
Microrobots Based on Smart Materials with Their Manufacturing Methods and Applications

 ,
,  and
and
Abstract
:1. Introduction
2. Smart Materials That Respond to Different Stimuli
2.1. Light-Driven Materials


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power | Materials | Deformation Mechanisms | Manufacturing Method | Application Function | Reference |
|---|---|---|---|---|---|
| Light | 4-Methoxybenzoic acid 4-(6-acryloyloxyhexyloxy)phenyl ester | Molecular arrangement change | Lithography | Grab objects and roll | [39,43] |
| polydimethylsiloxane, Graphene | Coefficient of thermal expansion | Die-turning method | Bionic fish, tracked robot | [46,47] | |
| Ink, polyethylene terephthalate, acrylic acid | Multilayer construction | Die-turning method | Crawling robot | [48] | |
| Titanate nanosheet, poly(N-isopropyl acrylamide), gold nanoparticles | Material electrostatic repulsion | Lithography | Earthworm crawling robot | [49] | |
| N-isopropyl acrylamide | Change in water content | Projective micro stereo lithography; Two-photon polymerization | Bionic flower, microgripper, double arm micro driver, bionic jellyfish | [41,50,51] | |
| polyethylene | Coefficient of thermal expansion | Die-turning method | capture | [52] | |
| Fe3O4, graphene oxide | Differences in absorbency | Die-turning method | tongs | [45] | |
| Temperature | Graphene, polyethylene | Differences in thermal stress | Die-turning method | Bionic flower | [53] |
| poly(N-isopropyl acrylamide), poly(acrylic acid-co-acrylamide) | Thermal response expansion | Die-turning method | Bionic flower, grab | [26] | |
| poly (D,L-lactide-co-trimethylene carbonate), poly (trimethylene carbonate), Fe3O4 | Molecular arrangement change | Direct ink writing | Bionic flower | [54] | |
| Polylactic acid, Polycaprolactone | Molecular chain change | Direct ink writing | Bionic flower | [29] | |
| N-Isopropylacrylamide, graphene oxide | Thermal response expansion | Electrochemical reduction; Die-turning method | Bionic flower, grab action | [20,55] | |
| Humidity | graphene oxide, poly(methyl methacrylate) | Different water solubility | Die-turning method | tongs | [56] |
| cellulose nanofibers, carbon nanotubes, graphene oxide | Different water absorption | Die-turning method | Gripper, humidity switch | [57] | |
| Magnetism | Polydimethylsiloxane, NdFeB | Magnetic force action | Die-turning method; Direct ink writing | Swimming robot, bionic turtle, microgripper | [28,58,59] |
| Ecoflex, NdFeB | Magnetic force action | Die-turning method | Swimming robot | [60,61] | |
| PH | acrylic acid, N-isopropylacrylamide | Electrostatic stress difference | Direct laser writing | Bionic flower, bionic fish | [34,62] |
| chitosan and, carboxymethylcellulose | Differences in expansion | Die-turning method | capture | [63] |
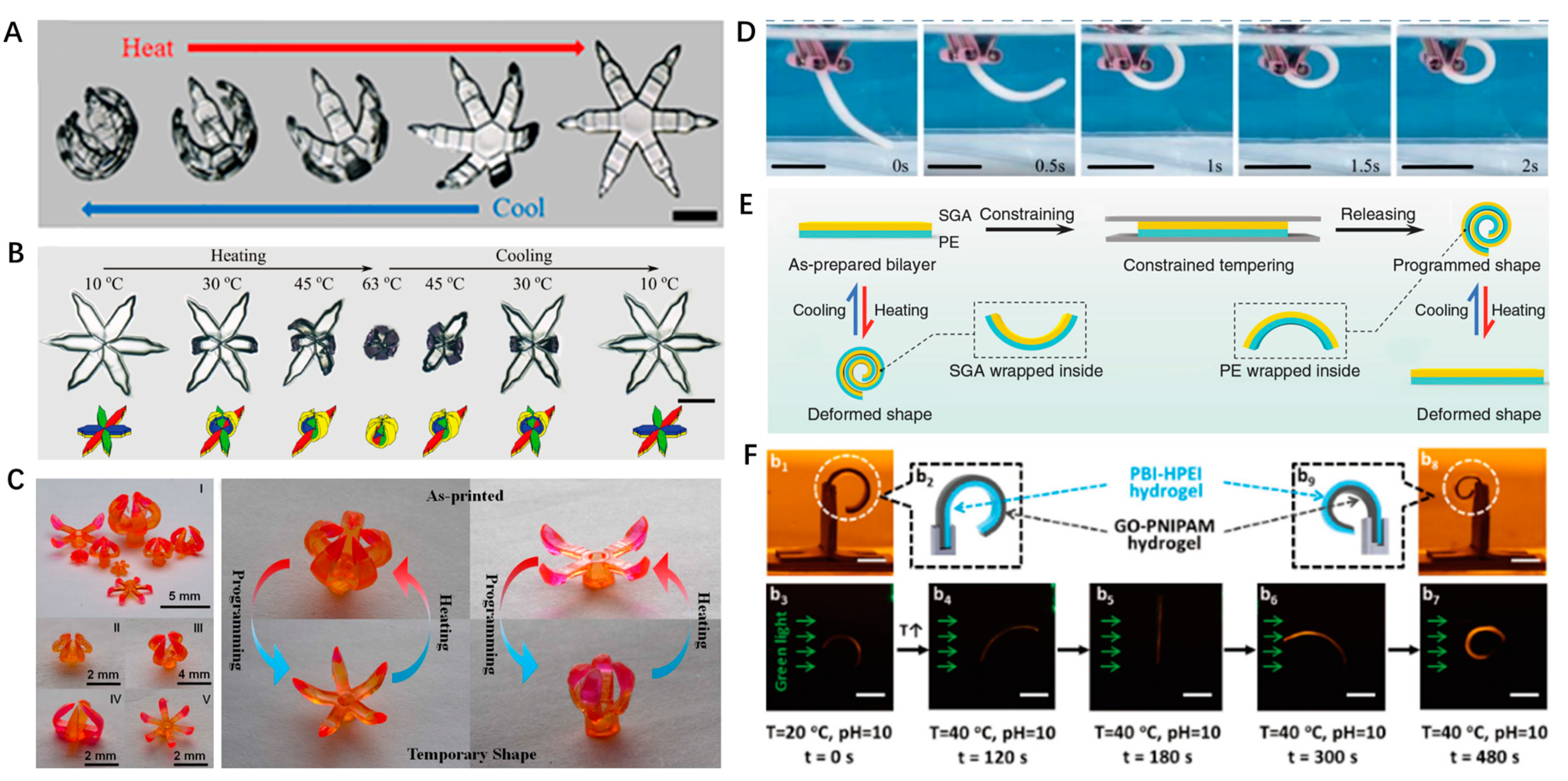
2.2. Temperature-Driven Materials
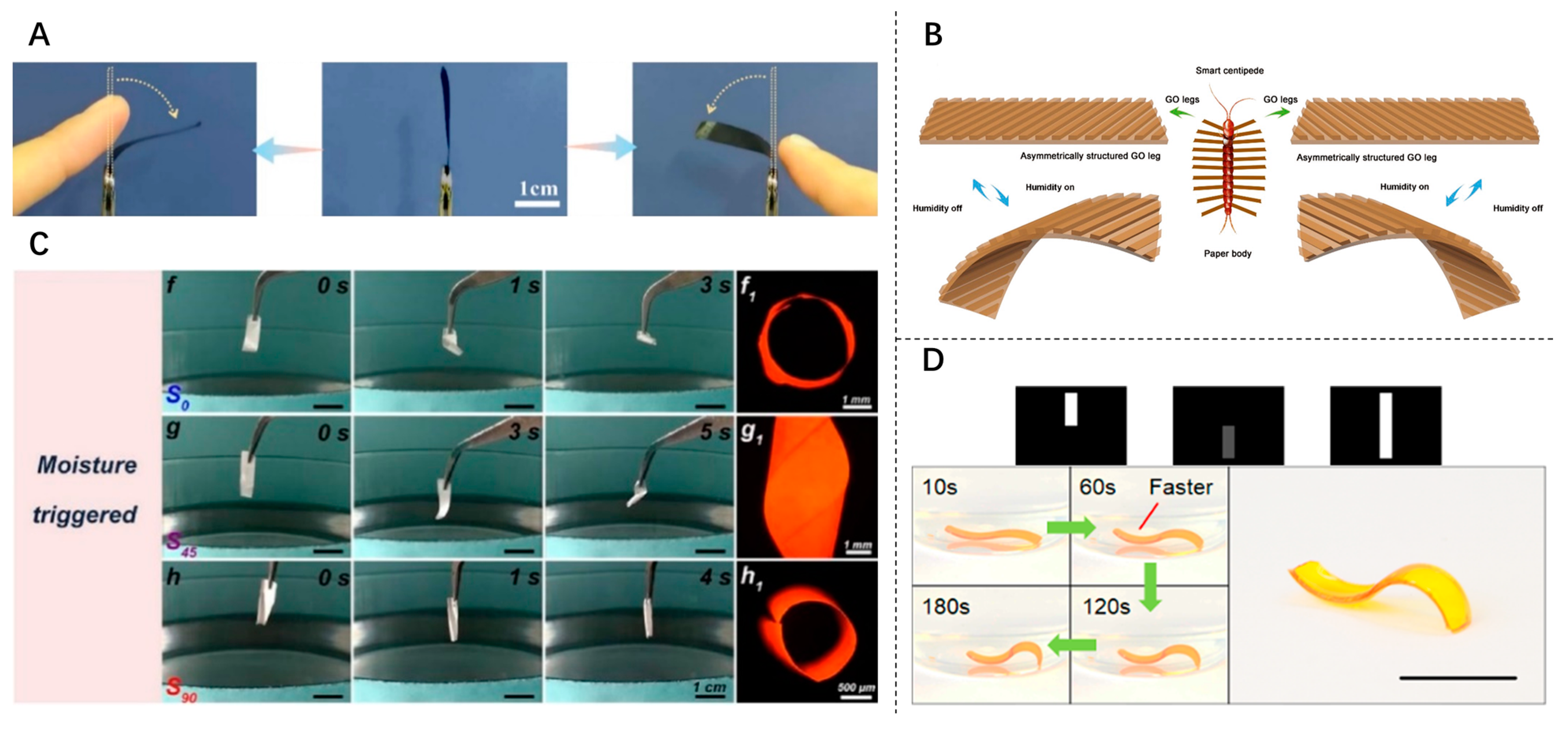
2.3. Moisture-Driven Materials
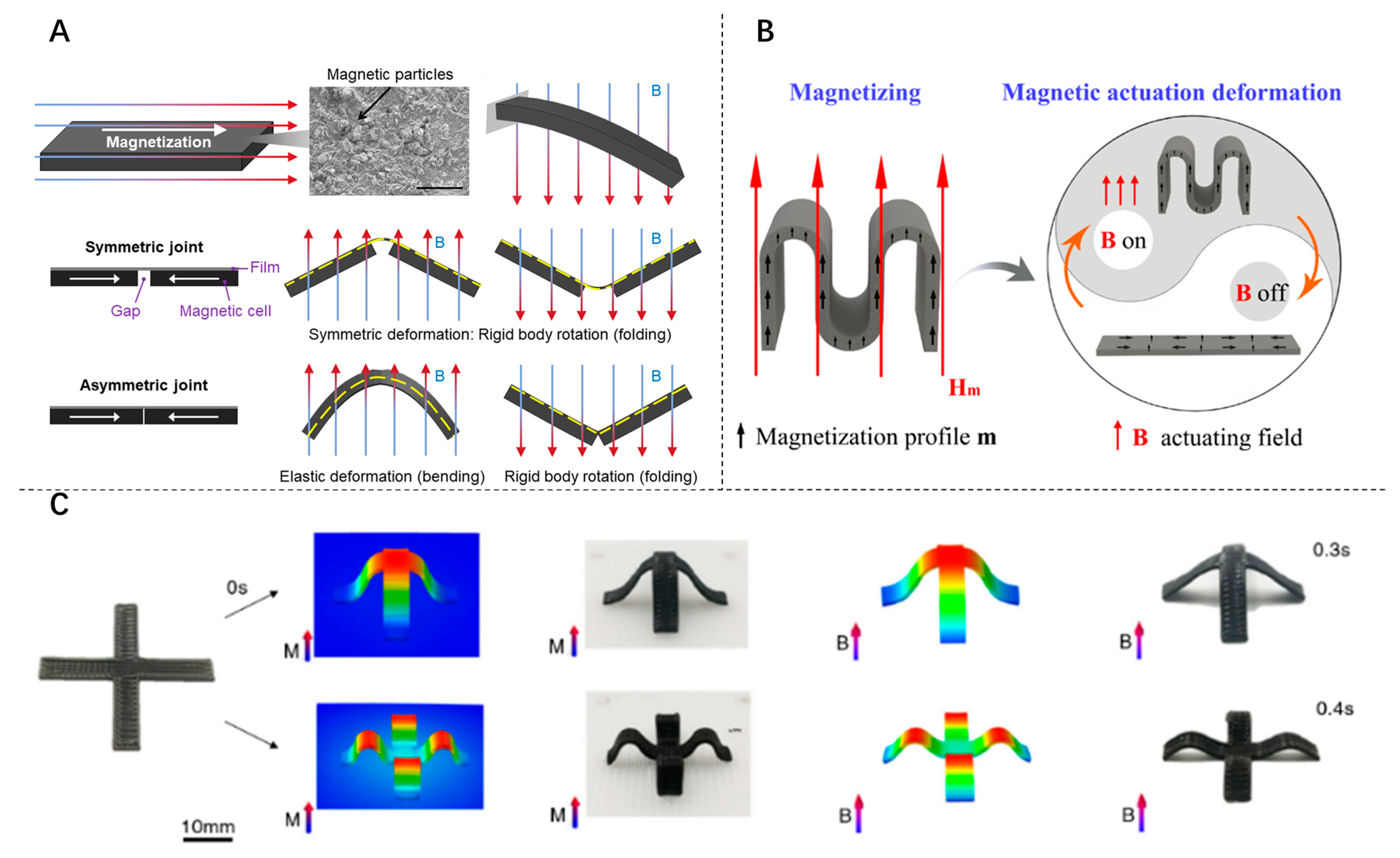
2.4. Materials for Magnetic Drive
2.5. pH-Driven Materials
2.6. Materials for Electric Drive

2.7. Hybrid Stimulus-Driven Material
3. Manufacturing Method
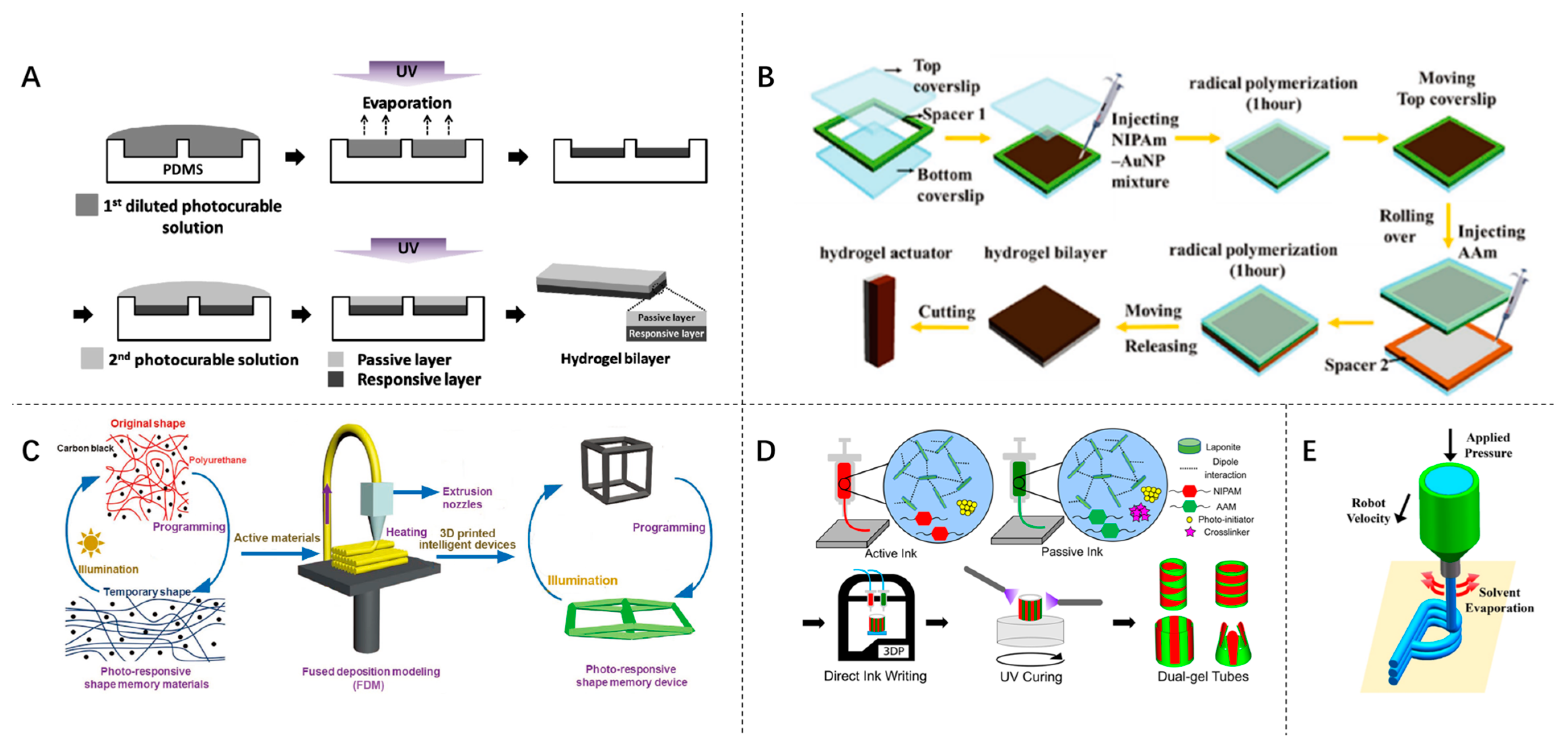
3.1. Flip-Mold Method
3.2. Direct Ink Writing (DIW)
3.3. Fused Deposition Modeling (FDM)
3.4. Photolithography
3.5. Projection Micro-Stereolithography (PμSL)
3.6. Two-Photon Polymerization (TPP)

4. Functions and Biomedical Applications
4.1. Functions
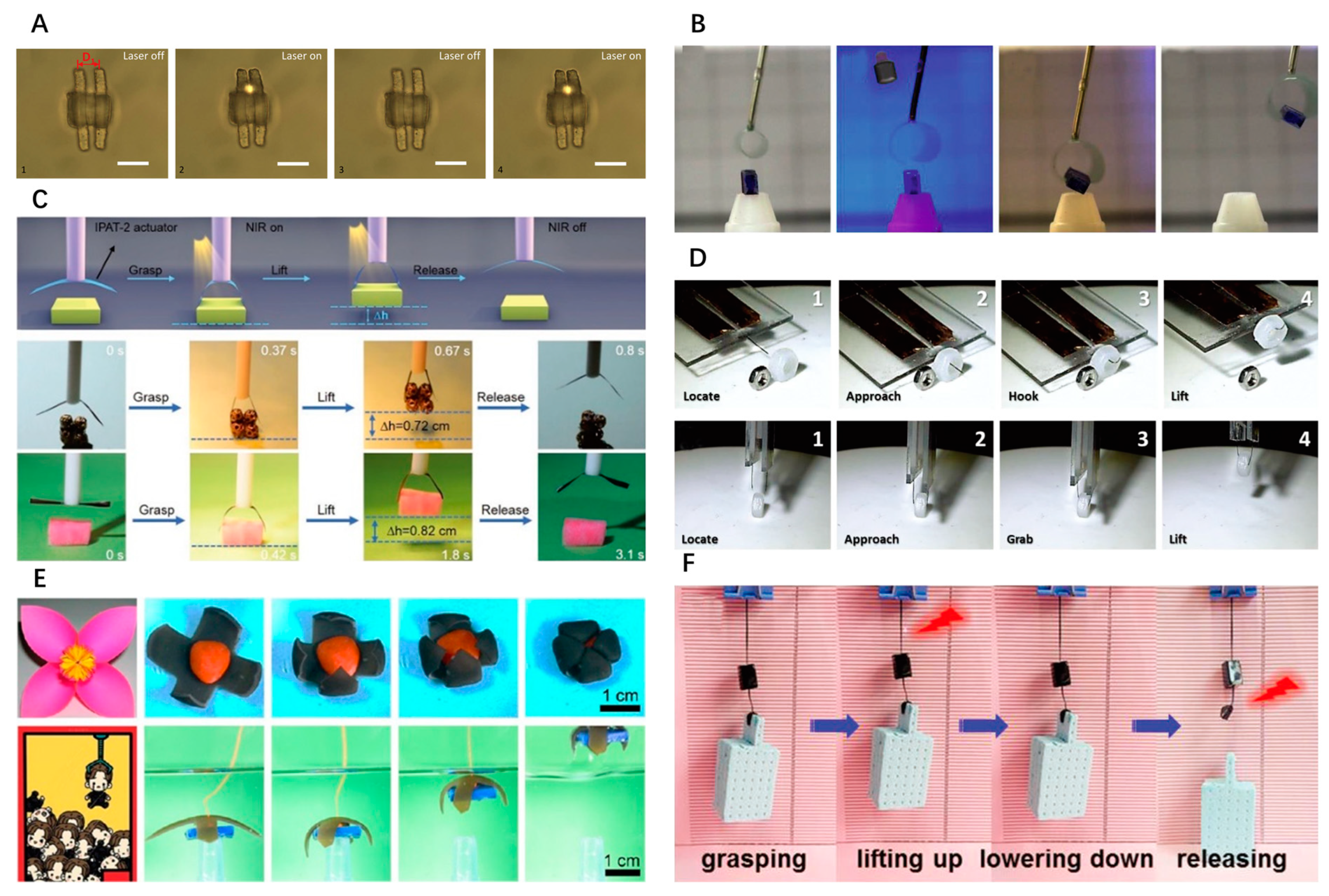
4.1.1. Grabbing Action Function
4.1.2. Scrolling and Crawling
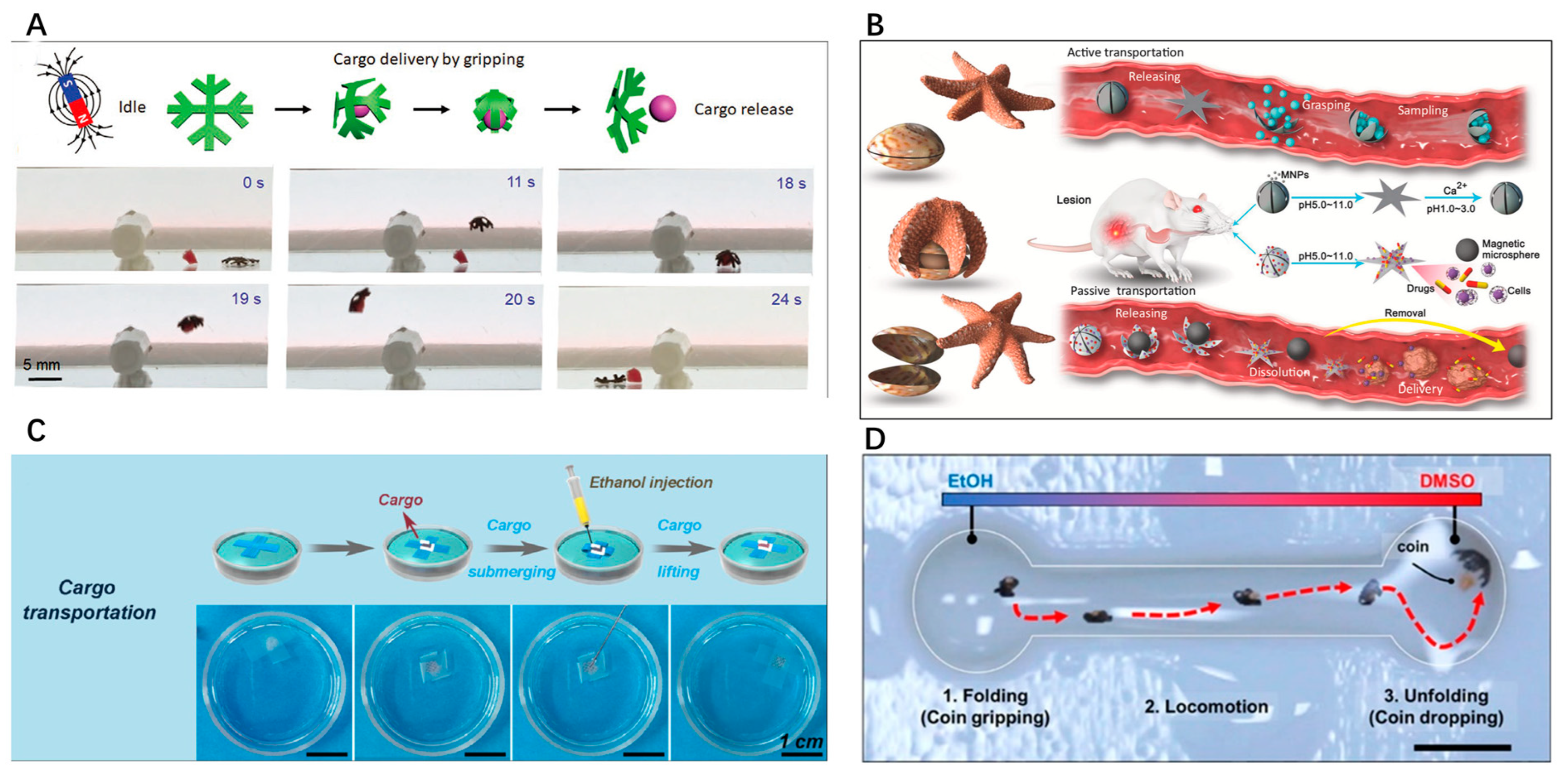
4.1.3. Transporting Objects
4.2. Biomedical Applications
4.2.1. Target Capture

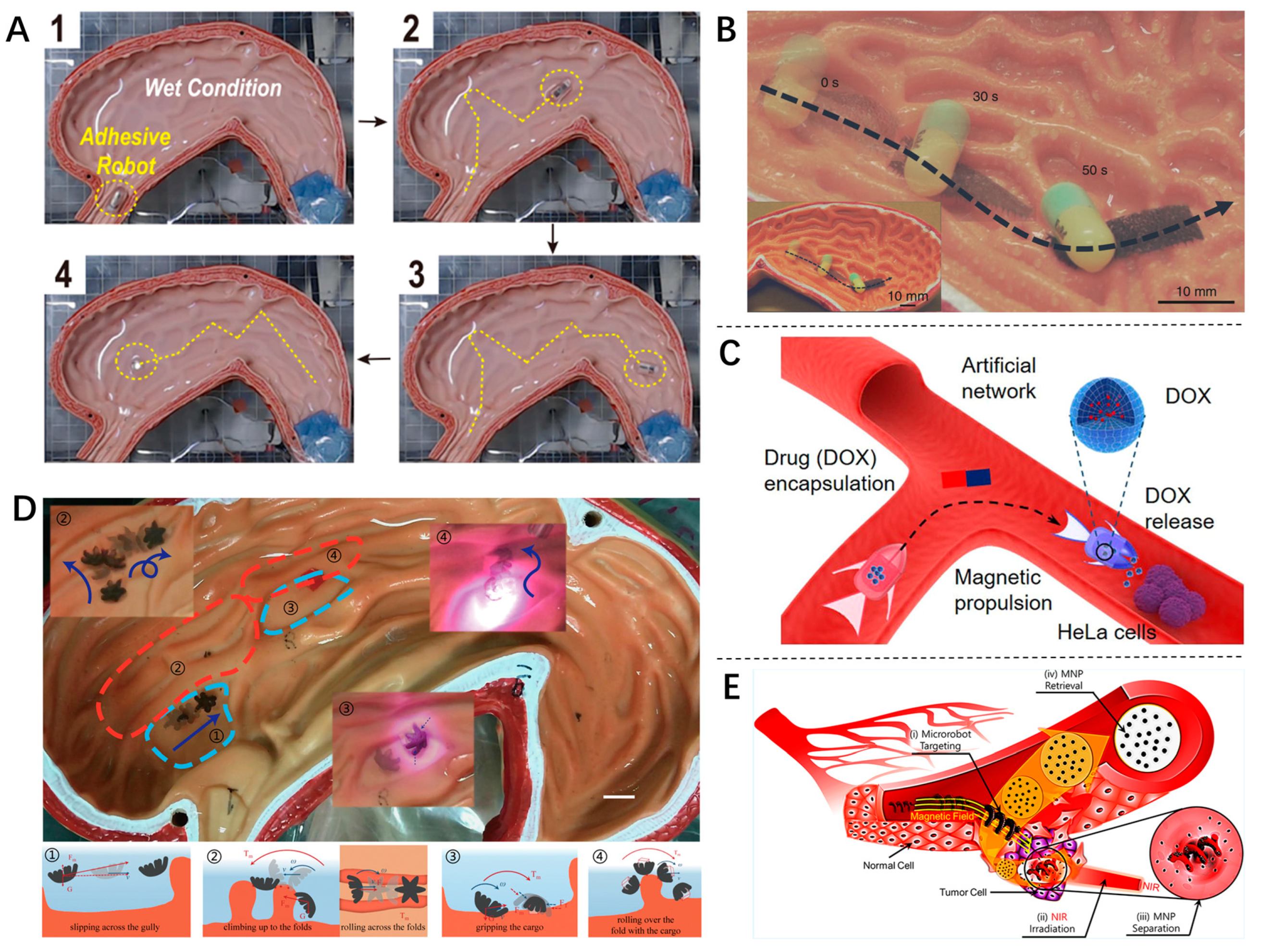
4.2.2. Vascular Therapy
4.2.3. Transportation of Drugs
4.2.4. Cellular Transport
5. Future Perspectives and Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| 3D | Three-dimensional |
| 6HCA | 4-(6-Hydroxy hexyloxy) cinnamic acid |
| AA | Acrylic acid |
| CAD | Computer aided design |
