



Design of a Variable Stiffness Gecko-Inspired Foot and Adhesion Performance Test on Flexible Surface



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Model and Design
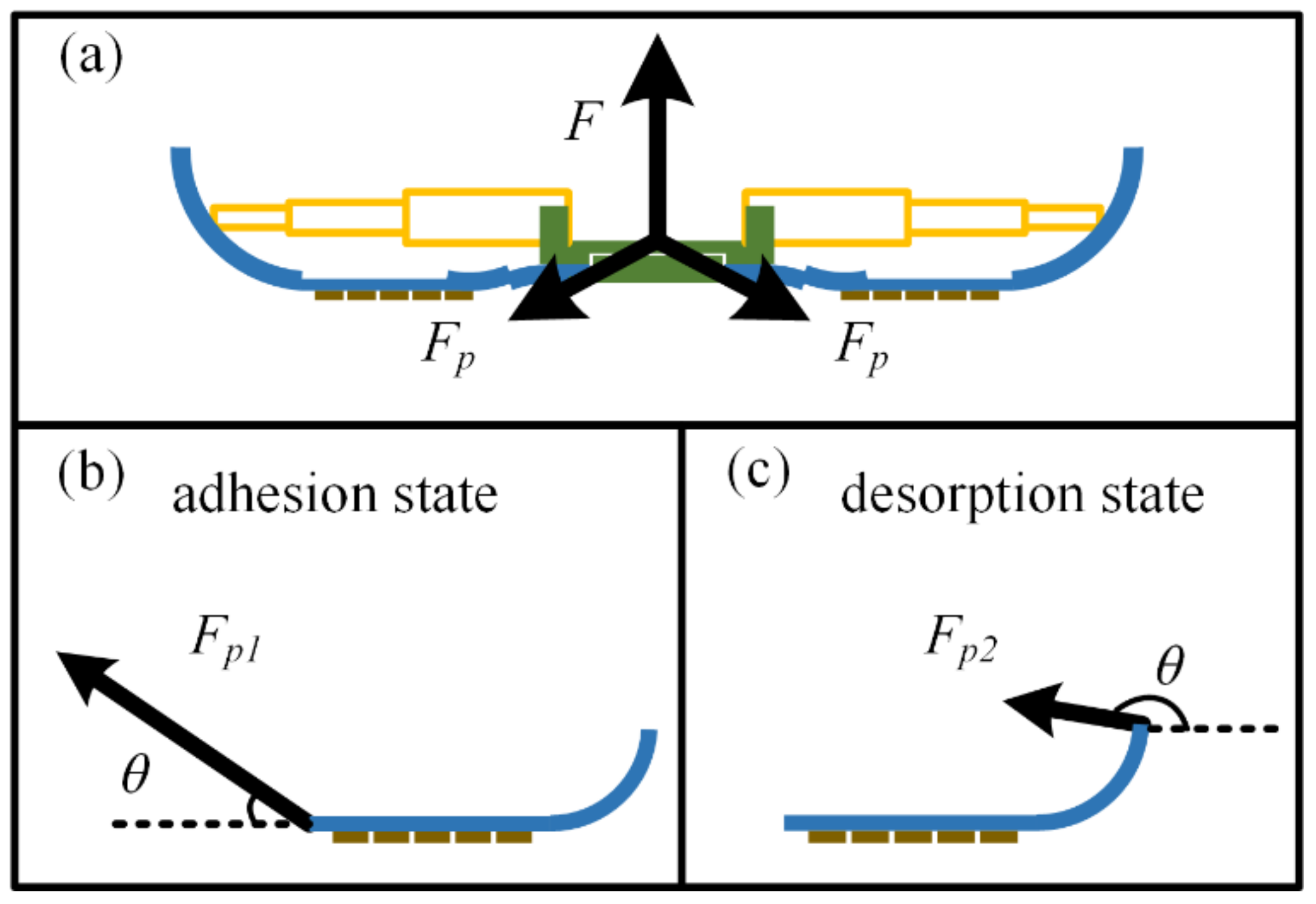
2.1. Theoretical Adhesion Model Establishment
2.2. Model Simulation
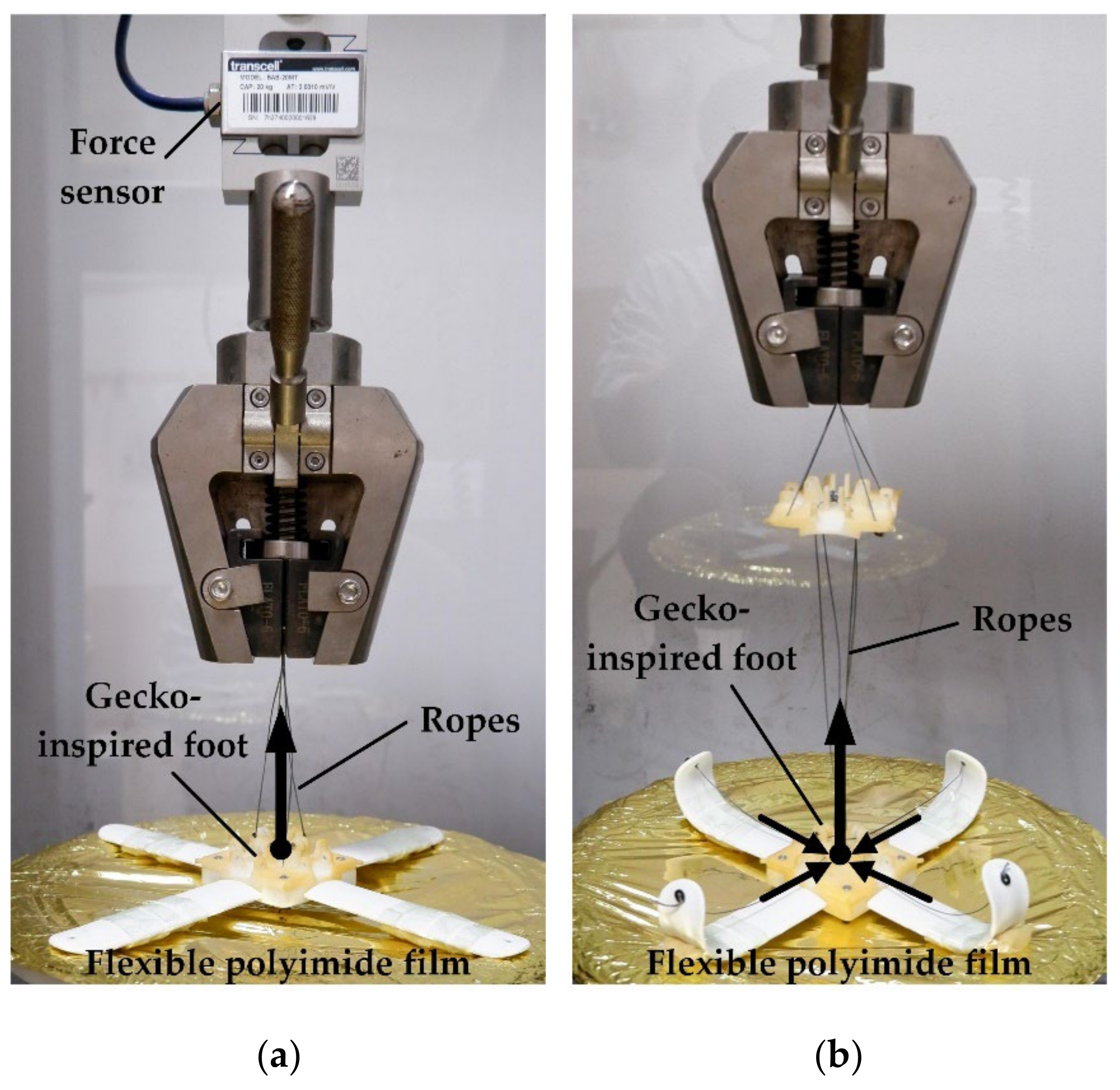
2.3. Adhesive Test Experiment
2.4. Gecko-Inspired Foot Design
2.5. Adhesion Analysis of the Gecko-Inspired Foot
3. Results
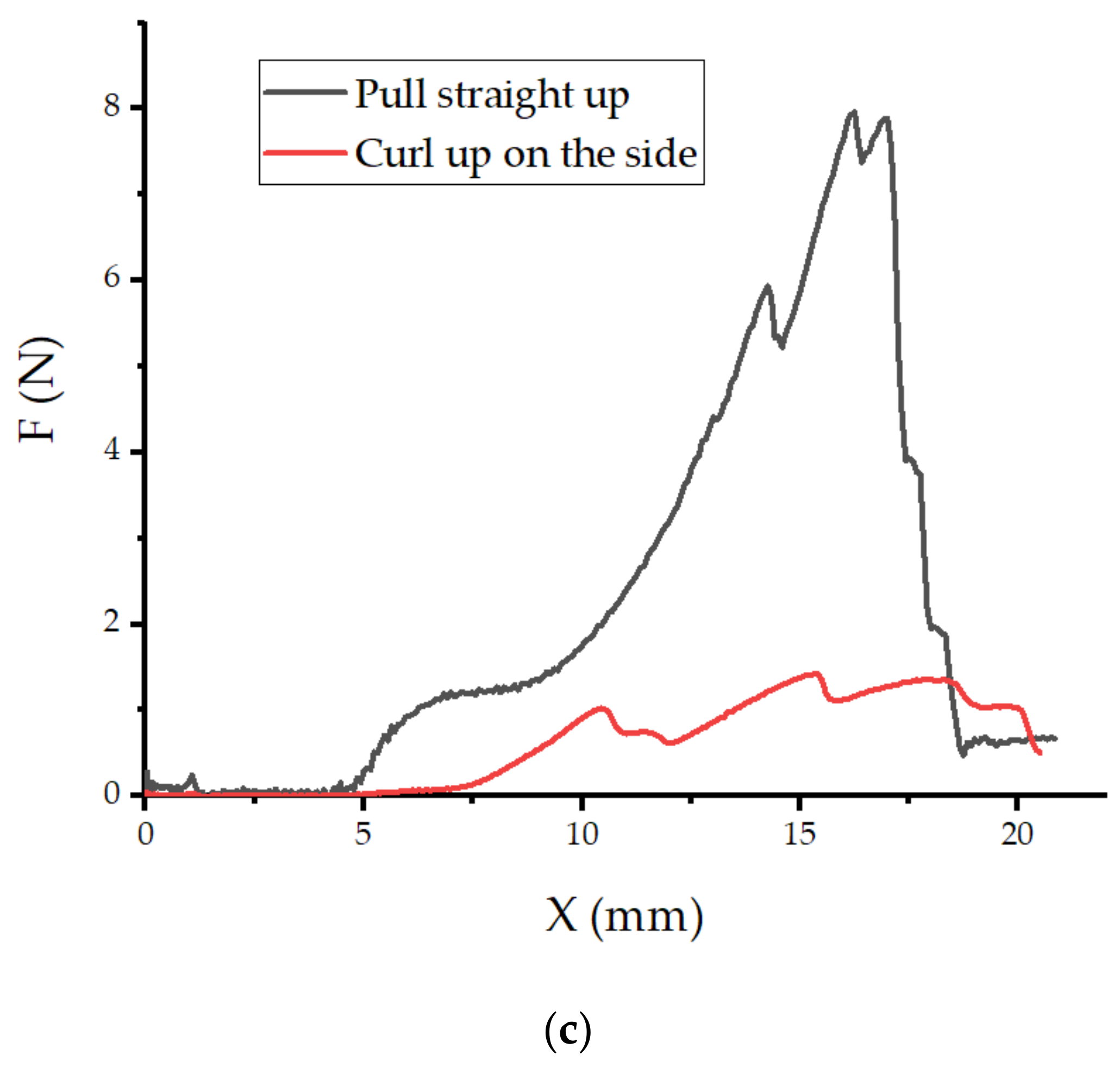
3.1. The Performance Test of the Gecko-Inspired Foot
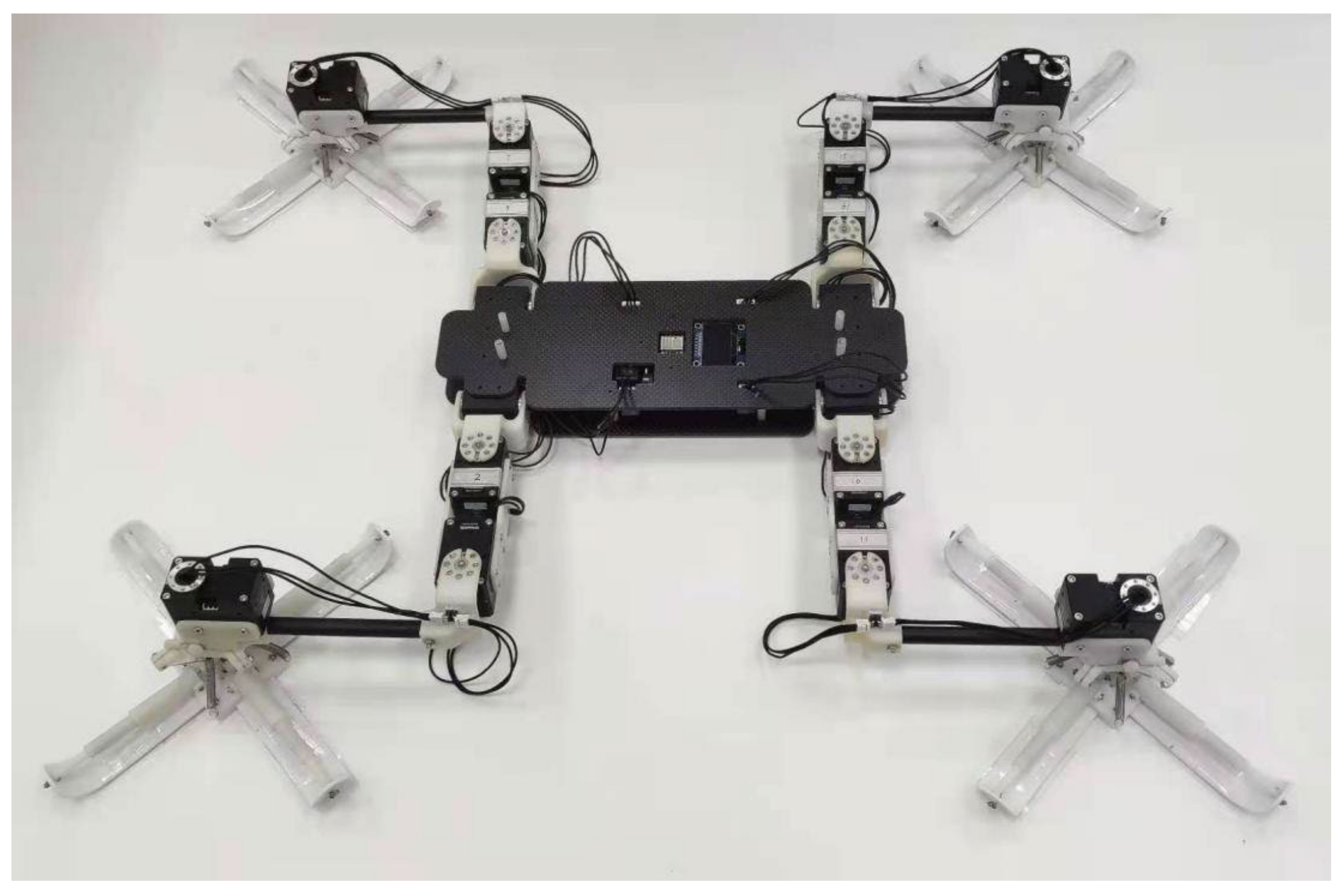
3.2. Application of the Gecko-Inspired Feet
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stoll, E.; Letschnik, J.; Walter, U.; Artigas, J.; Kremer, P.; Preusche, C.; Hirzinger, G. On-orbit servicing. IEEE Robot. Autom. Mag. 2009, 16, 29–33. [Google Scholar] [CrossRef]
- Fremerey, M.; Gorb, S.; Heepe, L.; Kasper, D.; Witte, H. MaTBot: A Magneto adhesive track robot for the inspection of artificial smooth substrates. In Proceedings of the International Symposium on Adaptive Motion of Animals and Machines, Awaji, Japan, 11–14 October 2011; pp. 19–20. [Google Scholar]
- Gillies, A.G.; Kwak, J.; Fearing, R.S. Controllable Particle Adhesion with a Magnetically Actuated Synthetic Gecko Adhesive. Adv. Funct. Mater. 2013, 23, 3256–3261. [Google Scholar] [CrossRef]
