
Fabrication and Characterization of Graphene–Mesoporous Carbon–Nickel–Poly(Vinyl Alcohol)-Coated Mandrel-Coiled TCPFLNR Artificial Muscle



Abstract
:1. Introduction
- (i)
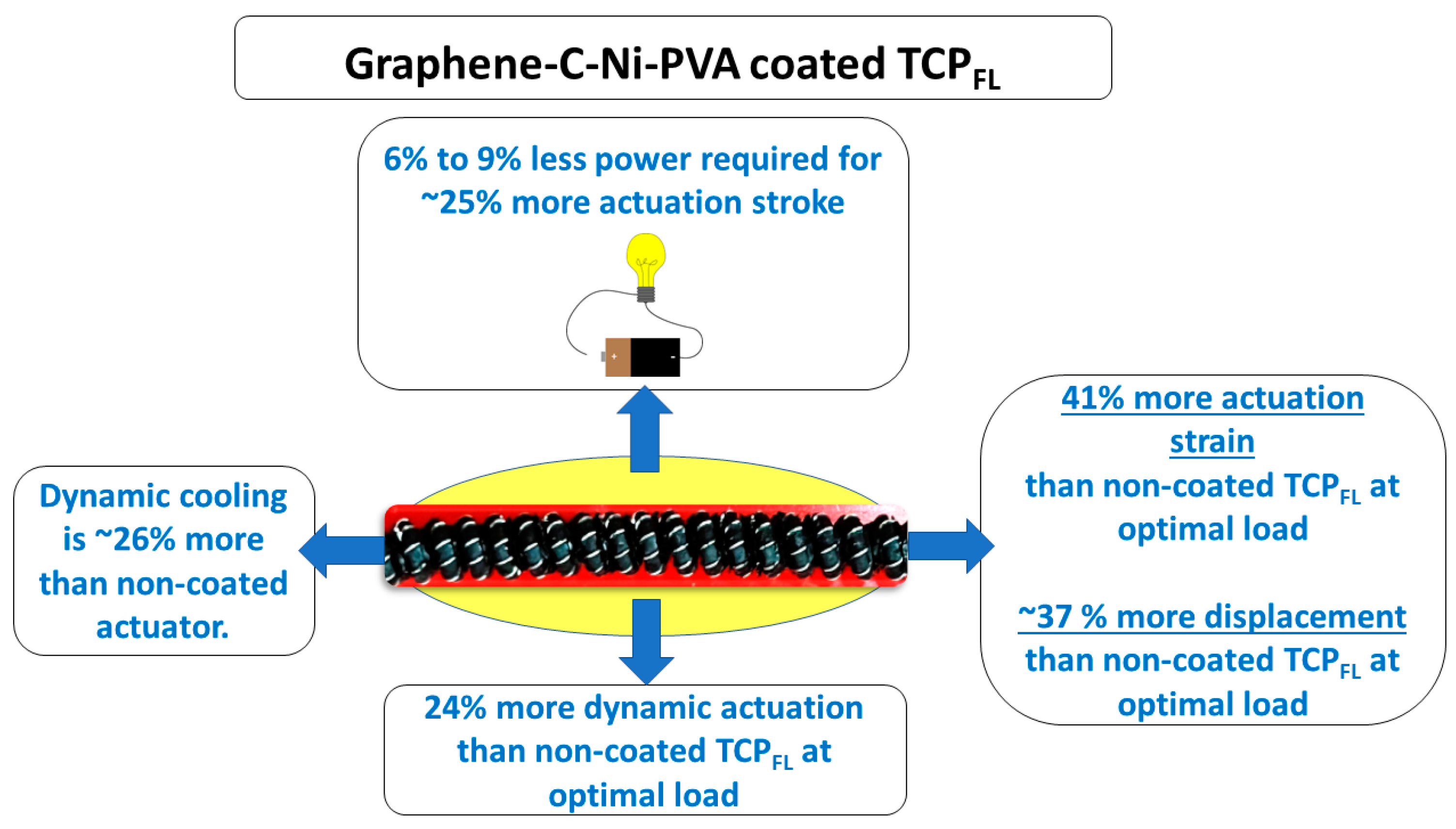
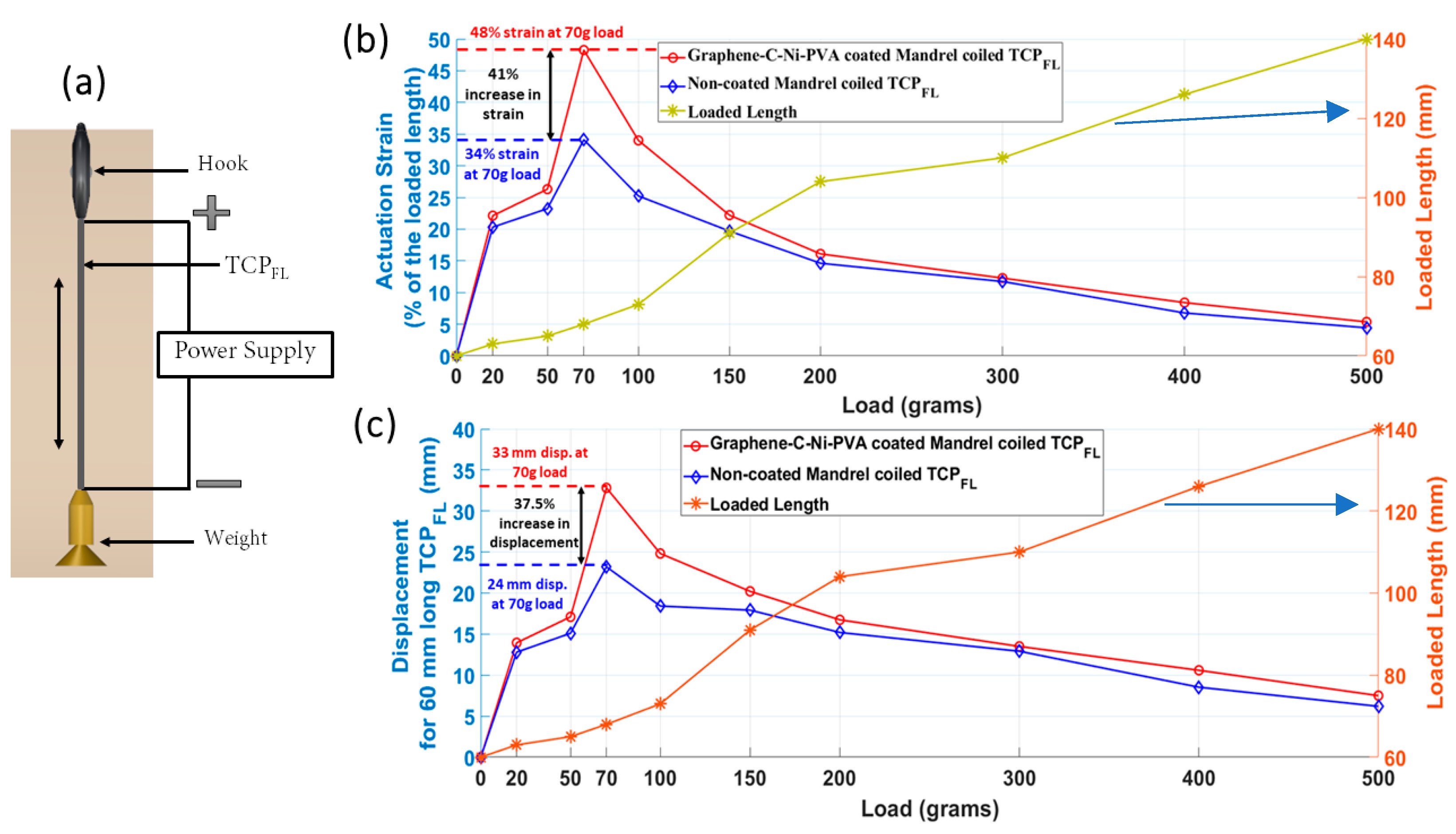
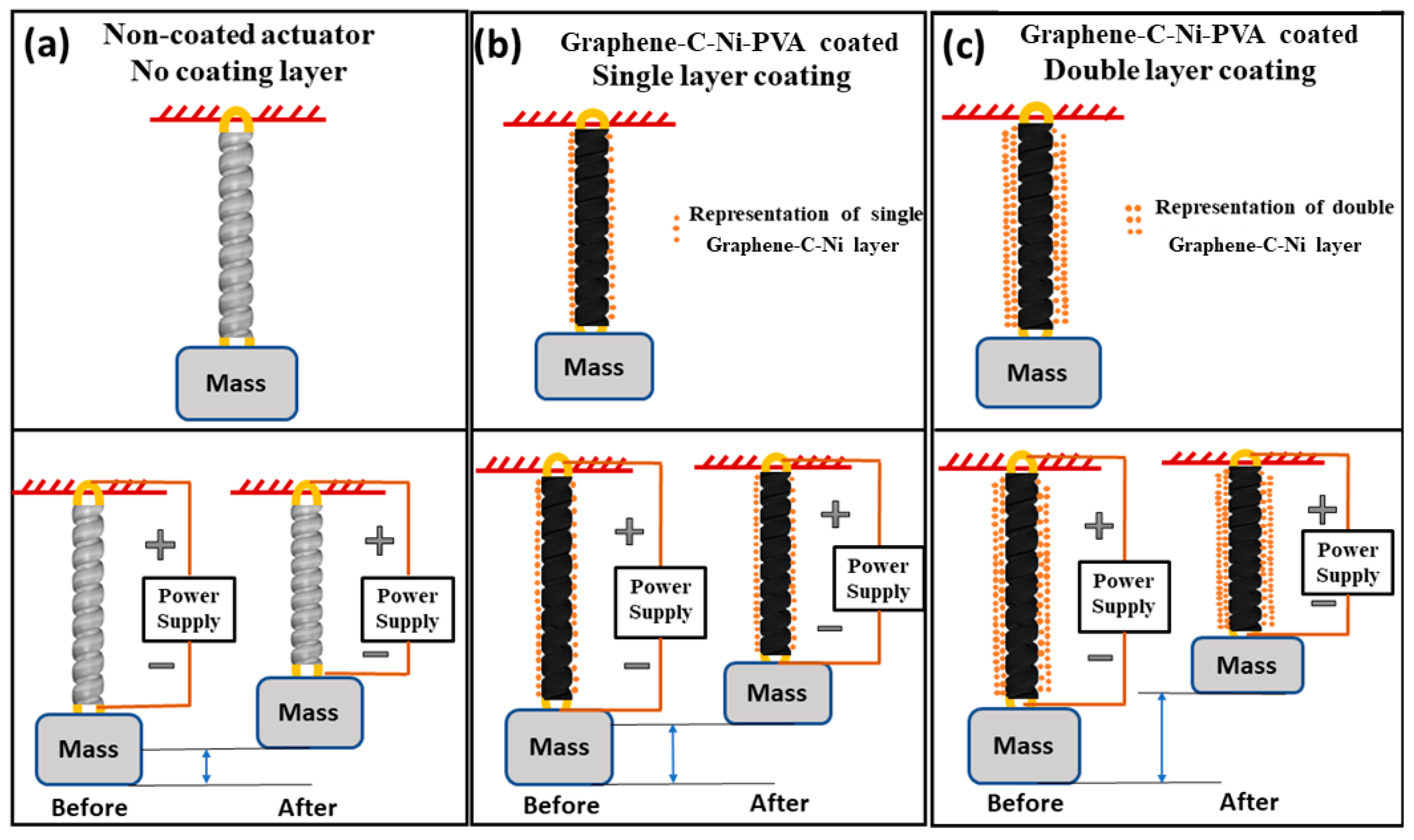
- Introduction of the novel graphene–mesoporous carbon–nickel–PVA-coated mandrel-coiled TCPFLNR, exhibiting approximately 