1. Introduction
The correct estimation of the patient-specific joint axis of the knee is crucial for achieving reliable assessment of musculoskeletal kinematics and dynamics [
1]. For instance, computer-assisted surgery (CAS) allows us to virtually define patient-specific anatomy, which is mandatory to both correctly implant grafts and assess knee joint kinematics [
2,
3].
Nevertheless, despite its importance in studies of the human knee joint model, the so-called “knee functional axis” (KFA) has been largely confined to investigation of passive movement with passive stimulation [
4]. It is treated simply as a subset of flexion–extension movements. Methods of estimating the KFA so far have been mainly passive, with the foot either being in a neutral position or resting on a table [
2]. The limitations of these studies are related mainly to the manual management of flexion–extension movements, which are performed passively without control of voluntary muscle contraction.
In terms of the types and subtypes of anatomical receptors involved, passive touch evidently involves three anatomically different receptive systems: one in the joints, two in the skin, and three in its underlying tissue, although the pattern may be elaborate. However, active movement involves the concomitant excitation of receptors in the joints and tendons along with new changing patterns in the skin, referring to what is ordinarily called “active touch”. When a person touches surfaces with his foot, he produces stimulation. More precisely, variations of stimulation in the plantar surface of the foot are caused by variations in his motor activity [
5]. Individual differences are very important, but have not been emphasized in biomechanics, particularly in locating the KFA. In terms of the relation of touch to kinesthesis, psychologists seem to have assumed that active touch is simply a blend of two modes of sensations: kinesthesis and touch. It is not often realized, even by anatomists, that the function of a joint is not merely to permit mobility of articulated bones, but also to register the relative position and movement of the bones [
6]. The organs of the knee are parts of a perceptual system.
Contact of the foot with a surface during extension of an extremity is specified by a mechanical impression on the skin (i.e., by “touch”). The observer’s movements usually produce impressions on the skin along with stimulation of the muscles, joints, and inner ear. Accordingly, information specific to the self is picked up, regardless of which sensory nerve is delivering impulses, and all kinds of information are picked up concurrently. When an individual touches his foot to ground, he feels both his leg and his skin at the same time. Recently, there have been attempts to characterize “the stationary configuration of the knee” for the knee joint by measuring the instantaneous axes of the knee (IAK), yielding information about joint position and ground reaction forces (GRF), and hence about the active touch of the foot [
7]. The use of this reciprocal system introduces a new dimension of foot loading to knee axis alignment, that is, the relation of touch to kinesthesis. This insight shows that locating knee functional axes is equivalent to static alignment measurement.
The IAK [
7,
8,
9,
10] is proposed to play an integral role in understanding equilibrium function in postural maintenance, which occurs in response to gravity and ground reactions, and in postural stabilization, which occurs in response to a perturbation [
11].
This paper describes a biomechanical method relating foot touch to knee joint movement in order to determine the IAK, which is compulsory to determining the patient-specific joint axis of the knee. The hypothesis considered is that the IAK is the result of perceptual action, as it adjusts perceptual information obtained from the environment in contrast with the merely passively imposed knee axis.
2. Methods
2.1. Types and Subtypes of Knee Receptors Involved in Active Movement
Active movement involves concomitant operation of anatomical components, in which foot touch on the ground and joint rotation are combined together with voluntary muscle contractions. The total flux of stimulation involved in so-called active movement is enormously complex, but lawful modes of combination do occur. Presumably, the modes of combination of these inputs specify the difference between touching (active) and being touched (passive).
An extracellular matrix (ECM) provides a dynamic three-dimensional structure that transfers mechanical stimuli to cells. For the flow of stimulation on a microscale modality (i.e., “mechanotransduction” [
12]), the inverse dynamics problem developed, for structural dynamics translates measurements of local state variables (at the cell level) into an unknown or desired forcing function (at the tissue or ECM level). A representative comparison from cells to tissues (inverse modeling) and from tissues to cells (boundary value modeling) illustrates the multiscale applicability of the inverse model [
13]. Resulting external mechanical conditions can be judged as “unique” by comparison with known in vivo human joint and tissue loads, as shown here from normal (i.e., healthy) function [
14].
