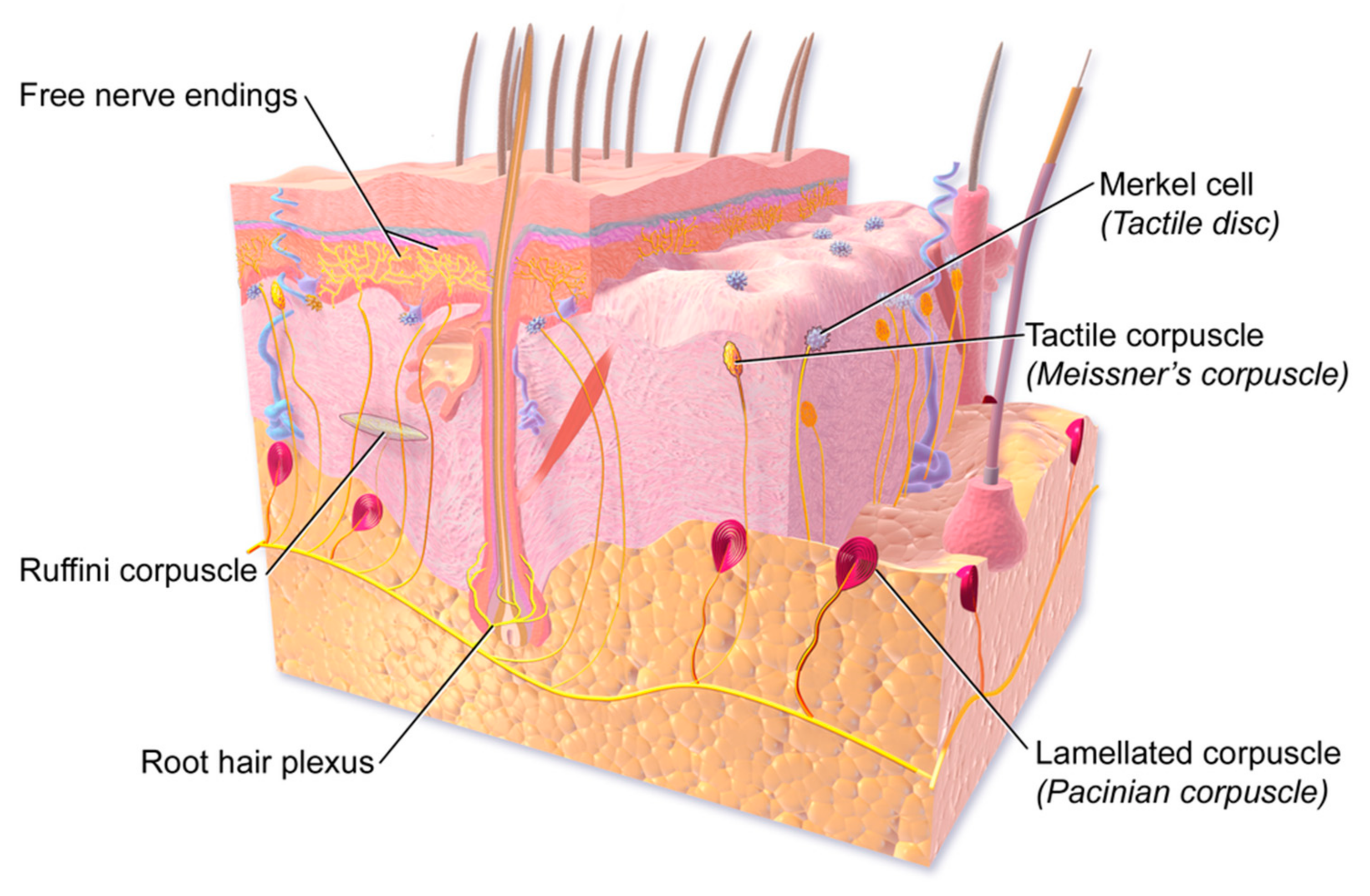
:1. Mechanoreceptors
2. Stimulation Methods and Actuation Technologies
2.1. Thermal
2.2. Electrotactile
2.3. Mechanical
2.3.1. Static Indentation
2.3.2. Vibration
2.3.3. Surface Acoustic Waves
2.3.4. Electrorheological and Magnetorheological Fluids
3. Vibrotactile Actuators for Tactile Feedback
3.1. Rotary Electromagnet Actuators
3.2. Linear Electromagnetic Actuators
3.3. Electroactive Polymer
3.4. Shape Memory Alloy
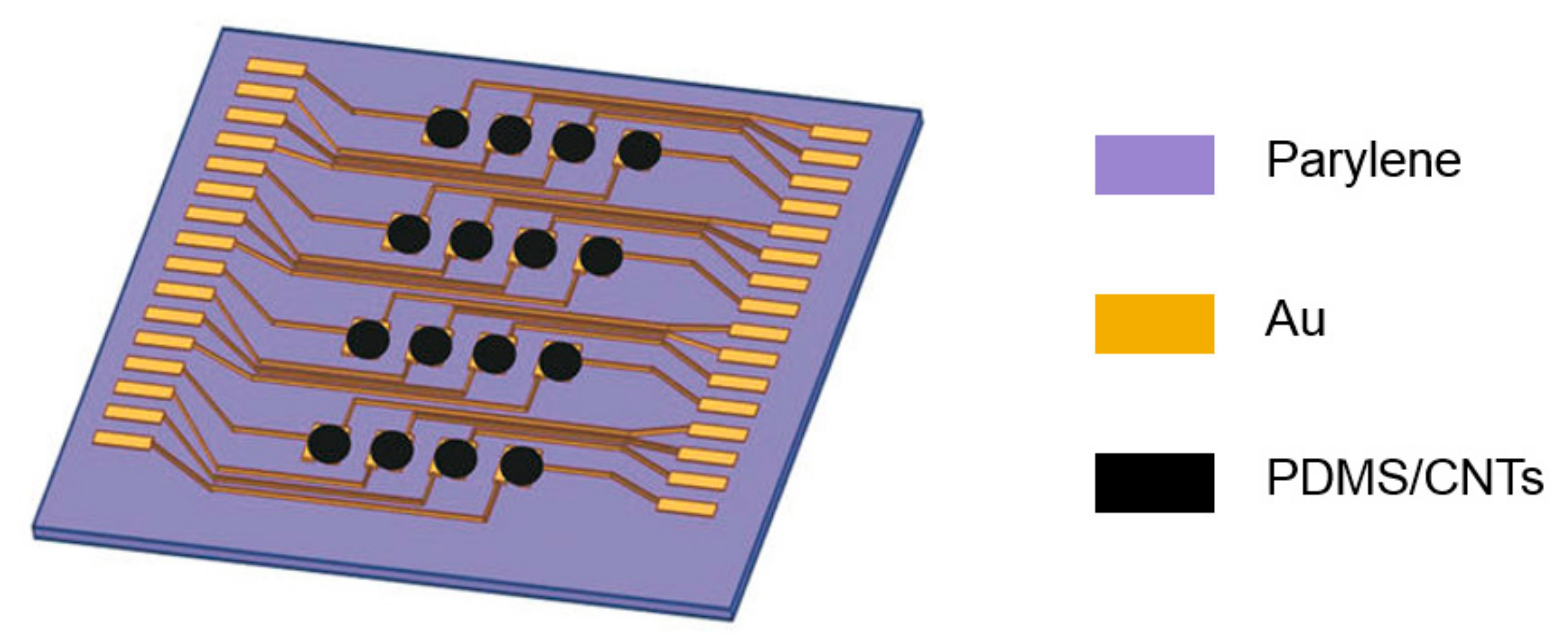
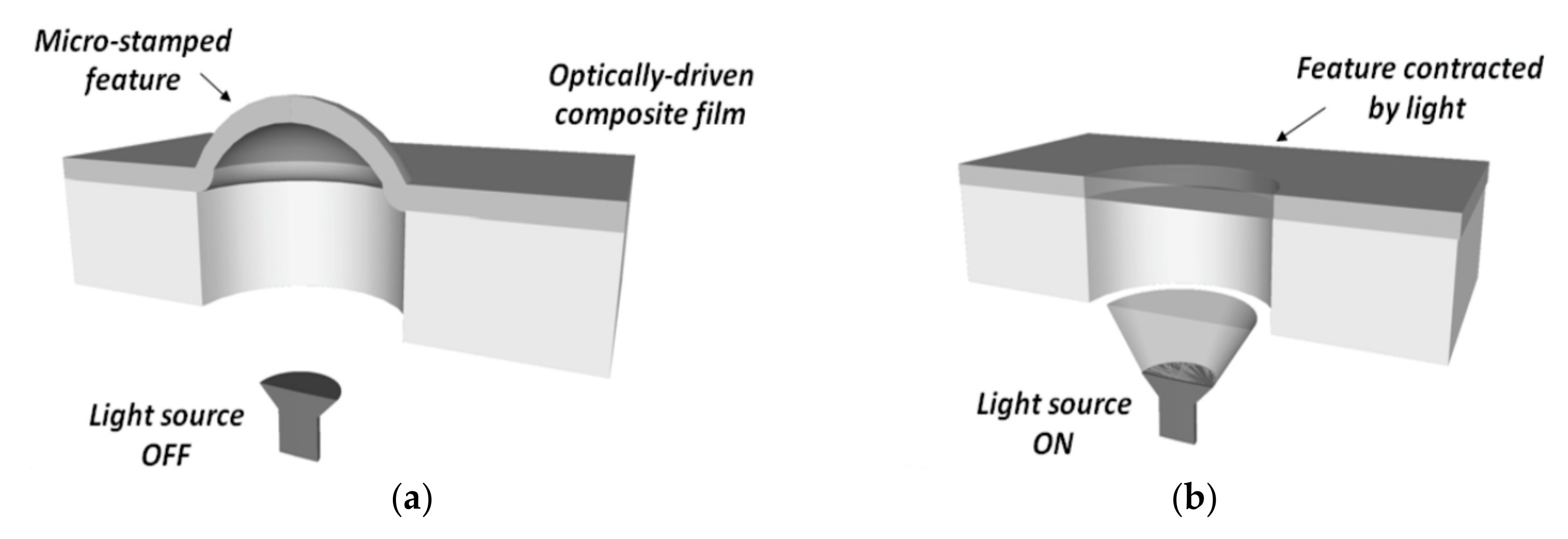
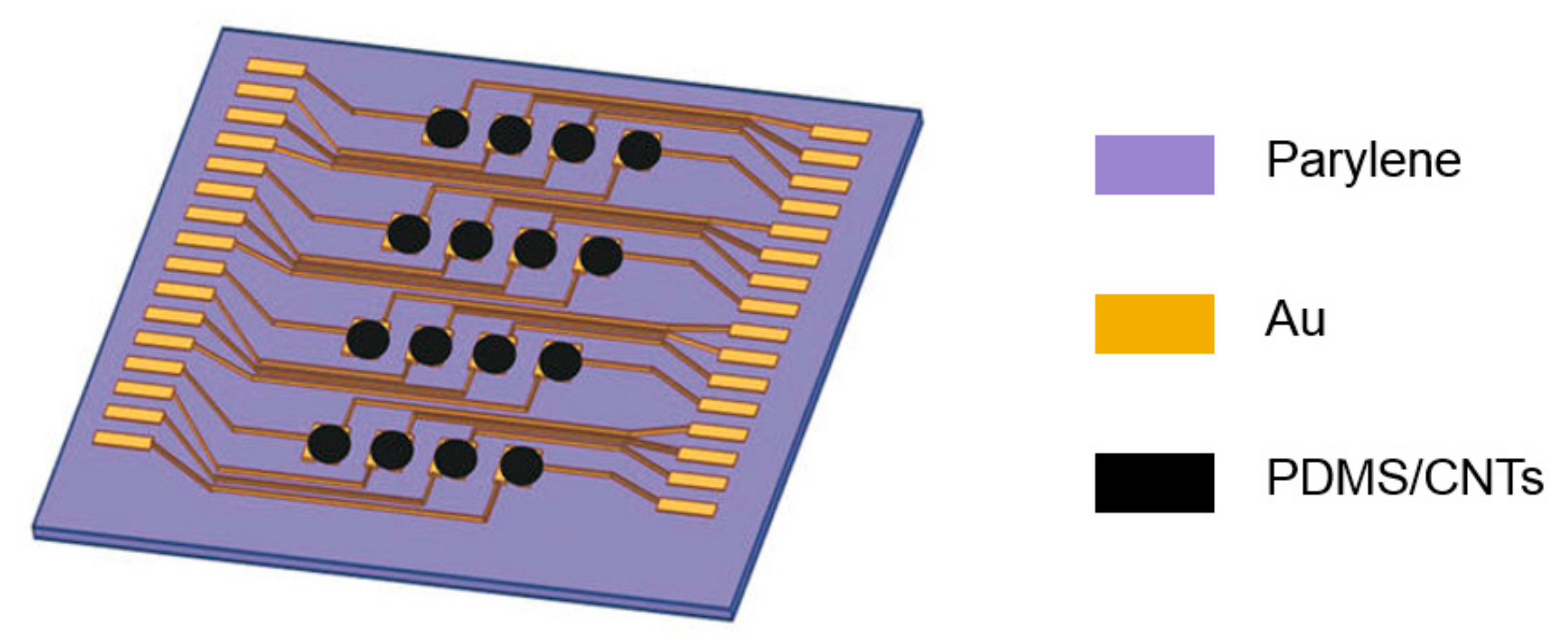
3.5. Carbon Nanotube
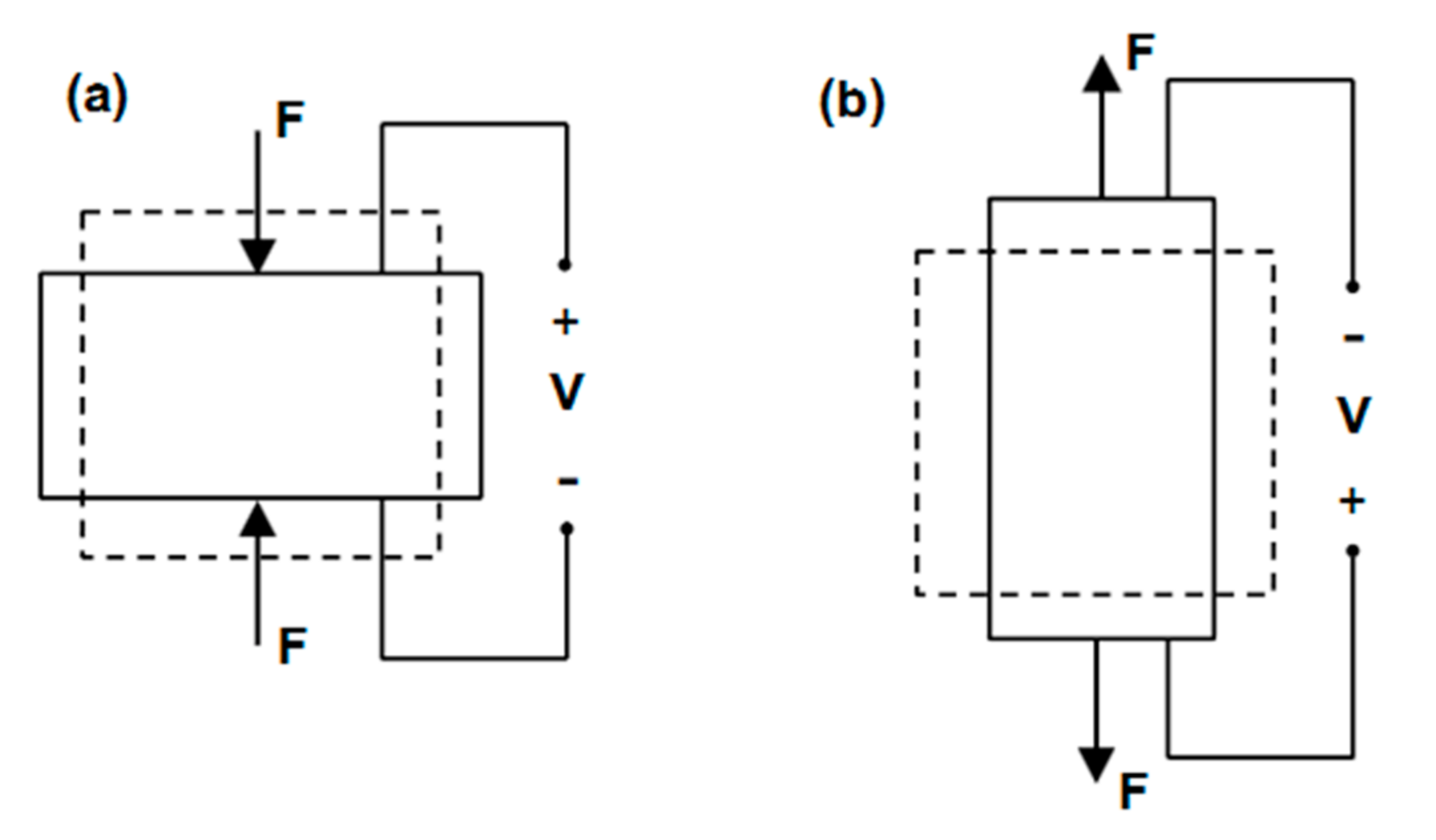
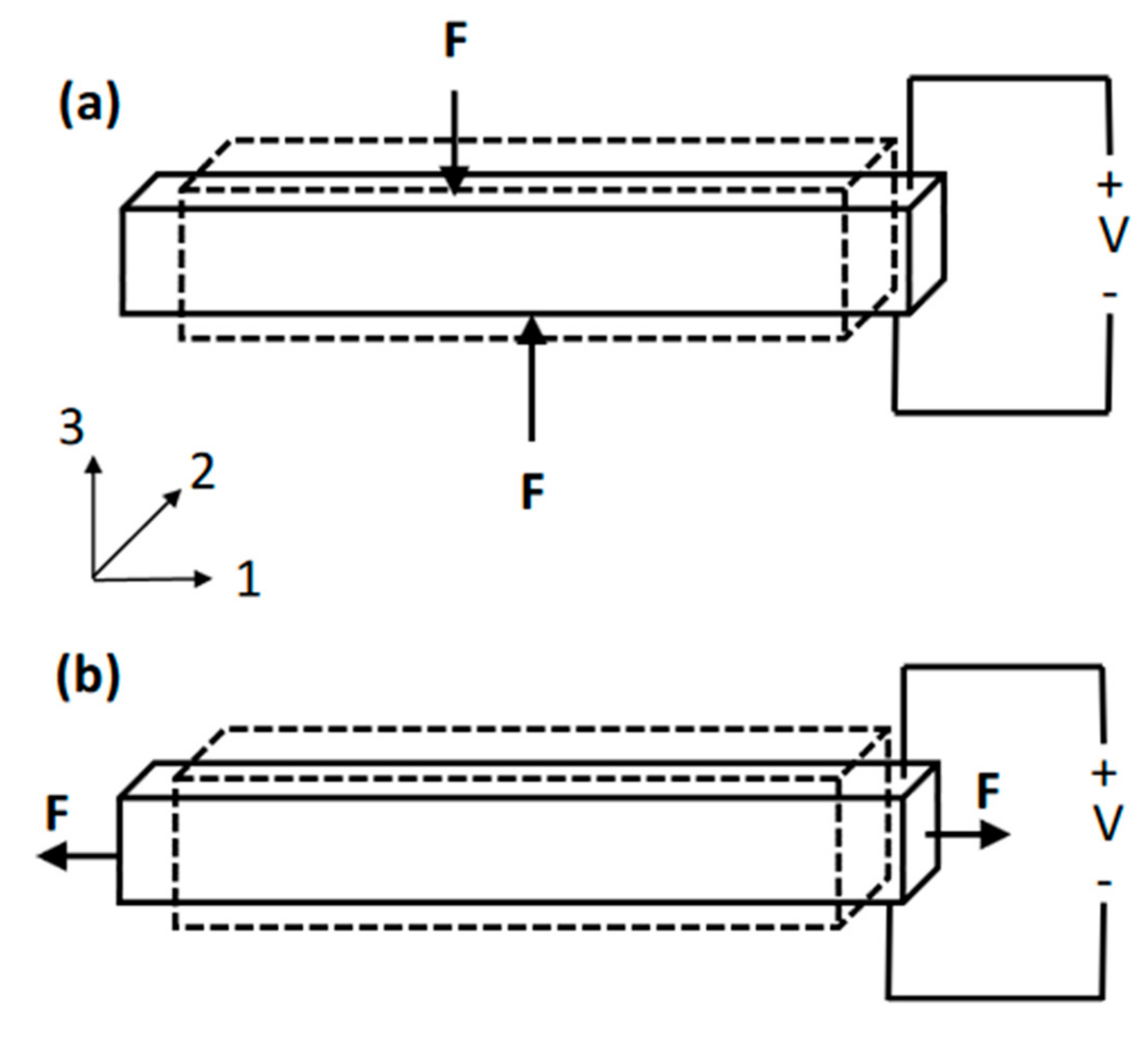
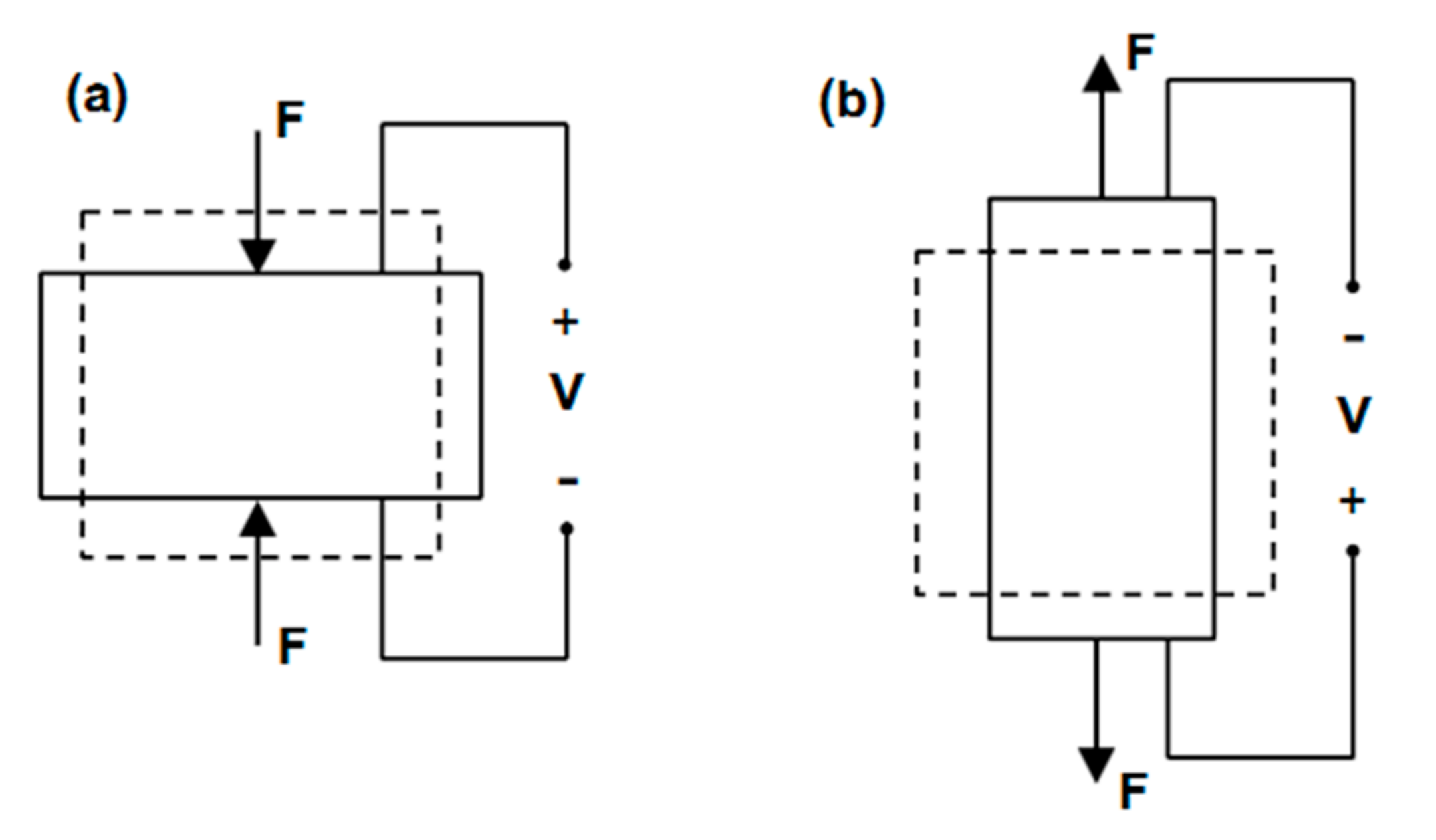
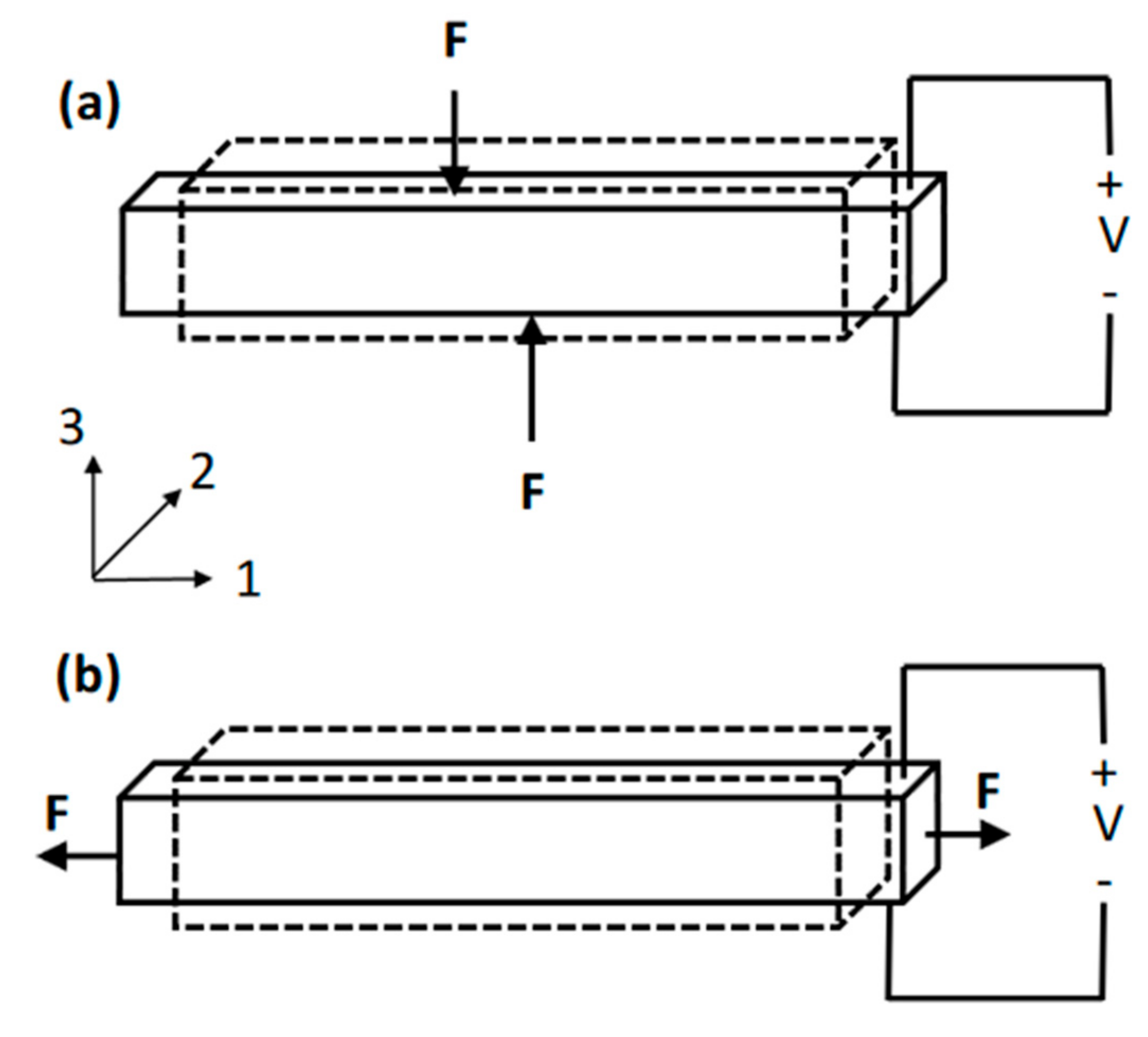
3.6. Piezoelectric Actuators
3.6.1. Piezoelectric Bending Beam Actuators
3.6.2. Piezoelectric Extensional Actuators
3.7. Pneumatic Actuation
4. Conclusions
Conflicts of Interest:
References
- Schultz, R.A.; Miller, D.C.; Kerr, C.S.; Micheli, L. Mechanoreceptors in human cruciate ligaments. A histological study. J. Bone Jt. Surg. Am. 1984, 66, 1072–1076. [Google Scholar] [CrossRef]
- Vallbo, Å.B.; Johansson, R.S. Properties of cutaneous mechanoreceptors in the human hand related to touch sensation. Hum. Neurobiol. 1984, 3, 3–14. [Google Scholar] [PubMed]
- Blausen.com Staff. Medical Gallery of Blausen Medical 2014. WikiJ. Med. 2014. [Google Scholar] [CrossRef]
- Choi, S.; Kuchenbecker, K.J. Vibrotactile display: Perception, technology, and applications. Proc. IEEE 2013, 101, 2093–2104. [Google Scholar] [CrossRef]
- Johnson, K.O. The roles and functions of cutaneous mechanoreceptors. Curr. Opin. Neurobiol. 2001, 11, 455–461. [Google Scholar] [CrossRef]
- Isseroff, R.G.; Sarne, Y.; Carmon, A.; Isseroff, A. Cortical potentials evoked by innocuous tactile and noxious thermal stimulation in the rat: Differences in localization and latency. Behav. Neural Biol. 1982, 35, 294–307. [Google Scholar] [CrossRef]
- Vallbo, Å.B.; Hagbarth, K.E. Activity from skin mechanoreceptors recorded percutaneously in awake human subjects. Exp. Neurol. 1968, 21, 270–289. [Google Scholar] [CrossRef]
- Lechelt, E.C. Tactile spatial anisotropy with static stimulation. Bull. Psychon. Soc. 1992, 30, 140–142. [Google Scholar] [CrossRef]