| CTE | Coefficient of thermal expansion |
| DC | Direct current |
| DIW | Direct ink writing |
| FDM | Fused deposition modeling |
| GO | Graphene oxide |
| LCP | Liquid crystal polymers |
| LCST | Low critical solubility temperature |
| NIPAM | N-isopropyl acrylamide |
| PDMS | Polydimethylsiloxane |
| PE | Polyethylene |
| PEGDA | Poly(ethylene glycol) diacrylate |
| PET | Polyethylene glycol terephthalate |
| PH | Potential of hydrogen |
| PMMA | Poly(methyl methacrylate) |
| PNIPAM | Poly(N-isopropylacrylamide) |
| PPy | Polypyrrole |
| PμSL | Projection micro-stereolithography |
| SDS | Sodium dodecyl sulfate |
| SLA | Stereolithography |
| TPP | Two-photon polymerization |
| UV | Ultraviolet |
| ZIFT | Zygote intrafallopian transfer |
References
- Galambos, P. Cloud, Fog, and Mist Computing: Advanced Robot Applications. IEEE Syst. Man Cybern. Mag. 2020, 6, 41–45. [Google Scholar] [CrossRef]
- Campeau-Lecours, A.; Lamontagne, H.; Latour, S.; Fauteux, P.; Maheu, V.; Boucher, F.; Deguire, C.; L’Ecuyer, L.-J.C. Kinova Modular Robot Arms for Service Robotics Applications. In Rapid Automation: Concepts, Methodologies, Tools, and Applications; Information Resources Management Association, Ed.; IGI Global: Hershey, PA, USA, 2019; pp. 693–719. [Google Scholar]
- Alatise, M.B.; Hancke, G.P. A Review on Challenges of Autonomous Mobile Robot and Sensor Fusion Methods. IEEE Access 2020, 8, 39830–39846. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Vaish, A.; Vaishya, R.; Iyengar, K.P. Robotics Applications in COVID-19: A Review. J. Ind. Integr. Manag. 2020, 5, 441–451. [Google Scholar] [CrossRef]
- Waterman, M.; Gralnek, I.M. Capsule Endoscopy of the Esophagus. J. Clin. Gastroenterol. 2009, 43, 605–612. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, D.; Da, L. Remote-controlled vascular interventional surgery robot. Int. J. Med. Robot. Comput. Assist. Surg. 2010, 6, 194–201. [Google Scholar] [CrossRef] [PubMed]
- Soto, F.; Karshalev, E.; Zhang, F.; Esteban Fernandez de Avila, B.; Nourhani, A.; Wang, J. Smart Materials for Microrobots. Chem. Rev. 2022, 122, 5365–5403. [Google Scholar] [CrossRef]
- Sideris, E.A.; de Lange, H.C. Pumps operated by solid-state electromechanical smart material actuators—A review. Sens. Actuators A 2020, 307, 111915. [Google Scholar] [CrossRef]
- Jin, X.; Feng, C.; Ponnamma, D.; Yi, Z.; Parameswaranpillai, J.; Thomas, S.; Salim, N.V. Review on exploration of graphene in the design and engineering of smart sensors, actuators and soft robotics. Chem. Eng. J. Adv. 2020, 4, 100034. [Google Scholar] [CrossRef]
- Arab Hassani, F.; Shi, Q.; Wen, F.; He, T.; Haroun, A.; Yang, Y.; Feng, Y.; Lee, C. Smart materials for smart healthcare—Moving from sensors and actuators to self-sustained nanoenergy nanosystems. Smart Mater. Med. 2020, 1, 92–124. [Google Scholar] [CrossRef]
- Bogue, R. Smart materials: A review of recent developments. Assem. Autom. 2012, 32, 3–7. [Google Scholar] [CrossRef]
- Wu, B.-Y.; Le, X.-X.; Jian, Y.-K.; Lu, W.; Yang, Z.-Y.; Zheng, Z.-K.; Théato, P.; Zhang, J.-W.; Zhang, A.; Chen, T. pH and Thermo Dual-Responsive Fluorescent Hydrogel Actuator. Macromol. Rapid Commun. 2019, 40, 1800648. [Google Scholar] [CrossRef] [PubMed]
- Umair, M.; Sas, C.; Latif, M.H. Towards Affective Chronometry: Exploring Smart Materials and Actuators for Real-time Representations of Changes in Arousal. In Proceedings of the 2019 on Designing Interactive Systems Conference, San Diego, CA, USA, 23–28 June 2019; pp. 1479–1494. [Google Scholar]
- Huang, Y.; Li, J.; Xiang, Y.; Li, N.; Li, F.; Yang, T. Asymmetrical layered assemblies of graphene oxide for programmable actuation devices. Smart Mater. Struct. 2020, 29, 115048. [Google Scholar] [CrossRef]
- Zhang, L.; Pan, J.; Gong, C.; Zhang, A. Multidirectional biomimetic deformation of microchannel programmed metal nanowire liquid crystal networks. J. Mater. Chem. C 2019, 7, 10663–10671. [Google Scholar] [CrossRef]
