



Estimating the Grape Basal Crop Coefficient in the Subhumid Region of Northwest China Based on Multispectral Remote Sensing by Unmanned Aerial Vehicle


Abstract
:1. Introduction
2. Materials and Methods
2.1. Overview of the Study Area and Grape Phenological Stages
2.2. Meteorological Data
2.3. The Bowen Ratio Energy Balance Method
2.4. The Dual Crop Coefficient Method
2.5. Multispectral Image Acquisition and Preprocessing
2.6. Vegetation Index Calculation
2.7. Model Verification Method
3. Results
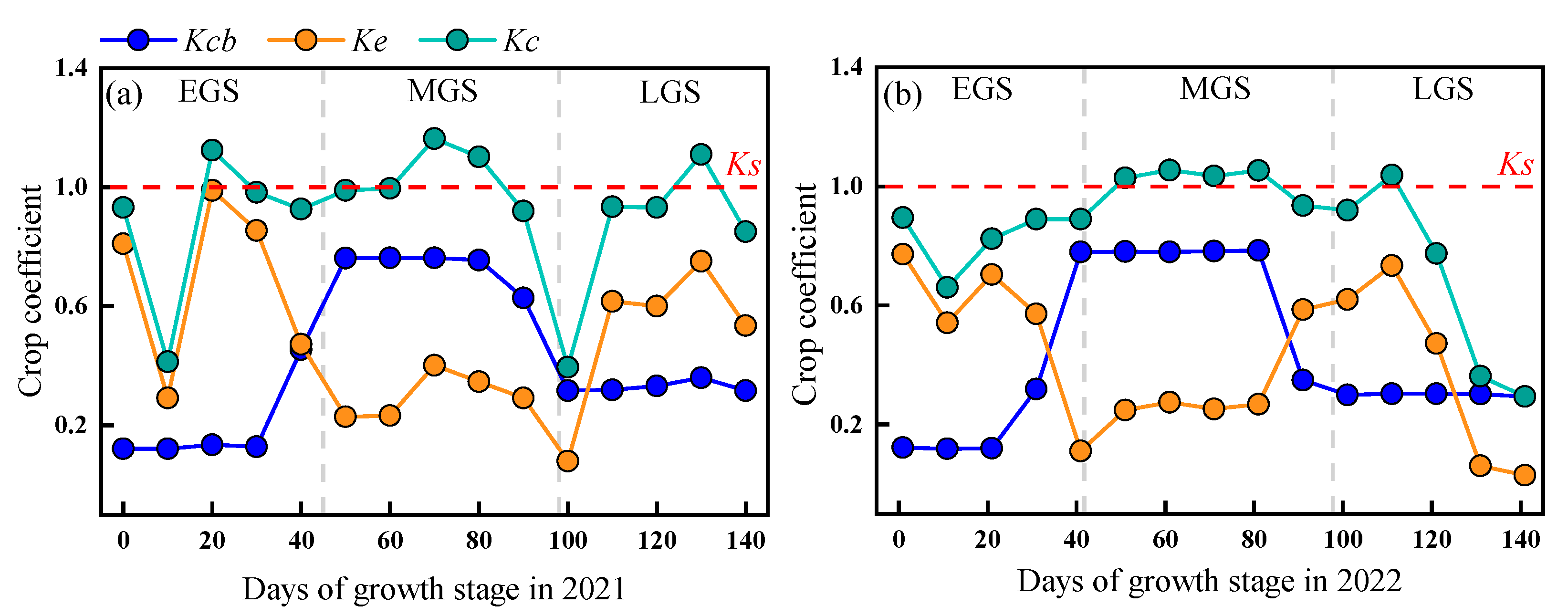
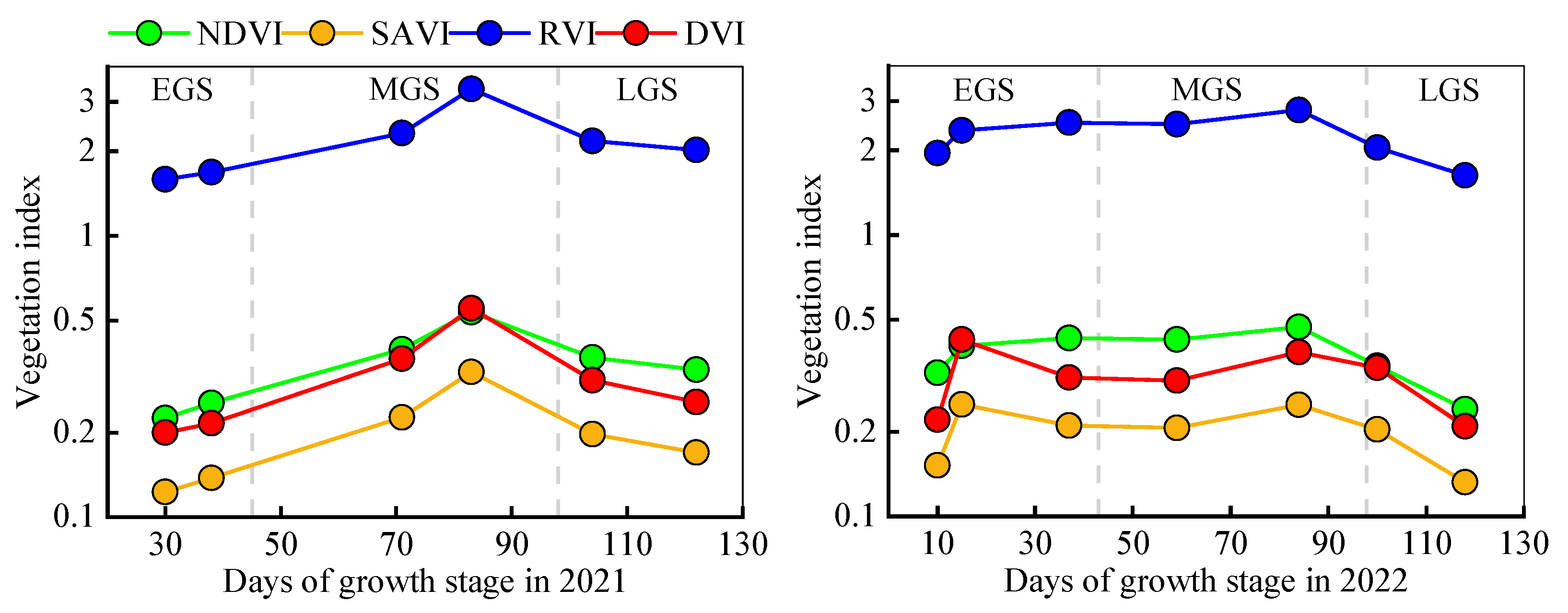
3.1. Grape Crop Coefficients and Vegetation Indices
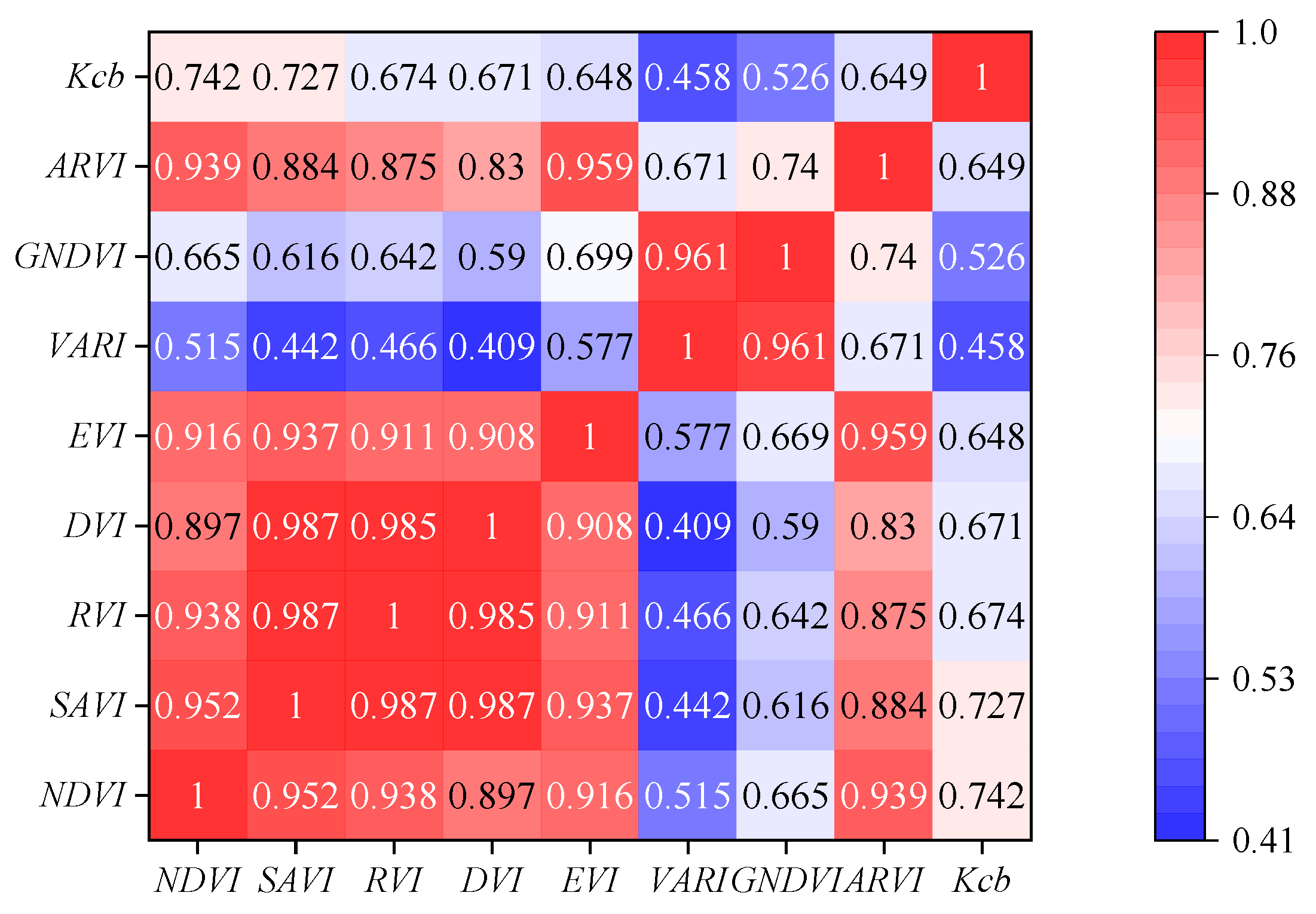
3.2. Relationship Model Between Grape Basal Crop Coefficient with Vegetation Indices
