
A Hierarchical Prediction Method for Pedestrian Head Injury in Intelligent Vehicle with Combined Active and Passive Safety System





Abstract
1. Introduction
2. Modeling and Validation of Intelligent Vehicle–Pedestrian Interaction Systems
2.1. Intelligent Vehicle–Pedestrian Interaction System with a Combined Active and Passive System
2.2. System Modeling
2.3. Model Validation
3. Construction of Intelligent Vehicle Database with a Combined Active and Passive System
3.1. Data Sample Screening
3.2. Database Construction
4. Parameter Analysis
4.1. Parameter Analysis of Engine Hood Airbag
4.2. Vehicle Braking Curve Parameter Analysis
4.3. Parametric Analysis of a Combined Active and Passive System
5. Prediction Classification Method of Pedestrian Head Injury
6. Conclusions
- The engine hood airbag has a good protective effect on pedestrian head injury. In pedestrian–vehicle collisions, the engine hood airbag can protect the pedestrian’s head and avoid direct collision with the front windshield, engine hood, and other rigid parts, thereby effectively reducing the head injury. When the inflation mass of the engine hood airbag is less than 70%, nearly 70% of the cases in the simulation experiment have HIC more than 1000, and the airbag cannot effectively protect the pedestrian’s head in collisions.
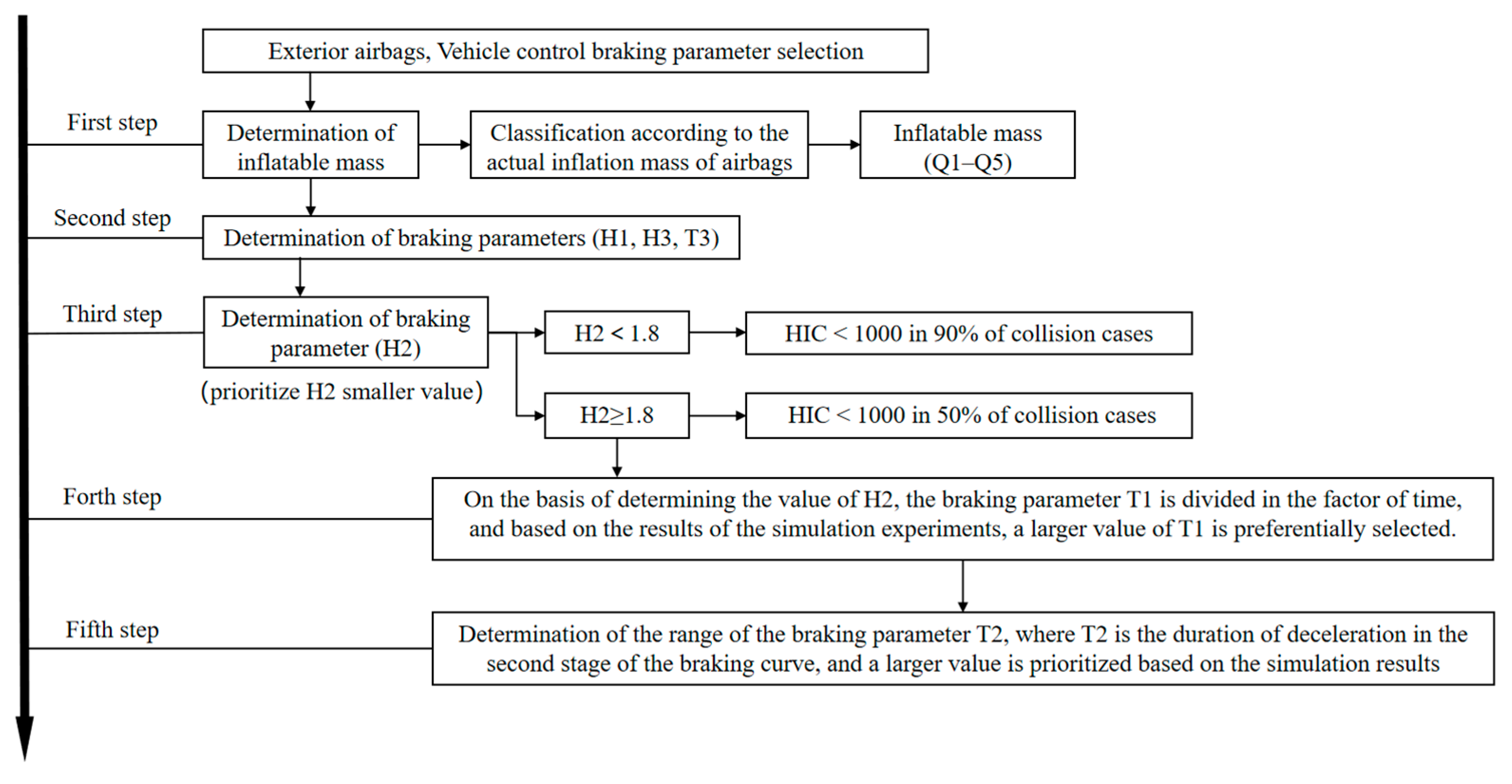
- Controlling the vehicle braking system process can effectively reduce the risk of pedestrian landing injury. A braking parameter H2 lower than 1.8 can effectively reduce HIC. Specifically, braking curve parameters such as T1, T2, and H2 have a high correlation with pedestrian head injury, in which T1 and T2 are negatively correlated with HIC, while H2 is positively correlated with HIC. Therefore, the larger values of T1 and T2 and the smaller value of H2 are preferred in selecting the braking curve value in priority.