- Lahikainen, M.; Zeng, H.; Priimagi, A. Reconfigurable photoactuator through synergistic use of photochemical and photothermal effects. Nat. Commun. 2018, 9, 4148. [Google Scholar] [CrossRef] [PubMed]
- Zuo, B.; Wang, M.; Lin, B.-P.; Yang, H. Visible and infrared three-wavelength modulated multi-directional actuators. Nat. Commun. 2019, 10, 4539. [Google Scholar] [CrossRef] [PubMed]
- Ge, Q.; Sakhaei, A.H.; Lee, H.; Dunn, C.K.; Fang, N.X.; Dunn, M.L. Multimaterial 4D Printing with Tailorable Shape Memory Polymers. Sci. Rep. 2016, 6, 31110. [Google Scholar] [CrossRef] [PubMed]
- van Manen, T.; Janbaz, S.; Zadpoor, A.A. Programming 2D/3D shape-shifting with hobbyist 3D printers. Mater. Horiz. 2017, 4, 1064–1069. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wang, J.; Chen, Z.; Fang, S.; Zhu, Y.; Baughman, R.H.; Jiang, L. Tunable, Fast, Robust Hydrogel Actuators Based on Evaporation-Programmed Heterogeneous Structures. Chem. Mater. 2017, 29, 9793–9801. [Google Scholar] [CrossRef]
- Jin, Q.; Yang, Y.; Jackson, J.A.; Yoon, C.; Gracias, D.H. Untethered Single Cell Grippers for Active Biopsy. Nano Lett. 2020, 20, 5383–5390. [Google Scholar] [CrossRef]
- Mao, Y.; Ding, Z.; Yuan, C.; Ai, S.; Isakov, M.; Wu, J.; Wang, T.; Dunn, M.L.; Qi, H.J. 3D Printed Reversible Shape Changing Components with Stimuli Responsive Materials. Sci. Rep. 2016, 6, 24761. [Google Scholar] [CrossRef]
- Gu, H.; Boehler, Q.; Cui, H.; Secchi, E.; Savorana, G.; De Marco, C.; Gervasoni, S.; Peyron, Q.; Huang, T.-Y.; Pane, S.; et al. Magnetic cilia carpets with programmable metachronal waves. Nat. Commun. 2020, 11, 2637. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Zhang, J.; Salehizadeh, M.; Onaizah, O.; Diller, E. Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions. Sci. Robot. 2019, 4, eaav4494. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Zheng, J.; Xiao, P.; Le, X.; Lu, W.; Théato, P.; Ma, C.; Du, B.; Zhang, J.; Huang, Y.; Chen, T. Mimosa inspired bilayer hydrogel actuator functioning in multi-environments. J. Mater. Chem. C 2018, 6, 1320–1327. [Google Scholar] [CrossRef]
- Zhao, L.; Huang, J.; Zhang, Y.; Wang, T.; Sun, W.; Tong, Z. Programmable and Bidirectional Bending of Soft Actuators Based on Janus Structure with Sticky Tough PAA-Clay Hydrogel. ACS Appl. Mater. Interfaces 2017, 9, 11866–11873. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Q.; Yi, S.; Lin, Z.; Wang, C.; Chen, Z.; Jiang, L. 4D Printing of Magnetoactive Soft Materials for On-Demand Magnetic Actuation Transformation. ACS Appl. Mater. Interfaces 2021, 13, 4174–4184. [Google Scholar] [CrossRef]
- Ma, S.; Jiang, Z.; Wang, M.; Zhang, L.; Liang, Y.; Zhang, Z.; Ren, L.; Ren, L. 4D printing of PLA/PCL shape memory composites with controllable sequential deformation. Bio-Des. Manuf. 2021, 4, 867–878. [Google Scholar] [CrossRef]
- Liu, J.; Erol, O.; Pantula, A.; Liu, W.; Jiang, Z.; Kobayashi, K.; Chatterjee, D.; Hibino, N.; Romer, L.H.; Kang, S.H.; et al. Dual-Gel 4D Printing of Bioinspired Tubes. ACS Appl. Mater. Interfaces 2019, 11, 8492–8498. [Google Scholar] [CrossRef] [PubMed]
- Kobayashi, K.; Yoon, C.; Oh, S.H.; Pagaduan, J.V.; Gracias, D.H. Biodegradable Thermomagnetically Responsive Soft Untethered Grippers. ACS Appl. Mater. Interfaces 2019, 11, 151–159. [Google Scholar] [CrossRef]
- Goudu, S.R.; Yasa, I.C.; Hu, X.; Ceylan, H.; Hu, W.; Sitti, M. Biodegradable Untethered Magnetic Hydrogel Milli-Grippers. Adv. Funct. Mater. 2020, 30, 2004975. [Google Scholar] [CrossRef]
- Kobayashi, K.; Oh, S.H.; Yoon, C.; Gracias, D.H. Multitemperature Responsive Self-Folding Soft Biomimetic Structures. Macromol. Rapid Commun. 2018, 39, 1700692. [Google Scholar] [CrossRef] [PubMed]
- Jin, D.; Chen, Q.; Huang, T.-Y.; Huang, J.; Zhang, L.; Duan, H. Four-dimensional direct laser writing of reconfigurable compound micromachines. Mater. Today 2020, 32, 19–25. [Google Scholar] [CrossRef]
- Stoychev, G.; Kirillova, A.; Ionov, L. Light-Responsive Shape-Changing Polymers. Adv. Opt. Mater. 2019, 7, 1900067. [Google Scholar] [CrossRef]
