1. Introduction
Achieving high-speed locomotion in robots poses a significant challenge in robotics, requiring mechanical designs that combine the necessary speed and strength for flight phases [
1]. This phase, crucial for achieving high speeds, demands not only sophisticated design and materials but also advanced control systems to manage dynamic balance and propulsion. The development of robots that mimic the biomechanics of real animals has garnered considerable interest in recent years, driven by their potential applications. Despite the vast number of robots designed globally, only a small proportion of quadruped robots have been constructed with a focus on tasks requiring running or galloping at high speeds. The endeavor to develop robots that can mimic the biomechanics of real animals has attracted significant interest, particularly over recent years. This surge in interest is largely attributed to the diverse potential applications of such robots, ranging from search and rescue operations in hazardous environments to exploratory missions in uncharted territories, where the agility and versatility of animal-like locomotion could offer unparalleled advantages [
2,
3].
Despite the global efforts to design and innovate within the robotics community, the creation of quadruped robots capable of executing tasks such as running or galloping at high speeds remains relatively rare. This scarcity is partly due to the complex interplay of factors required to replicate the efficient, high-speed locomotion observed in nature. Animals that excel in rapid movement, such as cheetahs or horses, have evolved highly specialized anatomical features and muscle structures that enable their impressive speed and agility. Replicating these features in robotic systems involves overcoming significant engineering challenges, including the development of lightweight yet robust materials, precise actuators, and sophisticated algorithms for motion planning and control [
3,
4]. Furthermore, high-speed locomotion in robots also requires advanced perception systems to navigate and adapt to varying terrains in real-time, a necessity for maintaining balance and direction at high velocities. The integration of these systems into a cohesive unit that can perform complex maneuvers at high speeds necessitates a multidisciplinary approach, drawing on insights from biomechanics, materials science, mechanical engineering, and computer science [
5].
Continued advancements in technology and design methodology are gradually closing the gap between robotic capabilities and the natural world’s benchmarks, setting the stage for a future where robots can move with the grace, speed, and agility of their biological counterparts. The evolution of quadruped robots designed for high-speed locomotion has been marked by significant advancements over the past two decades, as resumed in
Table 1. These developments, ranging from early prototypes with articulated legs and energy recoil systems to sophisticated models employing biarticular muscle concepts and Central Pattern Generators (CPGs), highlight the interdisciplinary efforts to mimic the efficient and agile movements of animals such as
Acinonyx jubatus.
Table 1 outlines key milestones in the field, including innovations in mechanical design, control strategies, and the implementation of neurobiologically inspired systems, illustrating the progress from Ohio State University’s initial attempts in 2001 to the remarkable speeds achieved by Boston Dynamics’ Wildcat in 2012 and the lightweight efficiency of the EPFL’s Cheetah-cub in 2013. Each entry in this table not only underscores the technical achievements but also points towards the increasing complexity and capability of quadruped robots in navigating and performing tasks in varied terrains at high speeds.
As shown in
Table 1, the development of quadruped robots has been an area of active research. The aim of such studies is focused on the reliable traversal of challenging, irregular terrain, which is beyond the capabilities of traditional wheeled mobile robots. Recent advancements in the design of high-performance actuators and hardware structures have led to developments and research in algorithms that mimic the movement patterns of quadrupeds.
Table 2 presents a summary of a study on the application of CPGs applied to legged locomotion [