- In this paper, by analyzing the intelligent vehicle database with a combined active and passive system and the system parameters, a hierarchy design of an active and passive system is proposed, which can effectively reduce pedestrian HIC and avoid a large number of repetitive and erroneous simulation trials. The design sequence is as follows: the airbag inflation mass > the braking curve parameters H1, H3, and T3 parameters > braking parameter H2 > the braking parameter T1 > braking parameter T2.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fernandes, F.A.O.; Alves de Sousa, R.J.; Ptak, M. Application of Numerical Methods for Accident Reconstruction and Forensic Analysis. Head Inj. Simul. Road Traffic Accid. 2018, 28, 59–98. [Google Scholar]
- Schachner, M.; Sinz, W.; Thomson, R.; Klug, C. Development and evaluation of potential accident scenarios involving pedestrians and AEB-equipped vehicles to demonstrate the efficiency of an enhanced open-source simulation framework. Accid. Anal. Prev. 2020, 148, 105831. [Google Scholar] [CrossRef] [PubMed]
- Leo, C.; Fredriksson, A.; Grumert, E.; Linder, A.; Schachner, M.; Tidborg, F.; Klug, C. Holistic pedestrian safety assessment for average males and females. Front. Public Health 2023, 11, 1199949. [Google Scholar] [CrossRef] [PubMed]
- National Bureau of Statistics. China Statistical Yearbook 2023; China Statistical Publishing House: Beijing, China, 2023.
- Ptak, M. Method to Assess and Enhance Vulnerable Road User Safety during Impact Loading. Appl. Sci. 2019, 9, 1000. [Google Scholar] [CrossRef]
- Huang, J.; Peng, Y.; Hu, L. A multilayer stacking method base on RFE-SHAP feature selection strategy for recognition of driver’s mental load and emotional state. Expert Syst. Appl. 2024, 238, 121729. [Google Scholar] [CrossRef]
- Hu, L.; Li, H.; Yi, P.; Huang, J.; Lin, M.; Wang, H. Investigation on AEB Key Parameters for Improving Car to Two-Wheeler Collision Safety Using In-Depth Traffic Accident Data. IEEE Trans. Veh. Technol. 2023, 72, 113–124. [Google Scholar] [CrossRef]
- Hu, L.; Ou, J.; Huang, J.; Wang, F.; Wang, Y.; Ren, B.; Peng, H.; Zhou, L. Safety Evaluation of Pedestrian-Vehicle Interaction at Signalized Intersections in Changsha, China. J. Transp. Saf. Secur. 2022, 14, 1750–1775. [Google Scholar] [CrossRef]
- Fu, Y.; Li, C.; Yu, F.R.; Luan, T.H.; Zhang, Y. A Decision-making Strategy for Vehicle Autonomous Braking in Emergency via Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2020, 69, 5876–5888. [Google Scholar] [CrossRef]
- Turki, A.; Basharat, R.S.; Ahmed, A.A. Autonomous Vehicle with Emergency Braking Algorithm Based on Multi-Sensor Fusion and Super Twisting Speed Controller. Appl. Sci. 2022, 12, 8458. [Google Scholar]
- Chen, M.; Zhan, X.; Zhang, X.; Pan, W. Localisation-based autonomous vehicle rear-end collision avoidance by emergency steering. IET Intell. Transp. Syst. 2019, 13, 1078–1087. [Google Scholar] [CrossRef]
- Yang, W.; Zhang, Z.; Jiang, K.; Lei, Q.; Zong, K. Optimization of Emergency Braking Pedestrian Collision Avoidance for Autonomous Vehicle Fusing the Fuzzy Neural Network with the Genetic Algorithm. Int. J. Control. Autom. Syst. 2022, 20, 2379–2390. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, Z.; Tian, G.; Wang, W.; Li, Z. A hybrid QFD-based human-centric decision making approach of disassembly schemes under interval 2-tuple q-rung orthopair fuzzy sets. IEEE Trans. Autom. Sci. Eng. 2023, 1–12. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, H.; Wang, D.; Yu, H.; Wang, L.; Yu, D.; Peng, Y. Preference-based multi-attribute decision-making method with spherical-Z fuzzy sets for green product design. Eng. Appl. Artif. Intell. 2023, 126, 106767. [Google Scholar] [CrossRef]
