
A Semantic Hybrid Temporal Approach for Detecting Driver Mental Fatigue



Abstract
:1. Introduction
- To the best of the authors’ knowledge, this study marks the inaugural effort in concentrating on the identification of the driver’s temporal patterns of mental fatigue state through a hybrid approach integrating body posture and vehicle information.
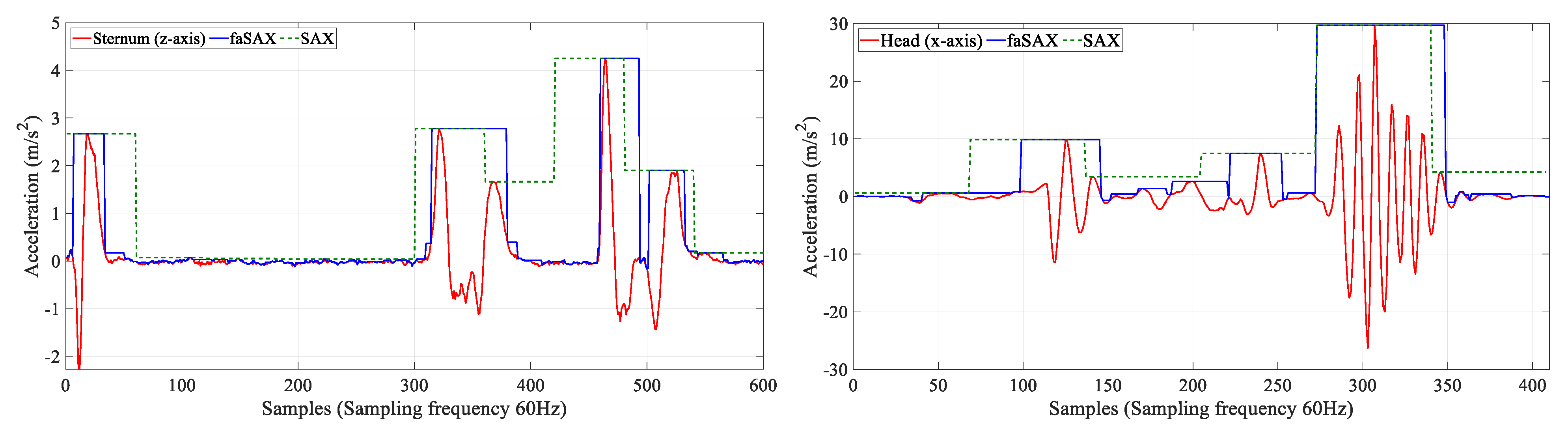