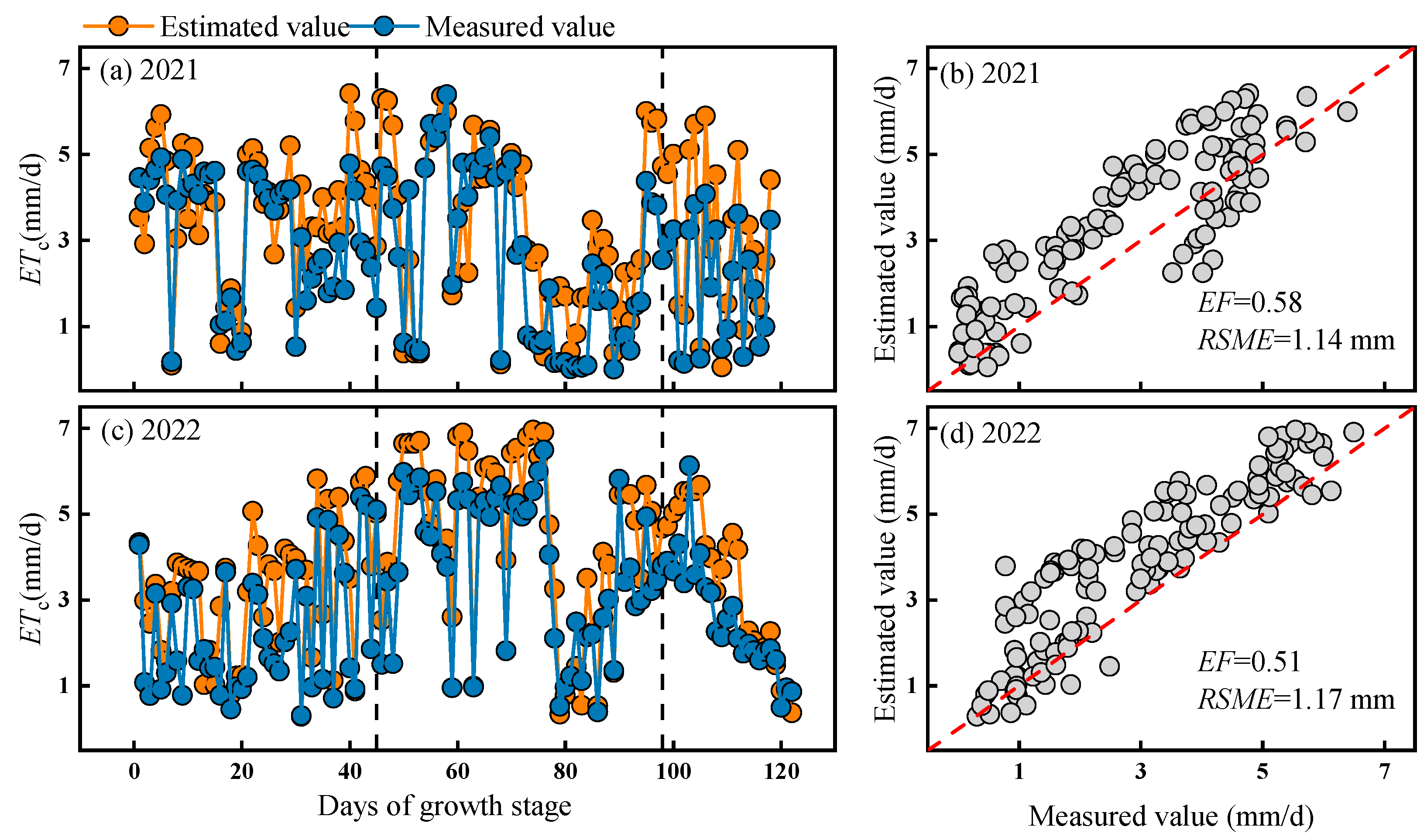
3.3. Verification of Evapotranspiration Model Estimation Accuracy
4. Discussion
4.1. Data Analysis Required for the Model
4.2. Factors Affecting the Fitting Accuracy of the Model Between Grape Basal Crop Coefficient with Vegetation Indices
4.2.1. The Growth Stage
4.2.2. Type of Vegetation Index
4.2.3. Modeling Method
4.3. Comparison of Evapotranspiration Models
- (1)
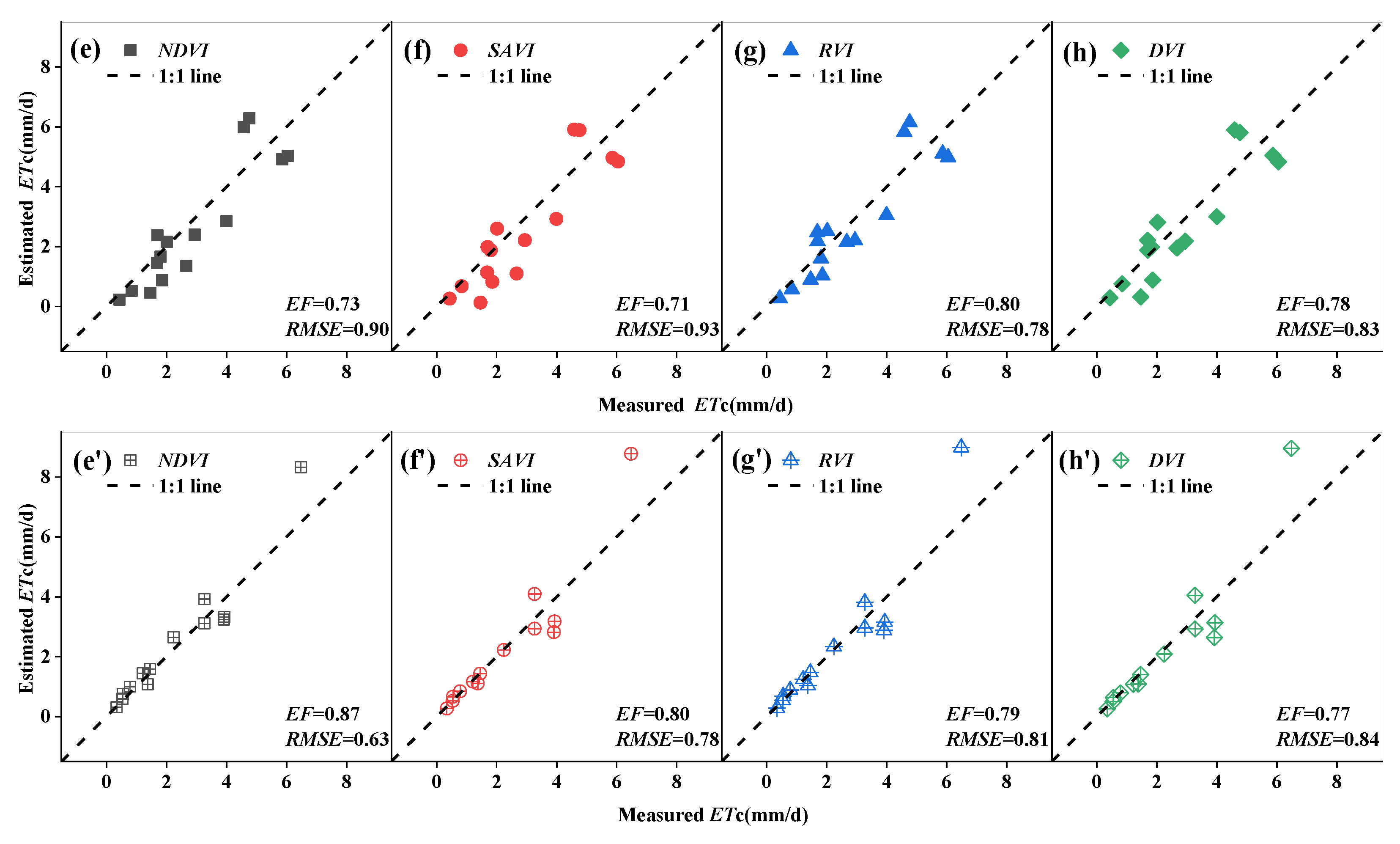
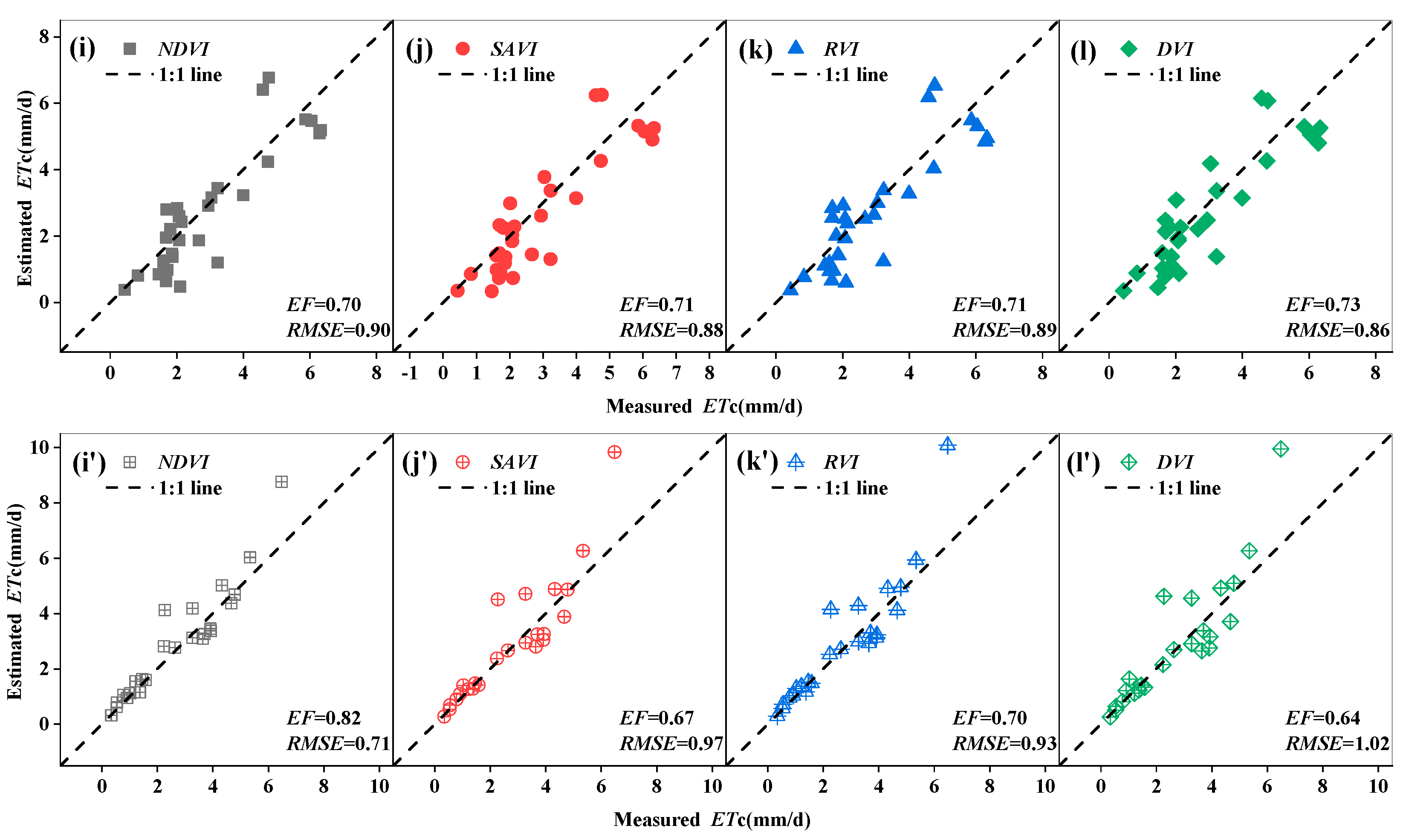
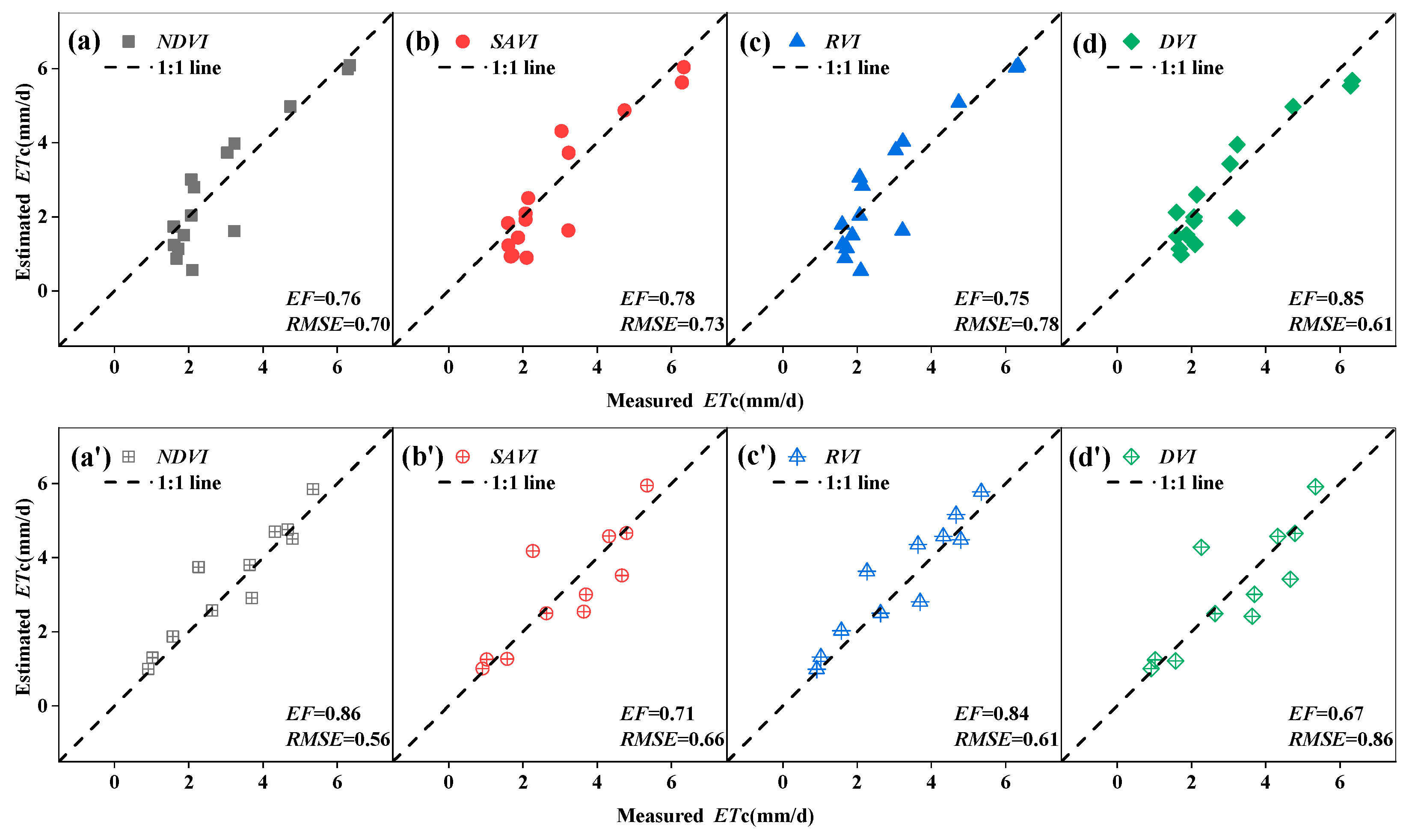
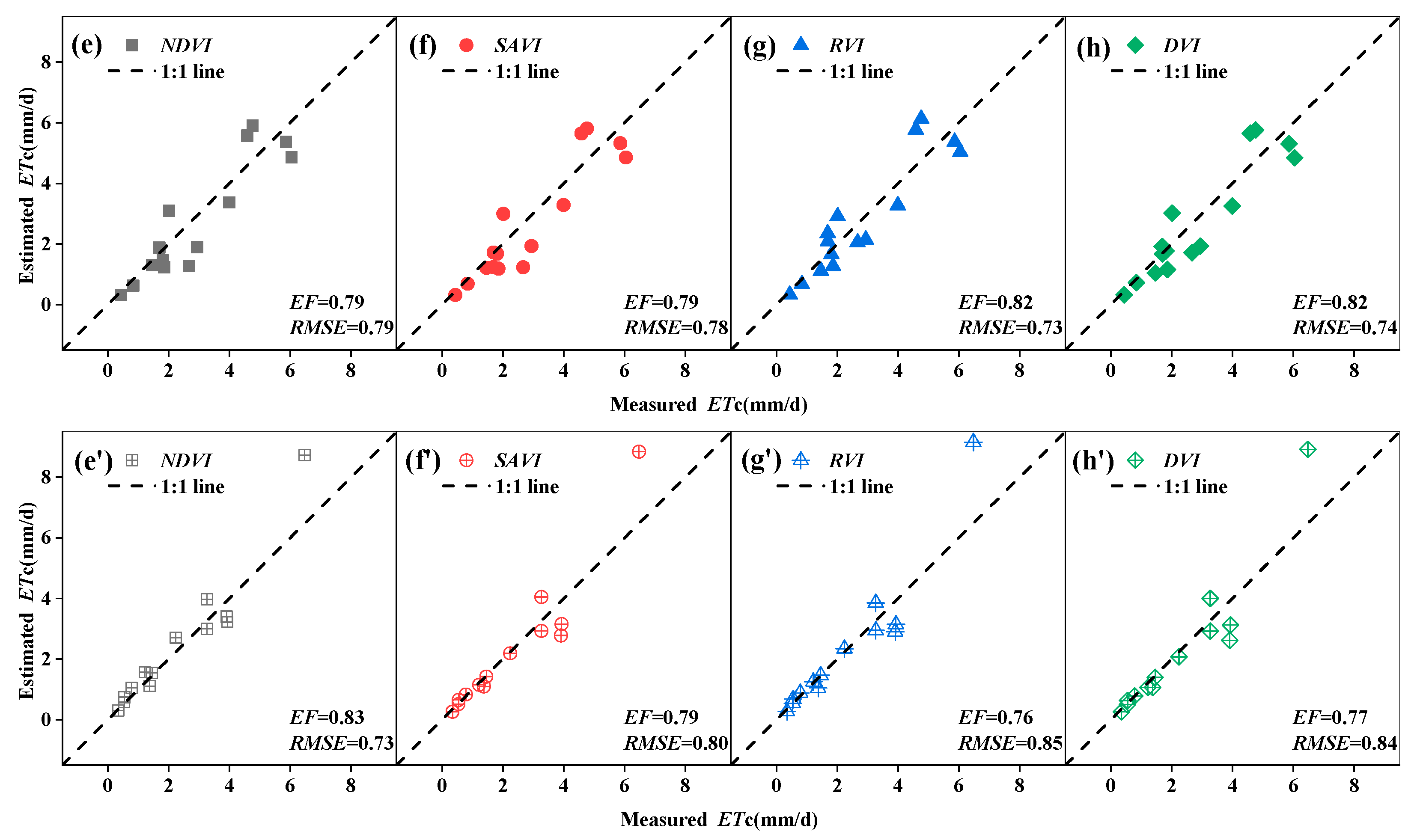
- Growth Stage: When comparing the verification accuracy of the four vegetation indices under different modeling methods in the early, late, and whole growth stages, it was observed that for most models