
Gender Differences in Performing an Overhead Drilling Task Using an Exoskeleton—A Cross-Sectional Study
 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
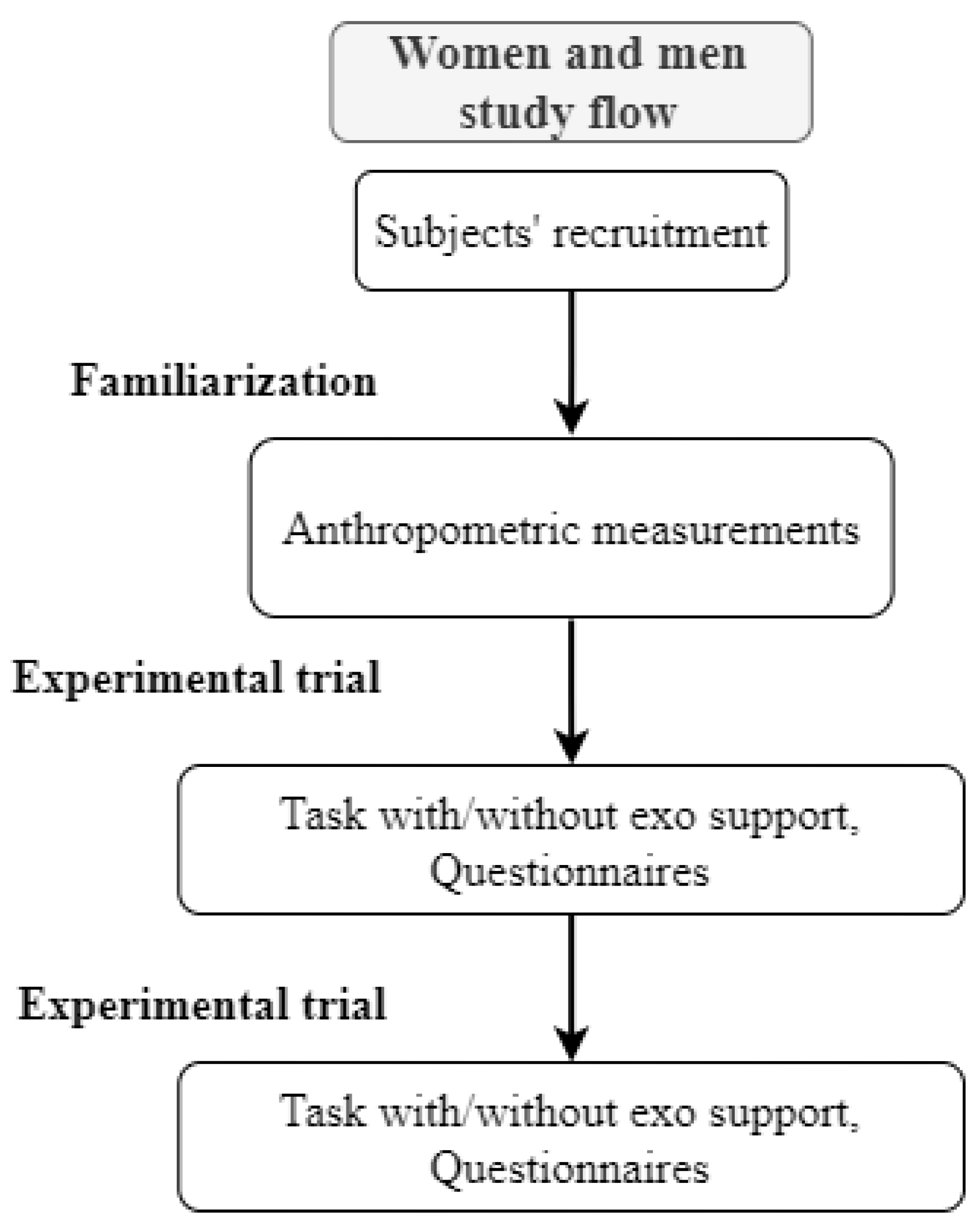
2.1. Study Design
2.2. Participants
2.2.1. Sample Size Calculation
2.2.2. Inclusion and Exclusion Criteria
2.2.3. Participant Description
2.2.4. Restrictions and Prohibitions for the Subjects
2.3. Measurements
2.3.1. Anthropometric Data
2.3.2. Drilling Performance
2.3.3. Perceived Exertion BORG Scale
2.3.4. System Usability Scale (SUS)
2.3.5. Passive Shoulder Exoskeleton Characteristics
2.4. Procedures
Familiarization
2.5. Statistics
3. Results
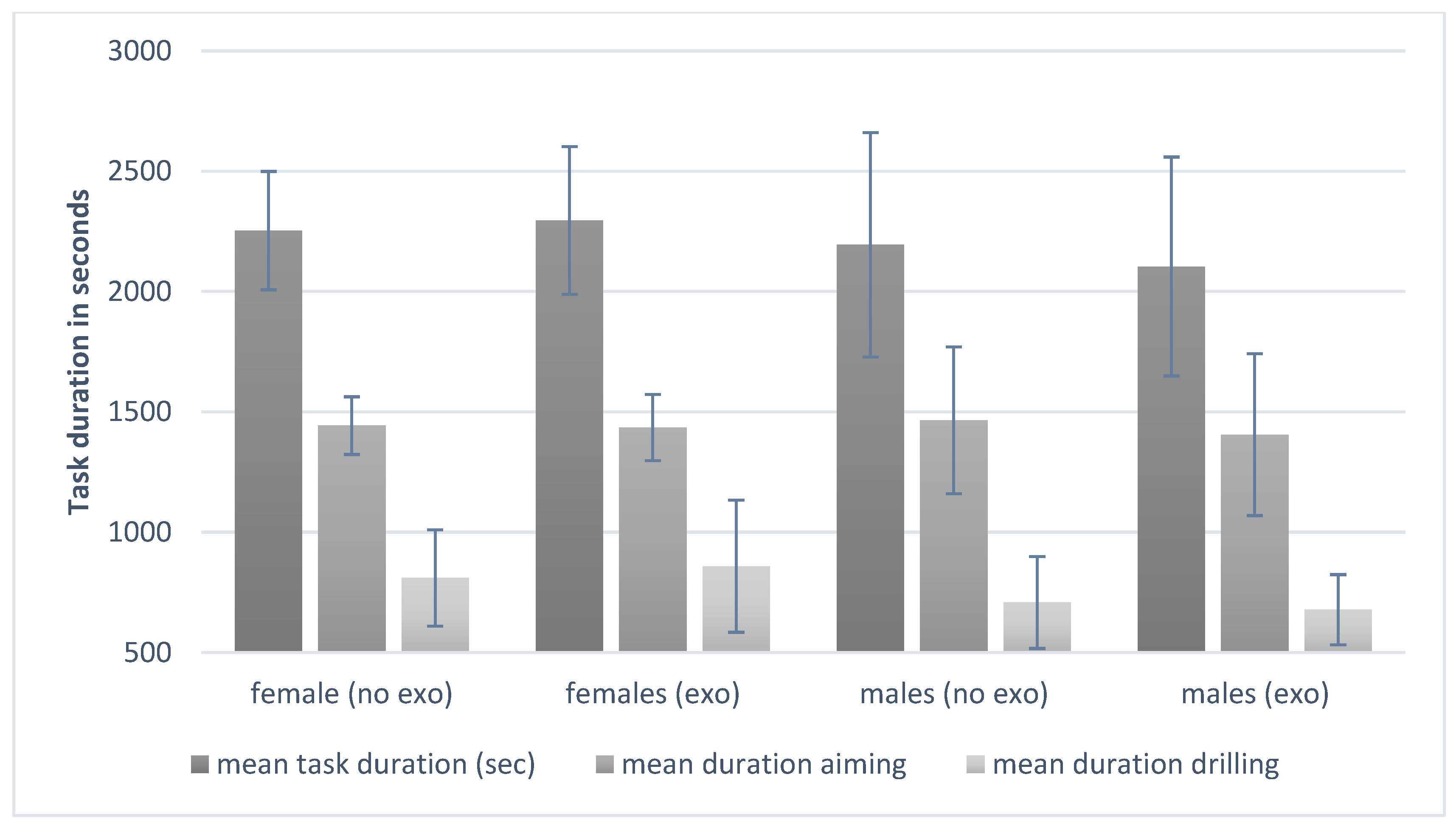
3.1. Drilling Performance
3.2. Perceived Exertion
3.3. System Usability
4. Discussion
4.1. Performance
4.2. Perceived Exertion
4.3. System Usability
4.4. Strength and Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Reid, C.R.; Nussbaum, M.A.; Gregorczyk, K.; Harris-Adamson, C.; Kyte, K.; Lowe, B.; Smets, M.; Zmijewski, R. Industrial exoskeletons: Are we ready for prime time yet? Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2017, 61, 1000–1004. [Google Scholar] [CrossRef]
- McFarland, T.; Fischer, S. Considerations for industrial use: A systematic review of the impact of active and passive upper limb exoskeletons on physical exposures. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 322–347. [Google Scholar] [CrossRef]
- Theurel, J.; Desbrosses, K. Occupational Exoskeletons: Overview of Their Benefits and Limitations in Preventing Work-Related Musculoskeletal Disorders. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 264–280. [Google Scholar] [CrossRef]
- Crea, S.; Beckerle, P.; de Looze, M.; de Pauw, K.; Grazi, L.; Kermavnar, T.; Masood, J.; O’Sullivan, L.W.; Pacifico, I.; Rodriguez-Guerrero, C. Occupational exoskeletons: A roadmap toward large-scale adoption. Methodology and challenges of bringing exoskeletons to workplaces. Wearable Technol. 2021, 2, e11. [Google Scholar] [CrossRef] [PubMed]
- Leibman, D.; Choi, H. Individual Differences in Body Mass, Biological Sex, and Physical Fitness Affecting Human-Exoskeleton Interactions. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2023, 67, 1794–1800. [Google Scholar] [CrossRef]
