
Electrical Muscle Stimulation for Kinesthetic Feedback in AR/VR: A Systematic Literature Review


Abstract
:1. Introduction
2. Background
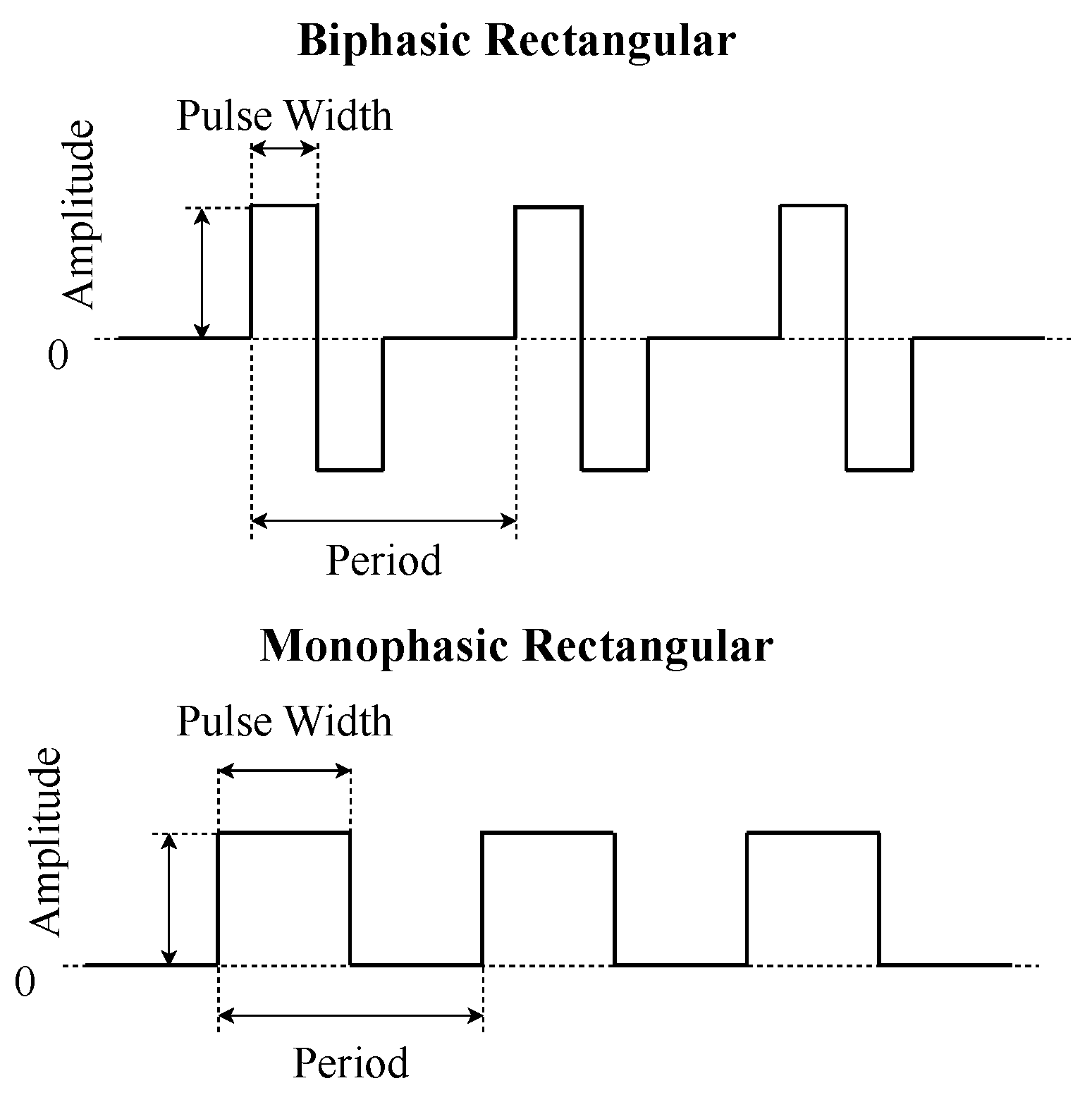
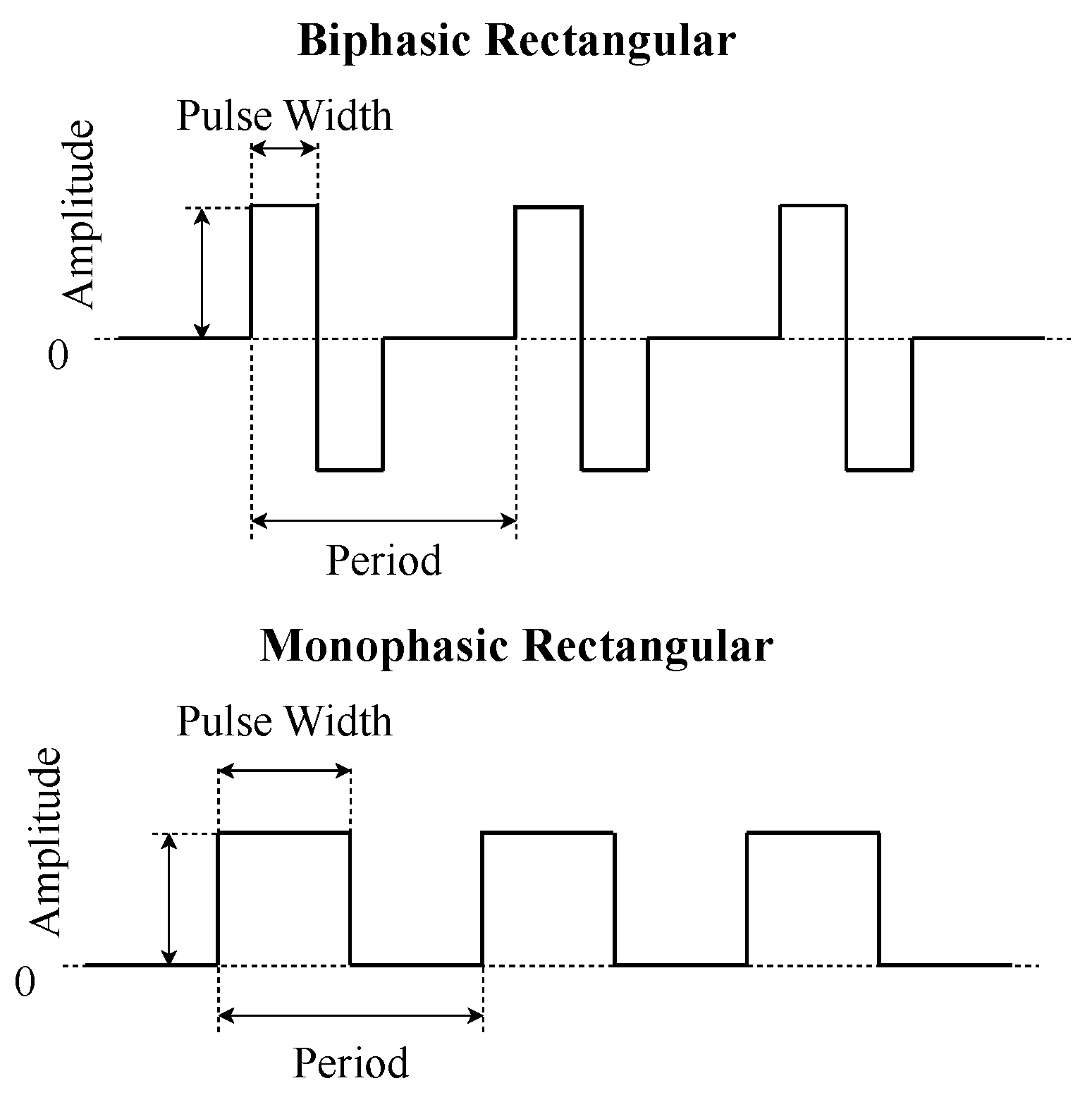
- Pulse Form: Refers to the shape of the electrical pulse, which can be biphasic, monophasic, sinusoidal, or other forms.