- Verrillo, R.T.; Fraioli, A.J.; Smith, X.R.L. Sensation magnitude of vibrotactile stimuli. Atten. Percept. Psychophys. 1969, 6, 366–372. [Google Scholar] [CrossRef]
- Verrillo, R.T. Vibrotactile thresholds for hairy skin. J. Exp. Psychol. 1966, 72, 47–50. [Google Scholar] [CrossRef] [PubMed]
- Ho, C.; Lukin, J.A. Encyclopedia of Life Sciences; Wiley-Blackwell: Hoboken, NJ, USA, 2000. [Google Scholar]
- Downar, J.; Crawley, A.P.; Mikulis, D.J.; Davis, K.D. A multimodal cortical network for the detection of changes in the sensory environment. Nat. Neurosci. 2000, 3, 277–283. [Google Scholar] [PubMed]
- Mao, N. Towards objective discrimination & evaluation of fabric tactile properties: Quantification of biaxial fabric deformations by using energy methods. In Proceedings of the 14th AUTEX World Textile Conference, Bursa, Turkey, 26–28 May 2014. [Google Scholar]
- Yamamoto, A.; Cros, B.; Hashimoto, H.; Higuchi, T. Control of thermal tactile display based on prediction of contact temperature. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation (ICRA’04), New Orleans, LA, USA, 26 April–1 May 2004; Volume 2, pp. 1536–1541. [Google Scholar]
- Kron, A.; Schmidt, G. Multi-fingered tactile feedback from virtual and remote environments. In Proceedings of the IEEE 11th Symposium on in Haptic Interfaces for Virtual Environment and Teleoperator Systems (HAPTICS 2003), Los Angeles, CA, USA, 22–23 March 2003; pp. 16–23. [Google Scholar]
- Jia, L.; Shi, Z.; Zang, X.; Müller, H.J. Watching a real moving object expands tactile duration: The role of task-irrelevant action context for subjective time. Atten. Percept. Psychophys. 2015, 77, 2768–2780. [Google Scholar] [CrossRef] [PubMed]
- Strong, R.M.; Troxel, D.E. An electrotactile display. IEEE Trans. Man-Mach. Syst. 1970, 11, 72–79. [Google Scholar] [CrossRef]
- Kajimoto, H.; Kawakami, N.; Tachi, S. Optimal design method for selective nerve stimulation and its application to electrocutaneous display. In Proceedings of the 10th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (HAPTICS 2002), Orlando, FL, USA, 24–25 March 2002; pp. 303–310. [Google Scholar]