- Ze, Q.; Kuang, X.; Wu, S.; Wong, J.; Montgomery, S.M.; Zhang, R.; Kovitz, J.M.; Yang, F.; Qi, H.J.; Zhao, R. Magnetic Shape Memory Polymers with Integrated Multifunctional Shape Manipulation. Adv. Mater. 2020, 32, e1906657. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Qian, X.; Xu, Y.; Yang, Y.; Wei, Y.; Ji, Y. Harnessing the Day-Night Rhythm of Humidity and Sunlight into Mechanical Work Using Recyclable and Reprogrammable Soft Actuators. ACS Appl. Mater. Interfaces 2019, 11, 29290–29297. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Shi, D.; Wang, X.; Chen, Y.; Yuan, Z.; Li, Y.; Ge, Z.; Yang, W. A Multifunctional Light-Driven Swimming Soft Robot for Various Application Scenarios. Int. J. Mol. Sci. 2022, 23, 9609. [Google Scholar] [CrossRef]
- Wani, O.M.; Zeng, H.; Priimagi, A. A light-driven artificial flytrap. Nat. Commun. 2017, 8, 15546. [Google Scholar] [CrossRef]
- Pilz da Cunha, M.; Debije, M.G.; Schenning, A.P.H.J. Bioinspired light-driven soft robots based on liquid crystal polymers. Chem. Soc. Rev. 2020, 49, 6568–6578. [Google Scholar] [CrossRef] [PubMed]
- Zheng, C.; Jin, F.; Zhao, Y.; Zheng, M.; Liu, J.; Dong, X.; Xiong, Z.; Xia, Y.; Duan, X. Light-driven micron-scale 3D hydrogel actuator produced by two-photon polymerization microfabrication. Sens. Actuators B 2020, 304, 127345. [Google Scholar] [CrossRef]
- Zhang, H.; Koens, L.; Lauga, E.; Mourran, A.; Möller, M. A Light-Driven Microgel Rotor. Small 2019, 15, 1903379. [Google Scholar] [CrossRef]
- Cheng, Y.-C.; Lu, H.-C.; Lee, X.; Zeng, H.; Priimagi, A. Kirigami-Based Light-Induced Shape-Morphing and Locomotion. Adv. Mater. 2020, 32, 1906233. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Pan, J.; Liu, Y.; Xu, Y.; Zhang, A. NIR–UV Responsive Actuator with Graphene Oxide/Microchannel-Induced Liquid Crystal Bilayer Structure for Biomimetic Devices. ACS Appl. Mater. Interfaces 2020, 12, 6727–6735. [Google Scholar] [CrossRef] [PubMed]
- Han, B.; Gao, Y.-Y.; Zhang, Y.-L.; Liu, Y.-Q.; Ma, Z.-C.; Guo, Q.; Zhu, L.; Chen, Q.-D.; Sun, H.-B. Multi-field-coupling energy conversion for flexible manipulation of graphene-based soft robots. Nano Energy 2020, 71, 104578. [Google Scholar] [CrossRef]
- Wang, X.; Jiao, N.; Tung, S.; Liu, L. Photoresponsive Graphene Composite Bilayer Actuator for Soft Robots. ACS Appl. Mater. Interfaces 2019, 11, 30290–30299. [Google Scholar] [CrossRef]
- Hu, Y.; Wu, G.; Lan, T.; Zhao, J.; Liu, Y.; Chen, W. A Graphene-Based Bimorph Structure for Design of High Performance Photoactuators. Adv. Mater. (Deerfield Beach Fla.) 2015, 27, 7867–7873. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Zhang, R.; Mou, L.; Jung de Andrade, M.; Hu, X.; Yu, K.; Sun, J.; Jia, T.; Dou, Y.; Chen, H.; et al. Photothermal Bimorph Actuators with In-Built Cooler for Light Mills, Frequency Switches, and Soft Robots. Adv. Funct. Mater. 2019, 29, 1808995. [Google Scholar] [CrossRef]
- Sun, Z.; Yamauchi, Y.; Araoka, F.; Kim, Y.S.; Bergueiro, J.; Ishida, Y.; Ebina, Y.; Sasaki, T.; Hikima, T.; Aida, T. An Anisotropic Hydrogel Actuator Enabling Earthworm-Like Directed Peristaltic Crawling. Angew. Chem. Int. Ed. 2018, 57, 15772–15776. [Google Scholar] [CrossRef] [PubMed]
- Zhan, Z.; Chen, L.; Duan, H.; Chen, Y.; He, M.; Wang, Z. 3D printed ultra-fast photothermal responsive shape memory hydrogel for microrobots. Int. J. Extrem. Manuf. 2022, 4, 015302. [Google Scholar] [CrossRef]
- Li, C.; Lau, G.C.; Yuan, H.; Aggarwal, A.; Dominguez, V.L.; Liu, S.; Sai, H.; Palmer, L.C.; Sather, N.A.; Pearson, T.J.; et al. Fast and programmable locomotion of hydrogel-metal hybrids under light and magnetic fields. Sci. Robot. 2020, 5, eabb9822. [Google Scholar] [CrossRef] [PubMed]
- Pan, X.; Grossiord, N.; Sol, J.A.H.P.; Debije, M.G.; Schenning, A.P.H.J. 3D Anisotropic Polyethylene as Light-Responsive Grippers and Surfing Divers. Adv. Funct. Mater. 2021, 31, 2100465. [Google Scholar] [CrossRef]