- Pulse Intensity: The level of electrical current’s amplitude during stimulation. Higher pulse intensity leads to more muscle recruitment.
- Pulse Width: The length of time each electrical pulse lasts. Longer pulse width leads to more muscle recruitment.
- Pulse Frequency: The rate at which electrical pulses are delivered, measured in pulses per second (Hertz). It is well-known that higher pulse frequency leads to faster muscle fatigue [24].
3. Review Aims and Scope
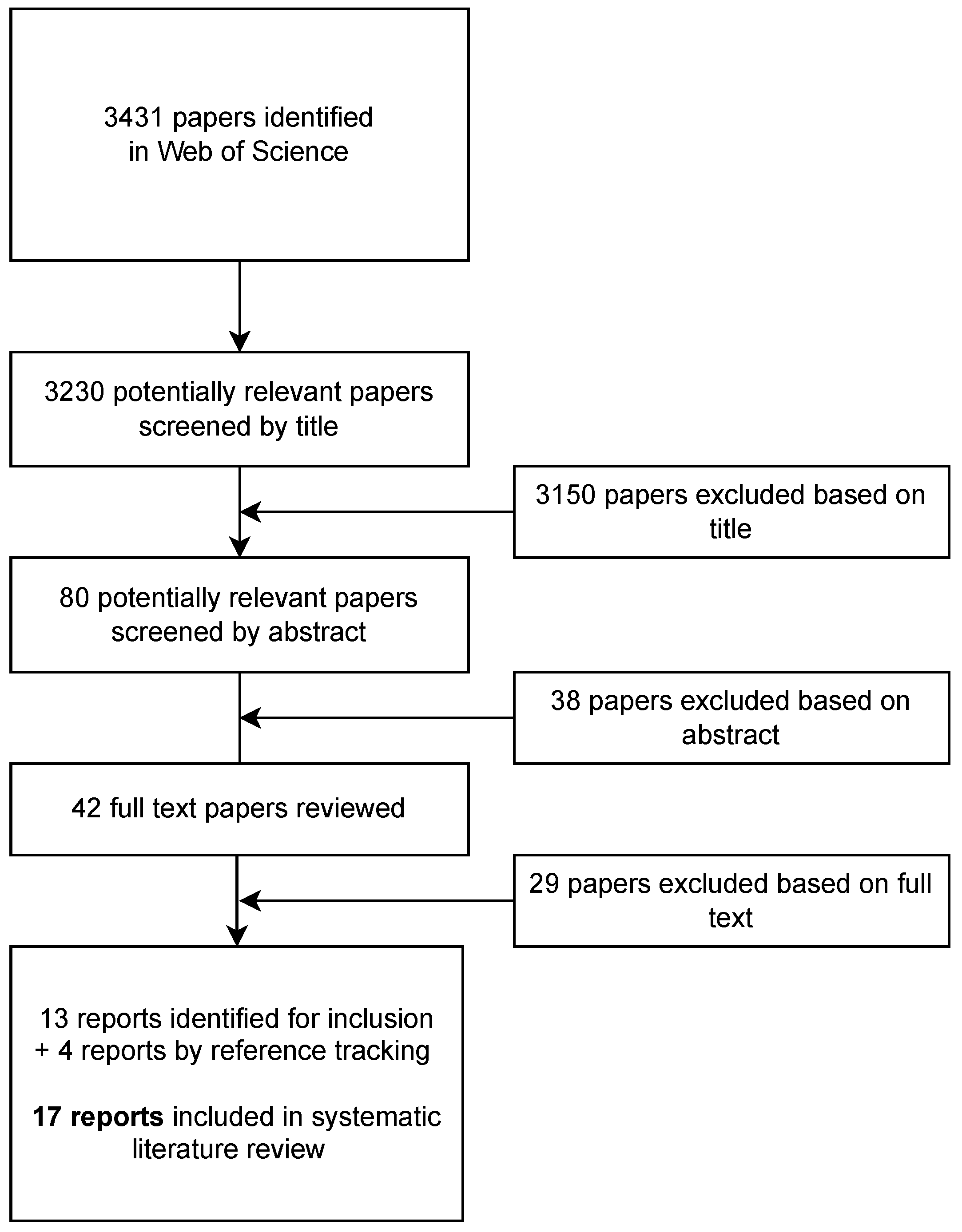
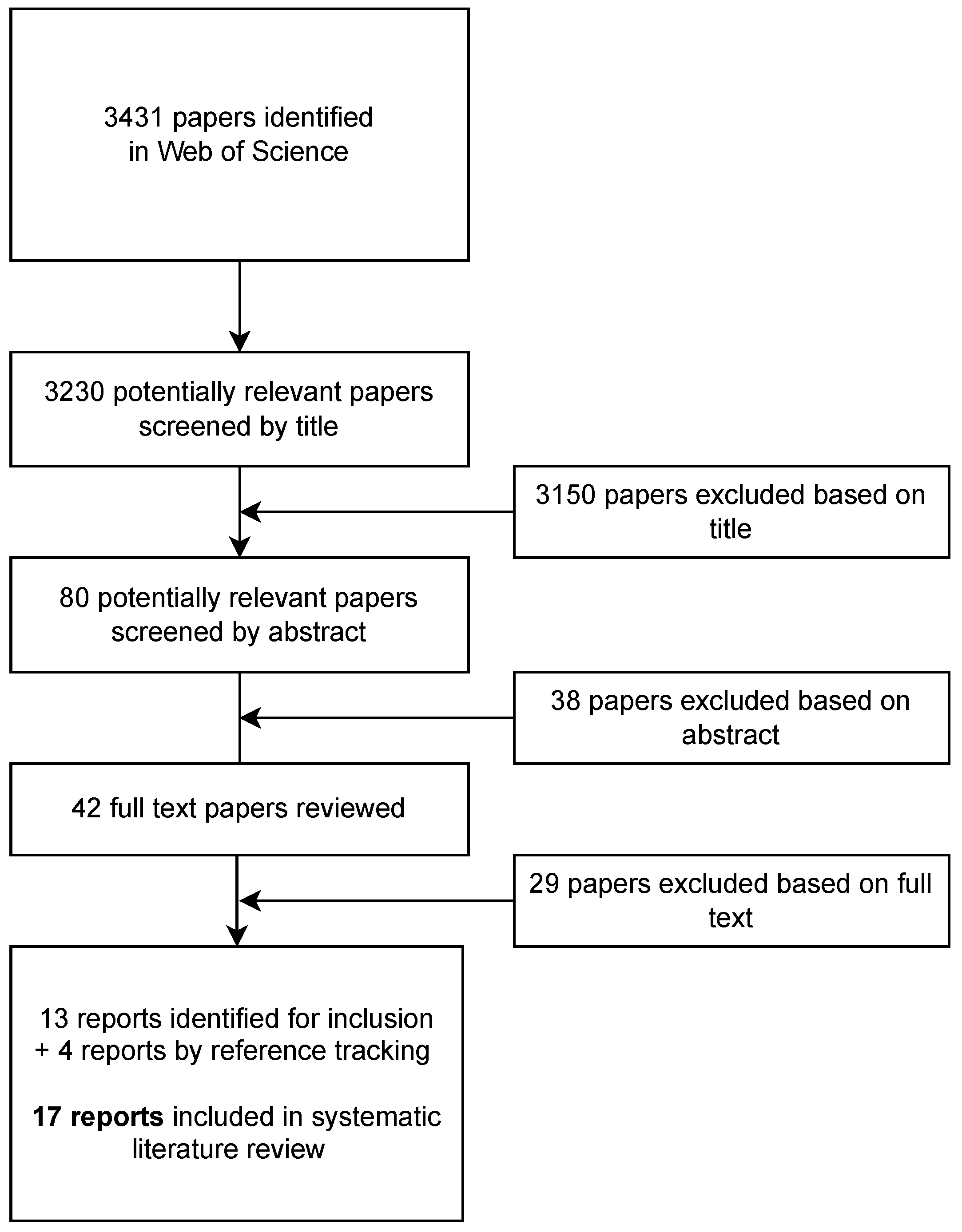
4. Review Method
- Studies focusing solely on non-invasive electromuscular stimulation (EMS) applications, to distinctly analyze the effects and implications separate from invasive or semi-invasive methods, which carry different risks and ethical concerns.