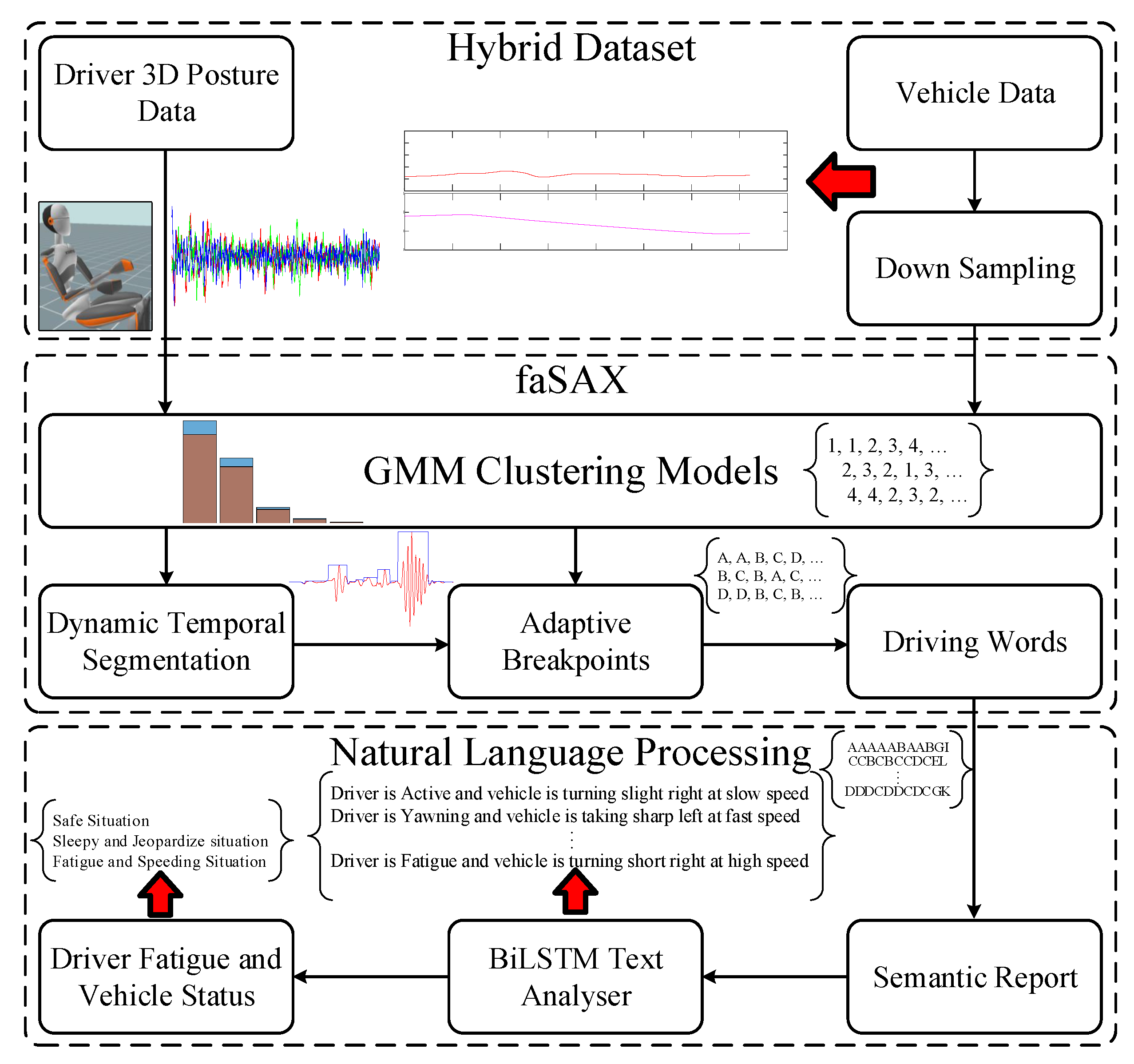
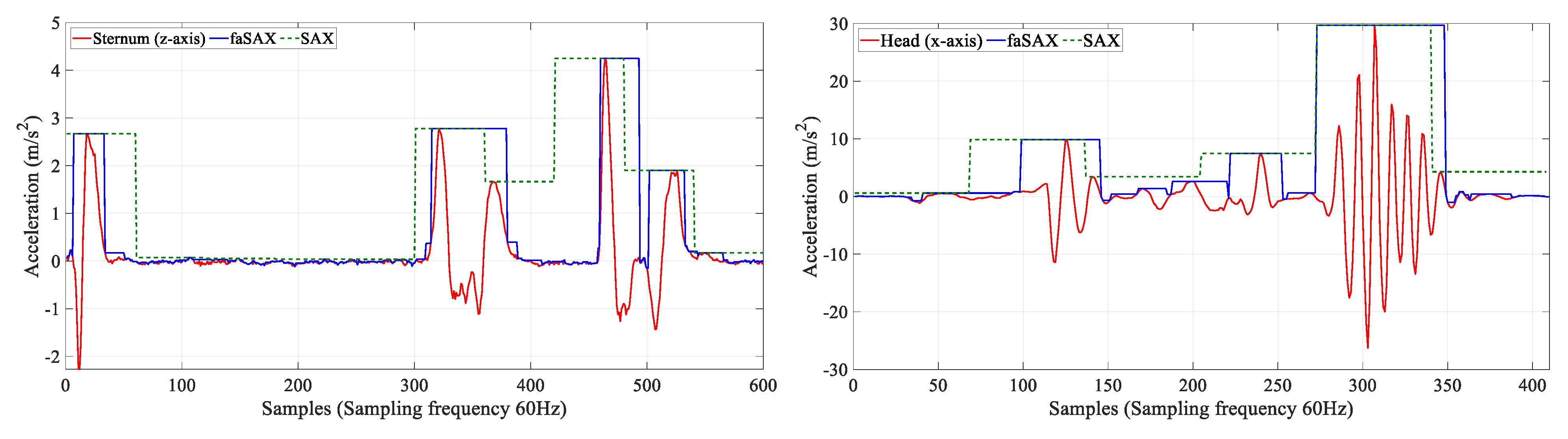
- Introducing a novel fully adaptive temporal segmentation algorithm named faSAX, this method is designed to identify time-variant fatigue patterns. faSAX assigns symbols by comparing the approximated value of segmented hybrid data with adaptively estimated breakpoints (thresholds).