12], exploring various techniques for pattern generation to emulate natural movements and overcome obstacles. It highlights the diverse applications of CPGs, from simple movement generation to more complex motion control involving feedback mechanisms and trajectory generation. The citations indicate the range of contributions made in these areas over the years, relating to both quadrupeds and CPG implementation.
The exploration of CPGs to model biomimetic locomotion in quadrupeds has seen an increase in studies tailored to bipedal, quadrupedal, and morphologically diverse reconfigurable systems. However, despite the advances made in the field, there remains an opportunity to refine CPG models to achieve more accurate mimetics of biological movement. The selection of CPGs, particularly those based on Wilson–Cowan neural networks, for the design of a quadruped robot inspired by the
Acinonyx jubatus is rooted in their demonstrated efficacy in replicating the nuanced patterns of animal gait, particularly in quadrupeds [
18,
19]. This preference is affirmed when compared to other neural control systems, like those based on reinforcement learning or artificial neural networks, which, although potent, might not naturally synchronize the inter-limb coordination required for steady reliable locomotion over a variety of terrains [
3,
20]. The Wilson–Cowan model, with its foundation in biological and theoretical neuroscience, provides a robust framework for capturing the continuous interplay of excitatory and inhibitory neural dynamics that characterize animal locomotion [
2,
20,
21]. This model’s adaptability is especially pertinent when programming the locomotion for terrains that demand high adaptability and fault tolerance, paralleling the capabilities of the
Acinonyx jubatus, which must adjust its gait and posture dynamically to maintain stability and speed. This work presents the design and development of a robot inspired by the
Acinonyx jubatus, applying a CPG based on Wilson–Cowan neural networks as introduced in [
18]. This study emphasizes the potential of CPGs to streamline the movement dynamics of robotic systems, further advancing the field by integrating complex neural network models for more agile and life-like robotic locomotion. By drawing inspiration from the rapid and efficient movement patterns of the
Acinonyx jubatus, the aim is to enhance robotic capabilities in terms of speed, stability, and adaptability across varied terrains, thereby bridging the gap between robotic and biological locomotion systems.
3. Results
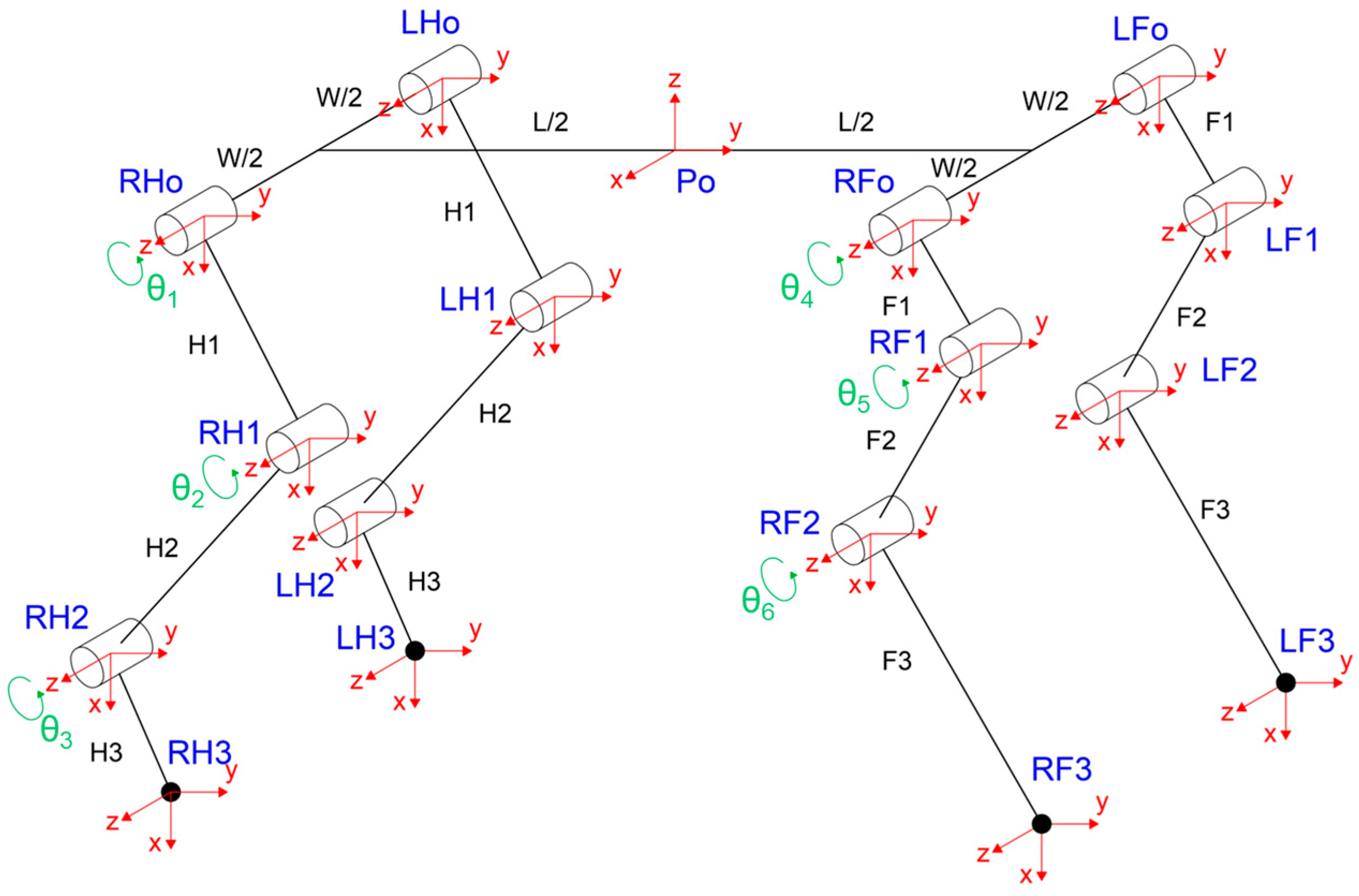
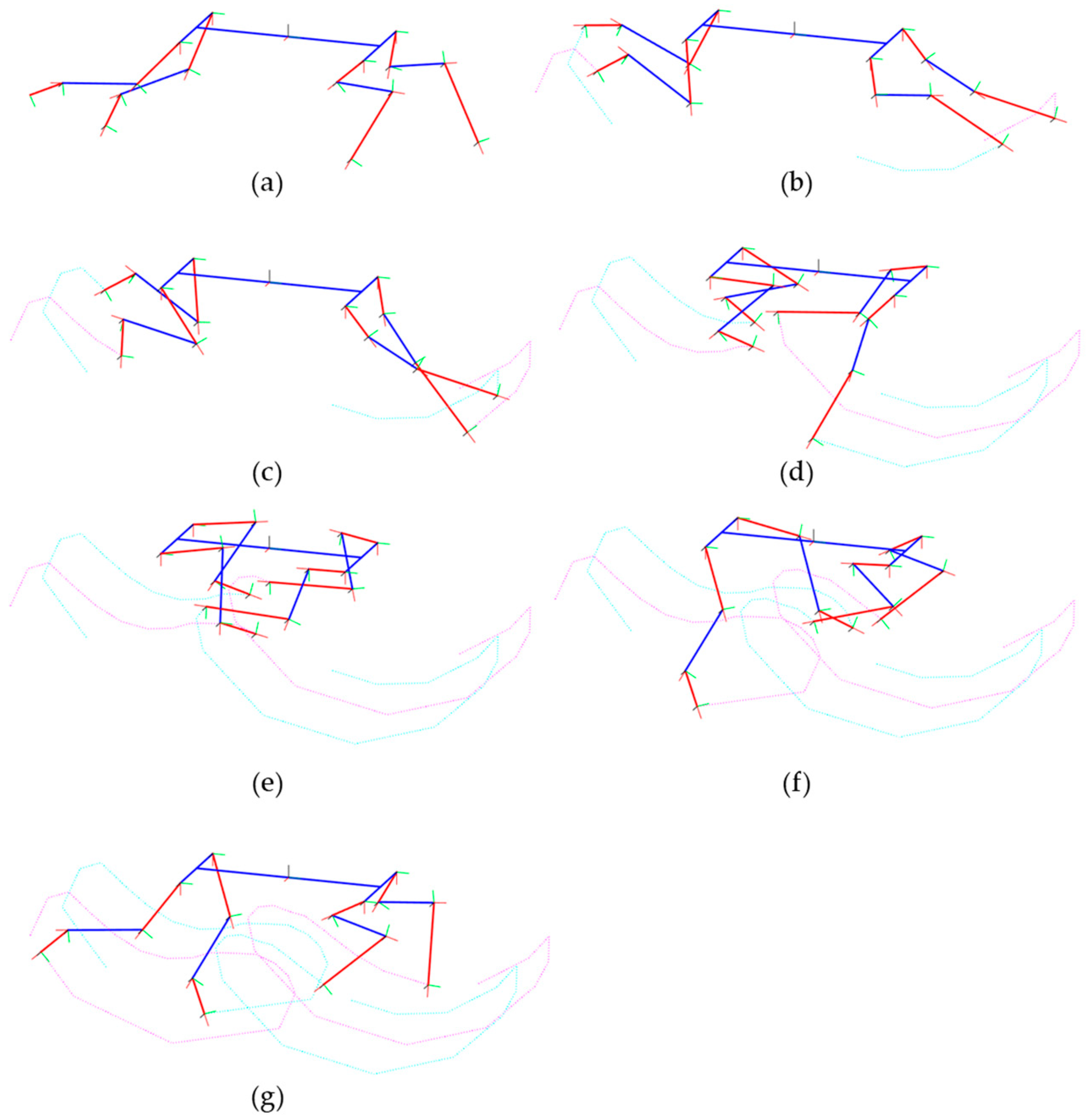
The quadruped robot’s walk, trot, and gallop were visualized by kinematics simulation using the previously established HTM. The simulation, depicted in
Figure 6, graphically represents the robot’s limbs and body using lines in blue and red to differentiate each segment. Additionally, coordinate systems are assigned to each joint and effector, allowing for an accurate depiction of their position and orientation. In
Figure 8, the simulation illustrates the quadruped robot during a gallop gait at selected intervals of the gait cycle. The figure highlights the paths followed by the limb effectors and the dynamic alignment of the segments.
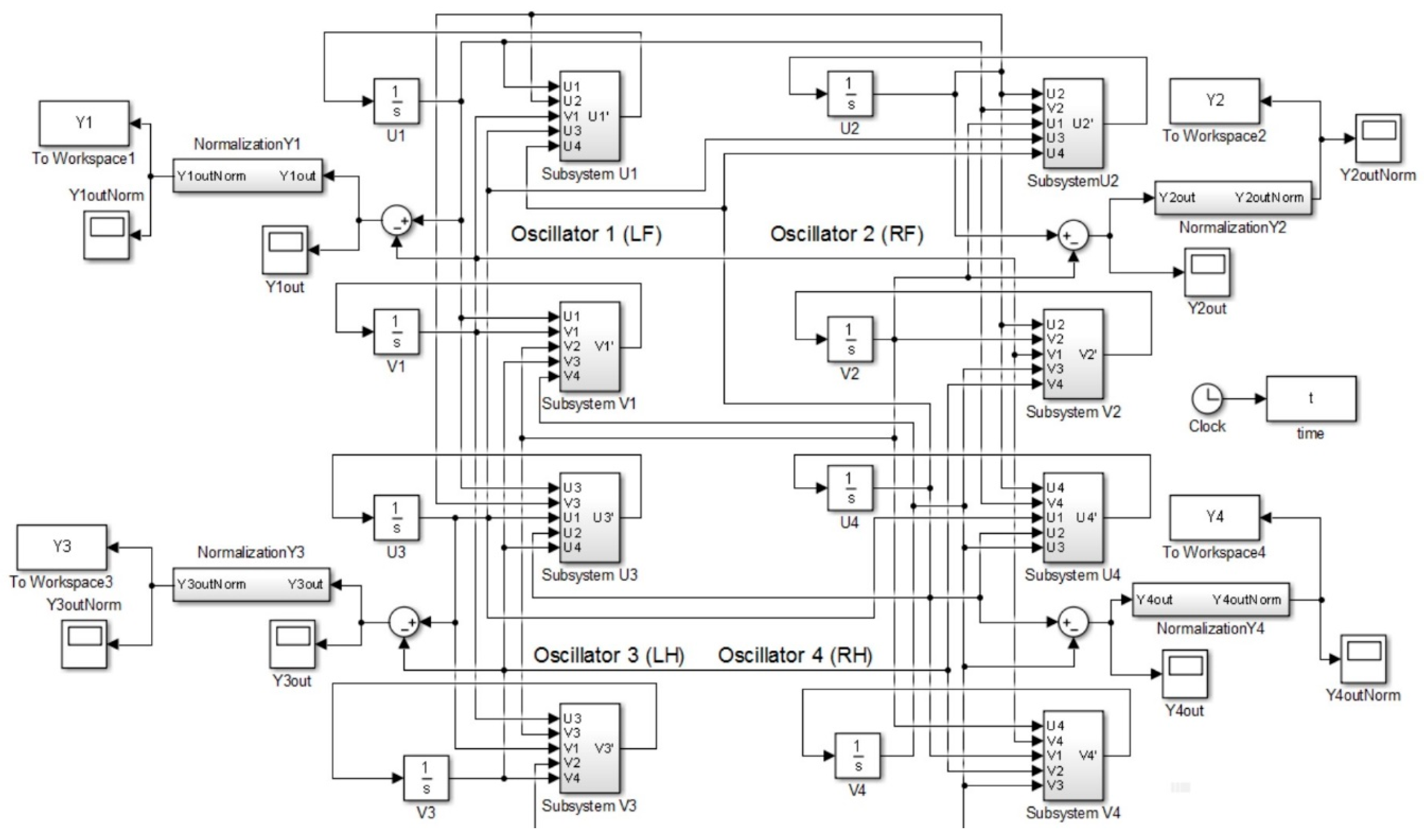
The simulation of the CPG controller is depicted in
Figure 7, including four neural oscillators, one for each limb: left forelimb (LF), right forelimb (RF), left hindlimb (LH), and right hindlimb (RH). These oscillators are tasked with solving the differential equations for the neuron activities U
i and V
i, with
i ranging from 1 to 4. The simulation illustrates how the oscillators are interconnected. The output Y
i of each oscillator is calculated as the difference between the activities U
i and V
i, and this output is subsequently normalized Y
iNorm to a predefined interval. The models presented in
Figure 9,
Figure 10,
Figure 11 and
Figure 12 were modeled in MATLAB Simulink 2021-b. This software platform facilitated the creation of dynamic system models, enabling the simulation and analysis of the complex interactions of the control algorithms that govern the robot’s behavior.
The U
i neuron subsystems are depicted in
Figure 8. This subsystem evaluates the transfer function outlined in Equations (4) and (5), incorporating the normalization parameter
μ and synaptic weights W
ij, along with constants a, b, Tu, and Su.