- Exclusion of studies combining electrical stimulation with other methods like mechanical or vibrotactile stimulation, to isolate the unique effects of EMS on haptic feedback.
- Restriction to studies published in English, to ensure consistency and manageability in our review process.
5. Review Findings
5.1. Kinesthetic Feedback Applications
5.2. Stimulation Parameters
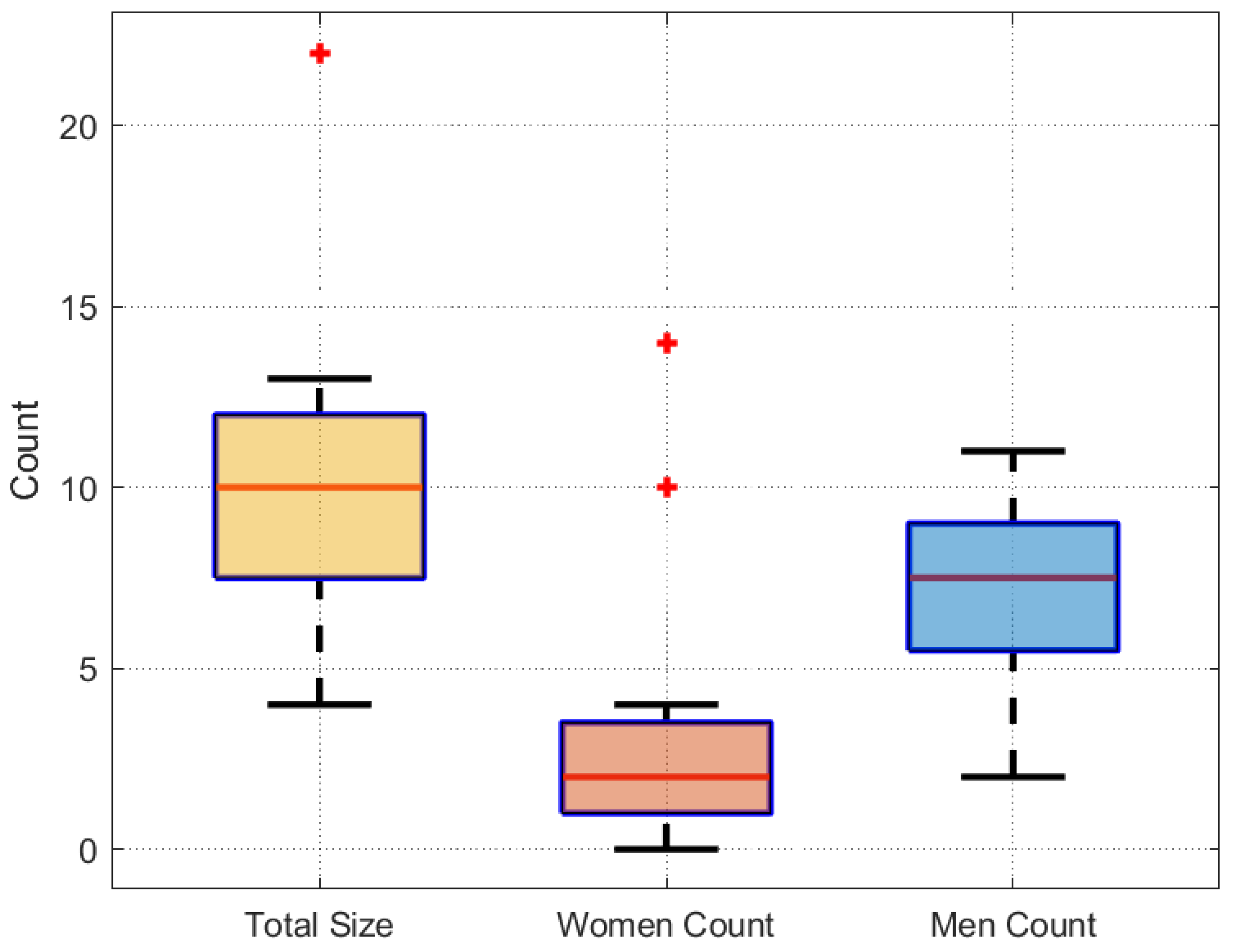
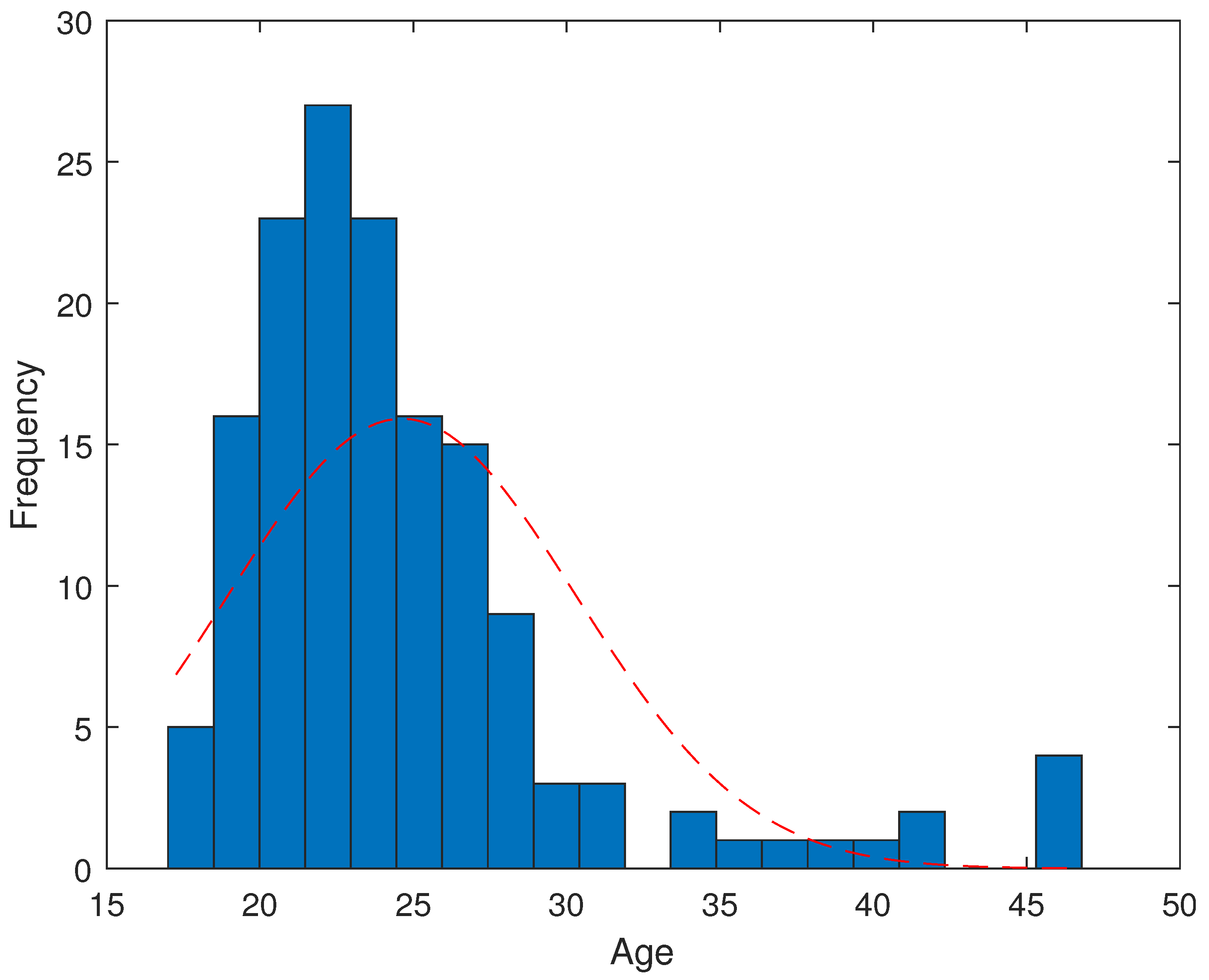
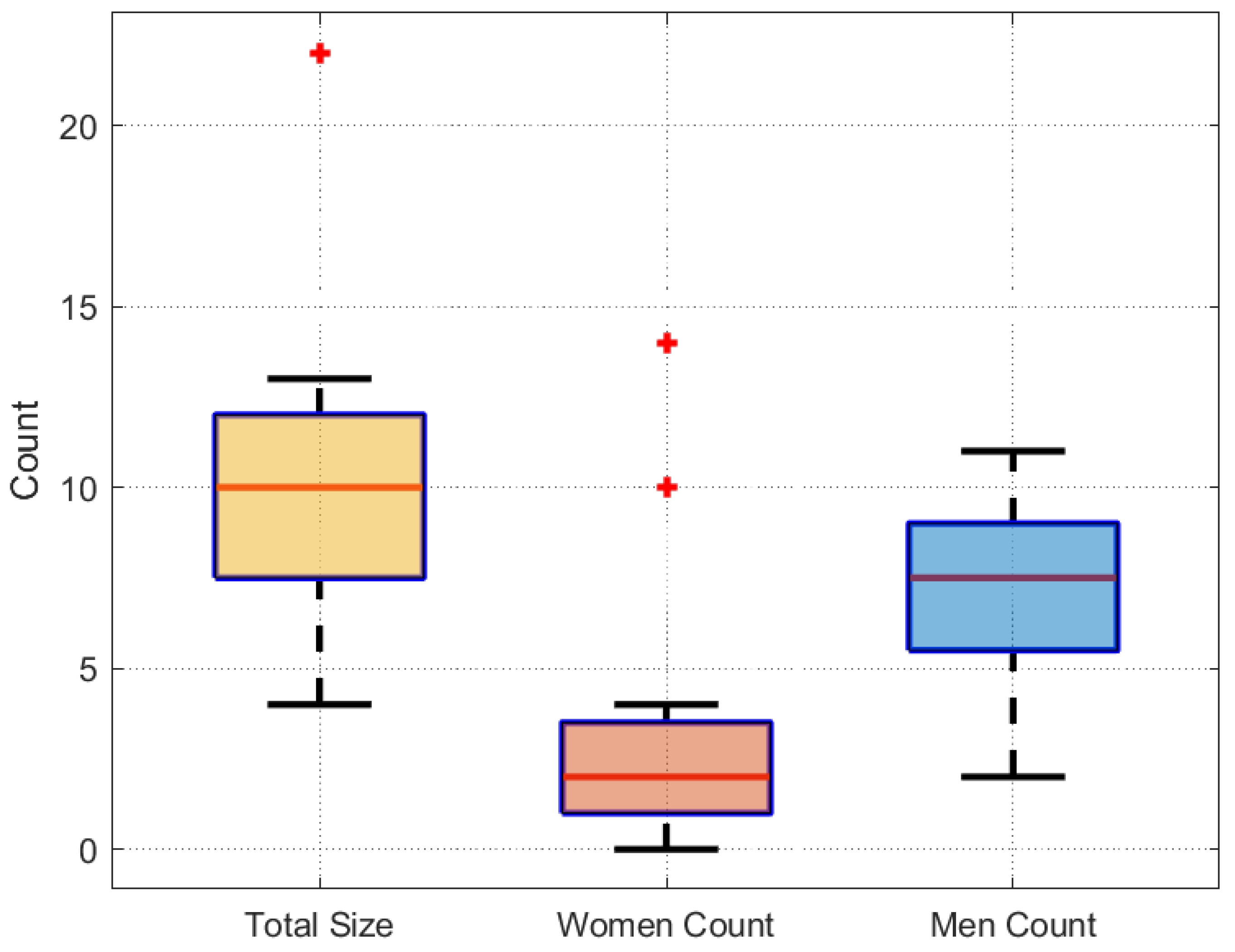
5.3. Samples and Measures
6. Discussion
6.1. Summary of Findings
6.2. Limitations
6.3. Recommendations for Future Research
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Research Question/Problem | Body Part | Experimental Setup | Stimulation Parameters * | Study | Results |
|---|---|---|---|---|---|---|
| Kruijff et al. [18] | Pioneering research in using EMS for force-related haptic feedback | Biceps or brachioradialis muscle | 3D environment Quake3; Laptop; Stimulator Schwa-medico SM; | Form: rect. biph. I: 10–25 mA V: - PW: - F: 3–5 Hz EL: - | Sample: n = 7 (1 female); Age: - Scope: examined EMS intensity for muscle contraction and how to replicate the feeling of being hit by an object Measures: 5-level Likert about overall experience | Higher fat level and bigger arm required a higher stimulation intensity to activate the muscle; “Pain” and “reaction loss” were rated rather positively; the findings about “feedback”, “excitement” and “further usage” were split |
| Farbiz et al. [39] | Developed EMS-based haptic system for tennis in mixed reality | Forearm | Head mounted display, marker tracking, microcontroller, PC with physics simulation | Form: - I: - V: - PW: - F: - EL: 2 | Sample: - Age: - Scope: - Measures: - | - |
| Lopes and Baudisch [27] | Developed a portable EMS system that can hide behind a smartphone device and produce force feedback while playing a game | Flexor carpi radialis, flexor digitorium superficialis | Stimulator consists of Arduino Uno and amplifier; smartphone HTC One X; Four reed relays; digital spring-scale to measure force | Form: biph. I: from visible contraction to pain limit V: - PW: 290 μs F: 25 Hz EL: 4 × pre-gelled | Sample: (1) n = 10 (2 female); (2) n = 10 (3 female); Age: (1) M = 31.2, SD = 9; (2) M = 27.4, SD = 5.4; Scope: (1) Measure the force from EMS-induced palm flexion; (2) compared EMS with vibrotactile feedback Measures: 5-level Likert | Study 1: Highest generated force 18.7 N for a pulse duration of 1000 ms; Study 2: EMS feedback more enjoyable than vibrotactile feedback (Mdn = 4.5/5); EMS feedback reportedly leads to more positive experience (Mdn = 4.5/5) |
| Pfeiffer et al. [40] | Demonstrated the use of EMS for haptic feedback in public spaces | Both lower-arms | Microsoft Kinect, custom EMS-system: Arduino, control unit, battery | Form: - I: - V: - PW: 260 μs F: 50–70 Hz EL: 4 | Sample: - Age: - Scope: - Measures: - | - |
| Lopes et al. [36] | Used EMS on the lower-arm for eyes-free interaction | Extensor digitorum, flexor digitorum superficialis | 3d-printed bracelet, EMS-system: TruTens V3, amplifier X9C103 10 Kohm, Arduino Nano & Bluetooth, EMG: AD8221 differential amplifier, Accelerometer: WAX3/WAX9 | Form: Biphasic I: Up to 100 mA V: - PW: 150 μs F: 120 Hz EL: 4 (50 × 50 mm) | Sample: (1) n = 10 (3 female), (2) n = 12 (3 female) Age: - Scope: verify interaction concept, investigate emotional response Measures: Goniometer for angle measurement | Wrist poses recreated by the participants with an average error of 5.8°; all participants reported the feeling of “fun” when playing a custom game |
| Lopes et al. [37] | EMS-based system that allows objects to communicate their use (motion, sequence of movements, time-varying behaviors) to the user | Flexor digitorum, flexor carpi radialis, extensor digitorum, flexor digitorum profundus, biceps brachii | EMS-System (4-channel): X9C102 digital potentiometer, microcontroller (ATMEGA328); 8-camera Optical tracking system: Optitrack, RFID sensor: SM130 Mifare 10 MHz | Form: - I: Up to 100 mA V: - PW: 150–250 μs F: 80–140 Hz EL: up to 4 | Sample: n = 12 (2 female, 10 male) Age: M = 25, SD = 3.36 Scope: Evaluate the effectiveness of EMS in conveying the affordance of an object Measures: 7-item Likert scales, questionnaires focusing on the identification of the intended affordance | 76% of participants correctly identified the behaviors the object had been intended to communicate and all participants figured out how to use the object |