- Kaczmarek, K.A.; Webster, J.G.; Bach-y-Rita, P.; Tompkins, W.J. Electrotactile and vibrotactile displays for sensory substitution systems. IEEE Trans. Biomed. Eng. 1991, 38, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Imai, T.; Kamping, S.; Breitenstein, C.; Pantev, C.; Lütkenhöner, B.; Knecht, S. Learning of tactile frequency discrimination in humans. Hum. Brain Mapp. 2003, 18, 260–271. [Google Scholar] [CrossRef] [PubMed]
- Field, T.M. Touch therapy effects on development. Int. J. Behav. Dev. 1998, 22, 779–797. [Google Scholar] [CrossRef]
- Lee, M.H.; Nicholls, H.R. Review Article Tactile sensing for mechatronics—A state of the art survey. Mechatronics 1999, 9, 1–31. [Google Scholar] [CrossRef]
- Gescheider, G.A.; Wright, J.H.; Verrillo, R.T. Information-Processing Channels in the Tactile Sensory System: A Psychophysical and Physiological Analysis; Psychology Press: Milton Park, UK, 2008. [Google Scholar]
- Goldstein, H. Communication intervention for children with autism: A review of treatment efficacy. J. Autism Dev. Disord. 2002, 32, 373–396. [Google Scholar] [CrossRef] [PubMed]
- Kotani, K.; Ito, S.; Miura, T.; Horii, K. Evaluating tactile sensitivity adaptation by measuring the differential threshold of archers. J. Physiol. Anthropol. 2007, 26, 143–148. [Google Scholar] [CrossRef] [PubMed]
- Takasaki, M.; Kotani, H.; Mizuno, T.; Nara, T. Reproduction of tactile sensation using SAW tactile display. In Proceedings of the First IEEE Technical Exhibition Based Conference on Robotics and Automation (TExCRA’04), Tokyo, Japan, 18–19 November 2004; pp. 67–68. [Google Scholar]
- Nara, T.; Takasaki, M.; Maeda, T.; Higuchi, T.; Ando, S.; Tachi, S. Surface Acoustic Wave (SAW) tactile display based on properties of mechanoreceptors. In Proceedings of the IEEE Virtual Reality, Yokohama, Japan, 13–17 March 2001; pp. 13–20. [Google Scholar]
- Soto-Faraco, S.; Sinnett, S.; Alsius, A.; Kingstone, A. Spatial orienting of tactile attention induced by social cues. Psychon. Bull. Rev. 2005, 12, 1024–1031. [Google Scholar] [CrossRef] [PubMed]
- Soto-Faraco, S.; Ronald, A.; Spence, C. Tactile selective attention and body posture: Assessing the multisensory contributions of vision and proprioception. Atten. Percept. Psychophys. 2004, 66, 1077–1094. [Google Scholar] [CrossRef]