in 2021 and 2022, the verification accuracy in the early and late growth stages was higher than that in the whole growth stage. This was because the grape growth period was relatively long, making it necessary to estimate evapotranspiration separately for each growth stage to ensure accuracy. Using the same fitting formula for the whole growth period would lead to a decrease in accuracy due to the mismatch between flight frequency and grape growth rate. The difference in verification accuracy of grape evapotranspiration in the early and late growth stages was mainly due to external factors such as weed growth and internal factors such as whether the vegetation indices reached saturation in the late growth stage.
- (2)
- Types of Vegetation Index: The four vegetation indices led to differences in verification accuracy due to varying model fitting accuracies. When the fitting accuracy of a vegetation index was high, the model verification accuracy also tended to improve. Under both univariate linear regression and polynomial regression modeling, the highest accuracy for estimating evapotranspiration using NDVI was 0.87, with an RMSE of 0.63 mm/d. In contrast, the DVI model had the poorest validation results, with an accuracy of only 0.64 and an RMSE of 1.02 mm/d. The larger RMSE may be due to the fact that larger errors, when squared, increase the gap between the estimated and actual values.
- (3)
- Modeling Methods: The same vegetation index under the same growth stage may have different model verification accuracies due to different modeling methods. In 2021 and 2022, the verification accuracies of the polynomial regression models were slightly higher than that of the univariate linear regression models. This indicated that when the verification accuracies of the univariate linear regression models were high, the polynomial regression model may improve the verification accuracy because non-linear fitting had a certain impact on improving model verification accuracy. However, it cannot significantly enhance the accuracy, as both modeling methods only consider a single factor. In contrast, the multiple linear regression model had the highest validation accuracy, suggesting that considering multiple vegetation indices comprehensively can improve the model verification accuracy.