| Kurita et al. [32] | Calculated a mathematical model that allows rendering the stiffness of objects as torque at the user’s elbow joint as a function of the applied voltage on the biceps muscle | Biceps muscle | HMD as visual display system; and EMS system; PC with Unity engine and LabView; ARtoolKit for optical motion tracking; Stimulator ULI-100, Unique Medical Co., Ltd.; D/A converter NI USB-6215; Phantom premium (Sensable Inc.); Force transducer sensor | Form: Mono. rect. I: - V: 0–100 V PW: 0.4 ms F: 50 Hz EL: 2 rectangular | Sample: n = 4 (all male) Age: 22–24 y.o. Scope: The participants pushed with their arm on a haptic device, until the perceived stiffness matched with the EMS-evoked stiffness Measures: Measured force that was generated by stimulation of biceps muscle using a force transducer sensor | Estimated exerted force and measured exerted force: , ; Target stiffness and perceived stiffness: , ; Maximal stiffness achieved ca. 0.3 N/mm by around 65 V |
| Lopes et al. [30] | Used the system developed in [25] for rendering haptics of heavy objects and “repulsion forces” in VR applications | extensor digitorum, extensor carpis ulnaris, biceps, triceps, infraspinatus, teres major/minor | Stimulator Rehastim, Hasomed, Germany; PC with Unity3D; Optical trackers 8 × Optitrack’s Prime 17W; | Form: - I: 15–20 mA V: - PW: 70–200 μs F: - EL: 8 electrodes | Sample: (1) n = 13 (4 female); (2) n = 6 (1 female); Age: (1) M = 22.4, SD = 2.1; (2) M = 22, SD = 2.09; Scope: (1) Realism, consistency, and user-preference of different wall-penetrating methods; (2) Experience of using EMS feedback versus no feedback; Measures: Likert scale | EMS-rendered soft objects were more believable than hard ones, and repulsion method had the least wall penetration. Most participants preferred EMS over vibrotactile feedback, and it also increased user enjoyment and realism, particularly when combined with electro visuals |
| Harris et al. [31] | Approach that uses EMS-based feedback to evoke the haptic effect of “hitting” a virtual wall | Triceps brachii muscle, Biceps brachii muscle | Torque-Force sensor Futek; 1-DOF elbow platform; Stimulator RehaStim from Hasomed; Potentiometer Midori Green Pot; PC; Quanser Q8-USB and QuaRC; Mathworks Matlab Simulink; Oscilloscope Rigol | Form: biph. rect. I: 0–80 mA V: - PW: First trials 25, 35 and 45 μs second trials 0–300 μs F: - EL: hydrogel adhesive | Sample: n = 2 Age: - Scope: Four scenarios are tested: pre-wall at , no pre-wall or antagonist stimulation, antagonist stimulation (biceps) with pre-wall, antagonist stimulation (biceps) no pre-wall Measures: Potentiometer for angle measurement | The scenarios with the pre-wall performed best, while antagonist stimulation also reduced the oscillations and led to a more realistic result |
| Ebisu et al. [38] | EMS-based system for learning music intstruments | Extensor carpi radialis longus and brevis, brachioradial, gastrcnemius | Arduino, PC, DC power source, electrode pads | Form: - I: - V: 17–29 V PW: 800 μs F: 50–70 Hz EL: OMRON HV-LLPAD | Sample: n = 12 (2 female) Age: M = 20, SD = 2.07 Scope: Evaluate the use of EMS for rhythm learning and helping users play musical instruments Measures: Interviews and position of hand | 50% of participants were able to produce the correct rhythm when using the system |
| Lopes et al. [25] | Developed a mobile EMS system for providing EMS-based force feedback in AR/VR applications | Teres major, Triceps, Biceps, Supinator, Pronator teres, Extensor digitorum, Flexor carpi radialis | EMS system RehaStim2, Windows-based laptop and Microsoft HoloLens | Form: - I: 15–27 mA V: - PW: 100–420 μs F: - EL: 10 electrodes | Sample: n = 12 (2 female) Age: M = 22.7, SD = 4.9 Scope: The hypothesis of the study was that EMS-based feedback by the execution of specific applications would lead to higher realism and enjoyment of the users against no EMS feedback Measures: The realism and enjoyment were reported using a seven-level Likert scale | EMS system led to significantly more realism. Moreover, for two out of three applications, the enjoyment was significantly higher using EMS-haptic feedback. |