- Miller, A.E.J.; MacDougall, J.D.; Tarnopolsky, M.A.; Sale, D.G. Gender differences in strength and muscle fiber characteristics. Eur. J. Appl. Physiol. Occup. Physiol. 1993, 66, 254–262. [Google Scholar] [CrossRef] [PubMed]
- Maughan, R.J.; Watson, J.S.; Weir, J. Strength and cross-sectional area of human skeletal muscle. J. Physiol. 1983, 338, 37–49. [Google Scholar] [CrossRef]
- Ryman Augustsson, S.; Bersås, E.; Magnusson Thomas, E.; Sahlberg, M.; Augustsson, J.; Svantesson, U. Gender differences and reliability of selected physical performance tests in young women and men. Adv. Physiother. 2009, 11, 64–70. [Google Scholar] [CrossRef]
- Ojelade, A.; Morris, W.; Kim, S.; Kelson, D.; Srinivasan, D.; Smets, M.; Nussbaum, M.A. Three passive arm-support exoskeletons have inconsistent effects on muscle activity, posture, and perceived exertion during diverse simulated pseudo-static overhead nutrunning tasks. Appl. Ergon. 2023, 110, 104015. [Google Scholar] [CrossRef]
- de Bock, S.; Ampe, T.; Rossini, M.; Tassignon, B.; Lefeber, D.; Rodriguez-Guerrero, C.; Roelands, B.; Geeroms, J.; Meeusen, R.; de Pauw, K. Passive shoulder exoskeleton support partially mitigates fatigue-induced effects in overhead work. Appl. Ergon. 2023, 106, 103903. [Google Scholar] [CrossRef]
- Srinivasan, D.; Sinden, K.E.; Mathiassen, S.E.; Côté, J.N. Gender differences in fatigability and muscle activity responses to a short-cycle repetitive task. Eur. J. Appl. Physiol. 2016, 116, 2357–2365. [Google Scholar] [CrossRef] [PubMed]
- Janssen, I.; Heymsfield, S.B.; Wang, Z.; Ross, R. Skeletal muscle mass and distribution in 468 men and women aged 18–88 yr. J. Appl. Physiol. 2000, 89, 81–88. [Google Scholar] [CrossRef] [PubMed]
- Lamers, E.P.; Soltys, J.C.; Scherpereel, K.L.; Yang, A.J.; Zelik, K.E. Low-profile elastic exosuit reduces back muscle fatigue. Sci. Rep. 2020, 10, 15958. [Google Scholar] [CrossRef] [PubMed]
- Barnes, C.J.; Van Steyn, S.J.; Fischer, R.A. The effects of age, sex, and shoulder dominance on range of motion of the shoulder. J. Shoulder Elb. Surg. 2001, 10, 242–246. [Google Scholar] [CrossRef]