41% higher actuation strain and about 37.5% greater actuation displacement compared to non-coated TCPFLNR of similar length (60 mm unloaded and 69 mm loaded for 70 g pre-stress weight) under 0.27 A input current conditions.
- (ii)
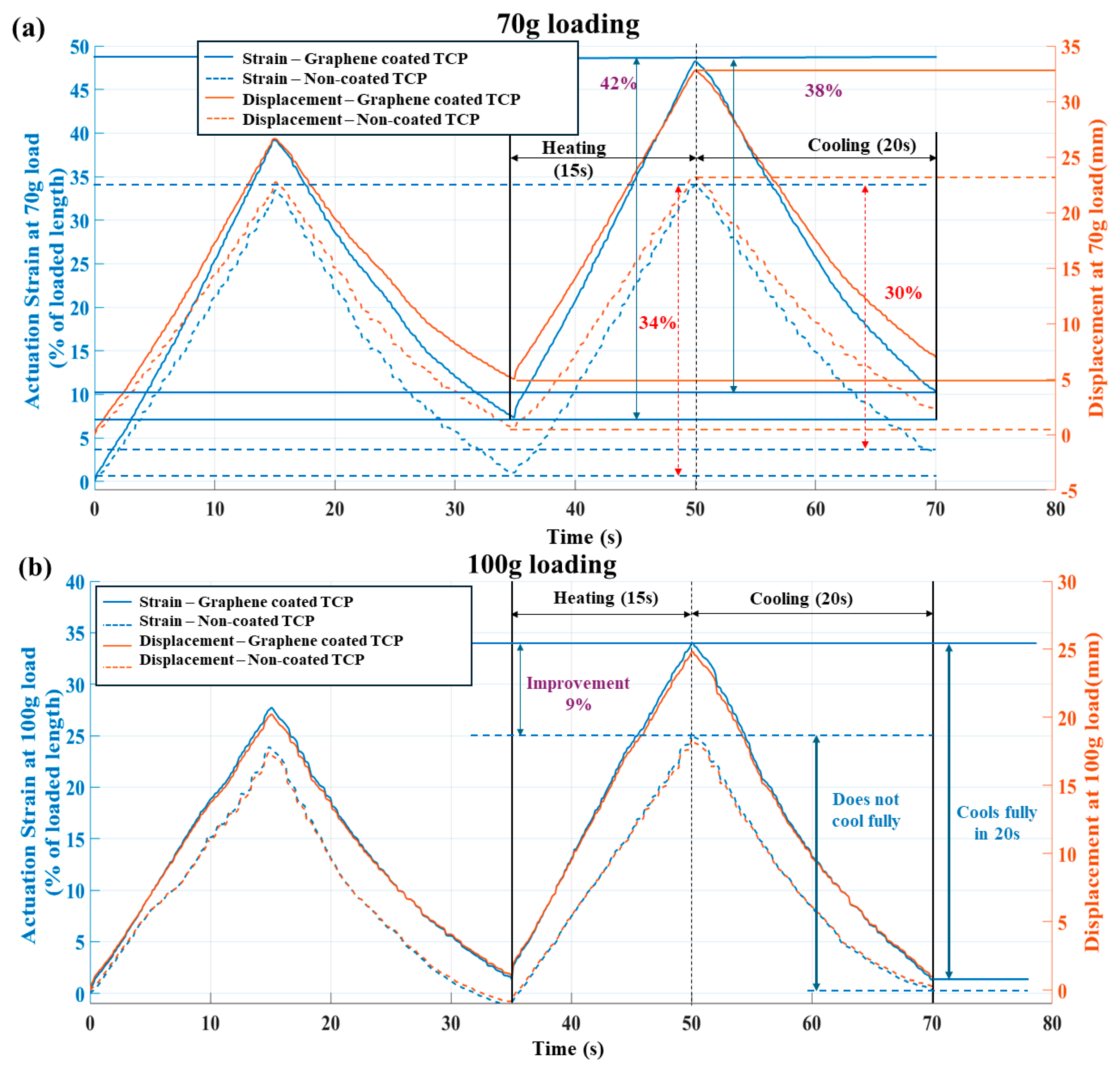
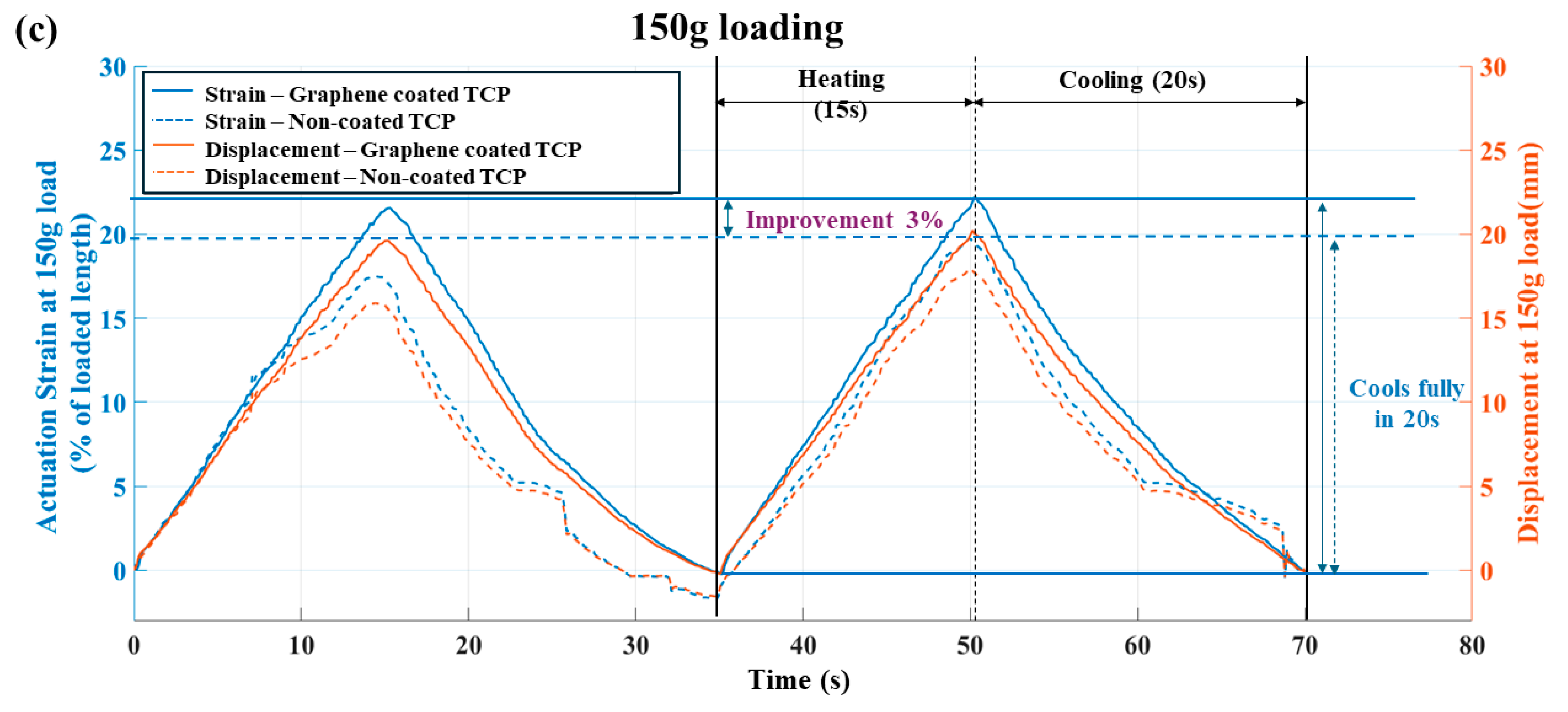
- Enhancement in dynamic actuation by approximately 24%, 36%, and 11% for pre-stress loads of 70 g, 100 g, and 150 