In a sense, we chose to take a classical approach towards establishing a model of duality for meaningfully combining the knee axis and foot touch. To relate touch to kinesthesis, a joint in a multibody system is modeled by its joint axis as a screw $, a geometrical element in its own right (
Figure 1). The screw is a “line with an associated pitch” [
15]. It should be noted that both Jessop [
16] and Ball [
17] recognize the relation of touch to kinesthesis and the duality between the static and the kinematic. The screw, therefore, has been poised for more than 100 years to unify the sciences of kinematics and statics.
In human movement, it is always meaningful to classify quantities in terms of power. Power is used to decompose kinesthesis and touch into meaningful information on a subspace. For example, reaction forces are wrenches $’ that provide zero power (
Figure 1) and whose application axes pass through the instantaneous axes of the knee (IAK), $. The joint space is the subspace of relative motion between the two bodies connected by the joint [
19], the subspaces being defined according to their power relation. The joint axis $ also defines the reaction subspace
R, composed of all $’, as its null-space through the equation (
T is transpose).
This gives one meaningful subspace $ for the IAK and one $’ for the reaction forces, whose relation is termed as “reciprocal” [
18].
The knee perceptual system includes muscles, anterior cruciate ligaments (ACL), posterior cruciate ligament (PCL), medial collateral ligament (MCL), and articular contact in the medial (P
1) and lateral (P
2) compartments (
Figure 1). We have shown that six constraints are members of the “joint reaction subspace” (JRS) and are situated such that forces acting along them equilibrate when applied to a knee joint. A certain determinant then vanishes, and the six lines (which we call the “knee complex”) are in involution, and are collectively reciprocal to the IAK [
8,
10,
20]. Each of the six lines is a linear combination of the other five lines. This theorem was proposed by Möbius [
17], who showed that forces about the six lines can equilibrate and that if five of the lines are given along with a point on the sixth line, then the sixth line is limited to a polar plane. Ball classified the knee complex in involution as a five-system which proceeds via its reciprocal one-system [
17].
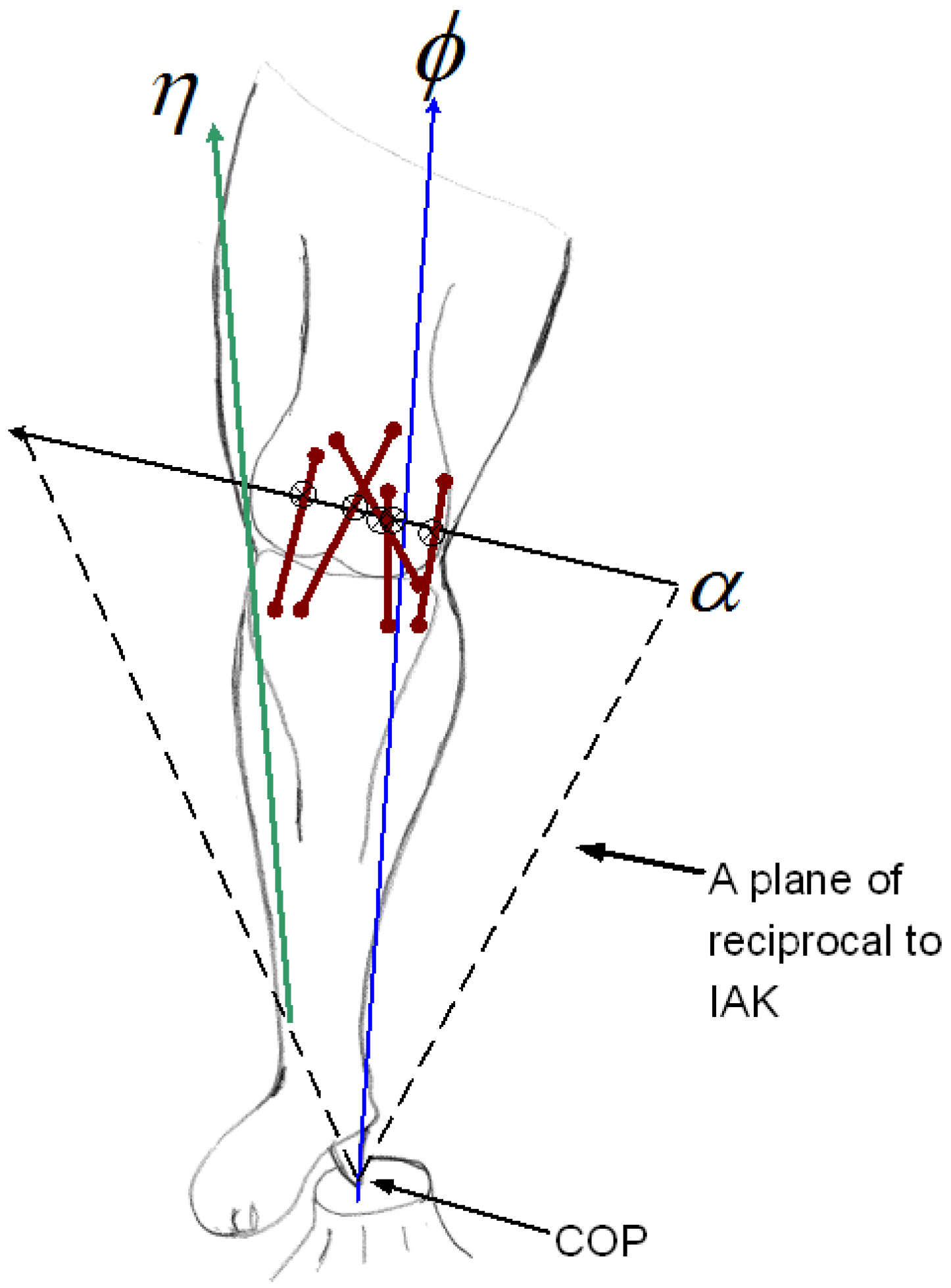
We found that if the IAK is given and the location of the center of pressure (COP) on the axis of the ground reaction force (GRF) is known, then the GRF vector is limited to a plane in the screw system of the first order [
21] (
Figure 2). This aligns the knee joint with the GRF such that reaction torques are eliminated. The reaction to the GRF is then carried by the musculoskeletal structure of the leg instead of the knee, thus representing the stationary configuration of the knee [