- Kibler, W.B.; Sciascia, A.D.; Uhl, T.L.; Tambay, N.; Cunningham, T. Electromyographic analysis of specific exercises for scapular control in early phases of shoulder rehabilitation. Am. J. Sports Med. 2008, 36, 1789–1798. [Google Scholar] [CrossRef]
- Schmalz, T.; Schändlinger, J.; Schuler, M.; Bornmann, J.; Schirrmeister, B.; Kannenberg, A.; Ernst, M. Biomechanical and metabolic effectiveness of an industrial exoskeleton for overhead work. Int. J. Environ. Res. Public Health 2019, 16, 4792. [Google Scholar] [CrossRef]
- Côté, J.N. A critical review on physical factors and functional characteristics that may explain a sex/gender difference in work-related neck/shoulder disorders. Ergonomics 2012, 55, 173–182. [Google Scholar] [CrossRef]
- Ashta, G.; Finco, S.; Battini, D.; Persona, A. Passive Exoskeletons to Enhance Workforce Sustainability: Literature Review and Future Research Agenda. Sustainability 2023, 15, 7339. [Google Scholar] [CrossRef]
- Gräf, J.; Grospretre, S.; Argubi-Wollesen, A.; Wollesen, B. Impact of a passive upper-body exoskeleton on muscular activity and precision in overhead single and dual tasks: An explorative randomized crossover study. Front. Neurol. 2024, 15, 1405473. [Google Scholar] [CrossRef]
- Kranenborg, S.E.; Greve, C.; Reneman, M.F.; Roossien, C.C. Side-effects and adverse events of a shoulder-and back-support exoskeleton in workers: A systematic review. Appl. Ergon. 2023, 111, 104042. [Google Scholar] [CrossRef]
- Gutierrez, N.; Ojelade, A.; Kim, S.; Barr, A.; Akanmu, A.; Nussbaum, M.A.; Harris-Adamson, C. Perceived benefits, barriers, perceptions, and readiness to use exoskeletons in the construction industry: Differences by demographic characteristics. Appl. Ergon. 2024, 116, 104199. [Google Scholar] [CrossRef] [PubMed]
- Cardoso, A.; Colim, A.; Sousa, N. The effects of a passive exoskeleton on muscle activity and discomfort in industrial tasks. In Occupational and Environmental Safety and Health II; Springer: Cham, Switzerland, 2020; pp. 237–245. [Google Scholar]