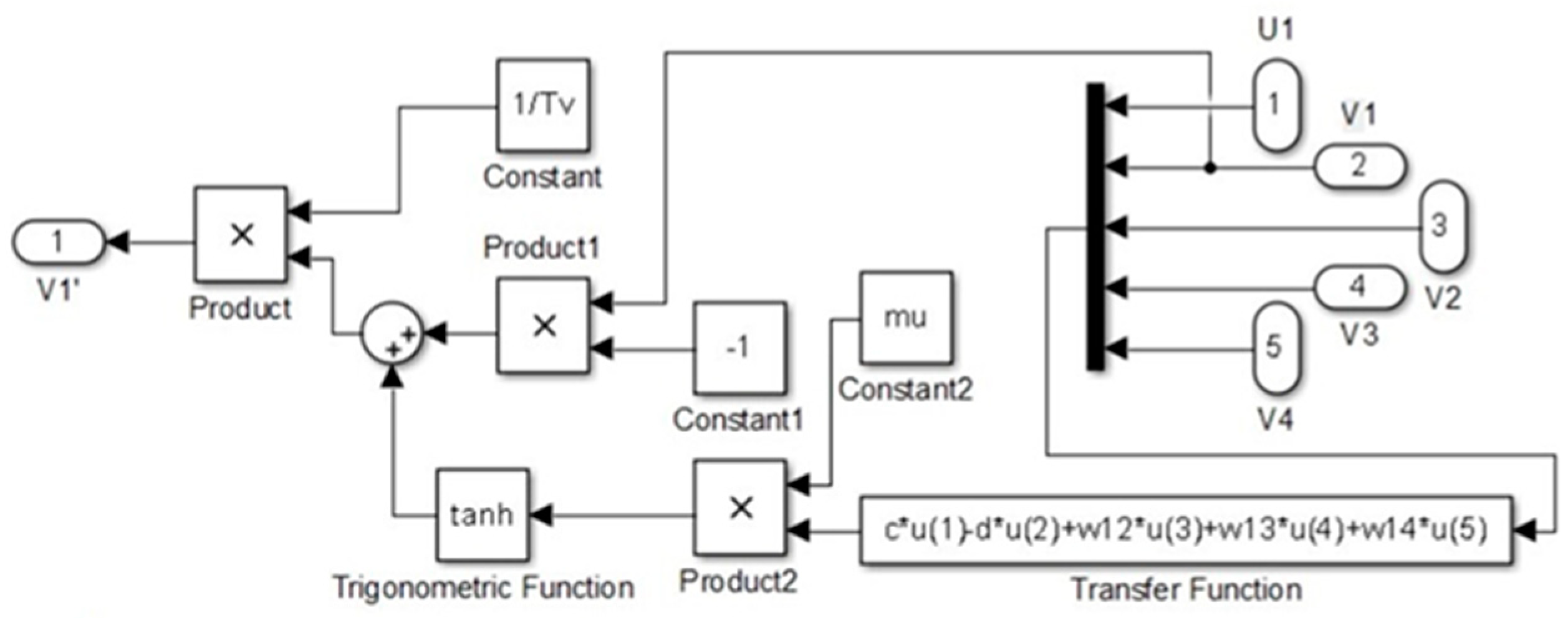
Conversely, in the V
i neuron subsystems, presented in
Figure 9, the inputs include signals V
i and U
i. The same transfer function is applied, also using
μ and W
ij, but with different constants c, d, Tv, and Sv.
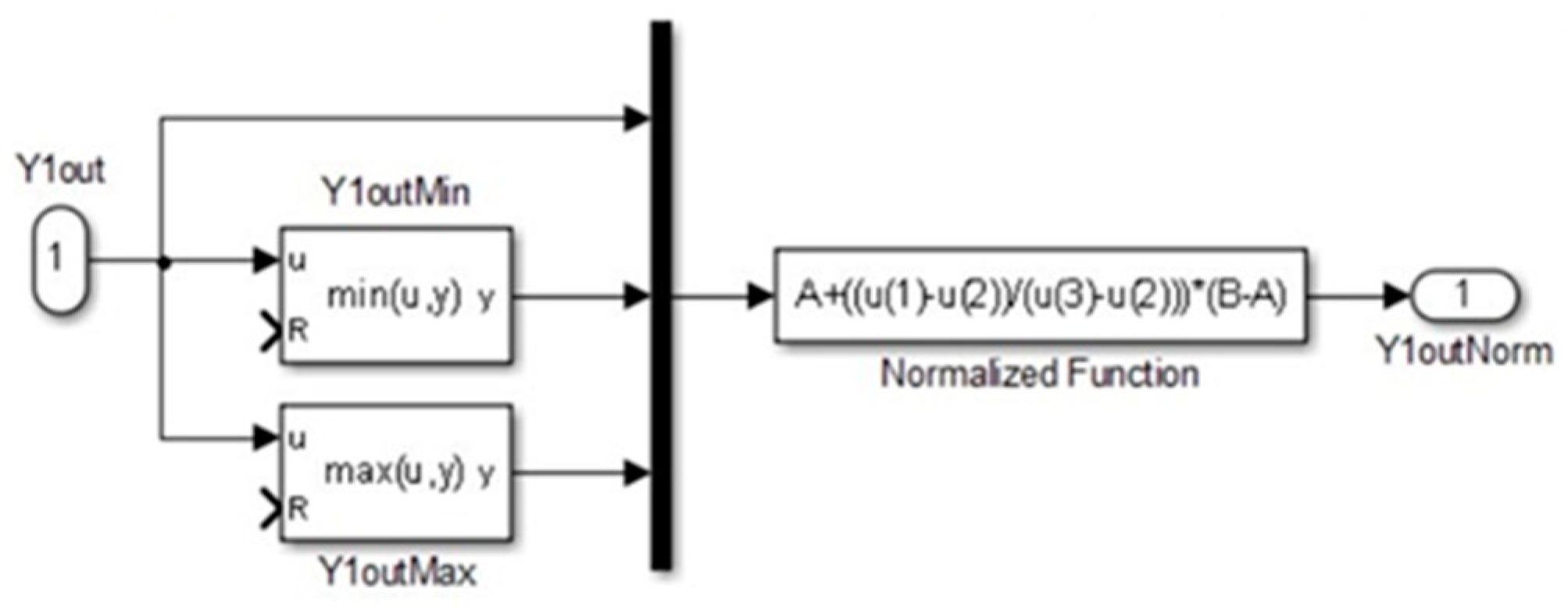
For normalizing the output signal Y
i (derived from the difference U
i–V
i, as illustrated in
Figure 10), the process involves determining the signal maximum and minimum values. The normalization function, as specified in Equation (10), is then applied to scale the output within a predefined range [A, B]. The differential equations central to the CPG model were resolved using the fourth-order Runge–Kutta integration method with a simulation step of 0.001 s. The simulation was set to a duration of 10 s with the following parameter settings: Tu = Tv = 0.2, a = 5.5, b = 5.5, c = 2.5 d = 0, Su = Sv = 0, and
μ = 0.5. By applying weight matrices W
ij for each gait as outlined in Equations (6)–(9), the model successfully generated the walking, trotting, pacing, and galloping gaits at the onset of the simulation.