7].
When the IAK is connected reciprocally to the GRF during the stance phase of movement, the knee joint can be considered to be in a reciprocal configuration state. A considerable GRF can be exerted during the stance phase of the leg within the gait cycle when the axis of the GRF nearly coincides with a reciprocal screw. This stationary configuration within the stance phase is important because the knee can then exert a wrench of substantial intensity on the corresponding GRF vector (
Figure 2) without engendering an overload of the JRS [
7].
2.2. Specifying Limb Movements: Invariant Structure of the Knee
Active touch is composed of certain special combinations of inputs in the joint-and-tendon receptors, and probably carries information about the object being touched. A body organ is adjusted for the registration information [
5,
22]. The limbs and extremities are, of course, motor organs as well as sensing organs, but the function of motor performance can be subordinated to the function of exploratory adjustment in the case of the limbs. The single term “kinesthesis” cannot sustain the burden of all meanings that have been added to its original meaning. In this work, we try to emphasize the multiplicity of so-called kinesthesis by utilizing different combinations of theses inputs and different functions of these combinations.
Since the shank
S and thigh
T are appropriated by two different elements of the mass linkage (
Figure 3), no kinematic significance can be attached to the composition of the two twists on
S and
T. It should be noted that nothing has been asserted about the performatory movement of the knee, as when an object is relocated or when a tool is wielded. Hence, we consider only a small, perceptive movement: a twist on a screw. If, however, the two twists on
S and
T with the proper ratio of amplitudes are applied to a single rigid body, the displacement produced could have been affected by a single twist about a single screw, the IAK, on the cylindroids (
S,
T). We have shown that the IAK is then defined by a linear combination of the two screws belonging to the cylindroids.
Presumably, the modes of combination of these two inputs (
S,
T) specify the differences between touching and being touched. An individual reaction force that produces no power in the JRS has an application axis that passes through the instantaneous axes of the knee (IAK) $. Equivalently, the resulting reaction forces in the ligaments lie on the application axis of $’ (
Figure 1). In
Figure 1, it is stated that the line of force $ residing between two inputs (
S,
T) must be incapable of causing a change in the relative displacement $ that exists between these two bodies. In other words, if the line of force $’ is not reciprocal to $, the desired input/output (I/O) relationship cannot be achieved.