- Li, H.; Liu, Z.; Zhu, P. An improved multi-objective optimization algorithm with mixed variables for automobile engine hood lightweight design. J. Mech. Sci. Technol. 2021, 35, 2073–2082. [Google Scholar] [CrossRef]
- Wdowicz, D.; Ptak, M. Numerical Approaches to Pedestrian Impact Simulation with Human Body Models: A Review. Arch. Comput. Methods Eng. 2023, 30, 4687–4709. [Google Scholar] [CrossRef]
- Wang, F.; Yu, C.; Wang, B.; Li, G.; Miller, K.; Wittek, A. Prediction of pedestrian brain injury due to vehicle impact using computational biomechanics models: Are head-only models sufficient? Traffic Inj. Prev. 2020, 21, 102–107. [Google Scholar] [CrossRef] [PubMed]
- Hu, L.; Bao, X.; Lin, M.; Yu, C.; Wang, F. Research on risky driving behavior evaluation model based on CIDAS real data. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2176–2187. [Google Scholar] [CrossRef]
- Han, Y.; Li, Q.; Wang, F.; Wang, B.; Mizuno, K.; Zhou, Q. Analysis of pedestrian kinematics and ground impact in traffic accidents using video records. Int. J. Crashworthiness 2019, 24, 211–220. [Google Scholar] [CrossRef]
- Li, G.; Lyons, M.; Wang, B.; Yang, J.; Otte, D.; Simms, C. The influence of passenger car front shape on pedestrian injury risk observed from German in-depth accident data. Accid. Anal. Prev. 2017, 101, 11–21. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Wang, F.; Wang, B.; Li, G.; Li, F. A Computational Biomechanics Human Body Model Coupling Finite Element and Multibody Segments for Assessment of Head/Brain Injuries in Car-To-Pedestrian Collisions. Int. J. Environ. Res. Public Health 2020, 17, 492. [Google Scholar] [CrossRef] [PubMed]
- Oikawa, S.; Matsui, Y. Features of serious pedestrian injuries in vehicle-to-pedestrian accidents in Japan. Int. J. Crashworthiness 2016, 22, 202–213. [Google Scholar] [CrossRef]
- Zou, T.; Shang, S.; Simms, C. Potential benefits of controlled vehicle braking to reduce pedestrian ground contact injuries. Accid. Anal. Prev. 2019, 129, 94–107. [Google Scholar] [CrossRef]
- Liufu, K.; Liu, Q.; Lu, Y.; Chen, Z.; Zhang, Z.; Li, Q. Multi objective optimization on cooperative control of autonomous emergency steering and occupant restraint system for enhancing occupant safety. Accid. Anal. Prev. 2021, 159, 106302. [Google Scholar] [CrossRef]
- Choi, J.; Kim, K.; Yi, K. Emergency driving support algorithm with steering torque overlay and differential braking. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1433–1439. [Google Scholar]
- Zou, T.; Liu, Z.; Wang, D.; Chen, T.; Liu, L. Effectiveness evaluations and protecting for pedestrian ground contact injury by coupling the airbag and controlling vehicle braking. J. Automot. Saf. Energy 2022, 13, 438–445. [Google Scholar]
- Zou, T.F.; Zhu, Z.Z.; Xiao, J.; Liu, Q. A Vehicle Braking Control Method for Reducing Pedestrian⁃Ground Impact Injury. Automot. Eng. 2021, 43, 105–112. [Google Scholar]
- Zou, T.F.; Liu, Q.; Zhu, Z.Z.; Lin, H. Potential Benefits and Constraints of Reducing Ground Related Injury by Controlling Vehicle Braking in Real World Vehicle-pedestrian Accidents. J. Mech. Eng. 2021, 57, 266–276. [Google Scholar]
- Li, H.; Zheng, T.; Xia, F.; Gao, L.; Ye, Q.; Guo, Z. Emergency collision avoidance strategy for autonomous vehicles based on steering and differential braking. Sci. Rep. 2022, 12, 22647. [Google Scholar] [CrossRef]
- Kunitomi, S.; Takayama, S. Effect of pedestrian physique differences on head injury prediction in car-to-pedestrian accidents using deep learning. Traffic Inj. Prev. 2021, 22 (Suppl. S1), S82–S86. [Google Scholar] [CrossRef] [PubMed]