- Engel, J.; Chen, J.; Fan, Z.; Liu, C. Polymer micromachined multimodal tactile sensors. Sens. Actuators A Phys. 2005, 117, 50–61. [Google Scholar] [CrossRef]
- Boldea, I.; Nasar, S.A. Linear electric actuators and generators. IEEE Trans. Energy Convers. 1999, 14, 712–717. [Google Scholar] [CrossRef]
- Bar-Cohen, Y. Electroactive polymers for refreshable Braille displays. SPIE Newsroom 2009, 11. [Google Scholar] [CrossRef]
- Bicchi, A.; Scilingo, E.P.; Ricciardi, E.; Pietrini, P. Tactile flow explains haptic counterparts of common visual illusions. Brain Res. Bull. 2008, 75, 737–741. [Google Scholar] [CrossRef] [PubMed]
- Jairakrean, S.; Chanthasopeephan, T. Position control of SMA actuator for 3D tactile display. In Proceedings of the IEEE International Conference on Rehabilitation Robotics (ICORR 2009), Kyoto, Japan, 23–26 June 2009; pp. 234–239. [Google Scholar]
- Matsunaga, T.; Makishi, W.; Totsu, K.; Esashi, M.; Haga, Y. 2-D and 3-D tactile pin display using SMA micro-coil actuator and magnetic latch. In Proceedings of the 13th International Conference on Solid-State Sensors, Actuators and Microsystems, 2005. Digest of Technical Papers, Seoul, South Korea, 5–9 June 2005; Volume 1, pp. 325–328. [Google Scholar]
- Mansour, N.A.; El-Bab, A.M.F.; Assal, S.F. A novel SMA-based micro tactile display device for elasticity range of human soft tissues: Design and simulation. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, South Korea, 7–11 July 2015; pp. 447–452. [Google Scholar]
- Robertson, D.H.; Brenner, D.W.; Mintmire, J.W. Energetics of nanoscale graphitic tubules. Phys. Rev. B 1992, 45, 12592–12595. [Google Scholar] [CrossRef]
- Yu, M.; Files, B.S.; Arepalli, S.; Ruoff, R.S. Tensile loading of ropes of single wall carbon nanotubes and their mechanical properties. Phys. Rev. Lett. 2000, 84, 5552–5555. [Google Scholar] [CrossRef] [PubMed]
- Xie, X.; Liu, S.; Yang, C.; Yang, Z.; Xu, J.; Zhai, X. The application of smart materials in tactile actuators for tactile information delivery. arXiv, 2017; arXiv:1708.07077. [Google Scholar]
- Peng, B.; Locascio, M.; Zapol, P.; Li, S.; Mielke, S.L.; Schatz, G.C.; Espinosa, H.D. Measurements of near-ultimate strength for multiwalled carbon nanotubes and irradiation-induced crosslinking improvements. Nat. Nanotechnol. 2008, 3, 626–631. [Google Scholar] [CrossRef] [PubMed]