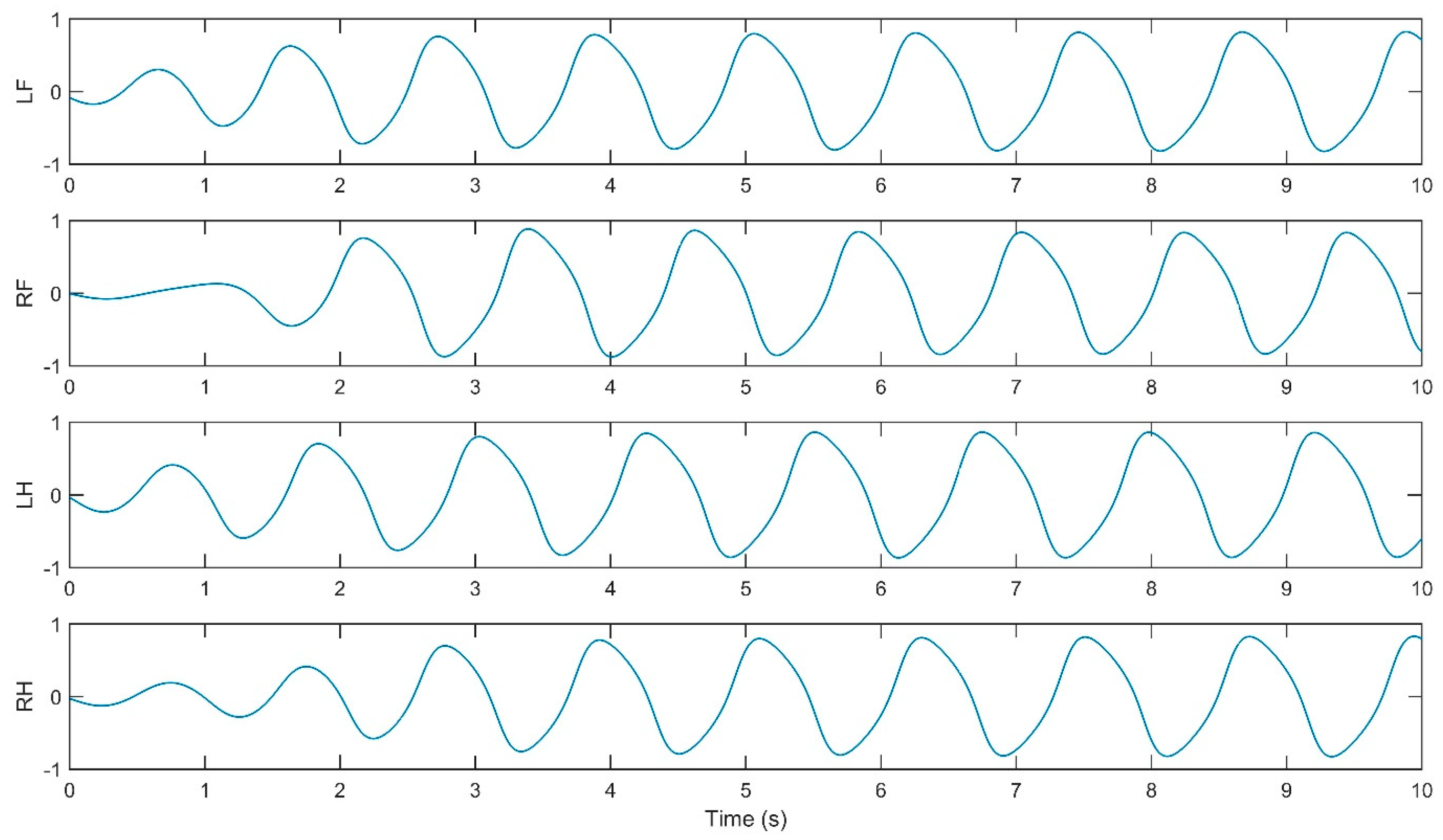
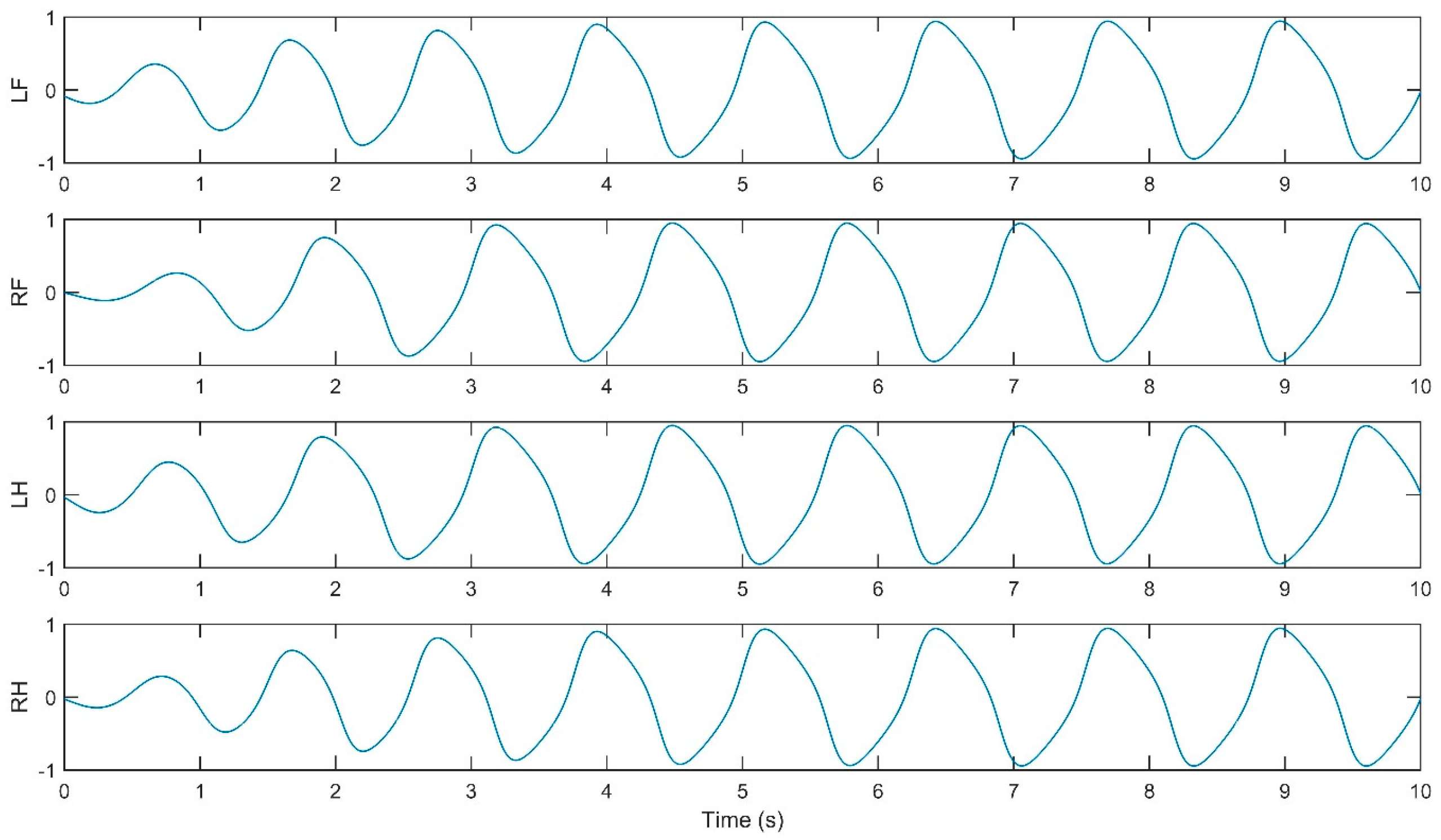
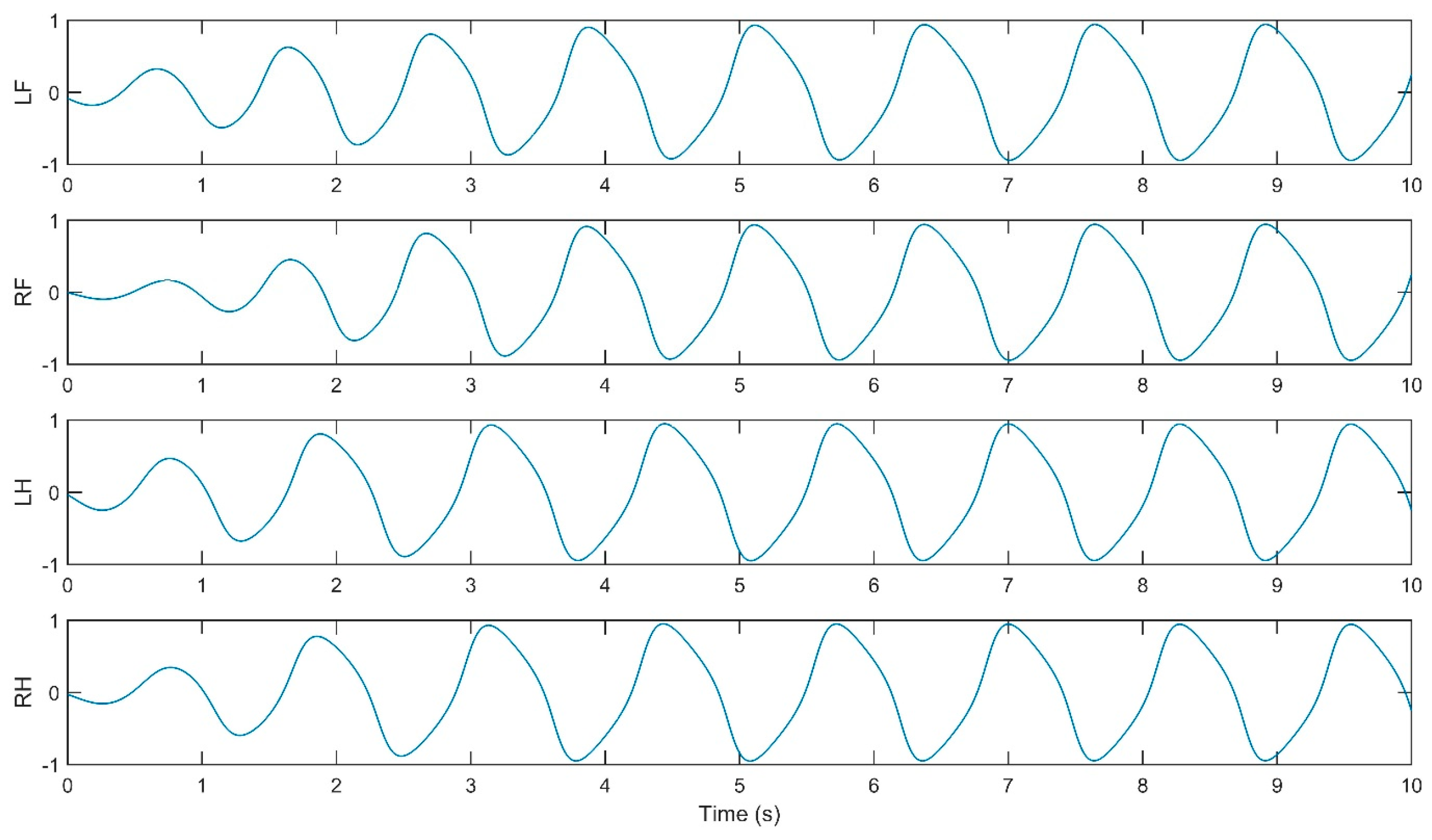
The simulation yielded oscillatory signals from the CPG for each of the quadruped’s legs (i.e., LF, RF, LH, RH), depicted in
Figure 11,
Figure 12,
Figure 13 and
Figure 14.