- Wang, S.; Gao, Y.; Wei, A.; Xiao, P.; Liang, Y.; Lu, W.; Chen, C.; Zhang, C.; Yang, G.; Yao, H.; et al. Asymmetric elastoplasticity of stacked graphene assembly actualizes programmable untethered soft robotics. Nat. Commun. 2020, 11, 4359. [Google Scholar] [CrossRef] [PubMed]
- Wan, X.; He, Y.; Liu, Y.; Leng, J. 4D printing of multiple shape memory polymer and nanocomposites with biocompatible, programmable and selectively actuated properties. Addit. Manuf. 2022, 53, 102689. [Google Scholar] [CrossRef]
- Peng, X.; Jiao, C.; Zhao, Y.; Chen, N.; Wu, Y.; Liu, T.; Wang, H. Thermoresponsive Deformable Actuators Prepared by Local Electrochemical Reduction of Poly(N-isopropylacrylamide)/Graphene Oxide Hydrogels. ACS Appl. Nano Mater. 2018, 1, 1522–1530. [Google Scholar] [CrossRef]
- Gao, Y.-Y.; Zhang, Y.-L.; Han, B.; Zhu, L.; Dong, B.; Sun, H.-B. Gradient Assembly of Polymer Nanospheres and Graphene Oxide Sheets for Dual-Responsive Soft Actuators. ACS Appl. Mater. Interfaces 2019, 11, 37130–37138. [Google Scholar] [CrossRef]
- Wei, J.; Jia, S.; Guan, J.; Ma, C.; Shao, Z. Robust and Highly Sensitive Cellulose Nanofiber-Based Humidity Actuators. ACS Appl. Mater. Interfaces 2021, 13, 54417–54427. [Google Scholar] [CrossRef]
- Zhu, H.; He, Y.; Wang, Y.; Zhao, Y.; Jiang, C. Mechanically-Guided 4D Printing of Magnetoresponsive Soft Materials across Different Length Scale. Adv. Intell. Syst. 2022, 4, 2100137. [Google Scholar] [CrossRef]
- Wu, S.; Ze, Q.; Zhang, R.; Hu, N.; Cheng, Y.; Yang, F.; Zhao, R. Symmetry-Breaking Actuation Mechanism for Soft Robotics and Active Metamaterials. ACS Appl. Mater. Interfaces 2019, 11, 41649–41658. [Google Scholar] [CrossRef]
- Ren, Z.; Wang, T.; Hu, W.; Sitti, M. A Magnetically-Actuated Untethered Jellyfish-Inspired Soft Milliswimmer. In Proceedings of the 15th Robotics: Science and Systems 2019, Freiburg im Breisgau, Germany, 22–26 June 2019. [Google Scholar]
- Ren, Z.; Hu, W.; Dong, X.; Sitti, M. Multi-functional soft-bodied jellyfish-like swimming. Nat. Commun. 2019, 10, 2703. [Google Scholar] [CrossRef]
- Xin, C.; Jin, D.; Hu, Y.; Yang, L.; Li, R.; Wang, L.; Ren, Z.; Wang, D.; Ji, S.; Hu, K.; et al. Environmentally Adaptive Shape-Morphing Microrobots for Localized Cancer Cell Treatment. ACS Nano 2021, 15, 18048–18059. [Google Scholar] [CrossRef]
- Duan, J.; Liang, X.; Zhu, K.; Guo, J.; Zhang, L. Bilayer hydrogel actuators with tight interfacial adhesion fully constructed from natural polysaccharides. Soft Matter 2017, 13, 345–354. [Google Scholar] [CrossRef]
- Liu, J.; Jiang, L.; Liu, A.; He, S.; Shao, W. Ultrafast thermo-responsive bilayer hydrogel actuator assisted by hydrogel microspheres. Sens. Actuators B 2022, 357, 131434. [Google Scholar] [CrossRef]
- Ma, C.; Lu, W.; Yang, X.; He, J.; Le, X.; Wang, L.; Zhang, J.; Serpe, M.J.; Huang, Y.; Chen, T. Bioinspired Anisotropic Hydrogel Actuators with On–Off Switchable and Color-Tunable Fluorescence Behaviors. Adv. Funct. Mater. 2018, 28, 1704568. [Google Scholar] [CrossRef]
- Ding, Z.; Yuan, C.; Peng, X.; Wang, T.; Qi, H.J.; Dunn, M.L. Direct 4D printing via active composite materials. Sci. Adv. 2017, 3, e1602890. [Google Scholar] [CrossRef] [PubMed]
- Kuang, X.; Wu, J.; Chen, K.; Zhao, Z.; Ding, Z.; Hu, F.; Fang, D.; Qi, H.J. Grayscale digital light processing 3D printing for highly functionally graded materials. Sci. Adv. 2019, 5, eaav5790. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.-L.; Liu, Y.-Q.; Han, D.-D.; Ma, J.-N.; Wang, D.; Li, X.-B.; Sun, H.-B. Quantum-Confined-Superfluidics-Enabled Moisture Actuation Based on Unilaterally Structured Graphene Oxide Papers. Adv. Mater. 2019, 31, 1901585. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Zhang, Y.-L.; Han, B.; Ma, J.-N.; Wang, J.-N.; Han, D.-D.; Ma, Z.-C.; Sun, H.-B. A complementary strategy for producing moisture and alkane dual-responsive actuators based on graphene oxide and PDMS bimorph. Sens. Actuators B 2019, 290, 133–139. [Google Scholar] [CrossRef]
