1. Introduction
One of the main visions of the future power systems is high penetration level of renewable energy technologies [
1,
2]. Renewable energy power plants, such as wind and solar farms, are fundamentally different from conventional power plants in terms of components and structure. In conventional power systems, synchronous generators are the main sources of reactive power to support voltage and maintain stability. In the renewable generation system, the voltage is controlled through power electronic converter [
3,
4,
5].
If the grid faces voltage instability, following a disturbance, the voltage declines within few minutes dramatically and monotonically. When this decrease is too pronounced, the system integrity is endangered. This degradation process may eventually lead to a blackout in the form of a voltage collapse [
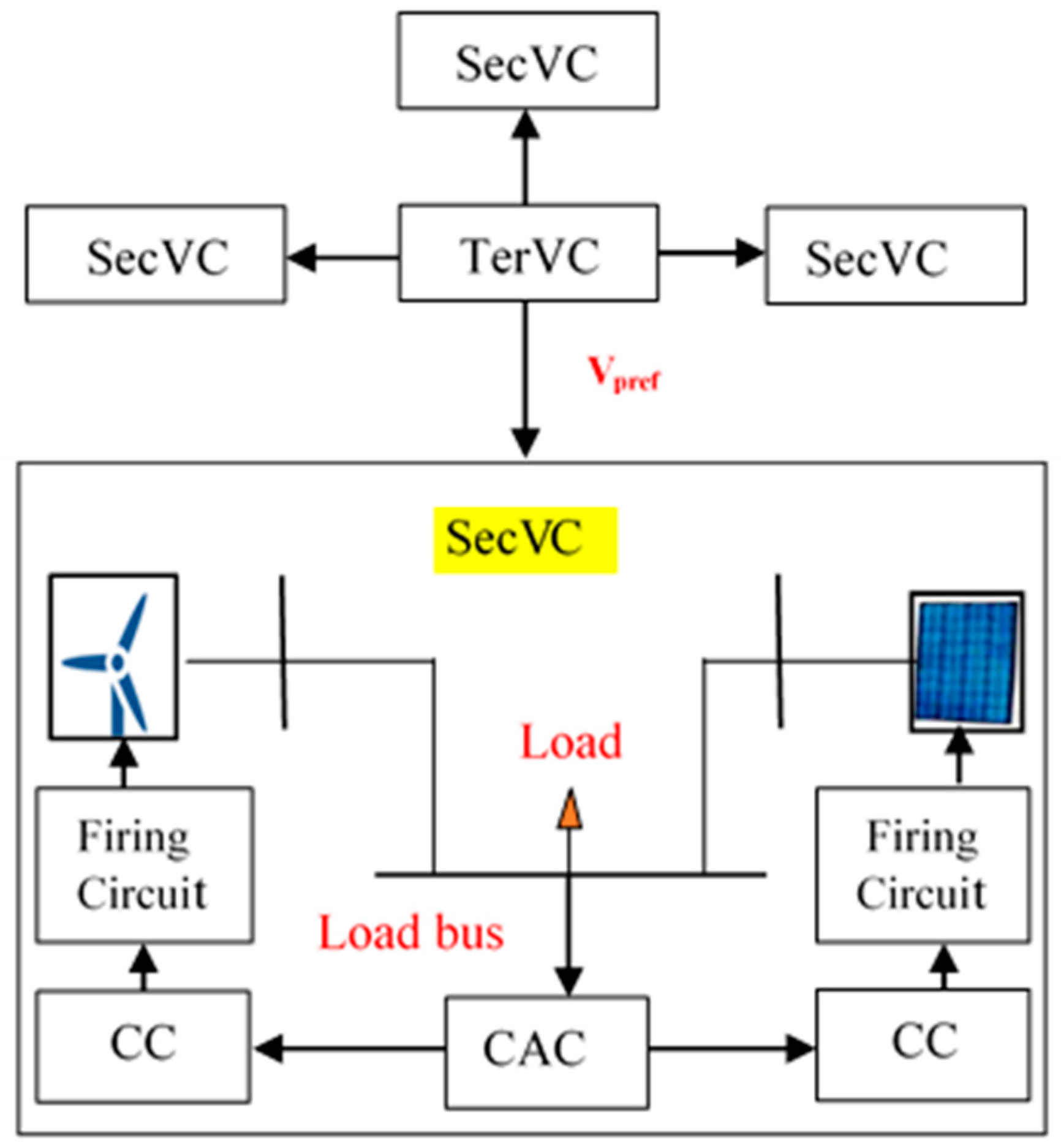
6]. The control of voltage in electrical power networks has three hierarchical levels: Primary Voltage Control (PriVC), Secondary Voltage Control (SecVC), and Tertiary Voltage Control (TerVC) [
7]. PriVC regulates the voltage of the generator bus by controlling the reactive power injection or absorption through automatic voltage regulators for the synchronous generators [
8]. PriVC is performed in fraction of seconds to ten seconds. SecVC is directed to regulate load buses voltage magnitude. SecVC requires partitioning the grid into regions and select the pilot bus of each region. The pilot bus is normally the most sensitive load bus to the reactive power changes. A control system is applied to the pilot bus of the region by using a controller to track the optimal value of the pilot bus voltage. The optimal value is calculated from TerVC. Normally, through control action the generators in the region will be asked to inject/absorb reactive power by adding a signal to the PriVC. SecVC implementation time is ranging from 50 s to 25 min. to avoid overlap with the PriVC action. TerVC is normally an optimal power flow process occur every half an hour or longer time interval. The optimal power flow process is typically performed to achieve an objective or multi objectives, such as minimum power losses or/and minimum generating cost. Pilot bus reference voltage is calculated from TerVC [
9].