- Luger, T.; Bosch, T.; Hoozemans, M.; de Looze, M.; Veeger, D. Task variation during simulated, repetitive, low-intensity work–influence on manifestation of shoulder muscle fatigue, perceived discomfort and upper-body postures. Ergonomics 2015, 58, 1851–1867. [Google Scholar] [CrossRef] [PubMed]
- Luger, T.; Bär, M.; Seibt, R.; Rieger, M.A.; Steinhilber, B. Using a back exoskeleton during industrial and functional tasks—Effects on muscle activity, posture, performance, usability, and wearer discomfort in a laboratory trial. Hum. Factors 2023, 65, 5–21. [Google Scholar] [CrossRef]
- Sood, D.; Nussbaum, M.A.; Hager, K. Fatigue during prolonged intermittent overhead work: Reliability of measures and effects of working height. Ergonomics 2007, 50, 497–513. [Google Scholar] [CrossRef]
- Kim, S.; Nussbaum, M.A.; Esfahani, M.I.M.; Alemi, M.M.; Alabdulkarim, S.; Rashedi, E. Assessing the influence of a passive, upper extremity exoskeletal vest for tasks requiring arm elevation: Part I–“Expected” effects on discomfort, shoulder muscle activity, and work task performance. Appl. Ergon. 2018, 70, 315–322. [Google Scholar] [CrossRef] [PubMed]
- Borg, G. Borg’s Perceived Exertion and Pain Scales; Human Kinetics: Champaign, IL, USA, 1998. [Google Scholar]
- Borg, G.A.V. Psychophysical bases of perceived exertion. Med. Sci. Sports Exerc. 1982, 14, 377–381. [Google Scholar] [CrossRef] [PubMed]
- Borg, E.; Borg, G. A comparison of AME and CR100 for scaling perceived exertion. Acta Psychol. 2002, 109, 157–175. [Google Scholar] [CrossRef]
- Borg, G.; Borg, E. A new generation of scaling methods: Level-anchored ratio scaling. Psychologica 2001, 28, 15–45. [Google Scholar]
- Brooke, J. SUS: A “quick and dirty” Usability Scale. Usability Eval. Ind./Taylor Fr. 1996, 189, 4–7. [Google Scholar]
- Rossini, M.; De Bock, S.; van der Have, A.; Flynn, L.; Rodriguez-Cianca, D.; De Pauw, K.; Lefeber, D.; Geeroms, J.; Rodriguez-Guerrero, C. Design and evaluation of a passive cable-driven occupational shoulder exoskeleton. IEEE Trans. Med. Robot. Bionics 2021, 3, 1020–1031. [Google Scholar] [CrossRef]
- Renda, E.; Lamanuzzi, S.; Dal Maso, F.; Côté, J.N. The effects of hand dominance, fatigue, and sex on muscle activation during a repetitive overhead fatiguing task. Hum. Mov. Sci. 2023, 92, 103149. [Google Scholar] [CrossRef] [PubMed]