- Qin, J.; Feng, P.; Wang, Y.; Du, X.; Song, B. Nanofibrous Actuator with an Alignment Gradient for Millisecond-Responsive, Multidirectional, Multimodal, and Multidimensional Large Deformation. ACS Appl. Mater. Interfaces 2020, 12, 46719–46732. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Kuang, X.; Yuan, C.; Qi, H.J.; Fang, D. Hydrophilic/Hydrophobic Composite Shape-Shifting Structures. ACS Appl. Mater. Interfaces 2018, 10, 19932–19939. [Google Scholar] [CrossRef]
- Bi, Y.; Du, X.; He, P.; Wang, C.; Liu, C.; Guo, W. Smart Bilayer Polyacrylamide/DNA Hybrid Hydrogel Film Actuators Exhibiting Programmable Responsive and Reversible Macroscopic Shape Deformations. Small 2020, 16, 1906998. [Google Scholar] [CrossRef]
- Chen, W.; Sun, M.; Fan, X.; Xie, H. Magnetic/pH-sensitive double-layer microrobots for drug delivery and sustained release. Appl. Mater. Today 2020, 19, 100583. [Google Scholar] [CrossRef]
- Umrao, S.; Tabassian, R.; Kim, J.; Nguyen, V.H.; Zhou, Q.; Nam, S.; Oh, I.-K. MXene artificial muscles based on ionically cross-linked Ti3C2Tx electrode for kinetic soft robotics. Sci. Robot. 2019, 4, eaaw7797. [Google Scholar] [CrossRef]
- Lee, H.-T.; Seichepine, F.; Yang, G.-Z. Microtentacle Actuators Based on Shape Memory Alloy Smart Soft Composite. Adv. Funct. Mater. 2020, 30, 2002510. [Google Scholar] [CrossRef]
- Xiao, Y.-Y.; Jiang, Z.-C.; Tong, X.; Zhao, Y. Biomimetic Locomotion of Electrically Powered “Janus” Soft Robots Using a Liquid Crystal Polymer. Adv. Mater. 2019, 31, 1903452. [Google Scholar] [CrossRef]
- Amjadi, M.; Sitti, M. High-Performance Multiresponsive Paper Actuators. ACS Nano 2016, 10, 10202–10210. [Google Scholar] [CrossRef]
- Wang, M.; Cheng, Z.-W.; Zuo, B.; Chen, X.-M.; Huang, S.; Yang, H. Liquid Crystal Elastomer Electric Locomotives. ACS Macro Lett. 2020, 9, 860–865. [Google Scholar] [CrossRef]
- Go, G.; Nguyen, V.D.; Jin, Z.; Park, J.-O.; Park, S. A Thermo-electromagnetically Actuated Microrobot for the Targeted Transport of Therapeutic Agents. Int. J. Control Autom. Syst. 2018, 16, 1341–1354. [Google Scholar] [CrossRef]
- Tyagi, M.; Spinks, G.M.; Jager, E.W.H. Fully 3D printed soft microactuators for soft microrobotics. Smart Mater. Struct. 2020, 29, 085032. [Google Scholar] [CrossRef]
- Li, W.; Sang, M.; Liu, S.; Wang, B.; Cao, X.; Liu, G.; Gong, X.; Hao, L.; Xuan, S. Dual-mode biomimetic soft actuator with electrothermal and magneto-responsive performance. Compos. Part B 2022, 238, 109880. [Google Scholar] [CrossRef]
- Deng, H.; Dong, Y.; Su, J.-W.; Zhang, C.; Xie, Y.; Zhang, C.; Maschmann, M.R.; Lin, Y.; Lin, J. Bioinspired Programmable Polymer Gel Controlled by Swellable Guest Medium. ACS Appl. Mater. Interfaces 2017, 9, 30900–30908. [Google Scholar] [CrossRef]
- Kim, J.; Kim, C.; Song, Y.; Jeong, S.-G.; Kim, T.-S.; Lee, C.-S. Reversible self-bending soft hydrogel microstructures with mechanically optimized designs. Chem. Eng. J. 2017, 321, 384–393. [Google Scholar] [CrossRef]
- Shi, Q.; Xia, H.; Li, P.; Wang, Y.-S.; Wang, L.; Li, S.-X.; Wang, G.; Lv, C.; Niu, L.-G.; Sun, H.-B. Photothermal Surface Plasmon Resonance and Interband Transition-Enhanced Nanocomposite Hydrogel Actuators with Hand-Like Dynamic Manipulation. Adv. Opt. Mater. 2017, 5, 1700442. [Google Scholar] [CrossRef]
- Lewis, J.A. Direct Ink Writing of 3D Functional Materials. Adv. Funct. Mater. 2006, 16, 2193–2204. [Google Scholar] [CrossRef]
- Wan, X.; Luo, L.; Liu, Y.; Leng, J. Direct Ink Writing Based 4D Printing of Materials and Their Applications. Adv. Sci. 2020, 7, 2001000. [Google Scholar] [CrossRef]
- Li, L.; Lin, Q.; Tang, M.; Duncan, A.J.E.; Ke, C. Advanced Polymer Designs for Direct-Ink-Write 3D Printing. Chem.-Eur. J. 2019, 25, 10768–10781. [Google Scholar] [CrossRef]
- Zheng, S.Y.; Shen, Y.; Zhu, F.; Yin, J.; Qian, J.; Fu, J.; Wu, Z.L.; Zheng, Q. Programmed Deformations of 3D-Printed Tough Physical Hydrogels with High Response Speed and Large Output Force. Adv. Funct. Mater. 2018, 28, 1803366. [Google Scholar] [CrossRef]
- Bastola, A.K.; Hossain, M. The shape—Morphing performance of magnetoactive soft materials. Mater. Des. 2021, 211, 110172. [Google Scholar] [CrossRef]