- Sabermand, V.; Ghorbanirezaei, S.; Hojjat, Y. Testing the application of Free Flapping Foils (FFF) as a method to improve adhesion in an electrostatic wall-climbing robot. J. Adhes. Sci. Technol. 2019, 33, 2579–2594. [Google Scholar] [CrossRef]
- Liu, R.; Chen, R.; Shen, H.; Zhang, R. Wall Climbing Robot Using Electrostatic Adhesion Force Generated by Flexible Interdigital Electrodes. Int. J. Adv. Robot. Syst. 2013, 10, 36. [Google Scholar] [CrossRef]
- Chanchlani, R.; Swami, S.K.R.; Agarwal, R.; Sharma, S.; Agrawal, M.; Agarwal, R. Intelligent Climber: A Wireless Wall-Climbing Robot Utilizing Vacuum Suction and Sand Paper. In Proceedings of the India Educators Conference, Bangalore, India, 4–5 April 2014; IEEE: New York, NY, USA, 2014. [Google Scholar]
- Chen, R.; Fu, L.; Qiu, Y.; Song, R.; Jin, Y. A gecko-inspired wall-climbing robot based on vibration suction mechanism. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 7132–7143. [Google Scholar] [CrossRef]
- Li, Y.; Krahn, J.; Menon, C. Bioinspired dry adhesive materials and their application in robotics: A review. J. Bionic Eng. 2016, 13, 181–199. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Ulmen, J.; Esparza, N.; Cutkosky, M.R. Scaling walls: Applying dry adhesives to the real world. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: New York, NY, USA, 2011. [Google Scholar]