4.4. Limitations and Future Research
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, C.-Y.; Singh, V.P. Evaluation of Three Complementary Relationship Evapotranspiration Models by Water Balance Approach to Estimate Actual Regional Evapotranspiration in Different Climatic Regions. J. Hydrol. 2005, 308, 105–121. [Google Scholar] [CrossRef]
- Ferreira, M.I.; Silvestre, J.; Conceição, N.; Malheiro, A.C. Crop and Stress Coefficients in Rainfed and Deficit Irrigation Vineyards Using Sap Flow Techniques. Irrig. Sci. 2012, 30, 433–447. [Google Scholar] [CrossRef]
- Cui, N.; He, Z.; Jiang, S.; Wang, M.; Yu, X.; Zhao, L.; Qiu, R.; Gong, D.; Wang, Y.; Feng, Y. Inter-Comparison of the Penman-Monteith Type Model in Modeling the Evapotranspiration and Its Components in an Orchard Plantation of Southwest China. Agric. Water Manag. 2023, 289, 108541. [Google Scholar] [CrossRef]
- Li, X.H.; Liu, H.J.; Wang, Y.; Wang, L.G.; Pei, X.Y.; Wu, Y.B.; Zheng, G.Q. Chinese grape Market and Industry survey analysis report. Agric. Prod. Mark. 2021, 18, 49–51. [Google Scholar]
- Wang, Q.L.; Zhao, Y.Y.; Guo, J.Q.; Wang, Y.W.; Zhang, X.Y.; Wang, X.P. Investigation on the introduction performance of eleven table grape varieties in Yan-gling, Shaanxi Province. Northwest Hortic. (Fruit Trees) 2021, 04, 46–49. [Google Scholar]
- Yu, Z.; Hu, X.; Ran, H.; Wang, X.; Wang, W.; He, X. Estimation of Evapotranspiration in Vine-yards of Semi-Humid Areas Based on the Bowen Ratio-Energy Balance Method. Agric. Res. Arid. Areas 2020, 38, 9. [Google Scholar] [CrossRef]
- Williams, D.G.; Cable, W.; Hultine, K.; Hoedjes, J.C.B.; Yepez, E.A.; Simonneaux, V.; Er-Raki, S.; Boulet, G.; De Bruin, H.A.R.; Chehbouni, A.; et al. Evapotranspiration Components Determined by Stable Isotope, Sap Flow and Eddy Covariance Techniques. Agric. For. Meteorol. 2004, 125, 241–258. [Google Scholar] [CrossRef]
- A Review of the Bowen Ratio Surface Energy Balance Method for Quantifying Evapotranspiration and Other Energy Fluxes. Trans. ASABE 2014, 1657–1674. [CrossRef]
- Ding, R.; Kang, S.; Li, F.; Zhang, Y.; Tong, L.; Sun, Q. Evaluating Eddy Covariance Method by Large-Scale Weighing Lysimeter in a Maize Field of Northwest China. Agric. Water Manag. 2010, 98, 87–95. [Google Scholar] [CrossRef]
- Ai, P.; Ma, Y. Estimation of Evapotranspiration of a Jujube/Cotton Intercropping System in an Arid Area Based on the Dual Crop Coefficient Method. Agriculture 2020, 10, 65. [Google Scholar] [CrossRef]
- Han, J.; Tian, L.; Cai, Z.; Ren, W.; Liu, W.; Li, J.; Tai, J. Season-Specific Evapotranspiration Partitioning Using Dual Water Isotopes in a Pinus Yunnanensis Ecosystem, Southwest China. J. Hydrol. 2022, 608, 127672. [Google Scholar] [CrossRef]
- Foken, T.; Aubinet, M.; Leuning, R. The Eddy Covariance Method. In Eddy Covariance; Aubinet, M., Vesala, T., Papale, D., Eds.; Springer Netherlands: Dordrecht, The Netherlands, 2012; pp. 1–19. ISBN 978-94-007-2350-4. [Google Scholar]
- Paço, T.A.; Ferreira, M.I.; Rosa, R.D.; Paredes, P.; Rodrigues, G.C.; Conceição, N.; Pacheco, C.A.; Pereira, L.S. The Dual Crop Coefficient Approach Using a Density Factor to Simulate the Evapotranspiration of a Peach Orchard: SIMDualKc Model versus Eddy Covariance Measurements. Irrig. Sci. 2012, 30, 115–126. [Google Scholar] [CrossRef]
- Phogat, V.; Šimůnek, J.; Skewes, M.A.; Cox, J.W.; McCarthy, M.G. Improving the Estimation of Evaporation by the FAO-56 Dual Crop Coefficient Approach under Subsurface Drip Irrigation. Agric. Water Manag. 2016, 178, 189–200. [Google Scholar] [CrossRef]
- Flumignan, D.L.; De Faria, R.T.; Prete, C.E.C. Evapotranspiration Components and Dual Crop Coefficients of Coffee Trees during Crop Production. Agric. Water Manag. 2011, 98, 791–800. [Google Scholar] [CrossRef]
- Santosh, D.T.; Tiwari, K.N. Estimation of Water Requirement of Banana Crop under Drip Irrigation with and without Plastic Mulch Using Dual Crop Coefficient Approach. IOP Conf. Ser. Earth Environ. Sci. 2019, 344, 012024. [Google Scholar] [CrossRef]
- Glenn, E.P.; Neale, C.M.U.; Hunsaker, D.J.; Nagler, P.L. Vegetation Index-based Crop Coefficients to Estimate Evapotranspiration by Remote Sensing in Agricultural and Natural Ecosystems. Hydrol. Process. 2011, 25, 4050–4062. [Google Scholar] [CrossRef]
- Hunsaker, D.J.; Pinter, P.J.; Barnes, E.M.; Kimball, B.A. Estimating Cotton Evapotranspiration Crop Coefficients with a Multispectral Vegetation Index. Irrig. Sci. 2003, 22, 95–104. [Google Scholar] [CrossRef]
- Sankaran, S.; Khot, L.R.; Carter, A.H. Field-Based Crop Phenotyping: Multispectral Aerial Imaging for Evaluation of Winter Wheat Emergence and Spring Stand. Comput. Electron. Agric. 2015, 118, 372–379. [Google Scholar] [CrossRef]
- Shi, Y.; Thomasson, J.A.; Murray, S.C.; Pugh, N.A.; Rooney, W.L.; Shafian, S.; Rajan, N.; Rouze, G.; Morgan, C.L.S.; Neely, H.L.; et al. Unmanned Aerial Vehicles for High-Throughput Phenotyping and Agronomic Research. PLoS ONE 2016, 11, e0159781. [Google Scholar] [CrossRef]
- Han, W.T.; Zhang, L.Y.; Niu, Y.X.; Shi, X. Research progress of UAV remote sensing technology in precision irrigation. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–14. [Google Scholar]