- Wei, B.Q.; Vajtai, R.; Ajayan, P.M. Reliability and current carrying capacity of carbon nanotubes. Appl. Phys. Lett. 2001, 79, 1172–1174. [Google Scholar] [CrossRef]
- Pop, E.; Mann, D.; Wang, Q.; Goodson, K.; Dai, H. Thermal conductance of an individual single-wall carbon nanotube above room temperature. Nano Lett. 2006, 6, 96–100. [Google Scholar] [CrossRef] [PubMed]
- Avouris, P. Molecular electronics with carbon nanotubes. Acc. Chem. Res. 2002, 35, 1026–1034. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Zhang, X.; Zhao, J.; Meng, F.; Xu, G.; Yong, Z.; Jia, J.; Zhang, Z.; Li, Q. Enhancement of carbon nanotube fibres using different solvents and polymers. Compos. Sci. Technol. 2012, 72, 1402–1407. [Google Scholar] [CrossRef]
- Beese, A.M.; Sarkar, S.; Nair, A.; Naraghi, M.; An, Z.; Moravsky, A.; Loutfy, R.O.; Buehler, M.J.; Nguyen, S.T.; Espinosa, H.D. Bio-inspired carbon nanotube—Polymer composite yarns with hydrogen bond-mediated lateral interactions. ACS Nano 2013, 7, 3434–3446. [Google Scholar] [CrossRef] [PubMed]
- Hill, F.A.; Havel, T.F.; Lashmore, D.; Schauer, M.; Livermore, C. Storing energy and powering small systems with mechanical springs made of carbon nanotube yarn. Energy 2014, 76, 318–325. [Google Scholar] [CrossRef]
- Liu, S.; Martin, C.; Lashmore, D.; Schauer, M.; Livermore, C. Carbon nanotube torsional springs for regenerative braking systems. J. Micromech. Microeng. 2015, 25. [Google Scholar] [CrossRef]
- Lima, M.D.; Li, N.; de Andrade, M.J.; Fang, S.; Oh, J.; Spinks, G.M.; Kozlov, M.E.; Haines, C.S.; Suh, D.; Kim, S.J. Electrically, chemically, and photonically powered torsional and tensile actuation of hybrid carbon nanotube yarn muscles. Science 2012, 338, 928–932. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Liu, C.; Liu, K.; Meng, C.; Hu, C.; Wang, J.; Fan, S. High-performance, low-voltage, and easy-operable bending actuator based on aligned carbon nanotube/polymer composites. ACS Nano 2011, 5, 1588–1593. [Google Scholar] [CrossRef] [PubMed]