- Yu, Z.; Shi, Y.; Xie, J.; Yang, S.X.; Dai, Z. Design and analysis of a bionic adhesive foot for gecko robot climbing the ceiling. Int. J. Robot. Autom. 2018, 33, 445–454. [Google Scholar] [CrossRef]
- Bian, S.; Wei, Y.; Xu, F.; Kong, D. A four-legged wall-climbing robot with spines and miniature setae array inspired by Longicorn and Gecko. J. Bionic Eng. 2021, 18, 292–305. [Google Scholar] [CrossRef]
- Song, Y.; Weng, Z.; Yuan, J.; Zhang, L.; Wang, Z.; Dai, Z.; Full, R.J. Incline-dependent adjustments of toes in geckos inspire functional strategies for biomimetic manipulators. Bioinspir. Biomim. 2022, 17, 046010. [Google Scholar] [CrossRef]
- Li, Y.; Ahmed, A.; Sameoto, D.; Menon, C. Abigaille II: Toward the development of a spider-inspired climbing robot. Robotica 2012, 30, 79–89. [Google Scholar] [CrossRef]
- Krahn, J.; Liu, Y.; Sadeghi, A.; Menon, C. A tailless timing belt climbing platform utilizing dry adhesives with mushroom caps. Smart Mater. Struct. 2011, 20, 115021. [Google Scholar] [CrossRef]
- Seo, T.; Sitti, M. Tank-Like Module-Based Climbing Robot Using Passive Compliant Joints. IEEE ASME Trans. Mechatron. 2013, 18, 397–408. [Google Scholar] [CrossRef]