- Marcial-Pablo, M.D.J.; Ontiveros-Capurata, R.E.; Jiménez-Jiménez, S.I.; Ojeda-Bustamante, W. Maize Crop Coefficient Estimation Based on Spectral Vegetation Indices and Vegetation Cover Fraction Derived from UAV-Based Multispectral Images. Agronomy 2021, 11, 668. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, L.; Zhang, H.; Song, Z.; Lin, G.; Han, W. Study on Estimation Method of Corn Crop Coefficient Using UAV Remote Sensing in Conjunction with Ground Water Monitoring. Trans. Chin. Soc. Agric. Eng. 2019, 35, 7. [Google Scholar] [CrossRef]
- Han, W.T.; Shao, G.M.; Ma, D.J.; Wang, Y.; Niu, Y.X. Uav multi-spectral Remote sensing method for estimation of maize crop coefficient in field. Trans. Chin. Soc. Agric. Mach. 2018, 49, 134–143. [Google Scholar] [CrossRef]
- Shao, G.; Han, W.; Zhang, H.; Liu, S.; Wang, Y.; Zhang, L.; Cui, X. Mapping Maize Crop Coefficient Kc Using Random Forest Algorithm Based on Leaf Area Index and UAV-Based Multispectral Vegetation Indices. Agric. Water Manag. 2021, 252, 106906. [Google Scholar] [CrossRef]
- Gautam, D.; Ostendorf, B.; Pagay, V. Estimation of Grapevine Crop Coefficient Using a Multispectral Camera on an Unmanned Aerial Vehicle. Remote Sens. 2021, 13, 2639. [Google Scholar] [CrossRef]
- Wei, H.; Wang, J.; Li, M.; Wen, M.; Lu, Y. Assessing the Applicability of Mainstream Global Isoscapes for Predicting δ18O, δ2H, and d-Excess in Precipitation across China. Water 2023, 15, 3181. [Google Scholar] [CrossRef]
- Dicken, U.; Cohen, S.; Tanny, J. Examination of the Bowen Ratio Energy Balance Technique for Evapotranspiration Estimates in Screenhouses. Biosyst. Eng. 2013, 114, 397–405. [Google Scholar] [CrossRef]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotraspiration—Guidelines for Computing Crop Water Requirements—FAO Irrigation& Drainage; FAO: Roma, Italy, 1998; p. 56. [Google Scholar]
- Bannari, A.; Morin, D.; Bonn, F.; Huete, A.R. A Review of Vegetation Indices. Remote Sens. Rev. 1995, 13, 95–120. [Google Scholar] [CrossRef]
- Huete, A.R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Priebe, S.; Huxley, P.; Knight, S.; Evans, S. Application and Results of the Manchester Short Assessment of Quality of Life (Mansa). Int. J. Soc. Psychiatry 1999, 45, 7–12. [Google Scholar] [CrossRef] [PubMed]
- Richardson, A.J. Distinguishing Vegetation from Soil Background Information. Photogramm. Eng. Remote Sens. 1977, 43, 1541–1552. [Google Scholar]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the Radiometric and Biophysical Performance of the MODIS Vegetation Indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Schneider, P.; Roberts, D.A.; Kyriakidis, P.C. A VARI-Based Relative Greenness from MODIS Data for Computing the Fire Potential Index. Remote Sens. Environ. 2008, 112, 1151–1167. [Google Scholar] [CrossRef]
- Wang, F.; Huang, J.; Tang, Y.; Wang, X. New Vegetation Index and Its Application in Estimating Leaf Area Index of Rice. Rice Sci. 2007, 14, 195–203. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Tanre, D. Atmospherically Resistant Vegetation Index (ARVI) for EOS-MODIS. IEEE Trans. Geosci. Remote Sens. 1992, 30, 261–270. [Google Scholar] [CrossRef]
- Zheng, W.S.; Zhang, G.Z.; Zhang, Z.X.; Zheng, L. Modeling and evaluation of maize water production function in semi-arid region of western Heilongjiang Province. J. Northeast. Agric. Univ. 2011, 42, 61–65. [Google Scholar]
- Peng, X.; Chen, D.; Zhou, Z.; Zhang, Z.; Xu, C.; Zha, Q.; Wang, F.; Hu, X. Prediction of the Nitrogen, Phosphorus and Potassium Contents in Grape Leaves at Different Growth Stages Based on UAV Multispectral Remote Sensing. Remote Sens. 2022, 14, 2659. [Google Scholar] [CrossRef]
- Zhao, P.; Kang, S.; Li, S.; Ding, R.; Tong, L.; Du, T. Seasonal Variations in Vineyard ET Partitioning and Dual Crop Coefficients Correlate with Canopy Development and Surface Soil Moisture. Agric. Water Manag. 2018, 197, 19–33. [Google Scholar] [CrossRef]
- Ding, R.; Kang, S.; Zhang, Y.; Hao, X.; Tong, L.; Du, T. Partitioning Evapotranspiration into Soil Evaporation and Transpiration Using a Modified Dual Crop Coefficient Model in Irrigated Maize Field with Ground-Mulching. Agric. Water Manag. 2013, 127, 85–96. [Google Scholar] [CrossRef]
- Xia, T.; Kustas, W.P.; Anderson, M.C.; Alfieri, J.G.; Gao, F.; McKee, L.; Prueger, J.H.; Geli, H.M.E.; Neale, C.M.U.; Sanchez, L.; et al. Mapping Evapotranspiration with High-Resolution Aircraft Imagery over Vineyards Using One- and Two-Source Modeling Schemes. Hydrol. Earth Syst. Sci. 2016, 20, 1523–1545. [Google Scholar] [CrossRef]
- Li, H. Experiment and analysis of NDVI and RVI inversion results based on Landsat image. Geospat. Inf. 2021, 19, 75–77. [Google Scholar]
- Shao, G.; Wang, Y.; Han, W. Estimation Method of Leaf Area Index of Summer Corn Based on UAV Multi-spectral Remote Sensing. Smart Agric. 2020, 2, 11. [Google Scholar] [CrossRef]
- Jin, X.; Li, Z.; Feng, H.; Ren, Z.; Li, S. Deep Neural Network Algorithm for Estimating Maize Biomass Based on Simulated Sentinel 2A Vegetation Indices and Leaf Area Index. Crop J. 2020, 8, 87–97. [Google Scholar] [CrossRef]
- Alam, M.S.; Lamb, D.W.; Rahman, M.M. A Refined Method for Rapidly Determining the Relationship between Canopy NDVI and the Pasture Evapotranspiration Coefficient. Comput. Electron. Agric. 2018, 147, 12–17. [Google Scholar] [CrossRef]
- Zhang, L.; Han, W.; Niu, Y.; Chávez, J.L.; Shao, G.; Zhang, H. Evaluating the Sensitivity of Water Stressed Maize Chlorophyll and Structure Based on UAV Derived Vegetation Indices. Comput. Electron. Agric. 2021, 185, 106174. [Google Scholar] [CrossRef]