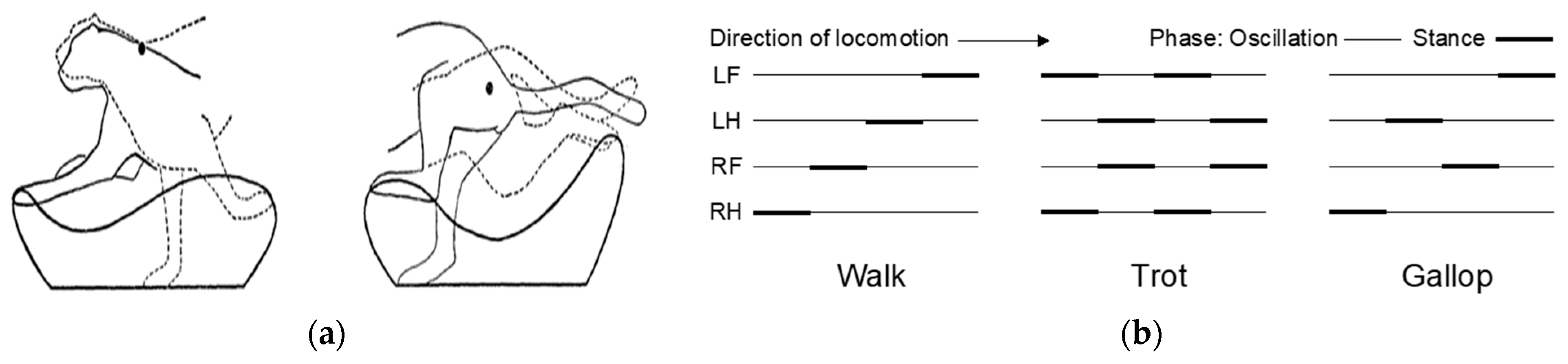
Figure 11 shows the walk gait signals, where an offset of a quarter cycle exists between the RF and LH signals and a half-cycle offset between the LH and LF signals (left side legs), as well as between the RF and RH signals (right side legs).
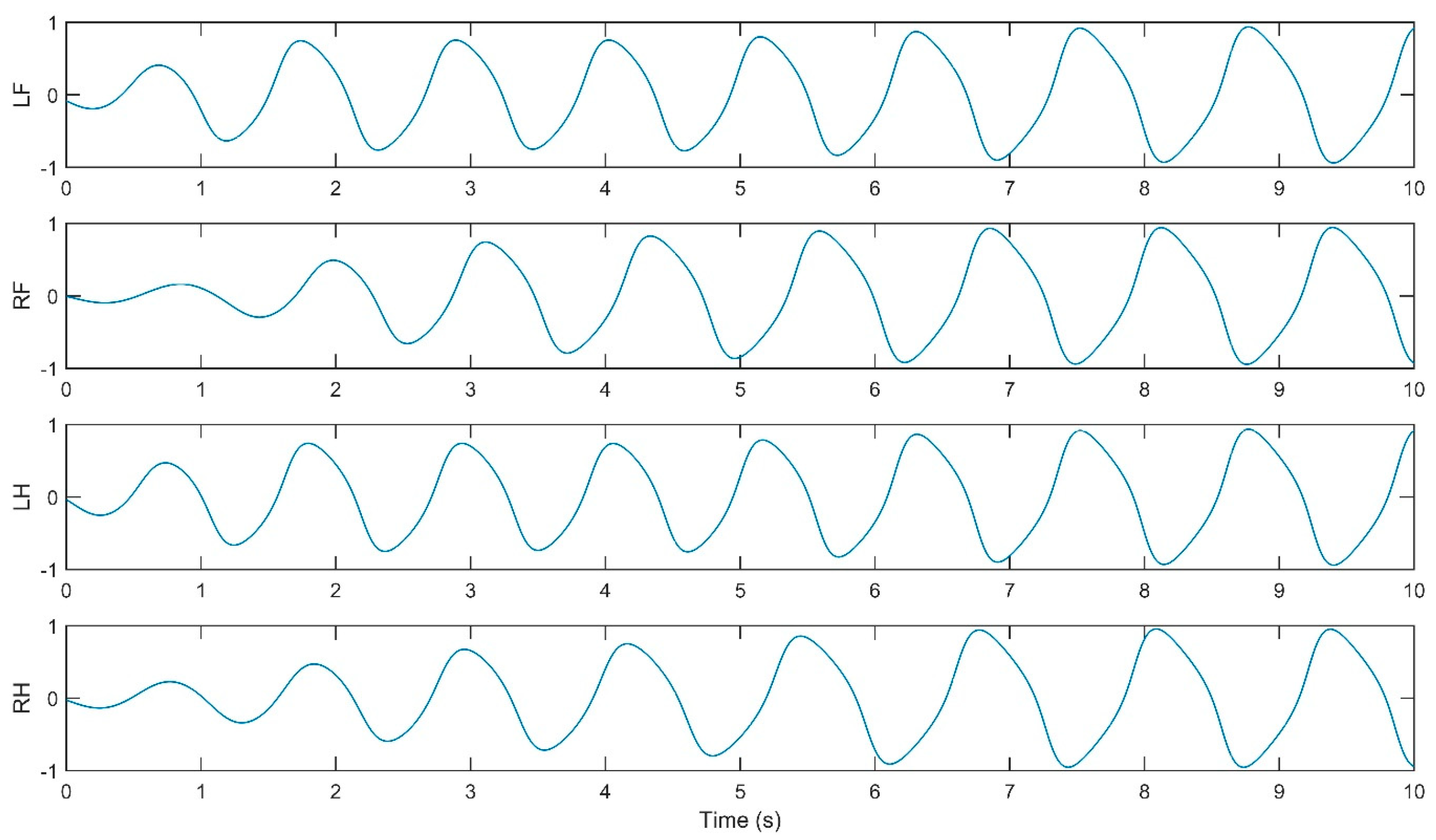
Figure 12 presents the trot gait for LH and LF signals closely aligned in phase, like the RF and RH signals, with a quarter-cycle offset between these two pairs.
Figure 13 presents the pace gait for when the LF and RH signals are synchronized, as are the RF and LH signals, with a half-cycle offset between these pairs. Lastly,
Figure 15 depicts the gallop gait, where the LF and RF signals (forelimbs) are in phase, mirroring the phase alignment of the LH and RH signals (hindlimbs), with a half-cycle offset between these two pairs of signals.
Figure 13,
Figure 14,
Figure 15 and
Figure 16 depict the cyclic activity of the CPG for the pace gait. The rhythmic oscillations showcase a synchronized pattern between the limbs on each side for lateral gait movements. Each limb’s CPG signal is in phase with its lateral counterpart while being anti-phase with the diagonally opposite limb, resulting in a movement that mirrors the natural pacing motion found in certain quadrupedal animals. The CPG model supports these rhythmic patterns on the principles of neural oscillations described by Wilson–Cowan. The parameters within the weight matrix
Wwalk,
Wtrot,
Wpace,
Wgallop were derived to ensure the output signals from the CPG would align with the observations of the biological rhythms, presented by Li, B., Li, Y., and Rong, X. [
20]. The quadruped limbs, thus, exhibit a pace gait that closely resembles the cheetah’s locomotion, displaying the smooth side-to-side movements essential for high-speed maneuvering.