- Haomachai, W.; Shao, D.; Wang, W.; Ji, A.; Dai, Z.; Manoonpong, P. Lateral undulation of the bendable body of a gecko-inspired robot for energy-efficient inclined surface climbing. IEEE Robot. Autom. Lett. 2021, 6, 7917–7924. [Google Scholar] [CrossRef]
- Chen, T.G.; Cauligi, A.; Suresh, S.A.; Pavone, M.; Cutkosky, M. Testing Gecko-Inspired Adhesives with Astrobee Aboard the International Space Station: Readying the Technology for Space. IEEE Robot. Autom. Mag. 2022, 2–11. [Google Scholar] [CrossRef]
- Ruotolo, W.; Brouwer, D.; Cutkosky, M.R. From grasping to manipulation with gecko-inspired adhesives on a multifinger gripper. Sci. Robot. 2021, 6, eabi9773. [Google Scholar] [CrossRef]
- Murphy, M.P.; Tso, W.; Tanzini, M.; Sitti, M. Waalbot: An Agile Small-Scale Wall Climbing Robot Utilizing Pressure Sensitive Adhesives. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Beijing, China, 9–15 October 2006; IEEE: New York, NY, USA, 2006. [Google Scholar]
- Murphy, M.P.; Kute, C.; Mengüç, Y. Waalbot II: Adhesion recovery and improved performance of a climbing robot using fibrillar adhesives. Int. J. Robot. Res. 2011, 30, 118–133. [Google Scholar] [CrossRef]
- Unver, O.; Uneri, A.; Aydemir, A.; Sitti, M. Geckobot: A gecko inspired climbing robot using elastomer adhesives. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; IEEE: New York, NY, USA, 2006; pp. 2329–2335. [Google Scholar]