- This work represents a significant stride in advancing the monitoring of linguistic-based temporal driver states and vehicle situations. It lays the groundwork for leveraging semiotic driving patterns to enhance the precision of shared-access control systems.
- In this study, the symbols extracted from the proposed algorithm can be utilized to generate diverse semantic reports on the driver and vehicle status. These reports can then undergo further analysis by natural language processing schemes to facilitate the identification of potential driver and vehicle situations.
- Highlighted by the experimental results, the proposed hybrid approach surpasses previous methodologies by precisely identifying time-variant fatigue and drowsiness patterns.
2. Background and Related Work
3. Methodology
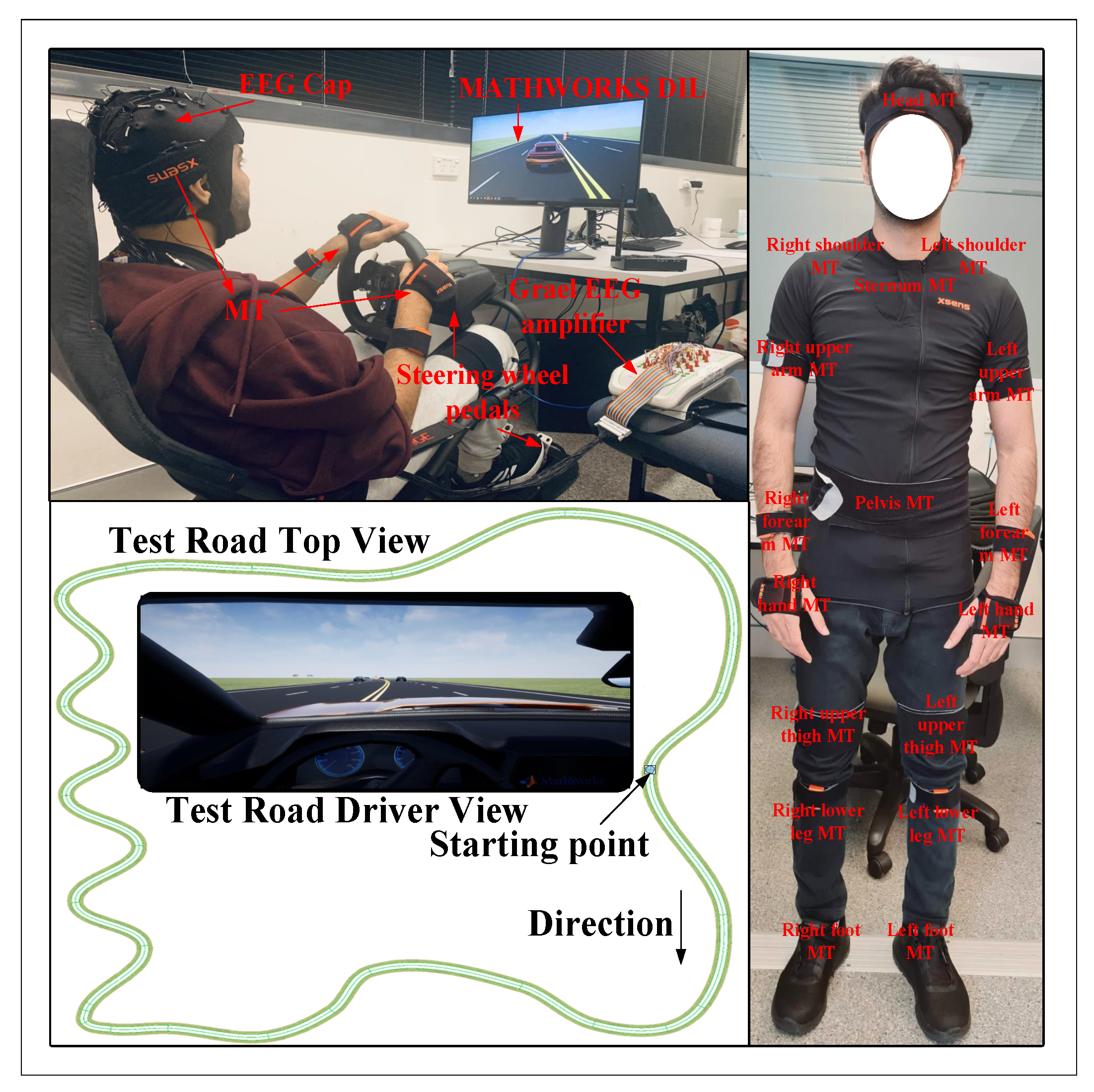
3.1. Experimental Platform and Protocol
3.2. Data Collection and Preprocessing
3.3. faSAX
| Algorithm 1: Dynamic time-series segmentation and PAA |
 |
| Algorithm 2: Dynamic breakpoints’ determination |
Input: Input: Input: [23]  |
3.4. BiLSTM Text Analyzer
| Algorithm 3: BiLSTM text analyzer network training and testing |
|
4. Results and Discussion
4.1. Driver Posture and Vehicle Situation
4.2. Dynamic Temporal Segmentation and Approximation
4.3. Adaptive Breakpoints’ Estimation and Symbol Assignment
4.4. Validation Using EEG
4.5. NLP
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Martinez, C.M.; Heucke, M.; Wang, F.Y.; Gao, B.; Cao, D. Driving style recognition for intelligent vehicle control and advanced driver assistance: A survey. IEEE Trans. Intell. Transp. Syst. 2017, 19, 666–676. [Google Scholar] [CrossRef]
- Ansari, S.; Du, H.; Naghdy, F.; Stirling, D. Factors Influencing Driver Behavior and Advances in Monitoring Methods. In AI-Enabled Technologies for Autonomous and Connected Vehicles; Springer: Berlin/Heidelberg, Germany, 2023; pp. 387–414. [Google Scholar]
- Distefano, N.; Leonardi, S.; Pulvirenti, G.; Romano, R.; Boer, E.; Wooldridge, E. Mining of the association rules between driver electrodermal activity and speed variation in different road intersections. IATSS Res. 2022, 46, 200–213. [Google Scholar] [CrossRef]
- NSW Government, Australia NSW Interactive Crash Statistics. 2021. Available online: https://roadsafety.transport.nsw.gov.au/statistics/interactivecrashstats/index.html (accessed on 18 May 2021).
- May, J.F.; Baldwin, C.L. Driver fatigue: The importance of identifying causal factors of fatigue when considering detection and countermeasure technologies. Transp. Res. Part Traffic Psychol. Behav. 2009, 12, 218–224. [Google Scholar] [CrossRef]
- Němcová, A.; Svozilová, V.; Bucsuházy, K.; Smíšek, R.; Mézl, M.; Hesko, B.; Belák, M.; Bilík, M.; Maxera, P.; Seitl, M.; et al. Multimodal features for detection of driver stress and fatigue. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3214–3233. [Google Scholar] [CrossRef]