- Pôças, I.; Calera, A.; Campos, I.; Cunha, M. Remote Sensing for Estimating and Mapping Single and Basal Crop Coefficientes: A Review on Spectral Vegetation Indices Approaches. Agric. Water Manag. 2020, 233, 106081. [Google Scholar] [CrossRef]
- Hassan, M.A.; Yang, M.; Rasheed, A.; Jin, X.; Xia, X.; Xiao, Y.; He, Z. Time-Series Multispectral Indices from Unmanned Aerial Vehicle Imagery Reveal Senescence Rate in Bread Wheat. Remote Sens. 2018, 10, 809. [Google Scholar] [CrossRef]
- Kamble, B.; Kilic, A.; Hubbard, K. Estimating Crop Coefficients Using Remote Sensing-Based Vegetation Index. Remote Sens. 2013, 5, 1588–1602. [Google Scholar] [CrossRef]
- Fan, J.; Zheng, J.; Wu, L.; Zhang, F. Estimation of Daily Maize Transpiration Using Support Vector Machines, Extreme Gradient Boosting, Artificial and Deep Neural Networks Models. Agric. Water Manag. 2021, 245, 106547. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Growth Stage | Date of Grape Growth Stage Partition | |
|---|---|---|
| 2021 | 2022 | |
| New shoot growth stage | 4/12–5/15 | 4/8–5/12 |
| Flowering stage | 5/16–5/30 | 5/13–5/28 |
| Fruit expansion stage | 5/31–7/6 | 5/29–7/5 |
| Coloring maturity stage | 7/7–8/20 | 7/6–8/20 |
| Vegetation Index | Computational Formula | Reference |
|---|---|---|
| NDVI | [30] | |
| SAVI | [31] | |
| RVI | [32] | |
| DVI | [33] | |
| EVI | [34] | |
| VARI | [35] | |
| GNDVI | [36] | |
| ARVI | [37] |
| Growth Stage | X | 2021 | 2022 | ||||
|---|---|---|---|---|---|---|---|
| Expression | R2 | P | Expression | R2 | P | ||
| Early growth stage | NDVI | y = 3.12x − 0.58 | 0.82 | <0.001 | y = 0.88x − 0.03 | 0.82 | <0.001 |
| SAVI | y = 4.58x − 0.41 | 0.75 | <0.01 | y = 1.49x + 0.02 | 0.82 | <0.001 | |
| RVI | y = 0.70x − 0.98 | 0.80 | <0.001 | y = 0.15x − 0.03 | 0.74 | <0.01 | |
| DVI | y = 2.42x − 0.30 | 0.65 | <0.01 | y = 0.82x + 0.06 | 0.75 | <0.01 | |
| Late growth stage | NDVI | y = 2.52x − 0.59 | 0.71 | <0.01 | y = 1.06x − 0.03 | 0.73 | <0.01 |
| SAVI | y = 3.38x − 0.34 | 0.74 | <0.01 | y = 1.12x + 0.15 | 0.76 | <0.01 | |
| RVI | y = 0.40x − 0.55 | 0.75 | <0.01 | y = 0.12x + 0.09 | 0.80 | <0.001 | |
| DVI | y = 1.82x − 0.23 | 0.75 | <0.01 | y = 0.46x + 0.24 | 0.75 | <0.01 | |
| Growth Stage | X | 2021 | 2022 | ||||
|---|---|---|---|---|---|---|---|
| Expression | R2 | P | Expression | R2 | P | ||
| Early growth stage | NDVI | y = −3.74x2 + 5.48x − 0.93 | 0.83 | <0.001 | y = 4.21x2 − 1.53x + 0.28 | 0.89 | <0.001 |
| SAVI | y = 38.98x2 − 8.64x + 0.58 | 0.75 | <0.01 | y = −2.69x2 + 2.33x − 0.04 | 0.83 | <0.001 | |
| RVI | y = 0.31x2 − 0.46x + 0.06 | 0.83 | <0.001 | y = 0.18x2 − 0.47x + 0.44 | 0.87 | <0.001 | |
| DVI | y = 3.41x2 + 0.61x − 0.1 | 0.68 | <0.01 | y = −2.12x2 + 1.93x − 0.07 | 0.82 | <0.001 | |
| Late growth stage | NDVI | y = 9.36x2 − 5.52x + 1.04 | 0.77 | <0.01 | y = 1.3x2 − 0.12x + 0.21 | 0.77 | <0.01 |
| SAVI | y = 12.51x2 − 2.86x + 0.37 | 0.77 | <0.01 | y = 0.46x2 + 0.78x + 0.2 | 0.76 | <0.01 | |
| RVI | y = 0.11x2 − 0.18x + 0.19 | 0.76 | <0.01 | y = 0.001x2 + 0.12x + 0.08 | 0.80 | <0.001 | |
| DVI | y = 3.06x2 − 0.69x + 0.22 | 0.76 | <0.01 | y = 0.02x2 + 0.42x + 0.25 | 0.75 | <0.01 | |
| Growth Stage | 2021 | 2022 | ||||||
|---|---|---|---|---|---|---|---|---|
| Model | R2 | P | n | Model | R2 | P | n | |
| Early growth stage | y = 0.23 + 3.70x1 + 24.60x2 − 1.31x3 − 9.7x4 | 0.86 | <0.001 | 15 | y = 0.04 − 185.84x1 + 1185.92x2 + 0.42x3 − 545.67x4 | 0.96 | <0.001 | 11 |
| Late growth stage | y = −0.5 − 20.40x1 + 75.27x2 + 1.21x3 − 29.78x4 | 0.78 | <0.01 | 15 | y = −0.07 + 4.52x1 − 12.22x2 + 0.01x3 + 3.73x4 | 0.89 | <0.001 | 13 |
| Whole growth stage | y = −0.20 − 6.08x1 + 33.57x2 − 0.10x3 − 11.57x4 | 0.71 | <0.01 | 30 | y = −0.03 + 2.64x1 − 6.28x2 − 0.04x3 + 2.24x4 | 0.84 | <0.001 | 24 |
| Growth Stage | The Multiple Linear Regression Models | |||
|---|---|---|---|---|
| 2021 | 2022 | |||
| EF | RMSE/mm | EF | RMSE/mm | |
| Early growth stage | 0.81 | 0.69 | 0.77 | 0.69 |
| Late growth stage | 0.80 | 0.82 | 0.73 | 0.90 |
| Whole growth stage | 0.74 | 0.86 | 0.81 | 0.73 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, C.; Hu, X.; Tian, J.; Guo, X.; Lei, J. Estimating the Grape Basal Crop Coefficient in the Subhumid Region of Northwest China Based on Multispectral Remote Sensing by Unmanned Aerial Vehicle. Horticulturae 2025, 11, 217. https://doi.org/10.3390/horticulturae11020217
Xu C, Hu X, Tian J, Guo X, Lei J. Estimating the Grape Basal Crop Coefficient in the Subhumid Region of Northwest China Based on Multispectral Remote Sensing by Unmanned Aerial Vehicle. Horticulturae. 2025; 11(2):217. https://doi.org/10.3390/horticulturae11020217
Chicago/Turabian StyleXu, Can, Xiaotao Hu, Jia Tian, Xuxin Guo, and Jichu Lei. 2025. "Estimating the Grape Basal Crop Coefficient in the Subhumid Region of Northwest China Based on Multispectral Remote Sensing by Unmanned Aerial Vehicle" Horticulturae 11, no. 2: 217. https://doi.org/10.3390/horticulturae11020217
APA StyleXu, C., Hu, X., Tian, J., Guo, X., & Lei, J. (2025). Estimating the Grape Basal Crop Coefficient in the Subhumid Region of Northwest China Based on Multispectral Remote Sensing by Unmanned Aerial Vehicle. Horticulturae, 11(2), 217. https://doi.org/10.3390/horticulturae11020217