g, respectively, with the novel nanomaterial-coated mandrel-coiled TCPFLNR, demonstrating the advantages of utilizing the graphene–mesoporous carbon–nickel–PVA solution.
- (iii)
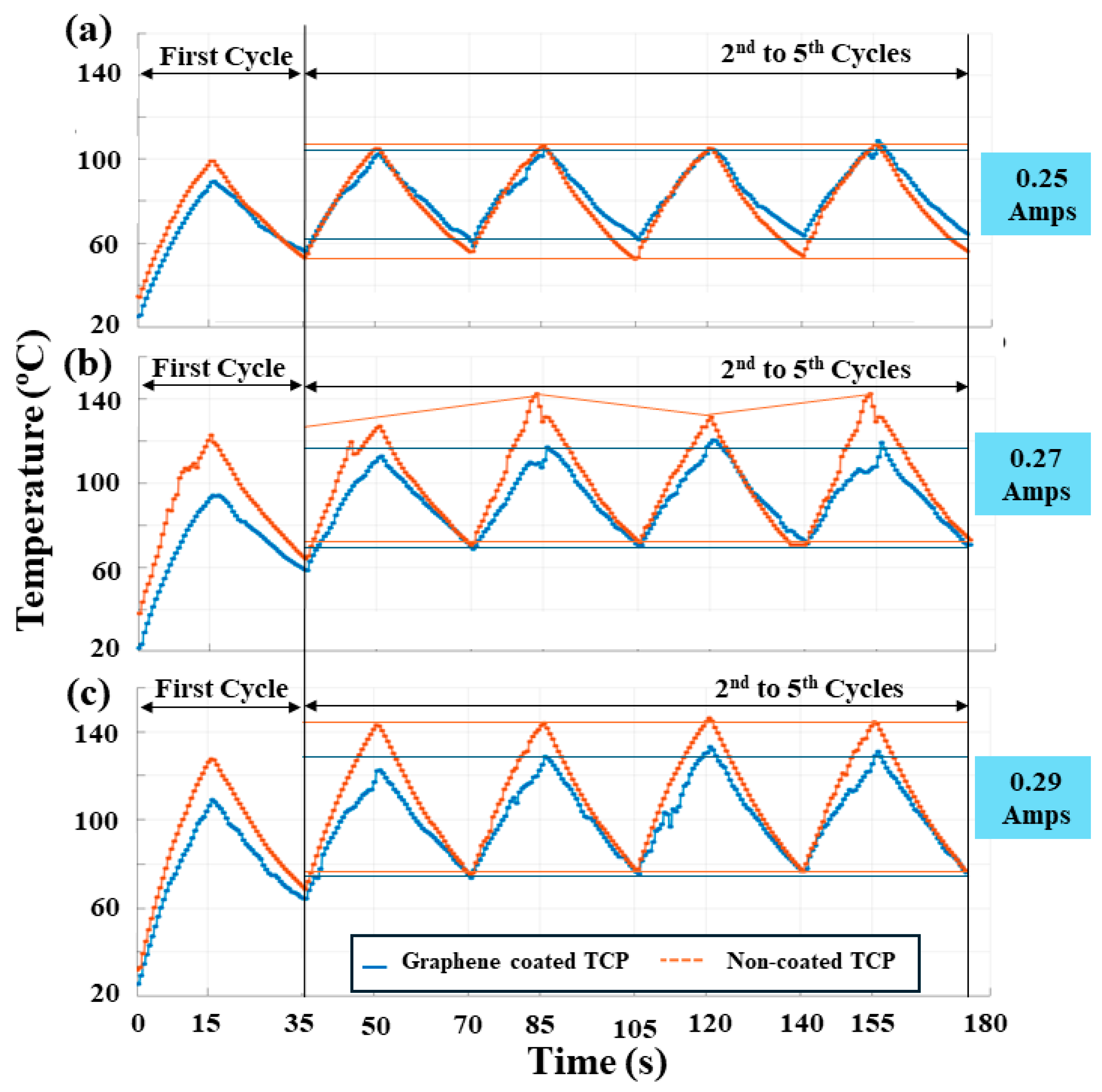
- Improvement in the cooling rate of the actuator by approximately 26%, 54%, and 11% for pre-stress loads of 70 g, 100 g, and 150 g, respectively, with the novel nanomaterial-coated mandrel-coiled TCPFLNR.