| Khamis et al. [28] | Developed an EMS-based system to elicit physical sensations to different body parts while viewing animation cutscenes in VR games | Deltoid muscle, Biceps, Flexor digitorum superficialis, Extensor digitorum | EMS generator toolkit by [42], EMS control module STIM-PRO X9+, PC with i7 6500k processor, HTC Vive headset with controller, Unity VR | Form: - I: - V: 0–50 V PW: 100 μs F: 100 Hz EL: 8 pads 5 × 5 cm; 4 pads 10 × 5 cm | Sample: n = 22 (14 females) Age: M = 24, SD = 3 Scope: Test if the approach leads to more realism and presence of cutscenes in VR animations (conditions: no feedback, vibrotactile feedback, and EMS feedback) Measures: Results rated using IPQ, seven-level Likert questionnaire and interview | EMS-based feedback outperformed no feedback or vibrotactile feedback on the perceived realism, presence, involvement, and sense of being there |
| Pfeiffer et al. [26] | Used EMS in a virtual environment for training employees to remember workflows | Extensor digitorum; Flexor digitorum profundus; | EMS generator toolkit by [42]; EMS control module STIM-PRO X9+; Laptop with Unity3D; HTC Vive controller; HMD SteamVR; | - | Sample: n = 8 (2 female) Age: 18–28 y.o. Scope: Test four conditions: (i) no haptic feedback, (ii) prevent pushing incorrect buttons, (iii) encourage pushing correct buttons, (iv) last two combined; Measures: Duration and success rate for a sequence are recorded; 5-level Likert about EMS comfort | The EMS-based feedback was not perceived as uncomfortable and reportedly most of the participants felt that it supported them |
| Lee et al. [29] | Presented a mathematical force response model for the forearm extensor muscles that can be used for applications in haptics | Forearm extensor muscles (extensor digitorum, extensor carpi radialis longus, extensor carpi ulnaris, extensor digiti minimi) | Computer; EMS system RehaMove3; DAQ board NI USB 6008; amplifier; torque sensor NT-200KC | Form: biph. rect. I: specified during calibration phase according to the motor threshold and pain limit V: - PW: 400 μs F: 20, 30 or 40 Hz EL: 5 × 5 cm, Valutrode, Denmark | Sample: n = 10 (1 female) Age: M = 26.4, SD = 1.96 Scope: Compare experimental and estimated peak force (NRMSE, ) in order to prove the validity of presenting the force as an exponential function; Compare experimental and simulated force response in order to prove the validity of the mathematical model Measures: - | Accuracy of estimated peak force: 0.96, NRMSE Accuracy of force response model: , |
| Ishimaru et al. [35] | Developed a haptic display that emulates hitting bumps with the finger | Near extensor digitorum muscle (exact location is found empirically) | Custom developed stimulator device; PC with touchscreen; Force sensor RS PRO 5000 g | Form: - I: - V: - PW: 0.5 ms F: 60 Hz EL: 2 × single-use 50 × 35 mm | Sample: n = 11 (all male) Age: 21–23 y.o. Scope: (1) Compare the EMS-based approach to other approaches; (2) Compare different EMS-based virtual bumps with real bumps; (3) Examine the wavelength property of the EMS-based virtual bumps Measures: force gauge for force measurement, questionnaire | The EMS-based approach can substitute the vibro-based approach for virtual bumps with an amplitude greater than 3 mm |
| Faltaous et al. [33] | Investigated which muscles create believable haptic feedback that emulates the weight of virtual objects | Flexor carpi ulnaris, brachioradialis, biceps brachii, triceps brachii | OptiTrack 13W optical tracking system, EMS-system: Let-Your-Body-Move, EMS signal generators: SEM 43 Digital EMS/TENS | Form: - I: - V: - PW: - F: - EL: - | Sample: n = 10 (3 female) Age: MD = 29.5, SD = 12.5 Scope: How stimulating four different muscles affects the perceived weight sensation Measures: Self-reported feedback (7-point Likert scale) for the perceived weight, intensity, and comfort | Biceps brachii and triceps brachii increase the perceived weight; biceps brachii has the highest actuation intensity; brachioradialis provides the most comfortable actuation |