- Choi, M.; Koo, G.; Seo, M.; Kim, S.W. Wearable device-based system to monitor a driver’s stress, fatigue, and drowsiness. IEEE Trans. Instrum. Meas. 2017, 67, 634–645. [Google Scholar] [CrossRef]
- Sikander, G.; Anwar, S. Driver fatigue detection systems: A review. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2339–2352. [Google Scholar] [CrossRef]
- Distefano, N.; Leonardi, S.; Pulvirenti, G.; Romano, R.; Merat, N.; Boer, E.; Woolridge, E. Physiological and driving behaviour changes associated to different road intersections. Eur. Transp. 2020, 77, 4. [Google Scholar] [CrossRef]
- Yang, Y.; Gao, Z.; Li, Y.; Cai, Q.; Marwan, N.; Kurths, J. A complex network-based broad learning system for detecting driver fatigue from EEG signals. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 5800–5808. [Google Scholar] [CrossRef]
- Wang, L.; Li, J.; Wang, Y. Modeling and recognition of driving fatigue state based on RR intervals of ECG data. IEEE Access 2019, 7, 175584–175593. [Google Scholar] [CrossRef]
- Foy, H.J.; Chapman, P. Mental workload is reflected in driver behaviour, physiology, eye movements and prefrontal cortex activation. Appl. Ergon. 2018, 73, 90–99. [Google Scholar] [CrossRef]
- Savaş, B.K.; Becerikli, Y. Real time driver fatigue detection system based on multi-task ConNN. IEEE Access 2020, 8, 12491–12498. [Google Scholar] [CrossRef]
- Ed-Doughmi, Y.; Idrissi, N.; Hbali, Y. Real-time system for driver fatigue detection based on a recurrent neuronal network. J. Imaging 2020, 6, 8. [Google Scholar] [CrossRef]
- Liu, Z.; Peng, Y.; Hu, W. Driver fatigue detection based on deeply-learned facial expression representation. J. Vis. Commun. Image Represent. 2020, 71, 102723. [Google Scholar] [CrossRef]
- Ponnan, S.; Theivadas, J.R.; HemaKumar, V.; Einarson, D. Driver monitoring and passenger interaction system using wearable device in intelligent vehicle. Comput. Electr. Eng. 2022, 103, 108323. [Google Scholar] [CrossRef]
- Yang, C.; Wang, X.; Mao, S. Unsupervised drowsy driving detection with RFID. IEEE Trans. Veh. Technol. 2020, 69, 8151–8163. [Google Scholar] [CrossRef]
- Hoshu, A.A.; Wang, L.; Sattar, A.; Fisher, A. Auto-Tuning of Attitude Control System for Heterogeneous Multirotor UAS. Remote Sens. 2022, 14, 1540. [Google Scholar] [CrossRef]
- Hoshu, A.A.; Fisher, A.; Wang, L. Cascaded Attitude Control For Heterogeneous Multirotor UAS For Enhanced Disturbance Rejection. In Proceedings of the 2019 Australian and New Zealand Control Conference (ANZCC), Auckland, New Zealand, 27–29 November 2019; pp. 110–115. [Google Scholar]
- Yi, D.; Su, J.; Liu, C.; Chen, W.H. Personalized driver workload inference by learning from vehicle related measurements. IEEE Trans. Syst. Man Cybern. Syst. 2017, 49, 159–168. [Google Scholar] [CrossRef]
- Hoshu, A.A.; Wang, L.; Ansari, S.; Sattar, A.; Bilal, M.H.A. System Identification of Heterogeneous Multirotor Unmanned Aerial Vehicle. Drones 2022, 6, 309. [Google Scholar] [CrossRef]