The invariant structure of the IAK that specifies the ground–foot contact underlies the changing patterns between two inputs (S, T). The pattern of two inputs (S, T) is superposed on the nonchanging features of the cylindroids defined by (S, T). One of these nonchanging features is a twist about one definite screw, IAK, achieving the desired relationship between touch and kinesthesis.
3. Results
To validate our modeling approach for the IAK during the stance phase of a gait, we used previously published experimental data sets and compared their measured medial and lateral contact forces with our predicted datasets. Data from Fregly et al. [
23] included motion capture, fluoroscopy data, GRFs, electromyographical data, medial and lateral knee contact forces, and strength data. Data were collected from an instrumented right knee replacement in an adult male subject (65 kg in weight and 1.7 m in height). When the variations in the touch pattern—in terms of intensities as well as directions—are shown along with the variations of the movement pattern in terms of IAK, it is difficult to notice the fluctuation of intensities of cutaneous sensation; instead, the observer is primarily aware of the substance and the resistance of its surface (
Figure 4). The IAK was determined by a linear combination of two instantaneous screw axes of the shank and thigh. Moreover, by virtue of positioning the IAK of the knee in the global frame, those IAKs could be somewhat connected with the GRF existing on the screws during the gait trial. The challenges of relating the reciprocal connection [
18,
20] (magnified in the inset in
Figure 4) between impulsive touches, GRF, and covariant postures for IAK emphasize that the perceptual system registers the covariance of cutaneous and articular motion information. The touch pattern and the vector pattern are altered together by the mechanical necessities of terrestrial environment.
For every terrestrial animal, upward pressure from the support surface on the ventral side of the foot provides a constant background of stimulation. It is covariant with the continuous input of the appropriate receptors of articular motion in the knee joint already mentioned. Together, they provide what is ordinarily called a “sense of support”. The axis of gravity and the plane of the ground provide the basic frame of reference for tactual space perception. As described below, active touch yields clear perceptions of environmental space in the absence of vision.
Therefore, a one-to-one correspondence exists between impulsive reaction forces and the instantaneous screw axis. Expressing this differently, the complexes of instantaneous and impulsive screws are projective, powerless forces passing through the IAK and merging into the knee complex in involution (KCI). We also perceive that a given wrench, GRF, can always be replaced by a wrench of appropriate intensity on any other screw, insofar as effects on a knee that is free only to twist about the IAK are concerned. IAK screws are shown to nearly coincide with a reciprocal screw of the GRF as indicated in magnified inset image in
Figure 4.
Therefore, the figure presents a measure of KCI for a particular observer; accordingly, measurement has been conducted relative to the observer (i.e., relative to the posture and behavior of the observer being considered). The touch pattern and vector pattern are altered together owing to the mechanical necessities of the terrestrial movement. The covariance of cutaneous and articular motion is information in its own right.
4. Discussion
A series of observations, both introspective and behavioral, confirms the distinction between touching and being touched. The former is a channel for a great variety of information about the environment, but whether it should be considered one or several senses is a matter of definition. The simple formula that holds that it consists of passive touch plus kinesthesis is insufficient. The hypothesis of two components of stimulation, one exterospecific and one propriospecific, is more promising—the covariance of cutaneous and articular motion being considered information in its own right.
In general, biomechanical experiments have not realized that applying stimulation to an observer is not the same as an observer obtaining a stimulus. Obtainable stimuli can be controlled and varied systematically, just as applied stimuli can be. Psychophysical experiments are possible for tactual perception as well as for cutaneous sensitivity, provided that appropriate methods are devised for controlling the obtainable stimuli and that the change in stimulation patterns caused by changing interventions can be predicted as a single visualization, such as in
Figure 4. Thus, altering walking mechanics and muscle coordination patterns through interventions directly influences the invariant structure of the knee condition, resulting in changing joint forces. To realize beneficial effects, a new paradigm for braces and orthoses intended to reduce loads must be established. Is the aspect of unloading essential, or are stability and proprioception the most important factors? The latter question can be answered by exploring an optimally tuned knee that satisfies the condition of invariant structure.