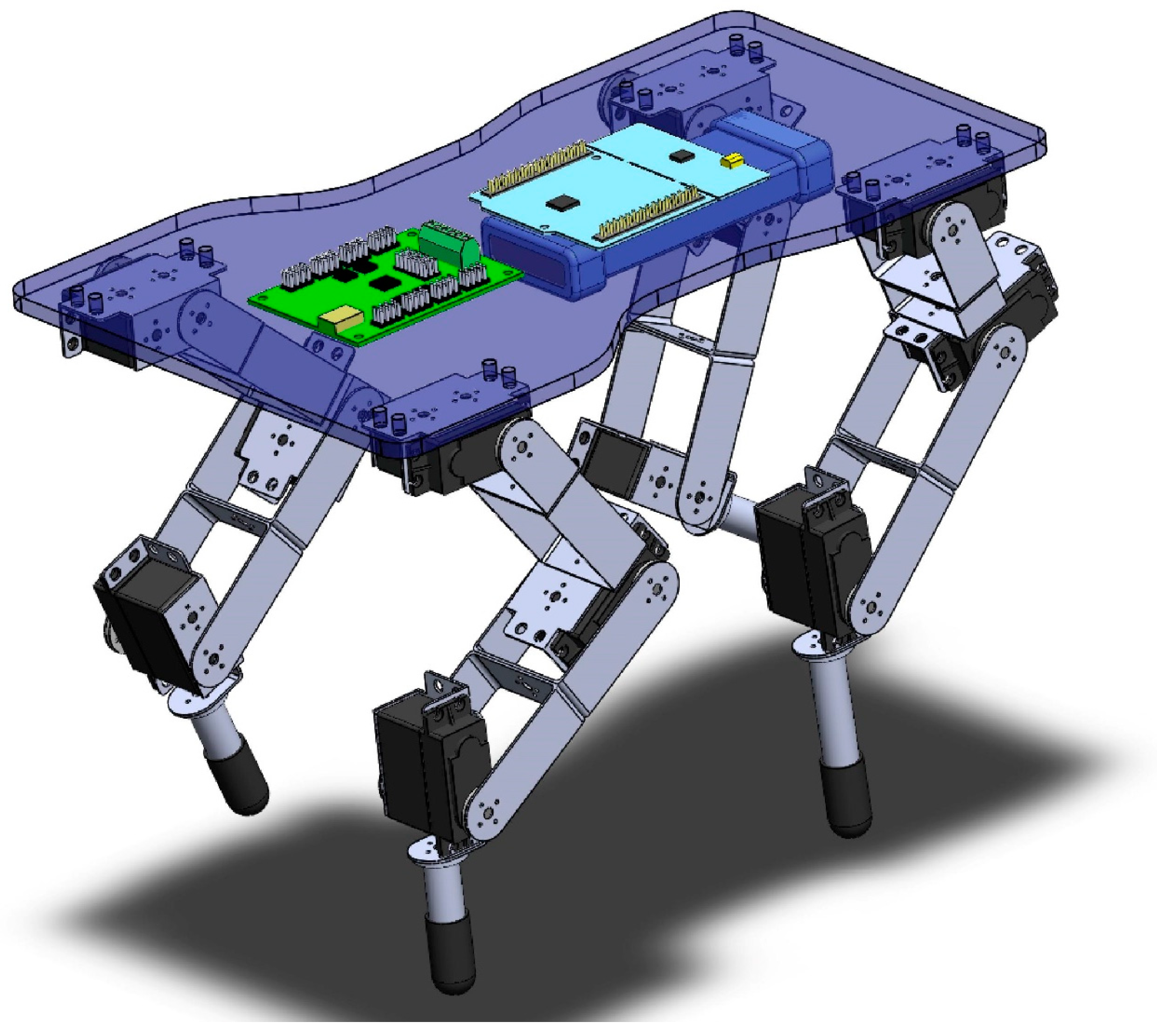
The mechanical design of the robot was modeled at a 1:3 scale of a real cheetah. This scale was selected to balance the proportional accuracy essential for simulating the cheetah’s movement with the practical feasibility of construction and component integration. This scale aids in the replication of biomechanical functions, including speed and agility, within the confines of technical and material limitations. The success of this scaling strategy was further validated by simulation and testing results, which demonstrate the robot’s capability to emulate the cheetah’s distinctive locomotion patterns.
Table 4 provides the measured values of the robot segments. The design of the robot features a chassis that is wider at the back than at the front to prevent limb collision. The prototype was equipped with 12 servomotors. Brackets were used to support the servomotors and to form the joints, while links represent the segments of the robot. Additionally, cylindrical tubes with a rubber covering were used as effectors, as presented in
Figure 17.
The simulation of the prototype movement across various gaits was carried out in a virtual environment. Physical material properties were considered, such as mass, center of mass, and moment of inertia.
Figure 18 presents the movement simulation throughout the gait cycle, highlighting the centers of mass for each limb segment. During the simulation, all parts of the robot were treated as rigid bodies with the chassis grounded at the origin, and factors such as frictional interactions with the ground were not considered for simulation simplification.
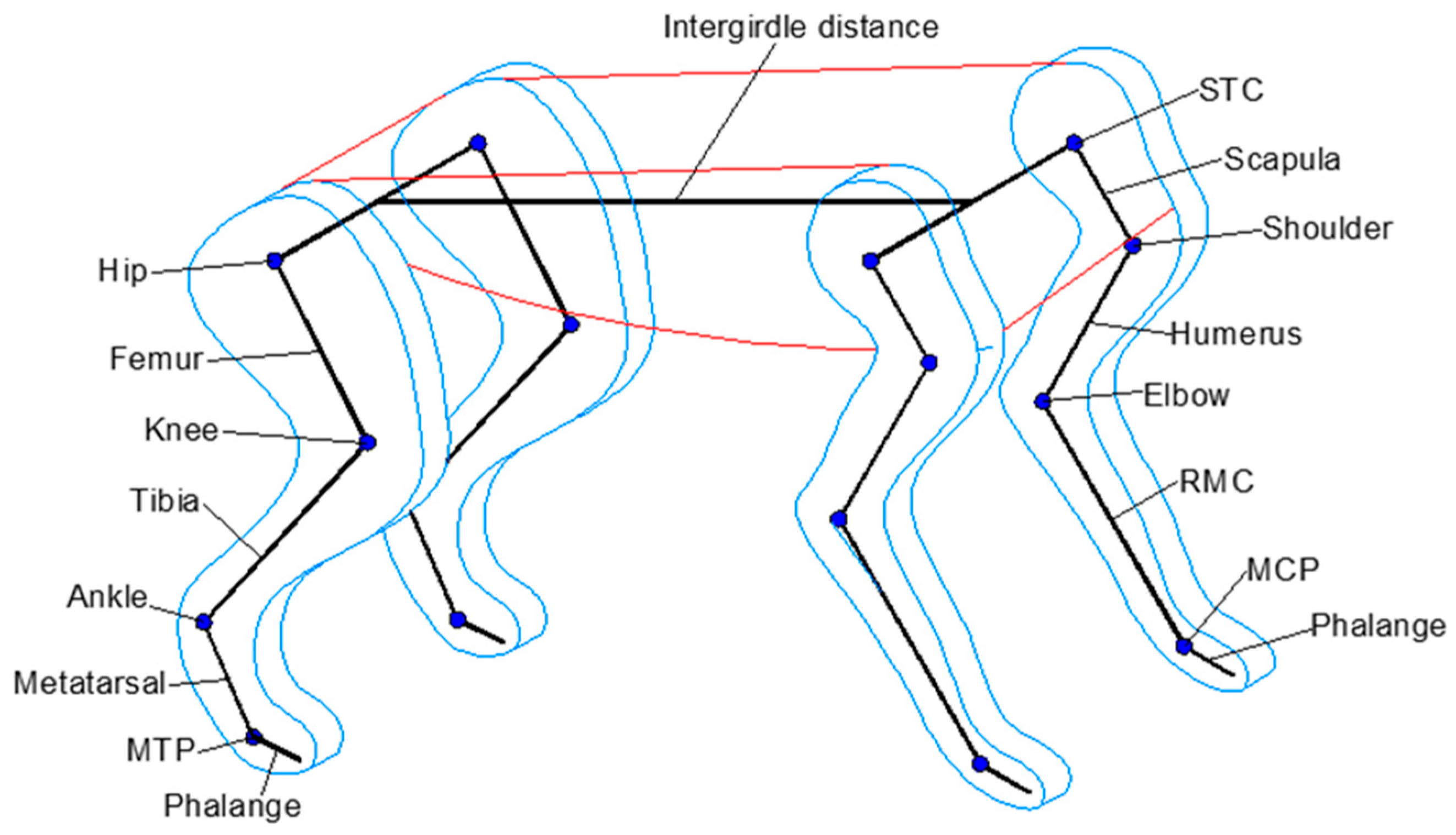
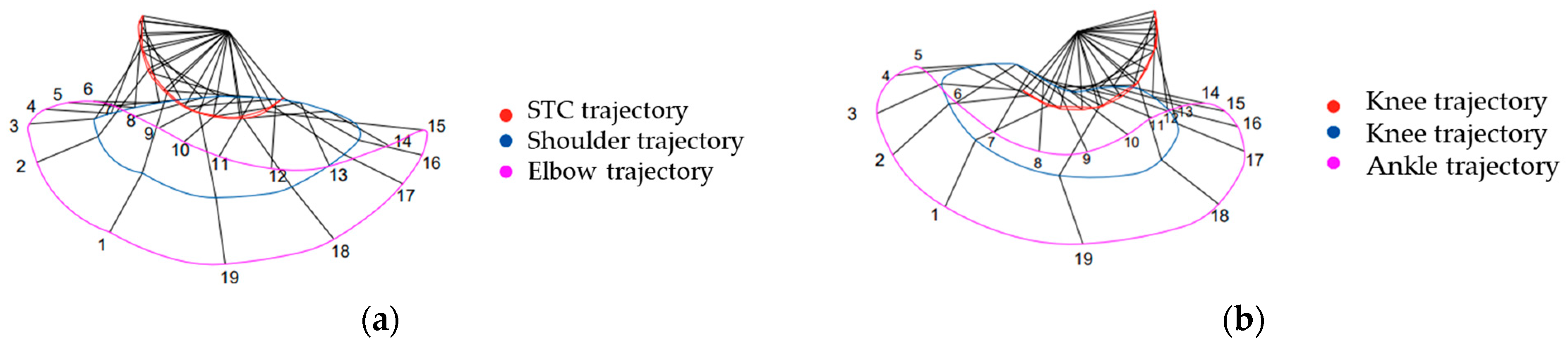
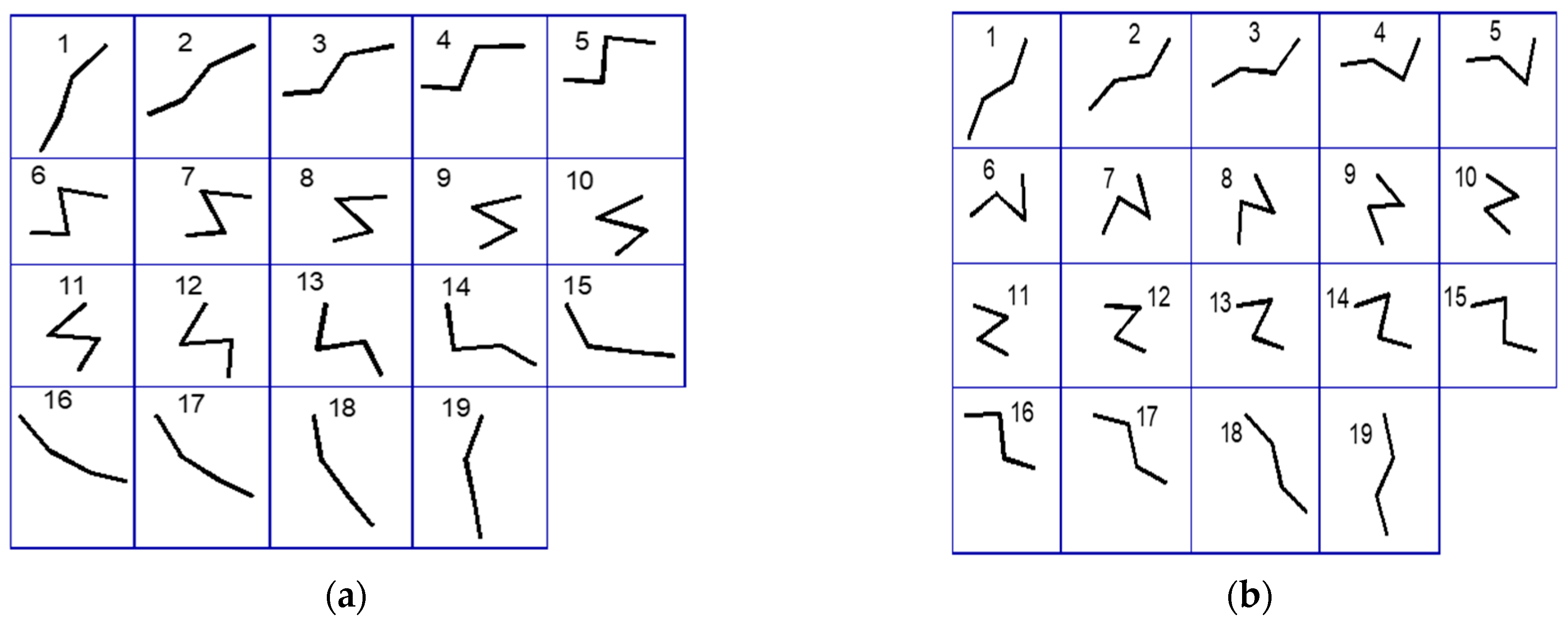