- Ansari, S.; Naghdy, F.; Du, H.; Pahnwar, Y.N. Driver Mental Fatigue Detection Based on Head Posture Using New Modified reLU-BiLSTM Deep Neural Network. IEEE Trans. Intell. Transp. Syst. 2021, 23, 10957–10969. [Google Scholar] [CrossRef]
- Ansari, S.; Du, H.; Naghdy, F.; Stirling, D. Automatic Driver Cognitive Fatigue Detection based on Upper Body Posture Variations. Expert Syst. Appl. 2022, 203, 117568. [Google Scholar] [CrossRef]
- Min, J.; Xiong, C.; Zhang, Y.; Cai, M. Driver fatigue detection based on prefrontal EEG using multi-entropy measures and hybrid model. Biomed. Signal Process. Control 2021, 69, 102857. [Google Scholar] [CrossRef]
- Athira, B.; Jones, J.; Idicula, S.M.; Kulanthaivel, A.; Zhang, E. Annotating and detecting topics in social media forum and modelling the annotation to derive directions-a case study. J. Big Data 2021, 8, 41. [Google Scholar] [CrossRef]
- Ansari, S.; Du, H.; Naghdy, F.; Stirling, D. Application of Fully Adaptive Symbolic Representation to Driver Mental Fatigue Detection Based on Body Posture. In Proceedings of the 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), IEEE, Melbourne, Australia, 17–20 October 2021. [Google Scholar]
- Sheykhivand, S.; Rezaii, T.Y.; Mousavi, Z.; Meshgini, S.; Makouei, S.; Farzamnia, A.; Danishvar, S.; Teo Tze Kin, K. Automatic Detection of Driver Fatigue Based on EEG Signals Using a Developed Deep Neural Network. Electronics 2022, 11, 2169. [Google Scholar] [CrossRef]
- Subasi, A.; Saikia, A.; Bagedo, K.; Singh, A.; Hazarika, A. EEG Based Driver Fatigue Detection Using FAWT and Multiboosting approaches. IEEE Trans. Ind. Inform. 2022, 18, 6602–6609. [Google Scholar] [CrossRef]
- Sikander, G.; Anwar, S. A novel machine vision-based 3D facial action unit identification for fatigue detection. IEEE Trans. Intell. Transp. Syst. 2020, 22, 2730–2740. [Google Scholar] [CrossRef]
- Reeder, B.; David, A. Health at hand: A systematic review of smart watch uses for health and wellness. J. Biomed. Inform. 2016, 63, 269–276. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.; Chu, D.; Wu, C.; Liu, S.; Sun, C.; Liu, T.; Cao, D. A Probabilistic Model for Driving-Style-Recognition-Enabled Driver Steering Behaviors. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1838–1851. [Google Scholar] [CrossRef]
- Hoshu, A.A.; Wang, L.; Fisher, A.; Sattar, A. Cascade control for heterogeneous multirotor UAS. Int. J. Intell. Unmanned Syst. 2022, 10(4), 363–384. [Google Scholar] [CrossRef]
- Du, G.; Li, T.; Li, C.; Liu, P.X.; Li, D. Vision-based fatigue driving recognition method integrating heart rate and facial features. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3089–3100. [Google Scholar] [CrossRef]
- Karuppusamy, N.S.; Kang, B.Y. Multimodal System to Detect Driver Fatigue Using EEG, Gyroscope, and Image Processing. IEEE Access 2020, 8, 129645–129667. [Google Scholar] [CrossRef]