- (iv)
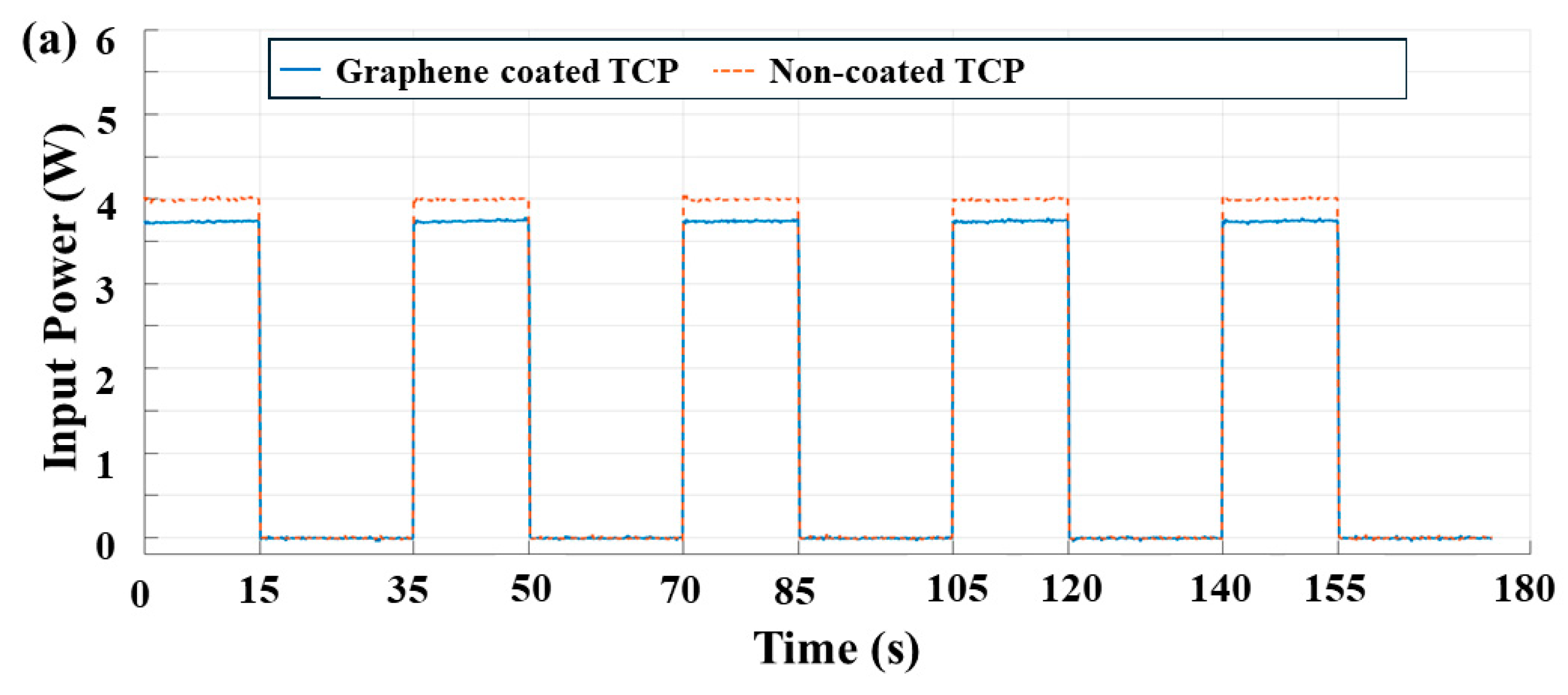
- Reduction in power consumption ranging from approximately 6% to 9% for similar input current conditions (0.25 A, 0.27 A, 0.29 A), while providing an average of 25% more actuation strain.
2. Materials and Methods
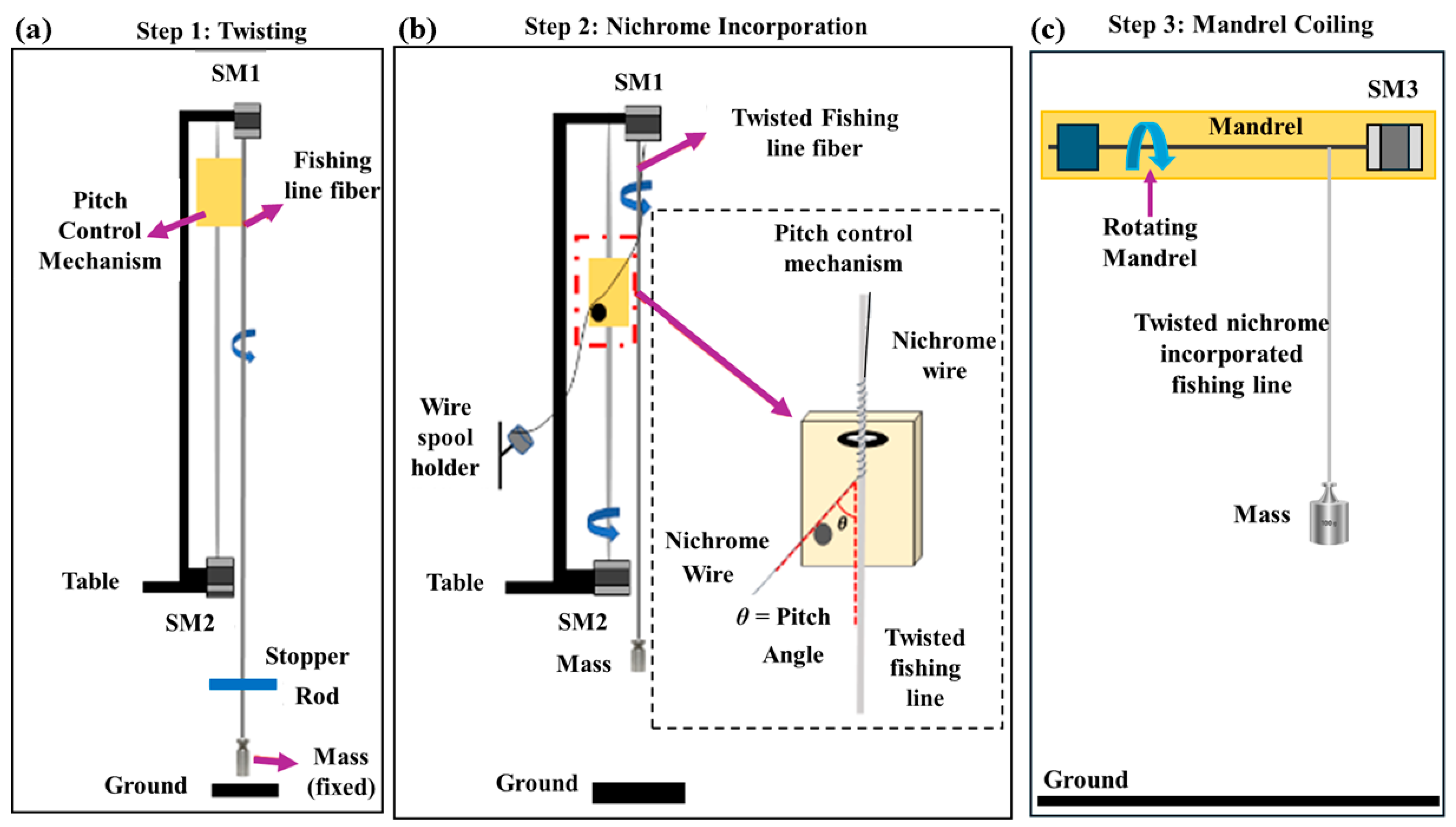
2.1. Mandrel-Coiled TCPFLNR Muscle Fabrication
2.1.1. Twist Insertion
2.1.2. Resistance Wire Incorporation
2.1.3. Mandrel Coiling Process
2.1.4. Thermal Annealing Process
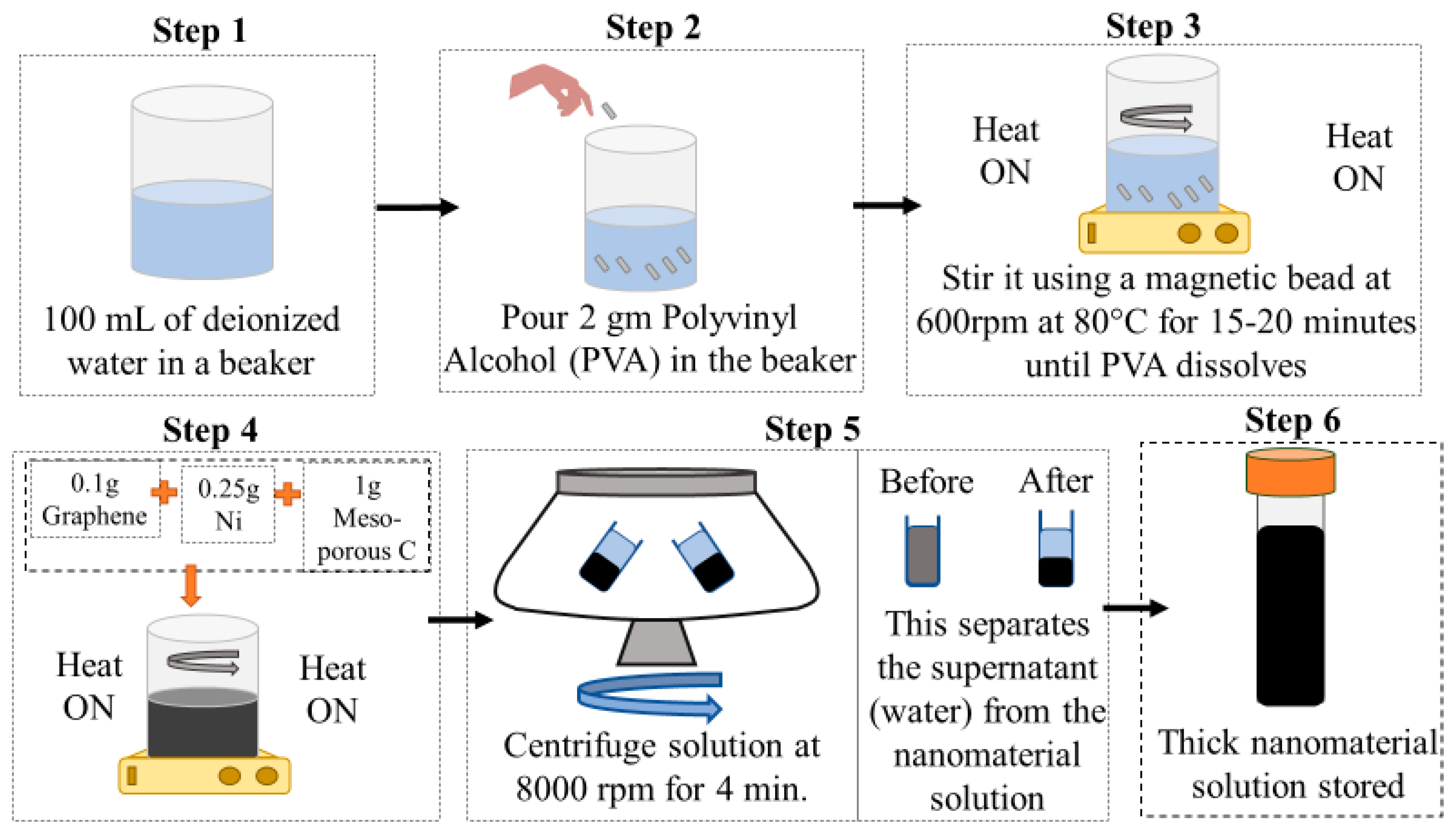
2.2. Synthesis of Graphene–Mesoporous C–Ni–PVA Solution
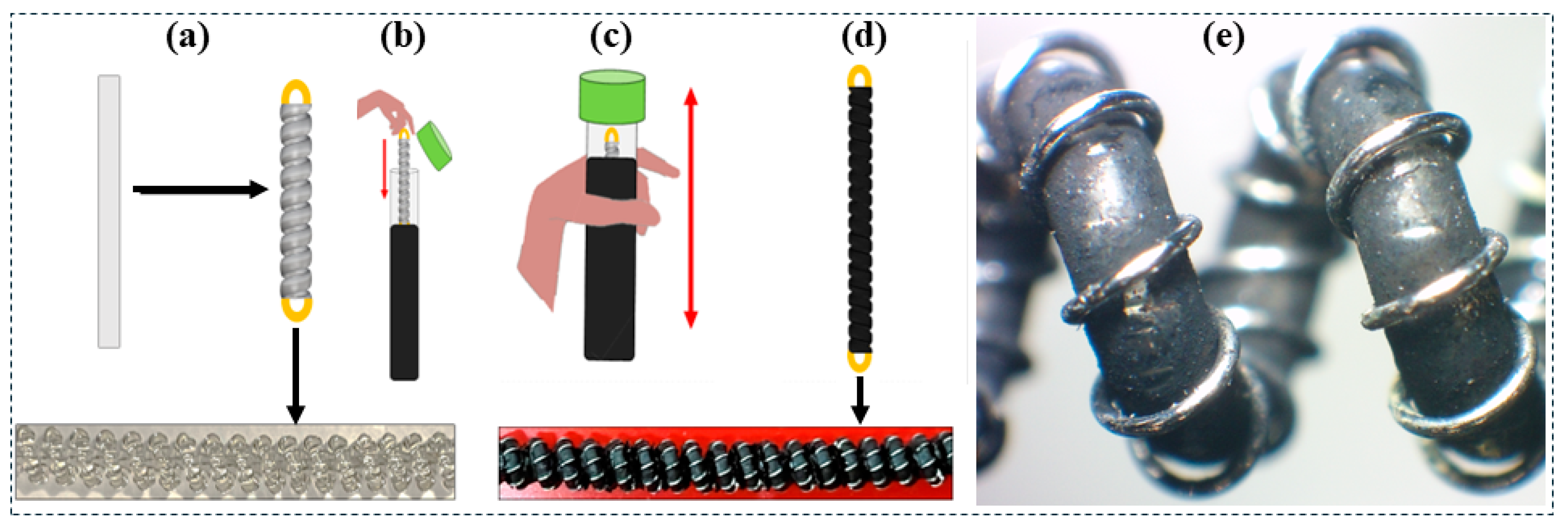
2.3. Coating Process of Mandrel-Coiled TCPFLNR
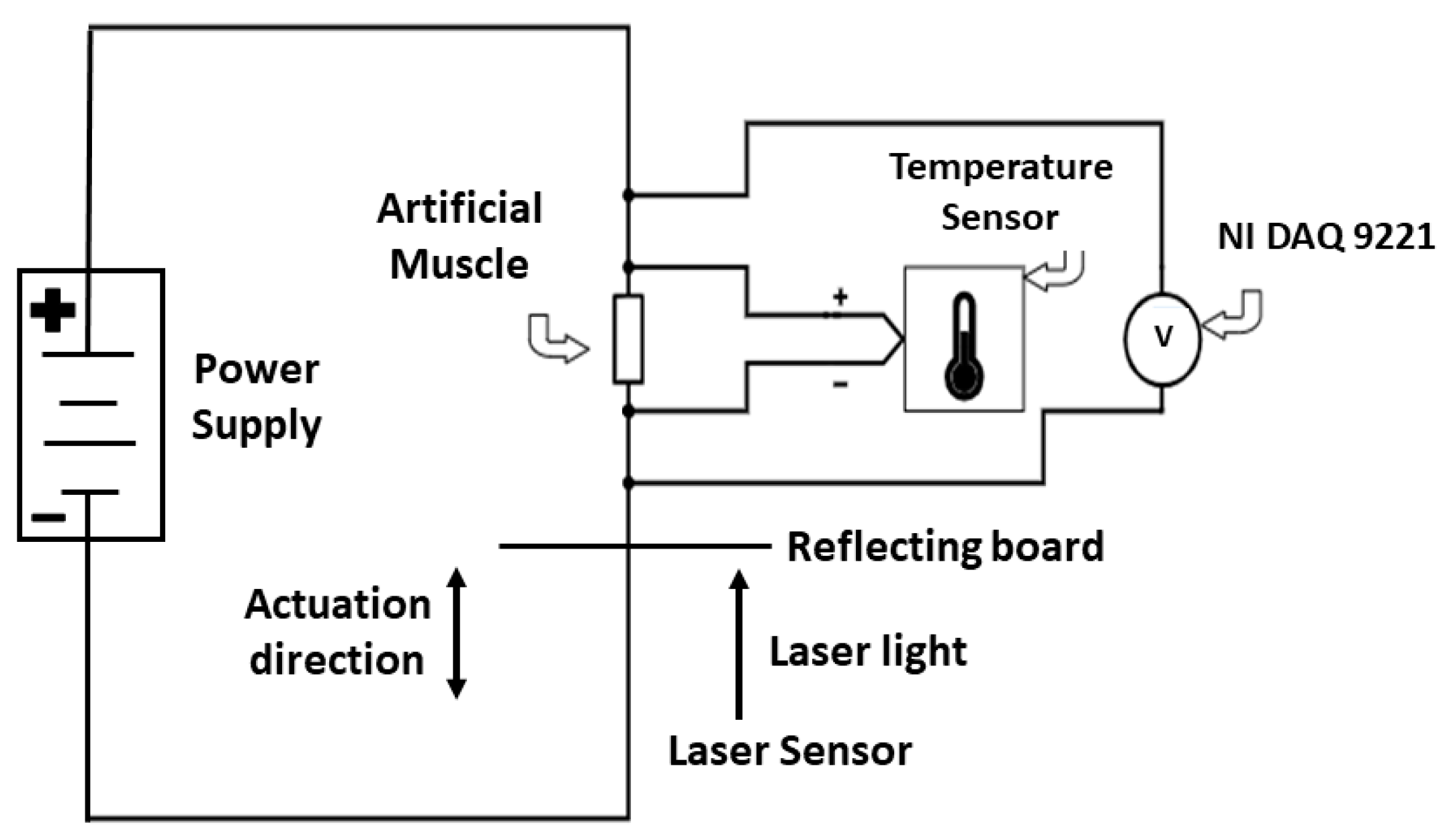
2.4. Characterization of Coated TCPFLNR
3. Results and Discussion
3.1. Characterization of Coated TCPFLNR
3.2. Actuation Strain and Displacement Comparison with Time Variation of Coated and Non-Coated Actuator
3.3. Comparison of Power Consumed with Time for Coated and Non-Coated Actuator
3.4. Comparison of Temperature Variation with Time for Coated and Non-Coated Actuator
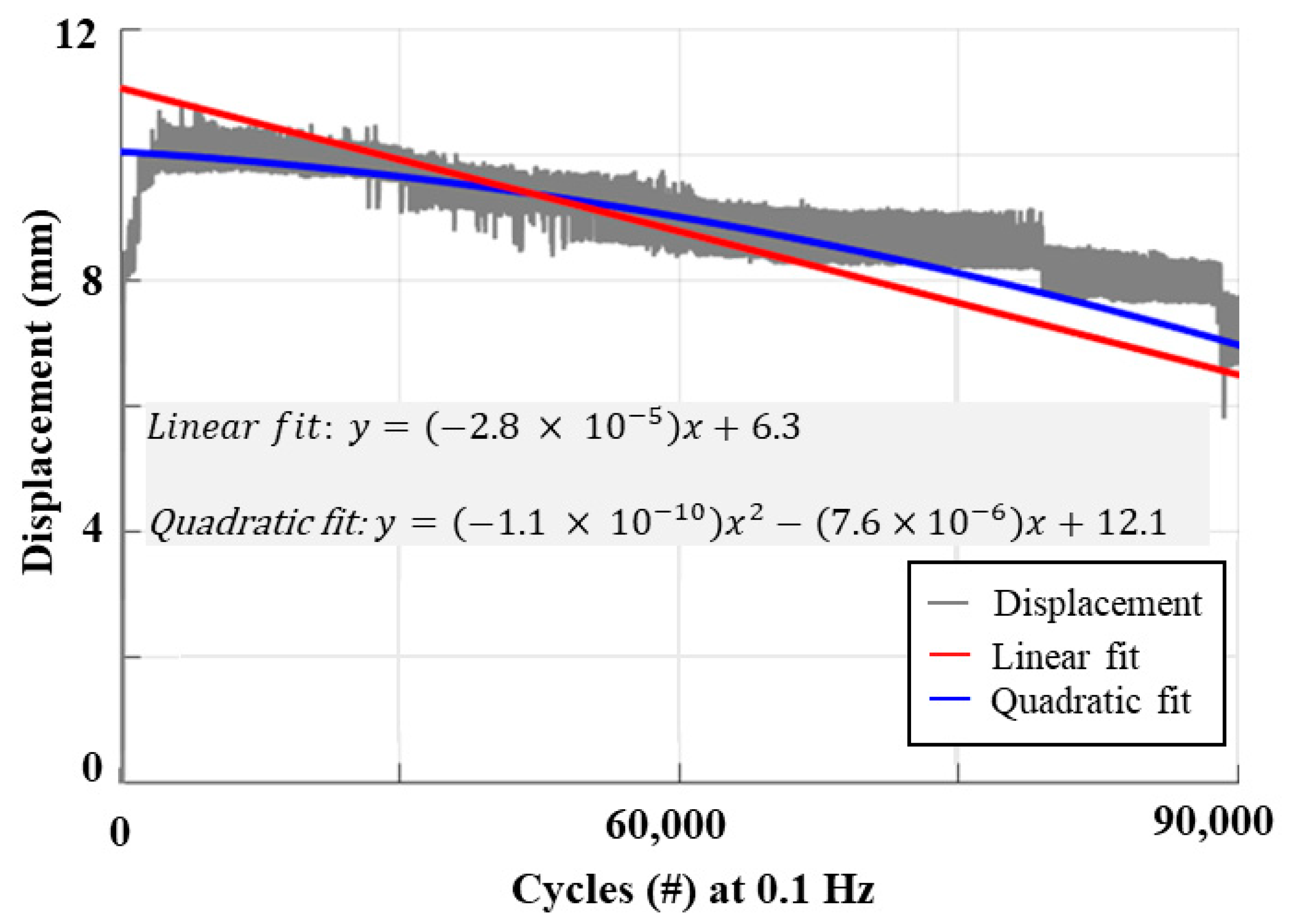
3.5. Lifecycle Test of Graphene–Mesoporous C–Ni–PVA-Coated TCPFLNR
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Majidi, C. Soft-matter engineering for soft robotics. Adv. Mater. Technol. 2019, 4, 1800477. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef]
- Jeong, J.; Hyeon, K.; Jang, S.-Y.; Chung, C.; Hussain, S.; Ahn, S.-Y.; Bok, S.-K.; Kyung, K.-U. Soft wearable robot with shape memory alloy (SMA)-based artificial muscle for assisting with elbow flexion and forearm supination/pronation. IEEE Robot. Autom. Lett. 2022, 7, 6028–6035. [Google Scholar] [CrossRef]
- Matharu, P.S.; Wang, Z.; Costello, J.H.; Colin, S.P.; Baughman, R.H.; Tadesse, Y.T. SoJel—A 3D printed jellyfish-like robot using soft materials for underwater applications. Ocean Eng. 2023, 279, 114427. [Google Scholar] [CrossRef]
- Almubarak, Y.; Punnoose, M.; Maly, N.X.; Hamidi, A.; Tadesse, Y. KryptoJelly: A jellyfish robot with confined, adjustable pre-stress, and easily replaceable shape memory alloy NiTi actuators. Smart Mater. Struct. 2020, 29, 075011. [Google Scholar] [CrossRef]
- Higueras-Ruiz, D.; Shafer, M.; Feigenbaum, H. Cavatappi artificial muscles from drawing, twisting and coiling polymer tubes. Sci. Robot. 2021, 6, eabd5383. [Google Scholar] [CrossRef]
- Higueras-Ruiz, D.R.; Feigenbaum, H.P.; Shafer, M.W. Material-based modeling of cavatappi artificial muscles. Smart Mater. Struct. 2022, 31, 125021. [Google Scholar] [CrossRef]
- Joshi, A.; Kulkarni, A.; Tadesse, Y. FludoJelly: Experimental study on jellyfish-like soft robot enabled by soft pneumatic composite (SPC). Robotics 2019, 8, 56. [Google Scholar] [CrossRef]