- Yang, H.; Leow, W.R.; Wang, T.; Wang, J.; Yu, J.; He, K.; Qi, D.; Wan, C.; Chen, X. 3D Printed Photoresponsive Devices Based on Shape Memory Composites. Adv. Mater. 2017, 29, 1701627. [Google Scholar] [CrossRef]
- Breger, J.C.; Yoon, C.; Xiao, R.; Kwag, H.R.; Wang, M.O.; Fisher, J.P.; Nguyen, T.D.; Gracias, D.H. Self-Folding Thermo-Magnetically Responsive Soft Microgrippers. ACS Appl. Mater. Interfaces 2015, 7, 3398–3405. [Google Scholar] [CrossRef]
- Joshi, S.; Rawat, K.; Karunakaran, C.; Rajamohan, V.; Mathew, A.T.; Koziol, K.; Thakur, V.K.; Balan, A.S.S. 4D printing of materials for the future: Opportunities and challenges. Appl. Mater. Today 2020, 18, 100490. [Google Scholar] [CrossRef]
- Han, D.; Yang, C.; Fang, N.X.; Lee, H. Rapid multi-material 3D printing with projection micro-stereolithography using dynamic fluidic control. Addit. Manuf. 2019, 27, 606–615. [Google Scholar] [CrossRef]
- Dabbagh, S.R.; Sarabi, M.R.; Birtek, M.T.; Seyfi, S.; Sitti, M.; Tasoglu, S. 3D-printed microrobots from design to translation. Nat. Commun. 2022, 13, 5875. [Google Scholar] [CrossRef]
- Mu, Q.; Wang, L.; Dunn, C.K.; Kuang, X.; Duan, F.; Zhang, Z.; Qi, H.J.; Wang, T. Digital light processing 3D printing of conductive complex structures. Addit. Manuf. 2017, 18, 74–83. [Google Scholar] [CrossRef]
- Wu, H.; Chen, P.; Yan, C.; Cai, C.; Shi, Y. Four-dimensional printing of a novel acrylate-based shape memory polymer using digital light processing. Mater. Des. 2019, 171, 107704. [Google Scholar] [CrossRef]
- Pan, H.M.; Sarkar, J.; Goto, A. Networking of Block Copolymer Nanoassemblies via Digital Light Processing Four-Dimensional Printing for Programmable Actuation. ACS Appl. Polym. Mater. 2022, 4, 8676–8683. [Google Scholar] [CrossRef]
- Lao, Z.; Xia, N.; Wang, S.; Xu, T.; Wu, X.; Zhang, L. Tethered and Untethered 3D Microactuators Fabricated by Two-Photon Polymerization: A Review. Micromachines 2021, 12, 465. [Google Scholar] [CrossRef]
- Koo, S. Advanced Micro-Actuator/Robot Fabrication Using Ultrafast Laser Direct Writing and Its Remote Control. Appl. Sci. 2020, 10, 8563. [Google Scholar] [CrossRef]
- Rajabasadi, F.; Schwarz, L.; Medina-Sánchez, M.; Schmidt, O.G. 3D and 4D lithography of untethered microrobots. Prog. Mater. Sci. 2021, 120, 100808. [Google Scholar] [CrossRef]
- Xiong, Z.; Zheng, C.; Jin, F.; Wei, R.; Zhao, Y.; Gao, X.; Xia, Y.; Dong, X.; Zheng, M.; Duan, X. Magnetic-field-driven ultra-small 3D hydrogel microstructures: Preparation of gel photoresist and two-photon polymerization microfabrication. Sens. Actuators B 2018, 274, 541–550. [Google Scholar] [CrossRef]
- Scarpa, E.; Lemma, E.D.; Fiammengo, R.; Cipolla, M.P.; Pisanello, F.; Rizzi, F.; De Vittorio, M. Microfabrication of pH-responsive 3D hydrogel structures via two-photon polymerization of high-molecular-weight poly(ethylene glycol) diacrylates. Sens. Actuators B 2019, 279, 418–426. [Google Scholar] [CrossRef]
- Pan, Y.; Lee, L.H.; Yang, Z.; Hassan, S.U.; Shum, H.C. Co-doping optimized hydrogel-elastomer micro-actuators for versatile biomimetic motions. Nanoscale 2021, 13, 18967–18976. [Google Scholar] [CrossRef]
- Yang, Q.; Peng, C.; Ren, J.; Zhao, W.; Zheng, W.; Zhang, C.; Hu, Y.; Zhang, X. A Near-Infrared Photoactuator Based on Shape Memory Semicrystalline Polymers toward Light-Fueled Crane, Grasper, and Walker. Adv. Opt. Mater. 2019, 7, 1900784. [Google Scholar] [CrossRef]
- Li, L.; Zhao, S.; Luo, X.-J.; Zhang, H.-B.; Yu, Z.-Z. Smart MXene-Based Janus films with multi-responsive actuation capability and high electromagnetic interference shielding performances. Carbon 2021, 175, 594–602. [Google Scholar] [CrossRef]
- Lu, H.; Zhang, M.; Yang, Y.; Huang, Q.; Fukuda, T.; Wang, Z.; Shen, Y. A bioinspired multilegged soft millirobot that functions in both dry and wet conditions. Nat. Commun. 2018, 9, 3944. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, H.; Dong, L.; Shi, Q.; Li, J.; Sun, T.; Huang, Q.; Fukuda, T. Ionic shape-morphing microrobotic end-effectors for environmentally adaptive targeting, releasing, and sampling. Nat. Commun. 2021, 12, 411. [Google Scholar] [CrossRef]