- Taniguchi, T.; Nagasaka, S.; Hitomi, K.; Chandrasiri, N.P.; Bando, T.; Takenaka, K. Sequence prediction of driving behavior using double articulation analyzer. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 1300–1313. [Google Scholar] [CrossRef]
- Lin, J.; Keogh, E.; Lonardi, S.; Chiu, B. A symbolic representation of time series, with implications for streaming algorithms. In Proceedings of the 8th ACM SIGMOD Workshop on Research Issues in Data Mining and Knowledge Discovery, San Diego, CA, USA, 13 June 2003; pp. 2–11. [Google Scholar]
- Lin, J.; Keogh, E.; Wei, L.; Lonardi, S. Experiencing SAX: A novel symbolic representation of time series. Data Min. Knowl. Discov. 2007, 15, 107–144. [Google Scholar] [CrossRef]
- Sun, C.; Stirling, D.; Ritz, C.; Sammut, C. Variance-wise segmentation for a temporal-adaptive SAX. In Proceedings of the Tenth Australasian Data Mining Conference, Sydney, Australia, 5–7 December 2012; Volume 134, pp. 71–77. [Google Scholar]
- Pham, N.D.; Le, Q.L.; Dang, T.K. Two novel adaptive symbolic representations for similarity search in time series databases. In Proceedings of the 2010 12th International Asia-Pacific Web Conference, IEEE, Busan, Republic of Korea, 6–8 April 2010; pp. 181–187. [Google Scholar]
- Xu, D.; Tian, Y. A comprehensive survey of clustering algorithms. Ann. Data Sci. 2015, 2, 165–193. [Google Scholar] [CrossRef]
- Arakawa, T.; Hibi, R.; Fujishiro, T.a. Psychophysical assessment of a driver’s mental state in autonomous vehicles. Transp. Res. Part Policy Pract. 2019, 124, 587–610. [Google Scholar] [CrossRef]
- Martiniuk, A.L.; Senserrick, T.; Lo, S.; Williamson, A.; Du, W.; Grunstein, R.R.; Woodward, M.; Glozier, N.; Stevenson, M.; Norton, R.; et al. Sleep-deprived young drivers and the risk for crash: The DRIVE prospective cohort study. JAMA Pediatr. 2013, 167, 647–655. [Google Scholar] [CrossRef]
- Pack, A.I.; Pack, A.M.; Rodgman, E.; Cucchiara, A.; Dinges, D.F.; Schwab, C.W. Characteristics of crashes attributed to the driver having fallen asleep. Accid. Anal. Prev. 1995, 27, 769–775. [Google Scholar] [CrossRef]
- Song, W.; Woon, F.L.; Doong, A.; Persad, C.; Tijerina, L.; Pandit, P.; Cline, C.; Giordani, B. Fatigue in younger and older drivers: Effectiveness of an alertness-maintaining task. Hum. Factors 2017, 59, 995–1008. [Google Scholar] [CrossRef]
- Zhang, N.; Fard, M.; Bhuiyan, M.; Verhagen, D.; Azari, M.; Robinson, S. The effects of physical vibration on heart rate variability as a measure of drowsiness. Ergonomics 2018, 61, 1259–1272. [Google Scholar] [CrossRef]
- Zhang, Z. Improved adam optimizer for deep neural networks. In Proceedings of the 2018 IEEE/ACM 26th International Symposium on Quality of Service (IWQoS), IEEE, Banff, AB, Canada, 4–6 June 2018; pp. 1–2. [Google Scholar]
- Lyu, Z.; Qi, C.; Zhu, S.; Wang, H. The Visual Scanning Behavior and Mental Workload of Drivers at Prairie Highway Intersections With Different Characteristics. IEEE Access 2022, 10, 123043–123056. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | aSAX Dependent upon k-Means Method at [39] | Presented faSAX at | ||||
