
Moving Object Detection Based on a Combination of Kalman Filter and Median Filtering



Abstract
:1. Introduction
2. Materials and Methods
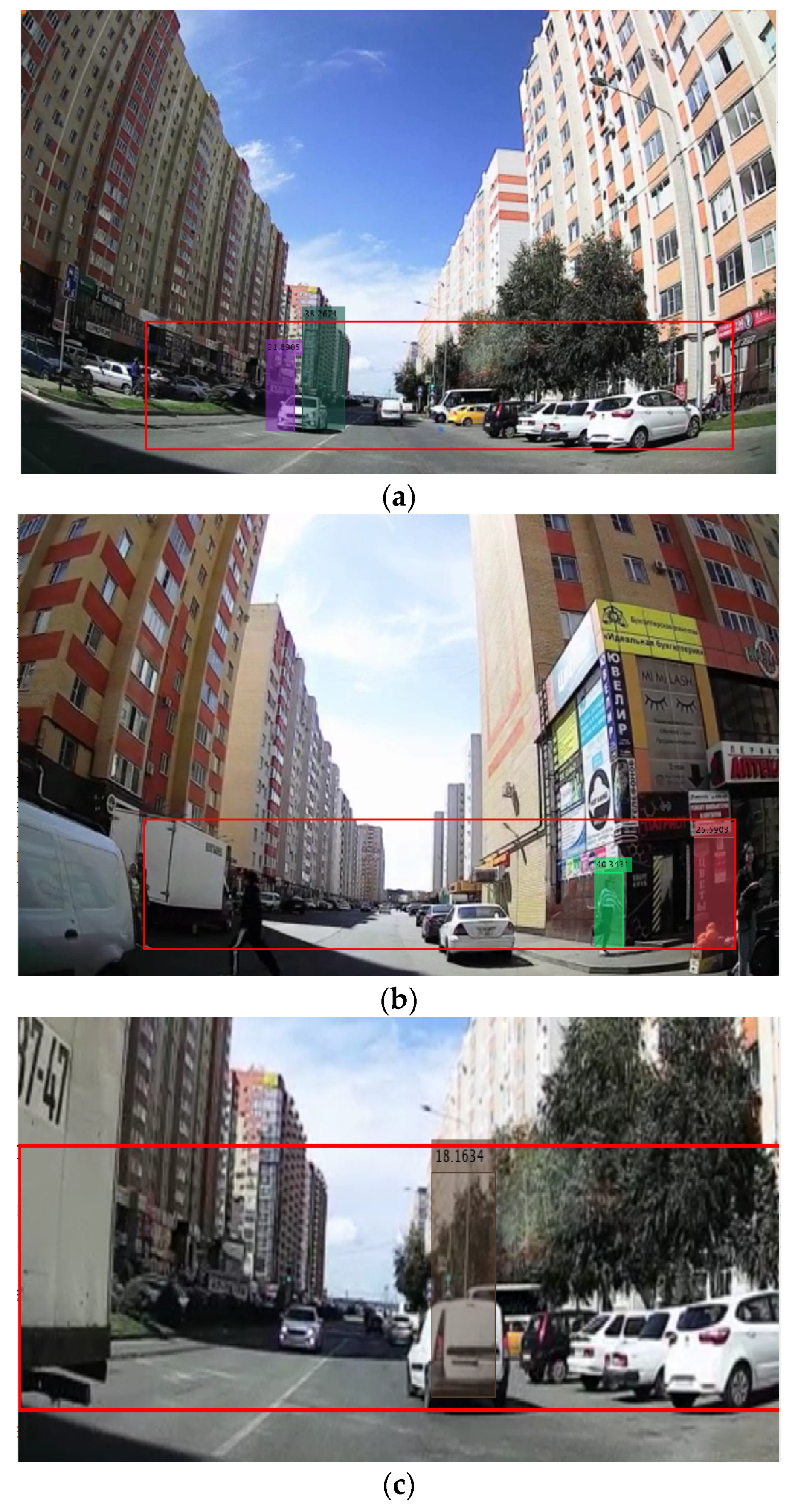
3. Results
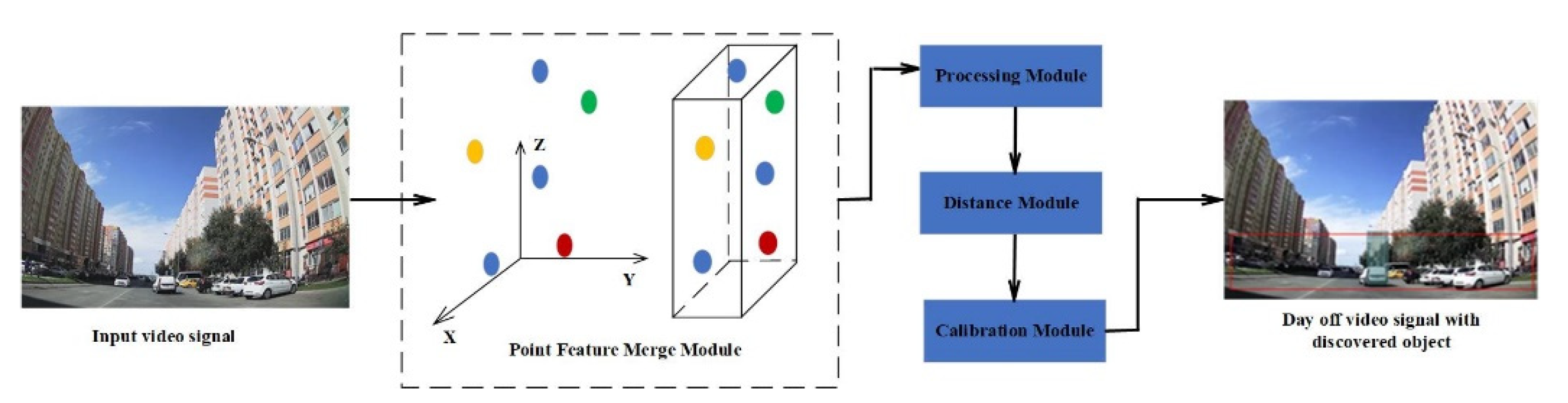
3.1. Proposed Algorithm
| Algorithm 1: Data filtering using median filter and Kalman filter built using the Goldschmidt algorithm to calculate the Kalman gain |
| Input data: 1: Calibration of sensor values: Determination of the internal parameters of the camera matrix : 2. 3. 4. 5. 6. 7. Definition of homography matrix: 8. Projection matrix calculation : 9. Calculation of median filtering values: 10. |
| gKalman filtering: Prediction Calculation: 11: |
| 12: Kalman gain calculation: 13: 14: 15. 16: If , then 17: other , Update Calculation: 18: 19: |
3.2. Numerical and Software Implementation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wong, C.-C.; Chien, M.-Y.; Chen, R.-J.; Aoyama, H.; Wong, K.-Y. Moving Object Prediction and Grasping System of Robot Manipulator. IEEE Access 2022, 10, 20159–20172. [Google Scholar] [CrossRef]
- Singha, A.; Bhowmik, M.K. Salient Features for Moving Object Detection in Adverse Weather Conditions During Night Time. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 3317–3331. [Google Scholar] [CrossRef]
- Shi, W.; Shan, R.; Okada, Y. A Navigation System for Visual Impaired People Based on Object Detection. In Proceedings of the 2022 12th International Congress on Advanced Applied Informatics (IIAI-AAI), Kanazawa, Japan, 2–8 July 2022; pp. 354–358. [Google Scholar]
- Baiju, P.S.; George, S.N. An Automated Unified Framework for Video Deraining and Simultaneous Moving Object Detection in Surveillance Environments. IEEE Access 2020, 8, 128961–128972. [Google Scholar] [CrossRef]