| Galofaro et al. [34] | Experimental setup designed to augment the interaction with VR objects by generating a haptic sensation of weight in the antagonist muscles | Biceps/triceps | Teslasuit; Oculus Rift S; Unity 3D; ergospirometer Cosmed K5; IMUs; force sensor FUTEK, FSH04416; acquisition board Quanser QPIDe | Form: - I: Up to 150 mA V: Up to 60 V PW: 1–60 μs F: 60 Hz EL: - | Sample: n = 12 (10 female) Age: MD = 27.4, SD = 3.8 Scope: Track the arm movement of a VR avatar while holding a virtual cube under three conditions: (i) physical feedback, (ii) EMS feedback, (iii) visual feedback Measures: IMUs for angle measurement, force sensor for force measurement, 7-point Likert scale for pleasantness and naturalness | NMES does not interfere with the range of motion but affects the smoothness of the natural movement; NMES feedback was perceived as “slightly uncomfortable”, but significantly more natural than only visual feedback |
References
- Speicher, M.; Hall, B.D.; Nebeling, M. What is Mixed Reality? In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019. [Google Scholar] [CrossRef]
- Ramsamy, P.; Haffegee, A.; Jamieson, R.; Alexandrov, V. Using Haptics to Improve Immersion in Virtual Environments. In Proceedings of the Computational Science—ICCS 2006, Berlin, Heidelberg, 28–31 May 2006; pp. 603–609. [Google Scholar]
- Oakley, I.; Brewster, S.; Gray, P. Can you feel the force? An investigation of haptic collaboration in shared editors. In Proceedings of the EuroHaptics, Birmingham, UK, 1–4 July 2001; Volume 2001, pp. 54–59. [Google Scholar]
- Slater, M. Presence and The Sixth Sense. Presence 2002, 11, 435–439. [Google Scholar] [CrossRef]
- Insko, B.E. Passive Haptics Significantly Enhances Virtual Environments. Ph.D. Thesis, University of North Carolina, Chapel Hill, NC, USA, 2001. [Google Scholar]
- Slater, M.; Usoh, M.; Steed, A. Depth of Presence in Virtual Environments. Presence 1994, 3, 130–144. [Google Scholar] [CrossRef]
- Gibbs, J.; Gillies, M.; Pan, X. A Comparison of the Effects of Haptic and Visual Feedback on Presence in Virtual Reality. Int. J.-Hum.-Comput. Stud. 2021, 157, 102717. [Google Scholar] [CrossRef]
- Sallnäs, E.L. Haptic Feedback Increases Perceived Social Presence. In Proceedings of the Haptics: Generating and Perceiving Tangible Sensations, Berlin, Heidelberg, 21 July 2010; pp. 178–185. [Google Scholar]
- Purves, D.; Augustine, G.J.; Fitzpatrick, D.; Hall, W.C.; LaMantia, A.S.; McNamara, J.O.; Williams, S.M. Neuroscience, 3rd ed.; Sinauer Associates: Sunderland, MA, USA, 2004; pp. 192–193. [Google Scholar]
- Hannaford, B.; Okamura, A.M. Haptics. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Kaya, D.; Yosmaoglu, B.; Doral, M.N. Proprioception in Orthopaedics, Sports Medicine and Rehabilitation; Springer: Cham, Switzerland, 2018; pp. 3–4. [Google Scholar]
- Choi, I.; Hawkes, E.W.; Christensen, D.L.; Ploch, C.J.; Follmer, S. Wolverine: A wearable haptic interface for grasping in virtual reality. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 986–993. [Google Scholar] [CrossRef]
- Zhang, S.; Fu, Q.; Guo, S.; Fu, Y. Coordinative Motion-Based Bilateral Rehabilitation Training System with Exoskeleton and Haptic Devices for Biomedical Application. Micromachines 2019, 10, 8. [Google Scholar] [CrossRef] [PubMed]
- Akahane, K.; Hyun, J.; Kumazawa, I.; Sato, M. Two-Handed Multi-finger String-Based Haptic Interface SPIDAR-8. In Multi-Finger Haptic Interaction; Springer: London, UK, 2013; pp. 109–147. [Google Scholar] [CrossRef]
- Hoshi, T.; Takahashi, M.; Iwamoto, T.; Shinoda, H. Noncontact Tactile Display Based on Radiation Pressure of Airborne Ultrasound. IEEE Trans. Haptics 2010, 3, 155–165. [Google Scholar] [CrossRef] [PubMed]
- Raza, A.; Hassan, W.; Ogay, T.; Hwang, I.; Jeon, S. Perceptually correct haptic rendering in mid-air using ultrasound phased array. IEEE Trans. Ind. Electron. 2020, 67, 739–745. [Google Scholar] [CrossRef]
- Fan, L.; Song, A.; Zhang, H. Development of an Integrated Haptic Sensor System for Multimodal Human-Computer Interaction Using Ultrasonic Array and Cable Robot. IEEE Sens. J. 2022, 22, 4634–4643. [Google Scholar] [CrossRef]
- Kruijff, E.; Schmalstieg, D.; Beckhaus, S. Using Neuromuscular Electrical Stimulation for Pseudo-Haptic Feedback. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology, New York, NY, USA, 1–3 November 2006; pp. 316–319. [Google Scholar] [CrossRef]
- Yem, V.; Kajimoto, H. Comparative Evaluation of Tactile Sensation by Electrical and Mechanical Stimulation. IEEE Trans. Haptics 2017, 10, 130–134. [Google Scholar] [CrossRef] [PubMed]