|---|---|---|---|---|---|---|
| Head (x-axis) | 0.009 | 0.2286 | 0.526 | 0.0686 | 0.2619 | 3.074 |
| Head (y-axis) | 0.1047 | 0.896 | 1.043 | 0.0783 | 0.2873 | 6.9518 |
| Head (z-axis) | 0.0083 | 0.2574 | 0.7527 | 0.055 | 0.1842 | 1.8964 |
| Neck (x-axis) | 0.0088 | 0.1693 | 0.83 | 0.0505 | 0.1326 | 1.6198 |
| Neck (y-axis) | 0.0223 | 0.2359 | 1.0817 | 0.0477 | 0.1713 | 2.292 |
| Neck (z-axis) | 0.009 | 0.1643 | 0.857 | 0.0463 | 0.16 | 1.6797 |
| Sternum (x-axis) | 0.0153 | 0.2576 | 0.9838 | 0.0679 | 0.2049 | 1.9579 |
| Sternum (y-axis) | 0.0257 | 0.3126 | 0.9076 | 0.0695 | 0.2537 | 2.9388 |
| Sternum (z-axis) | 0.011 | 0.2309 | 0.538 | 0.066 | 0.2151 | 1.0594 |
| RWA (degrees) | −0.56 | 0.012 | 0.078 | −2.56 | 0.0441 | 2.0904 |
| Speed (kmph) | 2.0569 | 4.0257 | 15.3604 | 20.56 | 71.29 | 87.36 |
| Number | faSAX Symbols | Description |
|---|---|---|
| 1 | A | Low acceleration (variation) in either head/neck/sternum postures (focused on road, relaxed). |
| 2 | B | Medium variations in body posture (head inclination, looking for surrounding). |
| 3 | C | High variations (yawning, high breathing rate). |
| 4 | D | Severe variations (nodding, head shaking, high breathing due to sleep). |
| 5 | E | Sharp left turn (Vehicle front wheel steering angle). |
| 6 | F | Slight left maneuver. |
| 7 | G | Slight right maneuver. |
| 8 | H | Sharp right maneuver/turn. |
| 9 | I | Slow speed (<20 kmph). |
| 10 | J | Moderate speed. |
| 11 | K | High speed. |
| 12 | L | Very high speed. |
| faSAX Words | Reports | Situation Awareness Classes |
|---|---|---|
| AAAAABAABGI | Driver is active, and vehicle is turning slight right at slow speed | Safe Situation |
| AABCBBBBBEL | Driver is active, and vehicle is taking sharp left at fast speed | Vigilant and Aggressive Situation |
| AAABABBBCHJ | Driver is yawning, and vehicle is taking sharp right at moderate speed | Tackle-able Sleepy Situation |
| CCBCBCCDCEL | Driver is yawning, and vehicle is taking sharp left at fast speed | Sleepy and Jeopardize Situation |
| BBCBBCCCCFL | Driver is yawning, and vehicle is taking slight left at fast speed | Sleepy and Rushing Situation |
| DDCCDCDCDEJ | Driver is fatigued, and vehicle is taking sharp left turn at moderate speed | Fatigue with Dangerous Turning |
| DDDCBDDBCHL | Driver is fatigued, and vehicle is taking sharp right turn at fast speed | Fatigue and Jeopardize |
| CCDCDDDCDFI | Driver is fatigued, and vehicle is taking slight left at slow speed | Driver under Fatigue |
| DDDCDDCDCGK | Driver is fatigued, and vehicle is taking a short right at high speed | Fatigue and Speeding Situation |
| Classifier | Training Rate (70%) | Sensitivity | Precision | F1 Score | Validation (15%) | Testing (15%) |
|---|---|---|---|---|---|---|
| BiLSTM | 99.97% | 98.23% | 98.17% | 98.73% | 99.6% | 99.6% |