- Hunter, S.K. Sex differences in human fatigability: Mechanisms and insight to physiological responses. Acta Physiol. 2014, 210, 768–789. [Google Scholar] [CrossRef] [PubMed]
- Schwartz, M.; Desbrosses, K.; Theurel, J.; Mornieux, G. Biomechanical consequences of using passive and active back-support exoskeletons during different manual handling tasks. Int. J. Environ. Res. Public Health 2023, 20, 6468. [Google Scholar] [CrossRef] [PubMed]
- Liutsko, L.; Muiños, R.; Tous Ral, J.M.; Contreras, M.J. Fine motor precision tasks: Sex differences in performance with and without visual guidance across different age groups. Behav. Sci. 2020, 10, 36. [Google Scholar] [CrossRef]
- Raghuraman, R.N.; Barbieri, D.F.; Aviles, J.; Srinivasan, D. Age and gender differences in the perception and use of soft vs. rigid exoskeletons for manual material handling. Ergonomics 2024, 1–18. [Google Scholar] [CrossRef]
- Roda-Sales, A.; Vergara, M.; Sancho-Bru, J.L.; Gracia-Ibáñez, V.; Jarque-Bou, N.J. Effect of assistive devices on hand and arm posture during activities of daily living. Appl. Ergon. 2019, 76, 64–72. [Google Scholar] [CrossRef]
- Perry, J.C.; Rosen, J.; Burns, S. Upper-limb powered exoskeleton design. IEEE/ASME Trans. Mechatron. 2007, 12, 408–417. [Google Scholar] [CrossRef]
- Hunter, S.K. Sex differences and mechanisms of task-specific muscle fatigue. Exerc. Sport Sci. Rev. 2009, 37, 113–122. [Google Scholar] [CrossRef] [PubMed]
- Sauer, J.; Sonderegger, A.; Schmutz, S. Usability, user experience and accessibility: Towards an integrative model. Ergonomics 2020, 63, 1207–1220. [Google Scholar] [CrossRef]
- Sonderegger, A.; Sauer, J. The influence of design aesthetics in usability testing: Effects on user performance and perceived usability. Appl. Ergon. 2010, 41, 403–410. [Google Scholar] [CrossRef]
- Siedl, S.M.; Mara, M. Exoskeleton acceptance and its relationship to self-efficacy enhancement, perceived usefulness, and physical relief: A field study among logistics workers. Wearable Technol. 2021, 2, e10. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Anthropometrics | Female n = 20 (MW ± SD) | Male n = 16 (MW ± SD) | F (1,34) p |