- Baughman, R.H.; Cui, C.; Zakhidov, A.A.; Iqbal, Z.; Barisci, J.N.; Spinks, G.M.; Wallace, G.G.; Mazzoldi, A.; de Rossi, D.; Jaschinski, O.; et al. Carbon nanotube actuators. Science 1999, 284, 1340–1344. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Peng, H.; Wang, X.; Chen, X.; Yang, C.; Yang, B.; Liu, J. PDMS/MWCNT-based tactile sensor array with coplanar electrodes for crosstalk suppression. Microsyst. Nanoeng. 2016, 2. [Google Scholar] [CrossRef]
- Camargo, C.J.; Torras, N.; Campanella, H.; Marshall, J.E.; Zinoviev, K.; Campo, E.M.; Terentjev, E.M.; Esteve, J. Microstamped opto-mechanical actuator for tactile displays. In Nano-Opto-Mechanical Systems (NOMS); International Society for Optics and Photonics: Bellingham, WA, USA, 2011; Volume 8107, p. 810709. [Google Scholar]
- Pyo, S.; Lee, J.I.; Kim, M.O.; Chung, T.; Oh, Y.; Lim, S.C.; Park, J.; Kim, J. Batch fabricated flexible tactile sensor based on carbon nanotube-polymer composites. In Proceedings of the Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013. [Google Scholar]
- Jung, H.Y.; Araujo, P.T.; Kim, Y.L.; Jung, S.M.; Jia, X.; Hong, S.; Ahn, C.W.; Kong, J.; Dresselhaus, M.S.; Kar, S.; et al. Sculpting carbon bonds for allotropic transformation through solid-state re-engineering of–sp 2 carbon. Nat. Commun. 2014, 5. [Google Scholar] [CrossRef] [PubMed]
- Liu, T. Passively-Switched Vibrational Energy Harvesters. Ph.D. Thesis, Northeastern University, Boston, MA, USA, ProQuest Dissertations Publishing, Ann Arbor, MI, USA, 2017. [Google Scholar]
- Liu, T.; Pierre, R.S.; Livermore, C. Passively-switched energy harvester for increased operational range. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- Liu, T.; Livermore, C. A compact architecture for passively-switched energy harvesters. J. Phys. Conf. Ser. 2015, 660. [Google Scholar] [CrossRef]
- Liu, T.; Livermore, C. Passively tuning harvesting beam length to achieve very high harvesting bandwidth in rotating applications. In Proceedings of the PowerMEMS, Atlanta, GA, USA, 2–5 December 2015; pp. 492–495. [Google Scholar]
- Liu, T.; Liu, S.; Xie, X.; Yang, C.; Yang, Z.; Zhai, X. Smart materials and structures for energy harvesters. arXiv, 2017; arXiv:1709.00493. [Google Scholar]
- Velazquez, R.; Pissaloux, E.; Szewczyk, J.; Hafez, M. Miniature Shape Memory Alloy Actuator for Tactile Binary Information Display. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Shah, C.; Bouzit, M.; Youssef, M.; Vasquez, L. Evaluation of RU-Netra Tactile Feedback Navigation System for the Visually Impaired. In Proceedings of the 2006 International Workshop on Virtual Rehabilitation, New York, NY, USA, 29–30 August 2006. [Google Scholar]