- Magalhães, P.; Figueirêdo, B.B.; Vasconcelos, A.; de Andrade, E.M.; Dornelas de Andrade, A.; Reinaux, C. Is transcutaneous electrical muscle stimulation an alternative for preventing acquired muscle weakness in the pediatric intensive care unit? A scoping review. Pediatr. Pulmonol. 2019, 54, 1108–1116. [Google Scholar] [CrossRef] [PubMed]
- Šarabon, N.; Kozinc, Z.; Löfler, S.; Hofer, C. Resistance Exercise, Electrical Muscle Stimulation, and Whole-Body Vibration in Older Adults: Systematic Review and Meta-Analysis of Randomized Controlled Trials. J. Clin. Med. 2020, 9, 2902. [Google Scholar] [CrossRef] [PubMed]
- Bedwell, C.; Dowswell, T.; Neilson, J.P.; Lavender, T. The use of transcutaneous electrical nerve stimulation (TENS) for pain relief in labour: A review of the evidence. Midwifery 2011, 27, e141–e148. [Google Scholar] [CrossRef]
- Doucet, B.; Lam, A.; Griffin, L. Neuromuscular Electrical Stimulation for Skeletal Muscle Function. Yale J. Biol. Med. 2012, 85, 201–215. [Google Scholar] [PubMed]
- Behringer, M.; Grützner, S.; Montag, J.; McCourt, M.; Ring, M.; Mester, J. Effects of stimulation frequency, amplitude, and impulse width on muscle fatigue. Muscle Nerve 2016, 53, 608–616. [Google Scholar] [CrossRef]
- Lopes, P.; You, S.J.; Ion, A.; Baudisch, P.; ACM. Adding Force Feedback to Mixed Reality Experiences and Games using Electrical Muscle Stimulation. In Proceedings of the 2018 Chi Conference on Human Factors in Computing Systems (Chi 2018), Montreal, Canada, 21–27 April 2018; p. 13. [Google Scholar] [CrossRef]
- Pfeiffer, M.; Kroger, T.; Seifert, J.; Somaskantharajan, S.; Jahnich, L.; Steinblum, T.; Speckamp, J.; Medrano, S.N.; Assoc Comp, M. WONDER—Enhancing VR Training with Electrical Muscle Stimulation. In Proceedings of the Chi Ea’19 Extended Abstracts: Extended Abstracts of the 2019 Chi Conference on Human Factors in Computing Systems, New York, NY, USA, 4–9 May 2019; p. 6. [Google Scholar] [CrossRef]
- Lopes, P.; Baudisch, P. Muscle-Propelled Force Feedback: Bringing Force Feedback to Mobile Devices. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, New York, NY, USA, 27 April–2 May 2013. [Google Scholar] [CrossRef]
- Khamis, M.; Schuster, N.; George, C.; Pfeiffer, M. ElectroCutscenes: Realistic Haptic Feedback in Cutscenes of Virtual Reality Games Using Electric Muscle Stimulation. In Proceedings of the 25th ACM Symposium on Virtual Reality Software and Technology, New York, NY, USA, 12–15 November 2019. [Google Scholar] [CrossRef]
- Lee, J.; Kim, Y.; Jung, H. Electrically Elicited Force Response Characteristics of Forearm Extensor Muscles for Electrical Muscle Stimulation-Based Haptic Rendering. Sensors 2020, 20, 5669. [Google Scholar] [CrossRef] [PubMed]
- Lopes, P.; You, S.; Cheng, L.P.; Marwecki, S.; Baudisch, P.; ACM. Providing Haptics to Walls & Heavy Objects in Virtual Reality by Means of Electrical Muscle Stimulation. In Proceedings of the ACM SIGCHI Conference on Human Factors in Computing Systems (CHI), New York, NY, USA, 6–11 May 2017; pp. 1471–1482. [Google Scholar] [CrossRef]
- Harris, M.; McCarty, M.; Montes, A.; Celik, O.; ASME. Enhancing haptic effects displayed via neuromuscular electrical stimulation. In In Proceedings of the Asme 9th Annual Dynamic Systems and Control Conference, Minneapolis, MN, USA, 12–14 October 2016; American Society of Mechanical Engineers: New York, NY, USA, 2017; Volume 1, p. 8. [Google Scholar]
- Kurita, Y.; Ishikawa, T.; Tsuji, T. Stiffness Display by Muscle Contraction Via Electric Muscle Stimulation. IEEE Robot. Autom. Lett. 2016, 1, 1014–1019. [Google Scholar] [CrossRef]
- Faltaous, S.; Prochazka, M.; Auda, J.; Keppel, J.; Wittig, N.; Gruenefeld, U.; Schneegass, S. Give Weight to VR: Manipulating Users’ Perception of Weight in Virtual Reality with Electric Muscle Stimulation. In Proceedings of the Mensch Und Computer 2022, MuC’22, Darmstadt, Germany, 4–7 September 2022; ACM: New York, NY, USA; pp. 533–538. [Google Scholar] [CrossRef]
- Galofaro, E.; D’Antonio, E.; Lotti, N.; Masia, L. Rendering immersive haptic force feedback via neuromuscular electrical stimulation. Sensors 2022, 22, 5069. [Google Scholar] [CrossRef] [PubMed]
- Ishimaru, T.; Saga, S.; IEEE. Virtual bumps display based on electrical muscle stimulation. In Proceedings of the IEEE Haptics Symposium (HAPTICS), IEEE Haptics Symposium, New York, NY, USA, 28–31 March 2020; pp. 96–101. [Google Scholar]