Countries worldwide are spotting remarkable efforts towards the smart grid in the recent years. The smart grid is a power system with high quality, security, stability, efficiency, and green environment. To achieve these objectives wide area measurement systems, real time control, real time protection, and self-healing would be considered in the future grids. The wide area measurement system is achieved by using Phasor Measurement Units (PMUs) based on global positioning system. PMUs facilitate real time voltage control and self-healing [
10,
11]. An application of coordinated SecVC to a power system with conventional power plants was presented in [
12].
There are a lot of methods proposed in previous work in order to apply primary voltage control to transmission and distribution grids with high share of renewable energies. In [
13], the paper illustrates how the voltage control is applied through optimal placement of unified power flow controllers. In [
14], the research improved the voltage performance of the grid through optimal placement and the sizing of renewable energies.
In [
15], the paper illustrates a technique to apply distributed secondary voltage control among inverter-based generation systems. The secondary control is applied based on droop control. The applied method in [
15]; leads to steady-state error in the pilot bus voltage due to absence of integral action in the regional controller. In addition, technical requirements of grid codes for integrating renewable energies have not been considered. In [
16], the authors target secondary voltage applications of a 100% inverter-based microgrid showing the effect of communication delays. In [
15] and [
16], inverter based secondary voltage control is distributed and controlling buses, which include distributed generation.
The main contributions of this paper are:
Coordinated Secondary voltage control is applied to control a load bus (not include a distributed generation) in a grid feeding from 100% renewable energies through extracting reactive power from inverter-based renewable energy power plants. In this research, a number of Proportional Integral Derivative (PID) controllers are designed in order to deal with various operating conditions using the genetic algorithm toolbox in MATLAB to enable the pilot bus to reach its optimal value at each condition.
The grid codes of integrating renewable energies for countries with high share of renewable energies mainly photovoltaics (PV) and wind are considered while applying secondary voltage control and primary frequency control.
PMUs are used to measure the real time voltage of the pilot bus and detect through what-if-analysis the optimal parameters of the secondary voltage genetic PID controller while using the neural network.
The paper is organized, as follows:
Section 2 describes the configuration of the studied 100% renewable power system.
Section 3 discusses grid code for renewables integration.
Section 4 presents the secondary voltage control and pilot bus selection.
Section 5 illustrates how the PMUs are optimally allocated.
Section 6 briefly describes how the PID controller is optimally designed.
Section 7 illustrates how tertiary voltage control is performed. In
Section 8, the application of the coordinated SecVC to the 100% renewable power system is presented.
Section 9 presents the simulation results and
Section 10 summarizes the main conclusions.
2. 100% Renewable Grid
Some countries achieved 100% renewables in grid operation, such as Iceland, while Norway achieved 98% penetration level of renewables in 2019, Kenya achieved 70 % and aims to reach 100% by the end of 2020 while Brazil and Canada achieved more than 70% and 60%, respectively. Countries, like Denmark, Ireland and Germany, are operating their grids with more than 20% penetration level of renewables [
17,
18]. Now, it is a trend in the United States to reach 100% renewables through building new wind farms, PV parks, and distributed generation [
19,
20]. Globally, the current penetration level of renewables is 19.3% growing faster than the demand, which is an indicator to global 100% renewable energy within decades, which is also a goal of the European Commission [
18].