Hence, stimuli that have one excitatory capacity for a receptive subsystem in passive touch have a different excitatory capacity in active touch—a different specificity. The relations between a subsystem’s stimulation are significant. An allowed combination of inputs carries information different from that carried by isolated inputs and yields a different perception. To lump one set of receptive systems together as touch and another as kinesthesis, then, obscures the function of the systems in combination. Anatomically different receptors may serve the same functions and arouse the same experiences and, moreover, may serve different functions in different combinations. It might be better to abandon the term “individual anatomical unit” and speak instead of the “invariant structure of the knee”.
Acknowledgment that the normal knee axis is truly an
obtained stimulus and not an
imposed one, as we have long assumed, has come slowly. A remarkable aspect of the new concept of active IAK proprioception, in contrast with the old concept of passive IAK, is that we can no longer consider the stimulation of the knee axis separately from the adjustment of accommodation, modulation, or stabilization that determines the IAK. The movements of IAK tend towards an equilibrium of clarity and not of need reduction [
24]; equilibrium is a process of continuous compensation, where the input is optimized rather than the output [
22]. It follows as well that a “tuning” of nervous centers filters out irrelevances [
24].
Information about the self (IAK) accompanies information about the environment (GRF), and the two are inseparable. Egoreception accompanies exteroception like the other side of the same coin. Therefore, it has been stated that we should choose surgical procedures that not only reconstruct anatomy, but also restore the function of the original invariant structure of the knee, specified in terms of the IAK, where the line of force in any reconstructed graft must be incapable of causing a change in the IAK. In other words, the term “invariant structure of the knee” invokes necessary and sufficient conditions to avoid impingement.
5. Conclusions
Observing the performance of locomotion, we proposed an unrecognized mode of experience called the “invariant structure of the knee”, which goes beyond the classical modalities of touch and kinesthesis. This approach demonstrated that the alignment of the IAK associated with the GRF reduces the payload on medial/lateral compartments, thus transmitting a reaction (braking) torque to the structure of the limb; this is termed as a performance model of the invariant structure of the knee. This principle attempted to distill a kind of higher-order simplification relative to the enormous complexities of analytical anatomical objects and the practice of biomechanical engineering, which are sometimes confused.
Acknowledgments
We would like to thank B. J. Fregly of the University of Florida for making his data available to us. The first author extends thanks to his wife Miwon Kim for her assistance, his daughter April S. Kim of Temple University School of Pharmacy and his son Dennis D. Kim of Texas public safety department for proof editing.
Author Contributions
Wangdo Kim made substantial contributions to conception and design, and/or acquisition of data, and/or analysis and interpretation of data; Young Choi participated in drafting the article or revising it critically for important intellectual content; and Hong-Gi Lee gave final approval of the version to be submitted and any revised version.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Colle, F.; Lopomo, N.; Visani, A.; Zaffagnini, S.; Marcacci, M. Comparison of three formal methods used to estimate the functional axis of rotation: An extensive in vivo analysis performed on the knee joint. Comput. Methods Biomech. Biomed. Eng. 2016, 19, 484–492. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Tsai, T.Y.; Li, J.S.; Rubash, H.E.; Li, G.; Freiberg, A. In vivo analysis of flexion axes of the knee: Femoral condylar motion during dynamic knee flexion. Clin. Biomech. 2016, 32, 102–107. [Google Scholar] [CrossRef] [PubMed]