- Xavier, M.S.; Tawk, C.D.; Zolfagharian, A.; Pinskier, J.; Howard, D.; Young, T.; Lai, J.; Harrison, S.M.; Yong, Y.K.; Bodaghi, M.; et al. Soft Pneumatic Actuators: A Review of Design, Fabrication, Modeling, Sensing, Control and Applications. IEEE Access 2022, 10, 59442–59485. [Google Scholar] [CrossRef]
- Mao, G.; Drack, M.; Karami-Mosammam, M.; Wirthl, D.; Stockinger, T.; Schwödiauer, R.; Kaltenbrunner, M. Soft electromagnetic actuators. Sci. Adv. 2020, 6, eabc0251. [Google Scholar] [CrossRef]
- Haines, C.S.; Lima, M.D.; Li, N.; Spinks, G.M.; Foroughi, J.; Madden, J.D.W.; Kim, S.H.; Fang, S.; de Andrade, M.J.; Göktepe, F.; et al. Artificial Muscles from Fishing Line and Sewing Thread. Science 2014, 343, 868–872. [Google Scholar] [CrossRef]
- Hamidi, A.; Almubarak, Y.; Rupawat, Y.; Warren, J.; Tadesse, Y. Poly-saora robotic jellyfish: Swimming underwater by twisted and coiled polymer actuators. Smart Mater. Struct. 2020, 29, 045039. [Google Scholar] [CrossRef]
- Matharu, P.S.; Ghadge, A.A.; Almubarak, Y.; Tadesse, Y. Jelly-Z: Twisted and coiled polymer muscle actuated jellyfish robot for environmental monitoring. ACTA IMEKO 2022, 11, 1–7. [Google Scholar] [CrossRef]
- Matharu, P.S.; Gong, P.; Guntaka, K.P.R.; Almubarak, Y.; Jin, Y.; Tadesse, Y.T. Jelly-Z: Swimming performance and analysis of twisted and coiled polymer (TCP) actuated jellyfish soft robot. Sci. Rep. 2023, 13, 11086. [Google Scholar] [CrossRef] [PubMed]
- Matharu, P.S.; Song, Y.; Gandhi, U.; Tadesse, Y. Fabrication and Characterization of Mesoporous Carbon-Nickel Silver Powder-Poly (Vinyl Alcohol) Coated Mandrel-Coiled TCPFL Artificial Muscles for Enhanced Performance. In Smart Materials, Adaptive Structures and Intelligent Systems; American Society of Mechanical Engineers: New York, NY, USA, 2023; Volume 87523, p. V001T06A015. [Google Scholar]
- Matharu, P.S.; Ovy, S.M.A.I.; Singh, A.P.; Song, Y.; Gandhi, U.; Tadesse, Y. Jelly-Z 2.0: 3D Printed Soft Jellyfish Robot Actuated With Self-Coiled CNT-C-Ni-PVA Coated TCPFL. In Proceedings of the ASME 2023 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Austin, TX, USA, 11–13 September 2023. [Google Scholar] [CrossRef]
- Lee, J.A.; Li, N.; Haines, C.S.; Kim, K.J.; Lepró, X.; Ovalle-Robles, R.; Kim, S.J.; Baughman, R.H. Electrochemically Powered, Energy-Conserving Carbon Nanotube Artificial Muscles. Adv. Mater. 2017, 29, 1700870. [Google Scholar] [CrossRef] [PubMed]
- Di, J.; Fang, S.; Moura, F.A.; Galvão, D.S.; Bykova, J.; Aliev, A.; de Andrade, M.J.; Lepró, X.; Li, N.; Haines, C.; et al. Strong, Twist-Stable Carbon Nanotube Yarns and Muscles by Tension Annealing at Extreme Temperatures. Adv. Mater. 2016, 28, 6598–6605. [Google Scholar] [CrossRef] [PubMed]