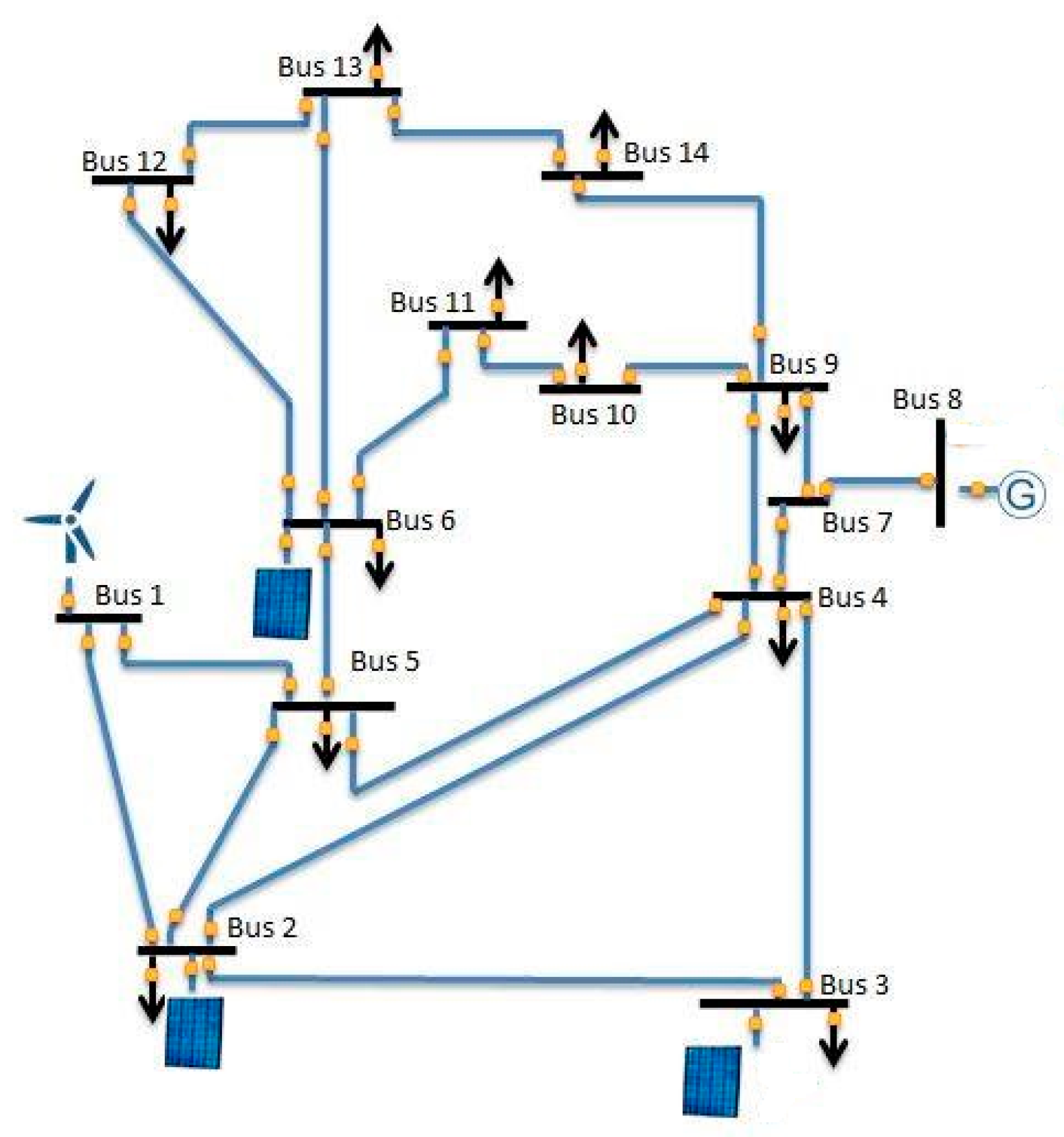
In this paper, selecting a 100% renewable power system was an objective to ensure the validity of controlling the pilot bus load voltage control from only renewable generators. The power system chosen shown in
Figure 1 is the IEEE 14-Bus system after modifying the generation to be 100% renewable, as listed in
Table 1. The modifications are made to enable the control of the pilot bus from inverter-based generation systems. In the proposed 14 bus system, unlike countries with high participation of renewable energies, it is assumed that the penetration level of inverter-based power plants is higher than that of the hydro. The assumption is performed based on the global trend towards increasing the installed capacity of photovoltaics and wind generation.