To determine the angular positions and trajectories of the limbs during the gait cycle, a video capturing the robot’s movement was recorded, using blue markers placed on the joints and effectors of the limbs. Eleven key frames were extracted from the video at various time intervals. Using image processing techniques, the angles formed with the horizontal plane of the chassis were measured for each frame, allowing for the determination of the angular positions of the STC, shoulder, and elbow joints for the forelimb, as well as the hip, knee, and ankle joints for the hindlimb. Similarly, the trajectories described by the effectors were traced for the forelimb (indicated by a red line) and the hindlimb (indicated by a blue line). These trajectory curves were plotted using spline interpolation to create smooth and continuous paths. The limb trajectories form elongated, semi-circular closed curves with a small intersecting region in the center, as illustrated in
Figure 19. This detailed analysis provides valuable insights into the mechanical performance and movement efficiency of the robot’s limbs during locomotion.
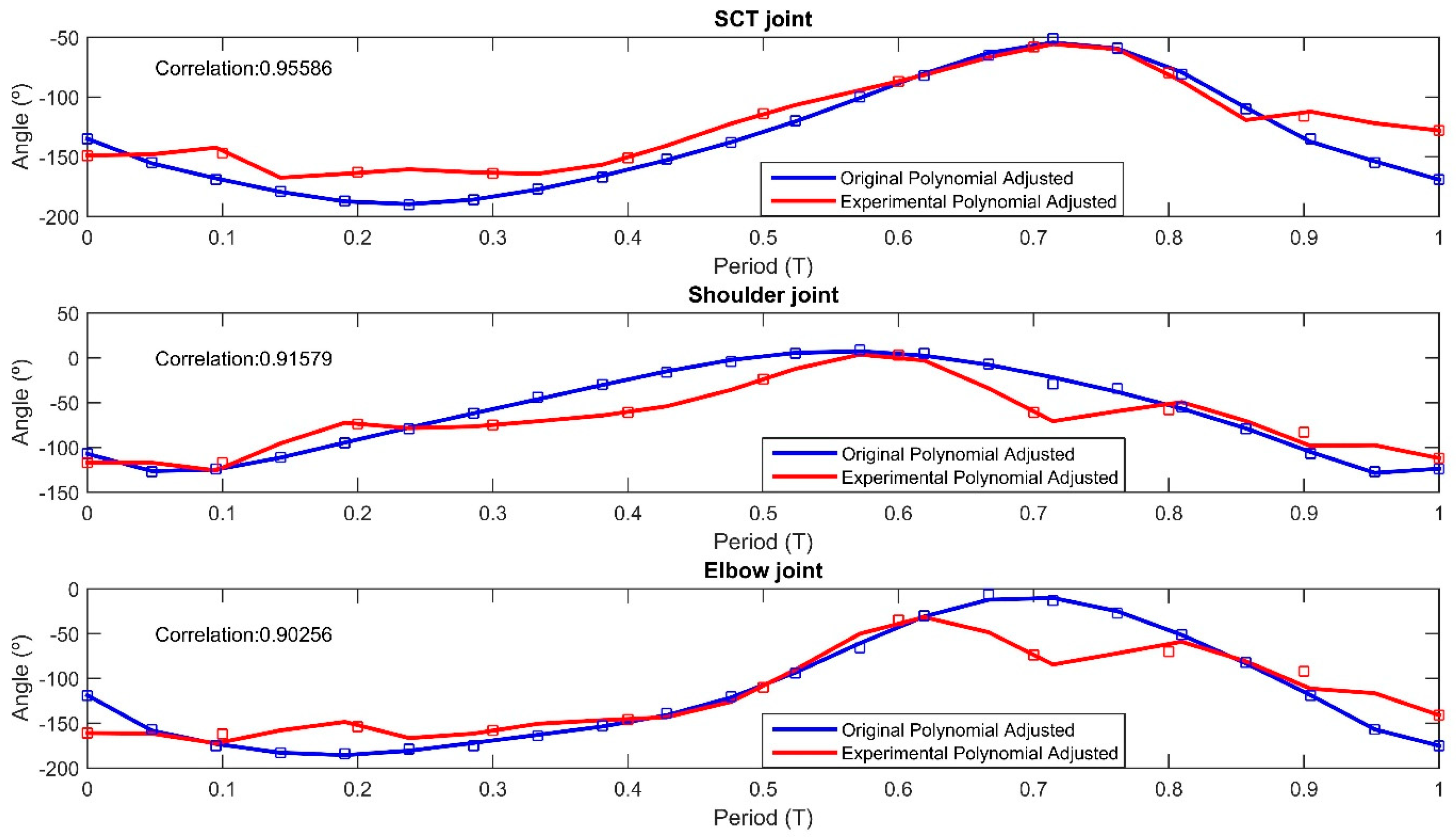
Comparative graphs were created to compare the theoretical and experimental angular positions of the forelimb and hindlimb joints.
Figure 20 presents the angular positions for the STC, shoulder, and elbow joints of the forelimb throughout the gait cycle, with the theoretical data displayed in blue and the experimental data in red. The theoretical graph was plotted using 22 angular positions, while the experimental graph utilized 11 positions. For both datasets, a 10th-degree polynomial was fitted, yielding correlation values of 0.9558 for the STC joint, 0.9157 for the shoulder joint, and 0.9025 for the elbow joint.