- Lima, M.D.; Li, N.; de Andrade, M.J.; Fang, S.; Oh, J.; Spinks, G.M.; Kozlov, M.E.; Haines, C.S.; Suh, D.; Foroughi, J.; et al. Electrically, Chemically, and Photonically Powered Torsional and Tensile Actuation of Hybrid Carbon Nanotube Yarn Muscles. Science 2012, 338, 928–932. [Google Scholar] [CrossRef] [PubMed]
- Piao, C.; Jang, H.; Lim, T.; Kim, H.; Choi, H.R.; Hao, Y.; Suk, J.W. Enhanced dynamic performance of twisted and coiled soft actuators using graphene coating. Compos. Part B Eng. 2019, 178, 107499. [Google Scholar] [CrossRef]
- Piao, C.; Suk, J.W. Graphene/silver nanoflower hybrid coating for improved cycle performance of thermally-operated soft actuators. Sci. Rep. 2020, 10, 17553. [Google Scholar] [CrossRef]
- Pop, E.; Varshney, V.; Roy, A.K. Thermal properties of graphene: Fundamentals and applications. MRS Bull. 2012, 37, 1273–1281. [Google Scholar] [CrossRef]
- Su, Y.; Li, J.J.; Weng, G.J. Theory of thermal conductivity of graphene-polymer nanocomposites with interfacial Kapitza resistance and graphene-graphene contact resistance. Carbon 2018, 137, 222–233. [Google Scholar] [CrossRef]
- Fu, Y.; Hansson, J.; Liu, Y.; Chen, S.; Zehri, A.; Samani, M.K.; Wang, N.; Ni, Y.; Zhang, Y.; Zhang, Z.-B.; et al. Graphene related materials for thermal management. 2D Mater. 2020, 7, 012001. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, L.; Cui, L.; Zhang, Y.; Du, X. Molecular dynamics simulation of the effect of oxygen-containing functional groups on the thermal conductivity of reduced graphene oxide. Comput. Mater. Sci. 2018, 148, 176–183. [Google Scholar] [CrossRef]
- Yeom, Y.S.; Cho, K.Y.; Seo, H.Y.; Lee, J.S.; Im, D.H.; Nam, C.Y.; Yoon, H.G. Unprecedentedly high thermal conductivity of carbon/epoxy composites derived from parameter optimization studies. Compos. Sci. Technol. 2020, 186, 107915. [Google Scholar] [CrossRef]
- Balandin, A.A.; Ghosh, S.; Bao, W.; Calizo, I.; Teweldebrhan, D.; Miao, F.; Lau, C.N. Superior Thermal Conductivity of Single-Layer Graphene. Nano Lett. 2008, 8, 902–907. [Google Scholar] [CrossRef]
- Chen, S.; Moore, A.L.; Cai, W.; Suk, J.W.; An, J.; Mishra, C.; Amos, C.; Magnuson, C.W.; Kang, J.; Shi, L.; et al. Raman Measurements of Thermal Transport in Suspended Monolayer Graphene of Variable Sizes in Vacuum and Gaseous Environments. ACS Nano 2011, 5, 321–328. [Google Scholar] [CrossRef]
- Rouquerol, J.; Avnir, D.; Fairbridge, C.W.; Everett, D.H.; Haynes, J.M.; Pernicone, N.; Ramsay, J.D.F.; Sing, K.S.W.; Unger, K.K. Recommendations for the characterization of porous solids (Technical Report). Pure Appl. Chem. 1994, 66, 1739–1758. [Google Scholar] [CrossRef]