Appendix A illustrates the lines and load data.
5. Phasor Measurement Units (PMUs)
PMU is a device that can measure voltage and current phasors in the transmission in real time. PMU is one of the most promising devices in smart grid, as it facilitates the application of many features such as real time control and protection in addition to self-healing. The distinction comes from its unique ability to provide synchronized phasor measurements of voltages and currents from widely dispersed locations in an electric power grid. The commercialization of the global positioning satellite (GPS) with an accuracy of timing pulses in the order of one microsecond made possible the commercial production of phasor measurement units [
26]. The main question, which was raised in the past decade, is it possible to install a PMU in each bus bar? Because of the cost of the measurement devices, it is not economically feasible to place them at every grid bus, the answer is no [
27]. In this paper, a sequential linear programming optimization technique is used to get real time measurements for the load buses voltages using a minimum number of PMUs [
28].
The optimization problem is defined as follows:
Objective function: minimization of the PMU devices in the power system,
Such that is the total number of buses, is 0 or 1 depending on the PMU capability of measurement and x is the bus number.
f(x) is a vector function, whose entries are non- zero if the corresponding bus voltage is solvable while using the given measurements [
27,
28].
The PMU can measure the entire bus voltage and the voltage of other buses connected to the bus which has PMU. The optimal placement of PMUs is applied to the network that is shown in
Figure 1. Performing the optimization on MATLAB, results in placing PMUs at buses 2, 6, 8, and 9.
6. PID Controller Design
The design of PID controllers will be performed for each operation condition separately using the GA toolbox in MATLAB to enable the pilot bus to reach its optimal value at this condition. The optimization problem is described, as follows:
Objective Function: Minimizing the integration of pilot bus voltage error (Δ
):
Variables: coordinated PID controller parameters (, , and ).
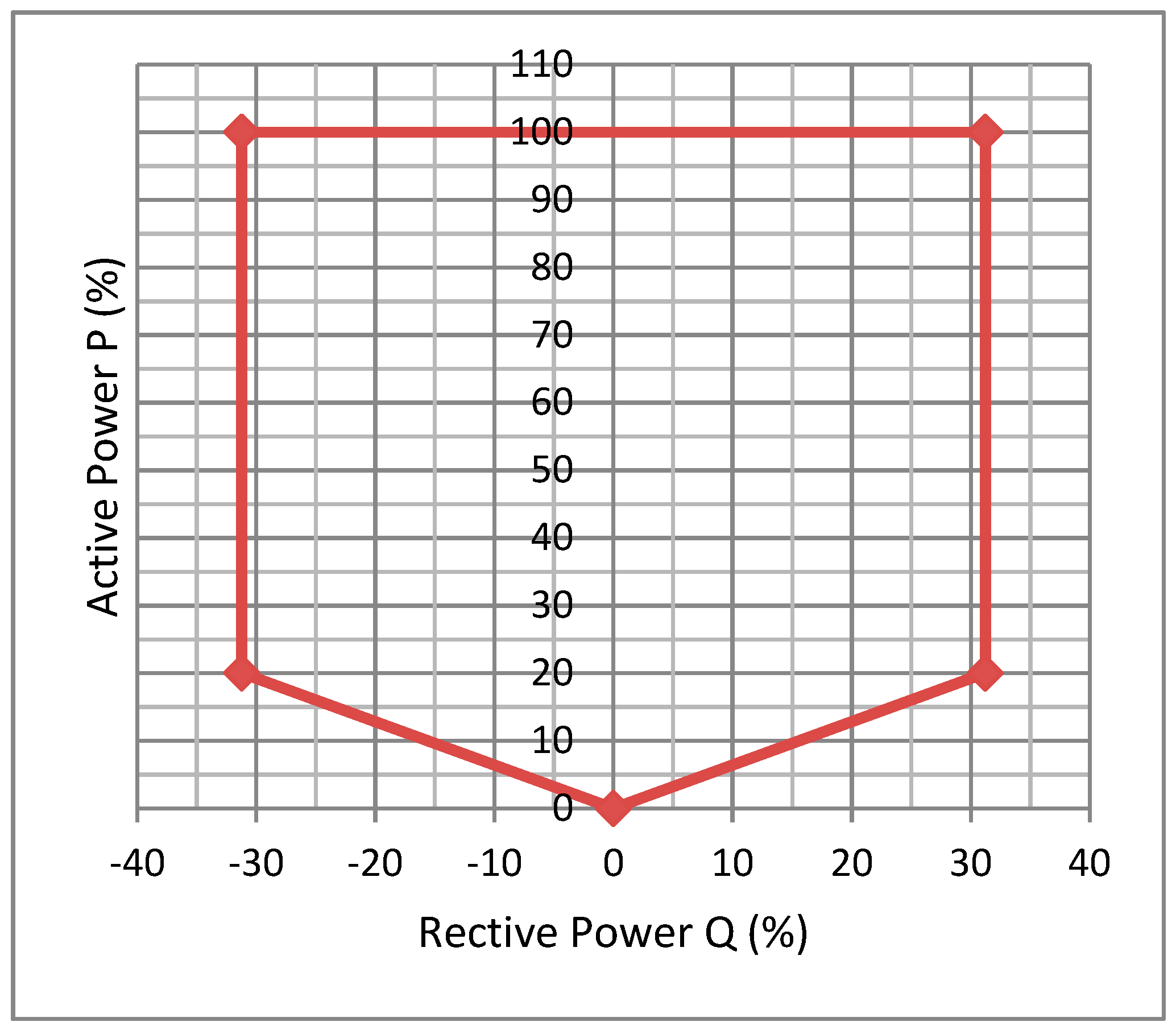
Constraints: q limits (±100%) and generated reactive power limits.
GA is widely known for its optimization capability results; it includes three main stages, which are: reproduction, crossover, and mutation. GA in each stage produce a new generation from the old one by selecting individuals. The convergence speed is varied by using different probabilities for applying these operators. Crossover and mutation operators must be designed carefully, because their selection highly contributes in the evaluation of genetic algorithm [
29].