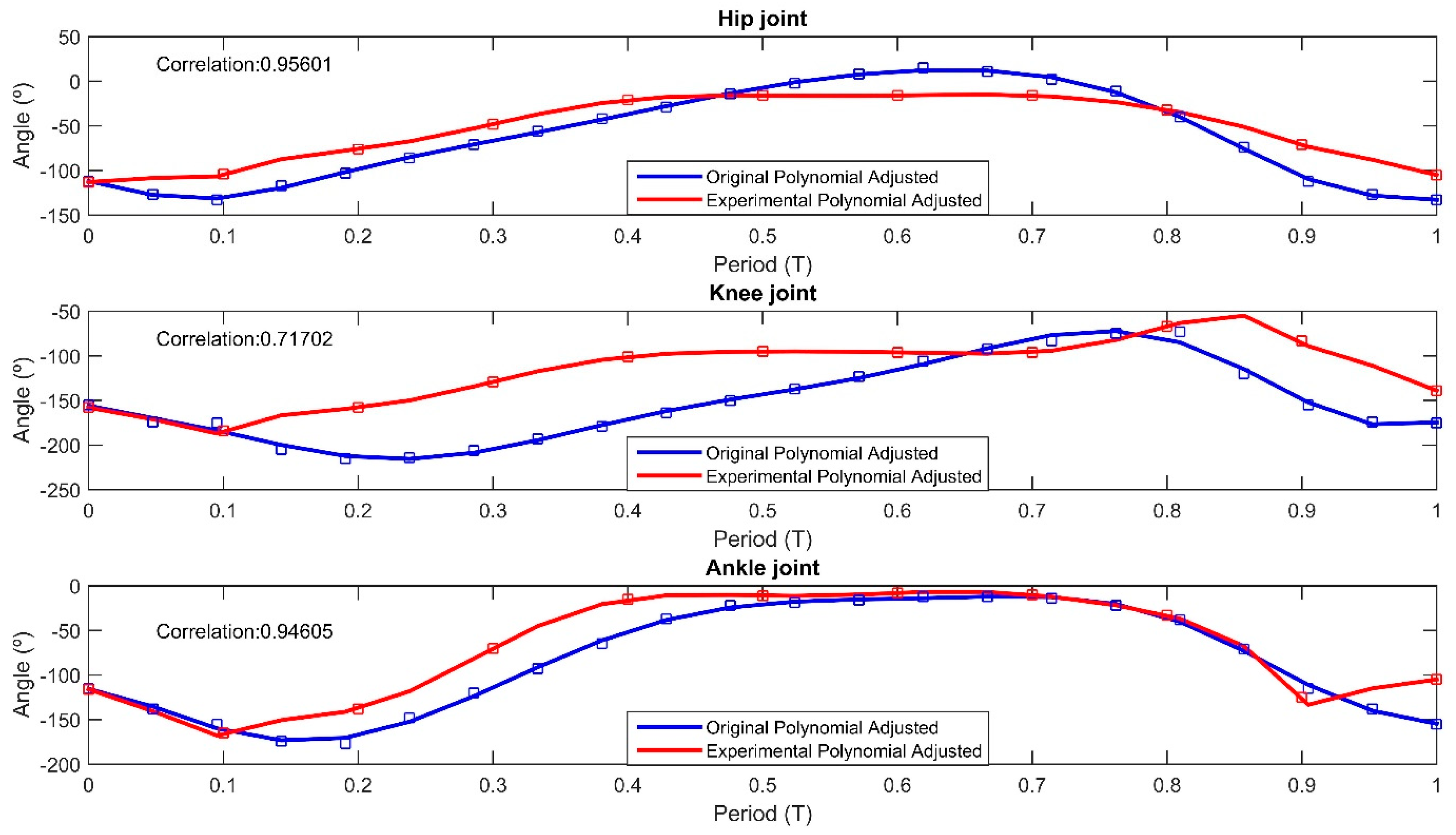
Figure 19 presents the angular positions of the hip, knee, and ankle joints for the hindlimb during the gait cycle. The correlation results were 0.9560 for the hip joint, 0.7071 for the knee joint, and 0.9460 for the ankle joint, indicating the degree of alignment between the experimental observations and the theoretical model.
Figure 20 and
Figure 21 address the comparison between the quadruped movements and the theoretical model, correlating between the computed angles and those captured by computer vision, depicted as contours in red and blue in
Figure 19. This visual alignment underscores the accuracy of our prototype to biomimetic principles that guided its design. The contours in
Figure 19 represent trajectories, while the prototype’s movements reflect these paths confirming the emulation of natural locomotion. To provide a clear, quantitative perspective, we compared theoretical and computer vision-derived empirical data, showcasing the high correlation in
Figure 20 and
Figure 21.
In the development of the
Acinonyx jubatus prototype, attention was given to the selection of materials and components to achieve a design that was not only robust but also lightweight, factors which are critical in replicating the agility and efficiency of the quadruped movement. This is evident in the results depicted in
Figure 18 and
Figure 19, where the kinematic performance of the robot aligns closely with the modeled predictions. The use of 12 Power HD-1501MG servomotors, characterized by their 17 kg-cm (approximately 235.4 oz-in) torque and 0.14 s per 60 degrees of motion response, served as the actuators. These motors enable the prototype to execute movements with the necessary force and precision while maintaining a swift and fluid motion. The integration of two mainboards, an SSC32 for servomotor control and a Nucleo STM32 for algorithm implementation, forms the control system. These boards, mounted atop the chassis, work in unison to process and execute the control algorithms that drive the robotic limbs through their naturalistic gait cycles. The power efficiency is further optimized by the 7.2 V LiPo battery, which supplies energy without contributing excessive weight, ensuring the robot’s movements remain dynamic and energy-efficient. The completed prototype, depicted in
Figure 22, measures 35.5 cm in length, 21 cm in width at the rear, 17 cm in width at the front, and stands 27 cm tall. The overall weight of the robot is approximately 2.1 kg, as presented in
Figure 20.
4. Discussion
The design and construction of a 1:3-scale Acinonyx jubatus quadruped robot prototype showcase significant advancements in bio-inspired robotics. The choice of scale ensured a balance between biomechanical accuracy and the feasibility of incorporating components and materials, ultimately allowing for a faithful emulation of the Acinonyx jubatus’ movements. The experimental validation of the prototype movements, using image processing, provided key insights into the biomechanical design. The close correlation between the theoretical and experimental angular positions of the limb joints suggests that the kinematic model is robust and can accurately predict the physical behavior of the robot’s limbs during different gaits.
The choice of the Wilson–Cowan model over alternative neural network models is justified by the capability to coordinate complex motor movements through rhythmic patterns that are inherently synchronous. Such synchronization is critical for maintaining stability and continuity in the locomotion of quadruped robots across varied and unpredictable terrains. Furthermore, the Wilson–Cowan framework’s adaptability allows for the fine-tuning of parameters to suit specific locomotive tasks. This is critical in applications where the robot must navigate through challenging terrains, adjusting its gait in response to environmental stimuli, much like its biological counterparts. The Wilson–Cowan model provides a foundation for such adaptations, as they are derived from empirical observations of neural behavior in a wide range of species. Nevertheless, the CPG model was based on a review of the literature, where we identified a need for control strategies that extend mechanical mimicking, exploring neuromechanical synchrony. The Wilson–Cowan model has been shown to be particularly effective in capturing the essence of animal locomotion, enabling the design of robots that can execute complex movements such as pacing and galloping with more biological accuracy. The implementation of this model illustrates not only the fidelity of our prototype’s movements to natural gait patterns but also highlights the model’s utility in robotic capabilities in terms of adaptability and efficiency across various terrains. The reliability of the quadruped gait patterns to those of the
Acinonyx jubatus may be achieved through a combination of material selection and control algorithms. The congruence between simulated and actual joint angles, as illustrated in
Figure 18 and
Figure 19, quantitatively supports the effectiveness of the design parameters. The use of Power HD-1501MG servomotors, with a torque output of 17 kg-cm and a swift response time of 0.14 s per 60-degree rotation, contributed to the prototype’s dynamic capabilities. Nevertheless, the use of aluminum and acrylic in the robot’s structure may offer a balance between mechanical resilience and mass efficiency, facilitating agility and strength in locomotion. However, some limitations were noted. The absence of ground interaction, such as friction forces, in the simulations suggests that further work is required to understand how the robot would perform in a real-world environment. The observed discrepancies in correlation values, particularly at the knee joint during the hindlimb movement, indicate potential areas for refinement in either the physical construction or the kinematic modeling of the robot. The implementation of Wilson–Cowan neural oscillators in the control strategy has been validated as a successful approach to mimicking natural gait patterns. Future iterations of this research may focus on enhancing the control algorithm to adjust for real-time feedback and environmental interactions, which would likely improve the adaptability and stability of the robot’s movements. Overall, the results obtained from the design, simulations, and experimental processes demonstrate promising progress towards achieving a robotic platform that can replicate the unique locomotive characteristics of the cheetah. With further development and refinement, such robots have the potential to revolutionize fields requiring rapid and flexible movement across varied terrains.
From a social impact point of view, the application of biomimetic quadruped robots in search-and-rescue operations exemplifies a significant potential beyond academic research. These kinds of quadruped robots, which are outfitted with advanced sensors and imaging technology, are designed to navigate through dangerous areas and handle unstable surfaces. This makes it possible for them to carry out essential tasks like searching through fields of destruction left behind by natural catastrophes, using thermal imaging to find missing people, and securely transporting supplies. Their design allows them to adapt to a variety of environmental circumstances, guaranteeing operational efficacy in situations where human teams are exposed to significant hazards. In this manner, these robots improve rescue operations while putting the security of human responders first [
33,
34]. Another relevant application in environmental monitoring is that biomimetic quadruped robots can access areas that are otherwise challenging for human researchers or traditional machinery. With the help of environmental sensors, these robots monitor animals, collect essential ecological data, and measure the quality of the air and water, all of which contribute to conservation and sustainability efforts [
35,
36,
37].
The development of a biomimetic quadruped robot illustrates the critical importance of interdisciplinary collaboration in tackling complex technological challenges. Specialists from robotics, biomechanics, and computer science each played pivotal roles. Robotics engineers designed mechanical and electrical systems to mimic biological movements accurately, while biomechanical experts refined motion algorithms to ensure the genuine replication of natural gaits. Computer scientists developed adaptive control systems using neural networks and machine learning, enabling the robot to perform autonomously across diverse environments. This collaborative effort not only showcased the complexity required for such innovative projects but also set a precedent for future technological endeavors [
36,
38].
By including these applications in our discussion, we aim to raise awareness of biomimetic quadruped robots and highlight their potential uses in a variety of fields, such as environmental conservation and emergency response.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}