- Xie, X.; Zaitsev, Y.; Velásquez-García, L.F.; Teller, S.J.; Livermore, C. Scalable, MEMS-enabled, vibrational tactile actuators for high resolution tactile displays. J. Micromech. Microeng. 2014, 24. [Google Scholar] [CrossRef]
- Yang, C.; Liu, S.; Xie, X.; Livermore, C. Compact, planar, translational piezoelectric bimorph actuator with Archimedes’ spiral actuating tethers. J. Micromech. Microeng. 2016, 26. [Google Scholar] [CrossRef]
- Xie, X.; Livermore, C. Passively self-aligned assembly of compact barrel hinges for high-performance, out-of-plane mems actuators. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 813–816. [Google Scholar]
- Xie, X.; Livermore, C. A pivot-hinged, multilayer SU-8 micro motion amplifier assembled by a self-aligned approach. In Proceedings of the IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 75–78. [Google Scholar]
- Xie, X.; Livermore, C. A high-force, out-of-plane actuator with a MEMS-enabled microscissor motion amplifier. J. Phys. Conf. Ser. 2015, 660. [Google Scholar] [CrossRef]
- Yang, C.; Xie, X.; Liu, S.; Livermore, C. Resealable, ultra-low leak micro valve using liquid surface tension sealing for vacuum applications. In Proceedings of the 2017 19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017. [Google Scholar]
- Xie, X.; Zaitsev, Y.; Velasquez-Garcia, L.; Teller, S.; Livermore, C. Compact, scalable, high-resolution, MEMS-enabled tactile displays. In Proceedings of the Solid-State Sensors, Actuators, and Microsystems Workshop, Hilton Head Island, SC, USA, 8–12 June 2014; pp. 127–130. [Google Scholar]
- Xu, J.; Xie, X.; Yang, C.; Shen, Z. Test and Analysis of Hydraulic Fracture Characteristics of Rock Single Crack. Fluid Mech. Open Access 2017, 4. [Google Scholar] [CrossRef]
- Xie, X. High Performance Micro Actuators for Tactile Displays. In Ph.D. Thesis; Northeastern University: Boston, MA, USA; ProQuest Dissertations Publishing: Ann Arbor, MI, USA, 2017; ProQuest No. 10273384. [Google Scholar]