| SVM | 95.63% | 91.58% | 91.06% | 91.81% | 95.44% | 95.44% |
| faSAX Word | Window Size (Samples) | Temporal Duration (s) | Documents (Reports) | Situation Awareness Class |
|---|---|---|---|---|
| CCCCCCBBBFK | 23 | 0.38 | Driver is yawning, and vehicle is taking slight left at high speed. | Sleepy and Rushing Situation |
| CCDCCCCCCFL | 56 | 0.93 | Driver is yawning, and vehicle is taking slight left at fast speed. | Sleepy and Rushing Situation |
| DDDDDDCCDEI | 70 | 1.17 | Driver is nodding, and vehicle is taking sharp left at slow speed. | Fatigue with Dangerous Turning |
| CCCCCCCCCEI | 50 | 0.83 | Driver is yawning, and vehicle is taking sharp left at slow speed. | Tackle-able Sleepy Situation |
| BBBBBBBBAEJ | 53 | 0.88 | Driver is active, and vehicle is taking sharp left at moderate speed. | Safe Situation |
| CCCCCCBCCFK | 24 | 0.4 | Driver is yawning, and vehicle is taking slight left at high speed. | Sleepy and Rushing Situation |
| DDDDDDDCDGL | 65 | 1.08 | Driver is shaking, Head and vehicle is taking a short right at fast speed. | Fatigue and Speeding Situation |
| CCCCCCCCCHI | 39 | 0.65 | Driver is yawning, and vehicle is taking a sudden right at slow speed. | Tackle-able Sleepy Situation |
| CCCCCCBCCHJ | 93 | 1.55 | Driver is yawning, and vehicle is taking a sudden right at moderate speed. | Tackle-able Sleepy Situation |
| System | Method | Prediction | Merits | Demerits |
|---|---|---|---|---|
| Camera [13] | Facial features | 98% | Real-time, nonintrusive | Lighting problems, unaware of vehicle information, nontemporal tracking. |
| Hybrid [34] | EEG + gyroscope + facial features | 93.91% | Real-time, temporal tracking. | Unaware of vehicle information. |
| Hybrid [33] | Heart rate + facial features | 94.75% | Real-time, temporal tracking. | Unknown of vehicle situation. |
| Proposed Hybrid system | Body posture + Vehicle information | 99.6% | Real-time, temporal tracking, sequence prediction, situation analyses, customizable linguistic or semantic dictionary | Intrusive, requires sensors attached to body, processing delay time. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ansari, S.; Du, H.; Naghdy, F.; Hoshu, A.A.; Stirling, D. A Semantic Hybrid Temporal Approach for Detecting Driver Mental Fatigue. Safety 2024, 10, 9. https://doi.org/10.3390/safety10010009
Ansari S, Du H, Naghdy F, Hoshu AA, Stirling D. A Semantic Hybrid Temporal Approach for Detecting Driver Mental Fatigue. Safety. 2024; 10(1):9. https://doi.org/10.3390/safety10010009
Chicago/Turabian StyleAnsari, Shahzeb, Haiping Du, Fazel Naghdy, Ayaz Ahmed Hoshu, and David Stirling. 2024. "A Semantic Hybrid Temporal Approach for Detecting Driver Mental Fatigue" Safety 10, no. 1: 9. https://doi.org/10.3390/safety10010009
APA StyleAnsari, S., Du, H., Naghdy, F., Hoshu, A. A., & Stirling, D. (2024). A Semantic Hybrid Temporal Approach for Detecting Driver Mental Fatigue. Safety, 10(1), 9. https://doi.org/10.3390/safety10010009