In the reproduction stage, the performance of individuals is measured by the fitness function, and it also directs the selection process. Suitable individuals increase opportunities to transfer genetically important material to successive generations. Through this route, GA searches in the search space from many points simultaneously, and the search focus is constantly narrowed to the observed performance areas [
29]. The reproduction is responsible for selecting a novel form of chromosomes, and cross-over mix exchanging partitions of two chromosomes. More chromosomes are generated with the cross-over operation. Reproduction is a clear characteristic of existing species with significant reproductive potential that their population size will increase exponentially if individuals of this species proliferate successfully. Reproduction can progeny by the transfer of the individual’s genetic program. The search space is widened to all possible groups of the parameter values of the controller in order to minimize the values of the fitness function, which is the error criterion. The error criterion of PID controller is minimized by GA in each iteration. In this paper, integral of square error is selected to be minimized as a fitness function for the design of optimal controllers [
29]. The GA applied in this research has the following settings: population type: double vector, population size: 20. The Elite count reproduction: 2 and the crossover fraction: 0.8. To avoid premature convergence to local optima, the best set of parameters for the optimization problem are selected by adapting the number of population members and number of generations in addition to increasing the mutation rate in GA toolbox in MATLAB.
7. Tertiary Voltage Control
Tertiary Voltage Control (TerVC) is responsible for changing the setting point of the pilot bus voltages in order to implement Secondary Voltage Control (SecVC) based on optimal load flow process.
Figure 6 shows the voltage control hierarchy. The optimal load flow is applied based on the following description:
Objective function: minimization of total active power losses.
Variables: buses voltage (magnitude and angle) and each renewable park/farm active and reactive power
Constraints: the optimization process is subjected to the following conditions:
Generating limits for each renewable park/farm
Bus voltage magnitude level limits
Each line loading thermal limit
In (14), the maximum and minimum voltage values differ from one operating condition to another. During normal operation, the minimum and maximum limits should be 95 % and 105% of the rated bus voltage magnitude, respectively, while during contingency (generator outage or line outage) the limits should be 90% and 110% of the rated bus voltage magnitude, respectively.