- Menon, C.; Li, Y.; Sameoto, D.; Martens, C. Abigaille-I: Towards the development of a spider-inspired climbing robot for space use. In Proceedings of the 2008 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, AZ, USA, 19–22 October 2008; IEEE: New York, NY, USA, 2008. [Google Scholar]
- Henrey, M.; Ahmed, A.; Boscariol, P.; Shannon, L.; Menon, C. Abigaille-III: A Versatile, Bioinspired Hexapod for Scaling Smooth Vertical Surfaces. J. Bionic Eng. 2014, 11, 1–17. [Google Scholar] [CrossRef]
- Heepe, L.; Gore, S.N. Biologically Inspired Mushroom-Shaped Adhesive Microstructures. Annu. Rev. Mater. Res. 2014, 44, 173–203. [Google Scholar] [CrossRef]
- Wang, W.; Liu, Y.; Xie, Z. Gecko-like dry adhesive surfaces and their applications: A review. J. Bionic Eng. 2021, 18, 1011–1044. [Google Scholar] [CrossRef]
- Pesika, N.S.; Tian, Y.; Zhao, B.; Rosenberg, K.; Zeng, H.; McGuiggan, P.; Autumn, K.; Israelachvili, J.N. Peel-Zone Model of Tape Peeling Based on the Gecko Adhesive System. J. Adhes. 2007, 83, 383–401. [Google Scholar] [CrossRef] [Green Version]