- Rahman, M.M.; Ara, M.G.; Alim, M.A.; Uddin, M.S.; Najda, A.; Albadrani, G.M.; Sayed, A.A.; Mousa, S.A.; Abdel-Daim, M.M. Mesoporous Carbon: A Versatile Material for Scientific Applications. Int. J. Mol. Sci. 2021, 22, 4498. [Google Scholar] [CrossRef]
- Liu, B.; Liu, L.; Yu, Y.; Zhang, Y.; Chen, A. Synthesis of mesoporous carbon with tunable pore size for supercapacitors. New J. Chem. 2020, 44, 1036–1044. [Google Scholar] [CrossRef]
- Sun, J.; Yao, Y.; Zeng, X.; Pan, G.; Hu, J.; Huang, Y.; Sun, R.; Xu, J.-B.; Wong, C.-P. Preparation of boron nitride nanosheet/nanofibrillated cellulose nanocomposites with ultrahigh thermal conductivity via engineering interfacial thermal resistance. Adv. Mater. Interfaces 2017, 4, 1700563. [Google Scholar] [CrossRef]
- Jain, S.K.; Tadesse, Y. Fabrication of polylactide/carbon nanopowder filament using melt extrusion and filament characterization for 3D printing. Int. J. Nanosci. 2019, 18, 1850026. [Google Scholar] [CrossRef]
- Potnuru, A.; Tadesse, Y. Investigation of polylactide and carbon nanocomposite filament for 3D printing. Prog. Addit. Manuf. 2019, 4, 23–41. [Google Scholar] [CrossRef]
- Chen, X.; Guo, W.; Xie, L.; Wei, C.; Zhuang, J.; Su, W.; Cui, Z. Embedded Ag/Ni Metal-Mesh with Low Surface Roughness As Transparent Conductive Electrode for Optoelectronic Applications. ACS Appl. Mater. Interfaces 2017, 9, 37048–37054. [Google Scholar] [CrossRef] [PubMed]
- Wu, L.; Chauhan, I.; Tadesse, Y. A novel soft actuator for the musculoskeletal system. Adv. Mater. Technol. 2018, 3, 1700359. [Google Scholar] [CrossRef]
- MatWeb. Overview of Materials for Nylon 6, Cast. Available online: https://matweb.com/search/DataSheet.aspx?MatGUID=8d78f3cfcb6f49d595896ce6ce6a2ef1&ckck=1 (accessed on 28 November 2023).
- Wu, Y.; Chen, E.; Weng, X.; He, Z.; Chang, G.; Pan, X.; Liu, J.; Huang, K.; Huang, K.; Lei, M.; et al. Conductive Polyvinyl Alcohol/Silver Nanoparticles Hydrogel Sensor with Large Draw Ratio, High Sensitivity and High Stability for Human Behavior Monitoring. Eng. Sci. 2022, 18, 113–120. [Google Scholar] [CrossRef]
- Elango, J.; Zamora-Ledezma, C.; Alexis, F.; Wu, W.; de Val, J.E.M.-S. Protein Adsorption, Calcium-Binding Ability, and Biocompatibility of Silver Nanoparticle-Loaded Polyvinyl Alcohol (PVA) Hydrogels Using Bone Marrow-Derived Mesenchymal Stem Cells. Pharmaceutics 2023, 15, 1843. [Google Scholar] [CrossRef] [PubMed]
- Cherubini, A.; Moretti, G.; Vertechy, R.; Fontana, M. Experimental characterization of thermally-activated artificial muscles based on coiled nylon fishing lines. AIP Adv. 2015, 5, 067158. [Google Scholar] [CrossRef]
- Dynalloy. FLEXINOL® Actuator Spring Technical and Design Data; Dynalloy Inc.: Irvine, CA, USA, 2021. [Google Scholar]