- Tsai, T.Y.; Dimitriou, D.; Liow, M.H.; Rubash, H.E.; Li, G.; Kwon, Y.M. Three-dimensional imaging analysis of unicompartmental knee arthroplasty evaluated in standing position: Component alignment and in vivo articular contact. J. Arthroplast. 2016, 31, 1096–1101. [Google Scholar] [CrossRef] [PubMed]
- Tsai, T.Y.; Li, J.S.; Wang, S.; Li, P.; Kwon, Y.M.; Li, G. Principal component analysis in construction of 3D human knee joint models using a statistical shape model method. Comput. Methods Biomech. Biomed. Eng. 2015, 18, 721–729. [Google Scholar] [CrossRef] [PubMed]
- Gibson, J.J. Observations on active touch. Psychol. Rev. 1962, 69, 477–491. [Google Scholar] [CrossRef] [PubMed]
- Lloyd, A.J.; Caldwell, L.S. Accuracy of active and passive positioning of the leg on the basis of kinesthetic cues. J. Comp. Physiol. Psychol. 1965, 60, 102–106. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Veloso, A.P.; Vleck, V.E.; Andrade, C.; Kohles, S.S. The stationary configuration of the knee. J. Am. Podiatr. Med. Assoc. 2013, 103, 126–135. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Veloso, A.P.; Araújo, D.; Vleck, V.; João, F. An informational framework to predict reaction of constraints using a reciprocally connected knee model. Comput. Methods Biomech. Biomed. Eng. 2015, 18, 78–89. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Kim, Y.-H.; Veloso, A.P.; Kohles, S.S. Tracking knee joint functional axes through tikhonov filtering and Plűcker coordinates. J. Nov. Physiother. 2013. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Espanha, M.; Veloso, A.; Araújo, D.; João, F. An informational algorithm as the basis for perception–action control of the instantaneous axes of the knee. J. Nov. Physiother. 2013, 3, 127. [Google Scholar] [CrossRef] [PubMed]
- Bouisset, S.; Do, M.C. Posture, dynamic stability, and voluntary movement. Neurophysiol. Clin. 2008, 38, 345–362. [Google Scholar] [CrossRef] [PubMed]
- Mouw, J.K.; Imler, S.M.; Levenston, M.E. Ion-channel regulation of chondrocyte matrix synthesis in 3D culture under static and dynamic compression. Biomech. Model. Mechanobiol. 2007, 6, 33–41. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Tretheway, D.C.; Kohles, S.S. An inverse method for predicting tissue-level mechanics from cellular mechanical input. J. Biomech. 2009, 42, 395–399. [Google Scholar] [CrossRef] [PubMed]
- Kohles, S.S.; Gregorczyk, K.N.; Phillips, T.C.; Brody, L.T.; Orwin, I.F.; Vanderby, R., Jr. Concentric and eccentric shoulder rehabilitation biomechanics. Proc. Inst. Mech. Eng. H 2007, 221, 237–249. [Google Scholar] [CrossRef] [PubMed]
- Griffis, M.; Rico, J.M. The nut in screw theory. J. Robot. Syst. 2003, 20, 437–476. [Google Scholar] [CrossRef]
- Jessop, C.M. Treatise on the Line Complex; American Mathematical Society: Providence, RI, USA, 1903. [Google Scholar]
- Ball, R. A Treatise on the Theory of Screws; Cambridge University Press: Cambridge, UK, 1900. [Google Scholar]
- Kim, W.; Kohles, S.S. A reciprocal connection factor for assessing knee-joint function. Comput. Methods Biomech. Biomed. Eng. 2011, 15, 911–917. [Google Scholar] [CrossRef] [PubMed]
- Alexiou, J. Projective Articulated Dynamics. Master’s Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 1999. [Google Scholar]
- Kim, W.; Veloso, A.; Tan, J.; Andrade, C. A reciprocal connection at knee joint. In Proceedings of the ASME 2010 Summer Bioengineering Conference, Naples, FL, USA, 16–19 June 2010.
- Möbius, A. Ueber die zusammensetzung unendlich kleiner drehungen. J. Reine Angew. Math. 1838, 18, 189–212. [Google Scholar] [CrossRef]
- Gibson, J.J. The Senses Considered as Perceptual Systems; Houghton: Boston, MA, USA, 1966. [Google Scholar]
- Ashton-Miller, J.A.; Wojtys, E.M.; Huston, L.J.; Fry-Welch, D. Can proprioception really be improved by exercises? Knee Surg. Sports Traumatol. Arthrosc. 2001, 9, 128–136. [Google Scholar] [CrossRef] [PubMed]
- Gibson, J.J.; Reed, E.S.; Jones, R. Reasons for Realism: Selected Essays of James J. Gibson; Lawrence Erlbaum: Mahwah, NJ, USA, 1982. [Google Scholar]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).




{kind=link}
{kind=link}
{kind=link}
{kind=link}