|---|---|---|---|
| Body height (m) | 1.65 ± 0.04 | 1.81 ± 0.06 | 93.592 <0.001 |
| Body mass (kg) | 61.3 ± 8.5 | 81.4 ± 7.6 | 54.495 <0.001 |
| BMI | 22.5 ± 2.7 | 24.8 ± 2.4 | 7.042 0.012 |
| Fingertip height (m) | 2.09 ± 6.9 | 2.35 ± 8.3 | 99.773 <0.001 |
| Fingertip height (m) with elbow at 90 degrees | 1.73 ± 5.4 | 1.92 ± 4.1 | 126.463 <0.001 |
| Performance | Female noExo (M ± SD) | Female Exo (M ± SD) | Male noExo (M ± SD) | Male Exo (M ± SD) | Gender Differences F p eta2 | Interactions no Exo/Exo and Gender F p eta2 |
|---|---|---|---|---|---|---|
| mean task duration (s) | 2253.7 ± 246 | 2295.1 ± 307.2 | 2194.9 ± 467.1 | 2104 ± 455.3 | 0.954 0.327 0.030 | 3.492 0.071 0.098 |
| mean duration aiming | 1443 ± 120.7 | 1435.5 ± 138.7 | 1465 ± 305.8 | 1405 ± 336.8 | 0.142 0.709 0.005 | 1.257 0.271 0.038 |
| mean duration drilling | 810.5 ± 200.8 | 859.6 ± 275.8 | 708.6 ± 191.2 | 678.5 ± 146.5 | 2.149 0.152 0.063 | 1.609 0.214 0.048 |
| mean error integral aiming | 0.133 ± 0.031 | 0.165± 0.043 | 0.313 ± 0.137 | 0.279 ± 0.120 | 25.153 <0.001 0.440 | 5.509 0.025 0.147 |
| mean error integral drilling | 0.102 ± 0.034 | 0.144 ± 0.163 | 0.274 ± 0.151 | 0.264 ± 0.133 | 16.766 <0.001 0.344 | 1.717 0.199 0.051 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wollesen, B.; Gräf, J.; De Bock, S.; Alfio, E.; Díaz, M.A.; De Pauw, K. Gender Differences in Performing an Overhead Drilling Task Using an Exoskeleton—A Cross-Sectional Study. Biomimetics 2024, 9, 601. https://doi.org/10.3390/biomimetics9100601
Wollesen B, Gräf J, De Bock S, Alfio E, Díaz MA, De Pauw K. Gender Differences in Performing an Overhead Drilling Task Using an Exoskeleton—A Cross-Sectional Study. Biomimetics. 2024; 9(10):601. https://doi.org/10.3390/biomimetics9100601
Chicago/Turabian StyleWollesen, Bettina, Julia Gräf, Sander De Bock, Eligia Alfio, María Alejandra Díaz, and Kevin De Pauw. 2024. "Gender Differences in Performing an Overhead Drilling Task Using an Exoskeleton—A Cross-Sectional Study" Biomimetics 9, no. 10: 601. https://doi.org/10.3390/biomimetics9100601