- Hamidi, A.; Almubarak, Y.; Tadesse, Y. Multidirectional 3D-printed functionally graded modular joint actuated by TCPFL muscles for soft robots. Bio-Des. Manuf. 2019, 2, 256–268. [Google Scholar] [CrossRef]
- Wu, L.; de Andrade, M.J.; Rome, R.S.; Haines, C.; Lima, M.D.; Baughman, R.H.; Tadesse, Y. Nylon-muscle-actuated robotic finger. Proc. SPIE 2015, 9431, 94310I. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actuation Technologies | This Work | SMA Wire [41] | TCP-6ply [12] | TCP Fishing Line with Heater [13,42] | Fishing Line Hydrothermal Mandrel-Coiled [43] | Coiled SMA [41] | TCP Mandrel-Coiled Muscle [36] |
|---|---|---|---|---|---|---|---|
| Material | Graphene–C–Ni–PVA-coated TCPFLNR | Mandrel-coiled nylon 6, fishing line with 0.16 mm nichrome | Silver-coated nylon 66 | Nylon 66, fishing line with 0.08 mm nichrome | Nylon 66, fishing line | Nickel and titanium (NiTi) | Mandrel-coiled nylon 6, fishing line with 0.08 mm nichrome |
| Actuation type | Electrothermal | Electrothermal | Electrothermal | Electrothermal | Hydrothermal | Electrothermal | Electrothermal |
| Precursor fiber diameter (mm) | 0.8 | 0.127 | 0.2 | 0.8 | 0.8 | 0.381 | 0.8 |
| Precursor filament type | Monofilament | N/A | Multifilament | Monofilament | Monofilament | N/A | Monofilament |
| Outer diameter (mm) | 3.4 | N/A | 2.4 | 2.8 | 3.3 | 0.10 | 4.5 |
| Mandrel usage # | Yes | No | No | No | Yes | Yes | Yes |
| Resistance (Ω/mm) | 1 | 1.9 (Ω/inch) | 0.031 | 2 | ----------- | 0.00827 | 2.5 |
| Force lifting capability at max strain (MPa) | ~2 | ~4.4 | ~1.96 | ~1.56 | 300 g | 0.3 | 1.69 |
| Actuation stroke | 48% † | 4–8% | 17–20% | 38% | 30% at 90 °C water | 120% at 0.25 Hz | 53% * |
| Lifecycle (cycles) | Tested until 90,000 cycles | ~106 cycles in air | 787 in water at 0.25 Hz, 25% duty cycle | 2400 in air at 0.009 Hz and 1% duty cycle | ----------- | ~104 cycles in water | Tested until 2300 cycles |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matharu, P.S.; Song, Y.; Gandhi, U.; Tadesse, Y. Fabrication and Characterization of Graphene–Mesoporous Carbon–Nickel–Poly(Vinyl Alcohol)-Coated Mandrel-Coiled TCPFLNR Artificial Muscle. Biomimetics 2024, 9, 458. https://doi.org/10.3390/biomimetics9080458
Matharu PS, Song Y, Gandhi U, Tadesse Y. Fabrication and Characterization of Graphene–Mesoporous Carbon–Nickel–Poly(Vinyl Alcohol)-Coated Mandrel-Coiled TCPFLNR Artificial Muscle. Biomimetics. 2024; 9(8):458. https://doi.org/10.3390/biomimetics9080458
Chicago/Turabian StyleMatharu, Pawandeep Singh, Yuyang Song, Umesh Gandhi, and Yonas Tadesse. 2024. "Fabrication and Characterization of Graphene–Mesoporous Carbon–Nickel–Poly(Vinyl Alcohol)-Coated Mandrel-Coiled TCPFLNR Artificial Muscle" Biomimetics 9, no. 8: 458. https://doi.org/10.3390/biomimetics9080458