- Li, H.; Darmawan, B.A.; Go, G.; Kim, S.-J.; Nan, M.; Kang, B.; Kim, H.; Lee, S.B.; Bang, D.; Park, J.-O.; et al. Single-Layer 4D Printing System Using Focused Light: A Tool for Untethered Microrobot Applications. Chem. Mater. 2021, 33, 7703–7712. [Google Scholar] [CrossRef]
- Fusco, S.; Sakar, M.S.; Kennedy, S.; Peters, C.; Bottani, R.; Starsich, F.; Mao, A.; Sotiriou, G.A.; Pané, S.; Pratsinis, S.E.; et al. An Integrated Microrobotic Platform for On-Demand, Targeted Therapeutic Interventions. Adv. Mater. 2013, 26, 952–957. [Google Scholar] [CrossRef]
- Tang, J.; Yin, Q.; Shi, M.; Yang, M.; Yang, H.; Sun, B.; Guo, B.; Wang, T. Programmable shape transformation of 3D printed magnetic hydrogel composite for hyperthermia cancer therapy. Extrem. Mech. Lett. 2021, 46, 101305. [Google Scholar] [CrossRef]
- Kuo, J.-C.; Huang, H.-W.; Tung, S.-W.; Yang, Y.-J. A hydrogel-based intravascular microgripper manipulated using magnetic fields. Sens. Actuators A 2014, 211, 121–130. [Google Scholar] [CrossRef]
- Chen, Z.; Lu, W.; Li, Y.; Liu, P.; Yang, Y.; Jiang, L. Solid–Liquid State Transformable Magnetorheological Millirobot. ACS Appl. Mater. Interfaces 2022, 14, 30007–30020. [Google Scholar] [CrossRef]
- Go, G.; Yoo, A.; Nguyen, K.T.; Nan, M.; Darmawan, B.A.; Zheng, S.; Kang, B.; Kim, C.-S.; Bang, D.; Lee, S.; et al. Multifunctional microrobot with real-time visualization and magnetic resonance imaging for chemoembolization therapy of liver cancer. Sci. Adv. 2022, 8, eabq8545. [Google Scholar] [CrossRef]
- Darmawan, B.A.; Lee, S.B.; Nguyen, V.D.; Go, G.; Nguyen, K.T.; Lee, H.-S.; Nan, M.; Hong, A.; Kim, C.-S.; Li, H.; et al. Self-folded microrobot for active drug delivery and rapid ultrasound-triggered drug release. Sens. Actuators B 2020, 324, 128752. [Google Scholar] [CrossRef]
- Lee, Y.W.; Chun, S.; Son, D.; Hu, X.; Schneider, M.; Sitti, M. A Tissue Adhesion-Controllable and Biocompatible Small-Scale Hydrogel Adhesive Robot. Adv. Mater. 2022, 34, 2109325. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Ge, Z.; Wang, X.; Jiao, N.; Tung, S.; Liu, L. Multifunctional thermo-magnetically actuated hybrid soft millirobot based on 4D printing. Compos. Part B 2022, 228, 109451. [Google Scholar] [CrossRef]
- Lee, H.; Kim, D.-I.; Kwon, S.-H.; Park, S. Magnetically Actuated Drug Delivery Helical Microrobot with Magnetic Nanoparticle Retrieval Ability. ACS Appl. Mater. Interfaces 2021, 13, 19633–19647. [Google Scholar] [CrossRef] [PubMed]
- Go, G.; Han, J.; Zhen, J.; Zheng, S.; Yoo, A.; Jeon, M.J.; Park, J.O.; Park, S. A Magnetically Actuated Microscaffold Containing Mesenchymal Stem Cells for Articular Cartilage Repair. Adv. Healthc. Mater. 2017, 6, 1601378. [Google Scholar] [CrossRef]
- Schwarz, L.; Karnaushenko, D.D.; Hebenstreit, F.; Naumann, R.; Schmidt, O.G.; Medina-Sánchez, M. A Rotating Spiral Micromotor for Noninvasive Zygote Transfer. Adv. Sci. 2020, 7, 2000843. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Cai, S.; Yang, W.; Leng, H.; Ge, Z.; Liu, T. Microrobots Based on Smart Materials with Their Manufacturing Methods and Applications. Inventions 2024, 9, 67. https://doi.org/10.3390/inventions9030067
Sun J, Cai S, Yang W, Leng H, Ge Z, Liu T. Microrobots Based on Smart Materials with Their Manufacturing Methods and Applications. Inventions. 2024; 9(3):67. https://doi.org/10.3390/inventions9030067
Chicago/Turabian StyleSun, Jiawei, Shuxiang Cai, Wenguang Yang, Huiwen Leng, Zhixing Ge, and Tangying Liu. 2024. "Microrobots Based on Smart Materials with Their Manufacturing Methods and Applications" Inventions 9, no. 3: 67. https://doi.org/10.3390/inventions9030067
APA StyleSun, J., Cai, S., Yang, W., Leng, H., Ge, Z., & Liu, T. (2024). Microrobots Based on Smart Materials with Their Manufacturing Methods and Applications. Inventions, 9(3), 67. https://doi.org/10.3390/inventions9030067