- Lopes, P.; Ion, A.; Mueller, W.; Hoffmann, D.; Jonell, P.; Baudisch, P.; Assoc Comp, M. Proprioceptive Interaction. In Proceedings of the Chi 2015: 33rd Annual Chi Conference on Human Factors in Computing Systems, Seoul, Republic of Korea, 18–23 April 2015; pp. 939–948. [Google Scholar] [CrossRef]
- Lopes, P.; Jonell, P.; Baudisch, P. Affordance plus plus: Allowing objects to communicate dynamic use. In Proceedings of the Chi 2015: Annual Chi Conference on Human Factors in Computing Systems, Seoul, Republic of Korea, 18–23 April 2015; pp. 2515–2524. [Google Scholar] [CrossRef]
- Ebisu, A.; Hashizume, S.; Suzuki, K.; Ishii, A.; Sakashita, M.; Ochiai, Y. Stimulated Percussions: Method to Control Human for Learning Music by Using Electrical Muscle Stimulation. In Proceedings of the 8th Augmented Human International Conference, AH’17, New York, NY, USA, 16–18 March 2017. [Google Scholar] [CrossRef]
- Farbiz, F.; Yu, Z.H.; Manders, C.; Ahmad, W. An Electrical Muscle Stimulation Haptic Feedback for Mixed Reality Tennis Game. In Proceedings of the ACM SIGGRAPH 2007 Posters, New York, NY, USA, 27 November 2007. [Google Scholar] [CrossRef]
- Pfeiffer, M.; Schneegaß, S.; Alt, F. Supporting Interaction in Public Space with Electrical Muscle Stimulation. In Proceedings of the 2013 ACM Conference on Pervasive and Ubiquitous Computing Adjunct Publication, New York, NY, USA, 8–12 September 2013; pp. 5–8. [Google Scholar] [CrossRef]
- Korres, G.; Park, W.; Eid, M. A Comparison of Vibrotactile Feedback and Electrical Muscle Stimulation (EMS) for Motor Response During Active Hand Movement. IEEE Trans. Haptics 2022, 15, 74–78. [Google Scholar] [CrossRef] [PubMed]
- Pfeiffer, M.; Duente, T.; Rohs, M. Let Your Body Move: A Prototyping Toolkit for Wearable Force Feedback with Electrical Muscle Stimulation. In Proceedings of the 18th International Conference on Human-Computer Interaction with Mobile Devices and Services, MobileHCI’16, New York, NY, USA, 3–6 September 2016; pp. 418–427. [Google Scholar] [CrossRef]
- TeslaSuit. 2023. Available online: https://teslasuit.io/products/teslasuit-4/ (accessed on 7 August 2023).
- Tamaki, E.; Chan, T.; Iwasaki, K. UnlimitedHand: Input and output hand gestures with less calibration time. In Proceedings of the Adjunct Proceedings of the 29th Annual ACM Symposium on User Interface Software and Technology, Tokyo, Japan, 16–19 October 2016; pp. 163–165. [Google Scholar]
- Hosono, S.; Miyake, T.; Miyake, S.; Tamaki, E. Feedback Method of Force Controlled by Electrical Muscle Stimulation Based on Infrared Optical Sensing. Front. Virtual Real. 2022, 3, 880238. [Google Scholar] [CrossRef]

| Pulse Form | References |
|---|---|
| Biphasic | [18,27,29,31,36] |
| Monophasic Rectangular | [32] |
| Pulse Amplitude | References |
| 10 mA to 27 mA | [18,25,30] |
| Limited to 80 mA | [31] |
| Limited to 100 mA | [36,37] |
| Limited to 150 mA | [34] |
| Pulse Width | References |
| 25 μs to 45 μs | [31] |
| Up to 60 μs | [34] |
| 70 μs to 200 μs | [30] |
| 100 μs | [28] |
| 100 μs to 420 μs | [25] |
| 150 μs | [36] |
| 150 μs to 250 μs | [37] |
| 260 μs | [40] |
| 290 μs | [27] |
| Up to 300 μs | [31] |
| 400 μs | [29,32] |
| 500 μs | [35] |
| 800 μs | [38] |
| Pulse Frequency | References |
| 3 Hz to 5 Hz | [18] |
| 20 Hz to 40 Hz | [29] |
| 25 Hz | [27] |
| 50 Hz | [32] |
| 50 Hz to 70 Hz | [38,40] |
| 60 Hz | [34,35] |
| 80 Hz to 140 Hz | [37] |
| 100 Hz | [28] |
| 120 Hz | [36] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vrontos, A.; Nitsch, V.; Brandl, C. Electrical Muscle Stimulation for Kinesthetic Feedback in AR/VR: A Systematic Literature Review. Multimodal Technol. Interact. 2024, 8, 7. https://doi.org/10.3390/mti8020007
Vrontos A, Nitsch V, Brandl C. Electrical Muscle Stimulation for Kinesthetic Feedback in AR/VR: A Systematic Literature Review. Multimodal Technologies and Interaction. 2024; 8(2):7. https://doi.org/10.3390/mti8020007
Chicago/Turabian StyleVrontos, Apostolos, Verena Nitsch, and Christopher Brandl. 2024. "Electrical Muscle Stimulation for Kinesthetic Feedback in AR/VR: A Systematic Literature Review" Multimodal Technologies and Interaction 8, no. 2: 7. https://doi.org/10.3390/mti8020007
APA StyleVrontos, A., Nitsch, V., & Brandl, C. (2024). Electrical Muscle Stimulation for Kinesthetic Feedback in AR/VR: A Systematic Literature Review. Multimodal Technologies and Interaction, 8(2), 7. https://doi.org/10.3390/mti8020007