8. Proposed Control Strategy
The idea in this paper is that in high penetration level of renewables, the renewable power plants should support the voltage of loads at PQ buses in case of contingencies. In this research, we consider a 100% renewable 14-bus system with a very high penetration level of wind and photovoltaic generation, as shown in
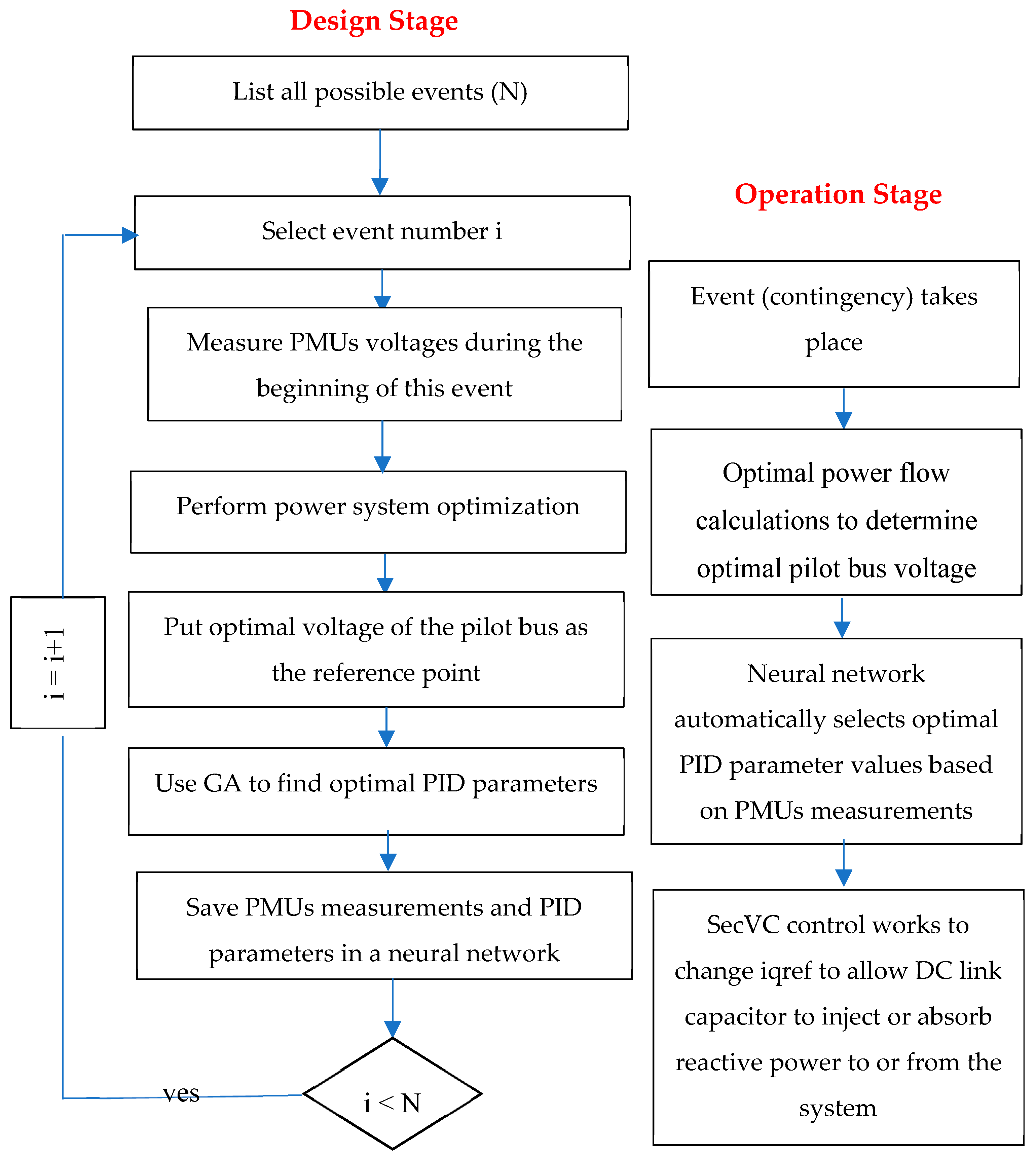
Figure 1. The voltage control strategy explained in
Figure 8 includes two stages: the design stage, which is basically made to enable the grid to optimally behave during any operation stage through optimization process and artificial intelligence. During the operation stage, the system will be able to detect its entire case the optimal values of this case (certain contingency) and the controllers should work properly to reach those optimal values. The design stage flow chart shows that at different conditions of the power system optimal values change. In this study a renewable plant outage will be assumed, and the power system optimization process will take place in order to minimize the total power loss taking into considerations voltages, active, reactive power limits. The optimization will be performed using the DIgSILENT power factory software.