- Yoo, J.; Yun, S.; Lim, S.; Park, J.; Yun, K.; Lee, H. Position controlled pneumatic tactile display for tangential stimulation of a finger pad. Sens. Actuators A Phys. 2015, 229, 15–22. [Google Scholar] [CrossRef]
- Kim, Y.; Oakley, I.; Ryu, J. Design and Psychophysical Evaluation of Pneumatic Tactile Display. In Proceedings of the 2006 SICE-ICASE International Joint Conference, Busan, South Korea, 18–21 October 2006. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Receptors | Type (Depth) | Type (Adapting Speed) | Receptive Field | Frequency (Hz) | Sensing Property |
|---|---|---|---|---|---|
| Merkel’s discs | I | Slow | Small | 5–15 | Pressure, Texture |
| Ruffini endings | II | Slow | Large | 15–400 | Stretch |
| Meissner’s corpuscles | I | Fast | Small | 20–50 | Stroke, Fluttering |
| Pacinian corpuscles | II | Fast | Large | 60–400 | Vibration |
| Actuation Types | Feedback Effectiveness | System Complexity | Size | Power Consumption | Response Speed | Cost |
|---|---|---|---|---|---|---|
| Rotary Motor | Bad | Good | Bad | Marginal | Good | Good |
| LEA | Marginal | Good | Bad | Marginal | Good | Good |
| EAP | Good | Marginal | Good | Bad | Bad | Marginal |
| SMA | Good | Bad | Good | Bad | Bad | Marginal |
| Piezoelectric | Good | Marginal | Marginal | Good | Good | Bad |
| Pneumatic | Good | Bad | Bad | Bad | Marginal | Bad |
| CNT | Good | Marginal | Bad | Marginal | Bad | Bad |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, X.; Liu, S.; Yang, C.; Yang, Z.; Liu, T.; Xu, J.; Zhang, C.; Zhai, X. A Review of Smart Materials in Tactile Actuators for Information Delivery. C 2017, 3, 38. https://doi.org/10.3390/c3040038
Xie X, Liu S, Yang C, Yang Z, Liu T, Xu J, Zhang C, Zhai X. A Review of Smart Materials in Tactile Actuators for Information Delivery. C. 2017; 3(4):38. https://doi.org/10.3390/c3040038
Chicago/Turabian StyleXie, Xin, Sanwei Liu, Chenye Yang, Zhengyu Yang, Tian Liu, Juncai Xu, Cheng Zhang, and Xianglin Zhai. 2017. "A Review of Smart Materials in Tactile Actuators for Information Delivery" C 3, no. 4: 38. https://doi.org/10.3390/c3040038
APA StyleXie, X., Liu, S., Yang, C., Yang, Z., Liu, T., Xu, J., Zhang, C., & Zhai, X. (2017). A Review of Smart Materials in Tactile Actuators for Information Delivery. C, 3(4), 38. https://doi.org/10.3390/c3040038