- Zhou, M.; Pesika, N.; Zeng, H.; Wan, J.; Zhang, X.; Meng, Y.; Wen, S.; Tian, Y. Design of gecko-inspired fibrillar surfaces with strong attachment and easy-removal prop-erties: A numerical analysis of peel-zone. J. R. Soc. Interface 2012, 9, 2424–2436. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Dai, Z.; Ji, A.; Ren, L.; Xing, Q.; Dai, L. Biomechanics of gecko locomotion: The patterns of reaction forces on inverted, vertical and horizontal substrates. Bioinspir. Biomim. 2015, 10, 016019. [Google Scholar] [CrossRef] [PubMed] [Green Version]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Fu, J.; Ji, Y.; Zhao, B.; Ji, A. Design of a Variable Stiffness Gecko-Inspired Foot and Adhesion Performance Test on Flexible Surface. Biomimetics 2022, 7, 125. https://doi.org/10.3390/biomimetics7030125
Yu Z, Fu J, Ji Y, Zhao B, Ji A. Design of a Variable Stiffness Gecko-Inspired Foot and Adhesion Performance Test on Flexible Surface. Biomimetics. 2022; 7(3):125. https://doi.org/10.3390/biomimetics7030125
Chicago/Turabian StyleYu, Zhiwei, Jiahui Fu, Yu Ji, Benhua Zhao, and Aihong Ji. 2022. "Design of a Variable Stiffness Gecko-Inspired Foot and Adhesion Performance Test on Flexible Surface" Biomimetics 7, no. 3: 125. https://doi.org/10.3390/biomimetics7030125
APA StyleYu, Z., Fu, J., Ji, Y., Zhao, B., & Ji, A. (2022). Design of a Variable Stiffness Gecko-Inspired Foot and Adhesion Performance Test on Flexible Surface. Biomimetics, 7(3), 125. https://doi.org/10.3390/biomimetics7030125