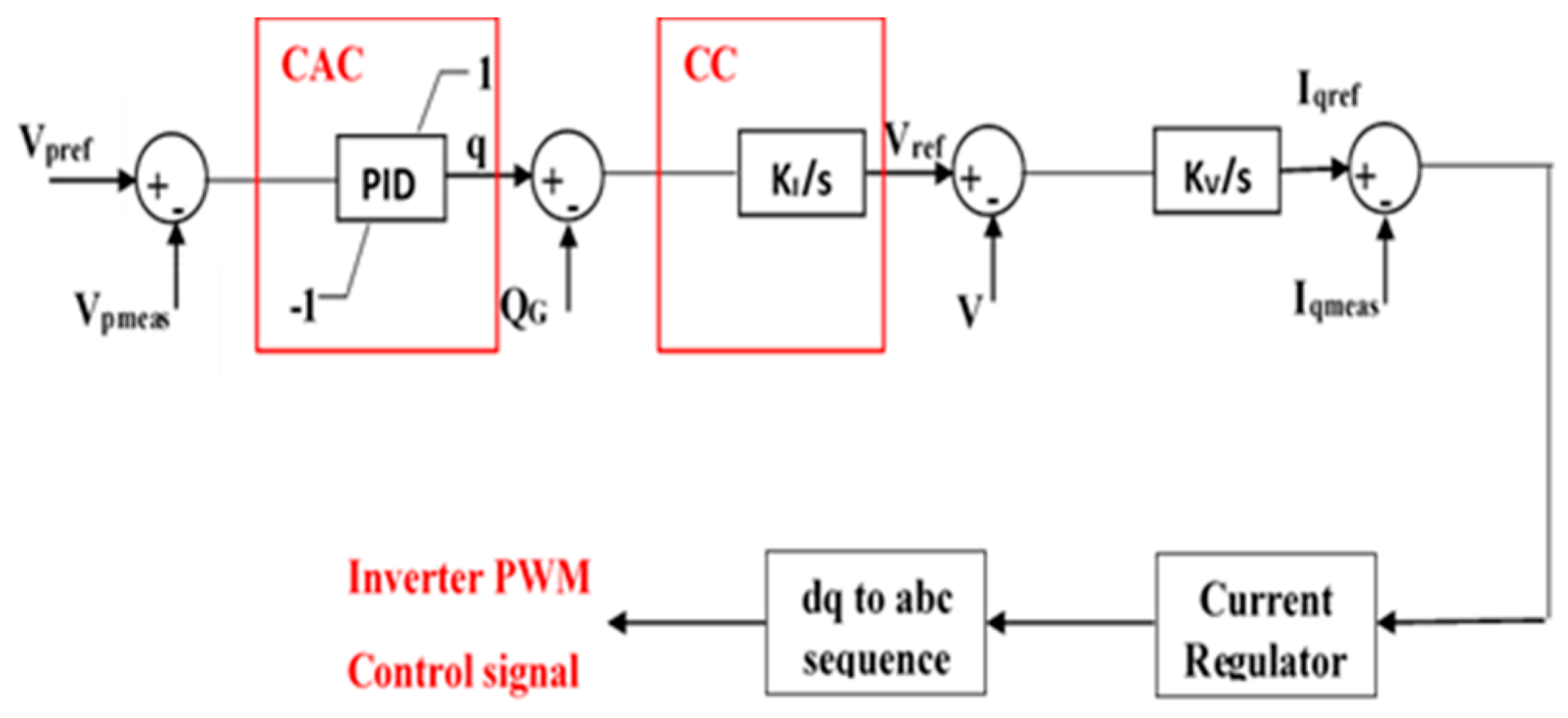
The secondary voltage control scheme, which is shown in
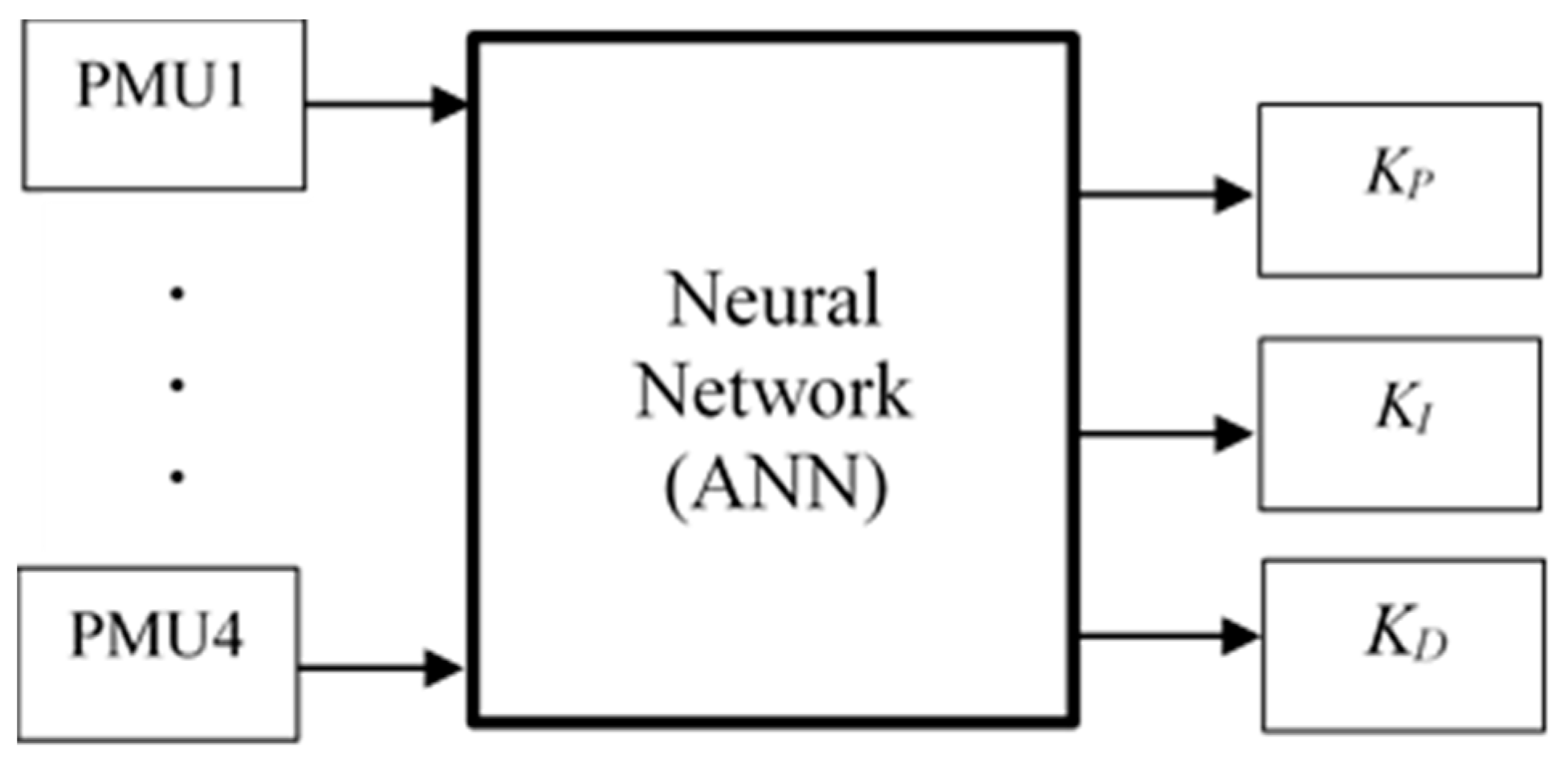
Figure 7, includes parameters that are driven from the power system directly except the coordinated PID controller parameters, which is designed to track the reference value of the pilot load bus at a time range longer than that of the PriVC. The 100% renewable power network is subjected to different large disturbance, such as the outage of part of a renewable power plant or an outage of a transmission line. In each disturbance, the optimal parameters of the coordinated PID controller will differ due to the change of the power system configuration at each operating condition; moreover, the pilot bus voltage reference will change based on TerVC at each operating case. To solve this problem, an artificial intelligence element is used. The element is chosen to be the neural network to work based on what-if analysis such that it will be able to optimally tune the coordinated PID based on the operating condition. The neural network will select optimal PID controller parameters according to the operating condition that is determined by PMUs readings as shown in
Figure 9.
The neural network is designed as follows in MATLAB/SIMULINK:
No. of inputs: four (since the network has 4 PMUs)
No. of outputs: three (coordinated PID controller parameters)
Hidden layer: one hidden layer with 10 neurons
Training method: Lavenberg–Marquardt back propagation method
To beat the curse of dimensionality of ANN, all of the possible contingencies are considered, and optimal controllers are created based on genetic algorithm for each contingency.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