- Ellahi, A.; Gupta, S.; Bose, D.; Chanda, A. A high-fidelity biomechanical modeling framework for injury prediction during frontal car crash. Comput. Methods Biomech. Biomed. Eng. 2023, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Panday, P.; Vikram, A.; Chawla, A.; Mukherjee, S. Prediction of lower extremity injuries in car-pedestrian crashes—Real-world accident study. Traffic Inj. Prev. 2021, 22, 173–176. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.W.; Kim, J.H.; Kim, T.W. Prediction of neck injury using multiple linear regression and bumper damage: Case study for low-speed rear-end collisions. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 1643–1652. [Google Scholar] [CrossRef]
- Hu, J.; Flannagan, C.; Ganesan, S.; Bowman, P.; Sun, W.; Farooq, I.; Kalra, A.; Rupp, J. Understanding the new trends in pedestrian injury distribution and mechanism through data linkage and modeling. Accid. Anal. Prev. 2023, 188, 107095. [Google Scholar] [CrossRef]
- Li, G.; Liu, J.; Li, K.; Zhao, H.; Shi, L.; Zhang, S.; Nie, J. Realistic Reference for Evaluation of Vehicle Safety Focusing on Pedestrian Head Protection Observed from Kinematic Reconstruction of Real-World Collisions. Front. Bioeng. Biotechnol. 2021, 9, 768994. [Google Scholar] [CrossRef] [PubMed]
- Lei, F.; Lv, X.; Fang, J.; Pang, T.; Li, Q.; Sun, G. Injury biomechanics-based nondeterministic optimization of front-end structures for safety in pedestrian–vehicle impact. Thin Walled Struct. 2021, 167, 108087. [Google Scholar] [CrossRef]
- Cheng, R.; Pan, Y.; Xie, L. Analysis of Vehicle-Pedestrian Accident Risk Based on Simulation Experiments. Math. Probl. Eng. 2022, 2022, 7891232. [Google Scholar] [CrossRef]
- Jeffs, S.B.; Nolasco, L.A.; Petroskey, K.J. Predicting head injury metrics during low- to moderate-speed frontal collisions using computational simulations. Accid. Anal. Prev. 2023, 193, 107303. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| T1 | T2 | H2 | HIC | |
|---|---|---|---|---|
| HIC | −0.073 | −0.123 ** | 0.446 ** | 1 |
| Inflation Mass | H2 | T1 | T2 | HIC > 1000 (%) |
|---|---|---|---|---|
| Q1 | <1.8 | 23 | ||
| >1.8 | 135–185 | 160–200 | 14.8 | |
| Q2 | <1.8 | 3 | ||
| >1.8 | 160–185 | 160–200 | 22 | |
| Q3 | <1.8 | 6.67 | ||
| >1.8 | 160–185 | 180–200 | 33.33 | |
| Q4 | <1.8 | 10 | ||
| >1.8 | 160–185 | 180–200 | 33.33 | |
| Q5 | <1.8 | 6.67 | ||
| >1.8 | 160–185 | 100–160 | 16.67 |
| Inflation Value | Q1 | Q2 | Q3 | Q4 | Q5 | |
|---|---|---|---|---|---|---|
| Ratio | H | 477.75 | 703.69 | 727.85 | 730.8 | 697.66 |
| B1 | 1.46 | 2.86 | −0.3 | 1.35 | 4.59 | |
| B2 | −0.018 | −0.074 | 0.04 | −0.03 | −0.134 | |
| B3 | 1.37 × 104 | 6.7 × 104 | −4.3 × 104 | 2.36 × 104 | 1.14 × 104 | |
| Prediction function | HIC(Q) = H + B1X + B2X2 + B3X3 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, L.; Zhang, H.; Wu, L.; Liu, Y.; Cheng, K.; Han, Y.; Wang, D. A Hierarchical Prediction Method for Pedestrian Head Injury in Intelligent Vehicle with Combined Active and Passive Safety System. Biomimetics 2024, 9, 124. https://doi.org/10.3390/biomimetics9030124
Shi L, Zhang H, Wu L, Liu Y, Cheng K, Han Y, Wang D. A Hierarchical Prediction Method for Pedestrian Head Injury in Intelligent Vehicle with Combined Active and Passive Safety System. Biomimetics. 2024; 9(3):124. https://doi.org/10.3390/biomimetics9030124
Chicago/Turabian StyleShi, Liangliang, Honghao Zhang, Lintao Wu, Yu Liu, Kuo Cheng, Yong Han, and Danqi Wang. 2024. "A Hierarchical Prediction Method for Pedestrian Head Injury in Intelligent Vehicle with Combined Active and Passive Safety System" Biomimetics 9, no. 3: 124. https://doi.org/10.3390/biomimetics9030124
APA StyleShi, L., Zhang, H., Wu, L., Liu, Y., Cheng, K., Han, Y., & Wang, D. (2024). A Hierarchical Prediction Method for Pedestrian Head Injury in Intelligent Vehicle with Combined Active and Passive Safety System. Biomimetics, 9(3), 124. https://doi.org/10.3390/biomimetics9030124