- Sultana, M.; Mahmood, A.; Jung, S.K. Unsupervised Moving Object Detection in Complex Scenes Using Adversarial Regularizations. IEEE Trans. Multimedia 2021, 23, 2005–2018. [Google Scholar] [CrossRef]
- Grishaeva, S.A.; Barmenkov, E.Y.; Borisova, E.V. Features of Advanced Product Quality Planning in the Space Industry Enterprises. In Proceedings of the 2021 International Conference on Quality Management, Transport and Information Security, Information Technologies (IT&QM&IS), Yaroslavl, Russia, 6–10 September 2021; pp. 293–297. [Google Scholar]
- Rahmadya, B.; Sun, R.; Takeda, S.; Kagoshima, K.; Umehira, M. A Framework to Determine Secure Distances for Either Drones or Robots Based Inventory Management Systems. IEEE Access 2020, 8, 170153–170161. [Google Scholar] [CrossRef]
- Lee, T.-Y.; Skvortsov, V.; Kim, M.-S.; Han, S.-H.; Ka, M.-H. Application of Band FMCW Radar for Road Curvature Estimation in Poor Visibility Conditions. IEEE Sens. J. 2018, 18, 5300–5312. [Google Scholar] [CrossRef]
- Wang, L.; Wang, T.; Liu, H.; Hu, L.; Han, Z.; Liu, W.; Guo, N.; Qi, Y.; Xu, Y. An Automated Calibration Method of Ultrasonic Probe Based on Coherent Point Drift Algorithm. IEEE Access 2018, 6, 8657–8665. [Google Scholar] [CrossRef]
- Balemans, N.; Hellinckx, P.; Steckel, J. Predicting LiDAR Data from Sonar Images. IEEE Access 2021, 9, 57897–57906. [Google Scholar] [CrossRef]
- Toth, M.; Stojcsics, D.; Domozi, Z.; Lovas, I. Stereo Odometry Based Realtime 3D Reconstruction. In Proceedings of the 2018 IEEE 16th International Symposium on Intelligent Systems and Informatics (SISY), Subotica, Serbia, 13–15 September 2018; pp. 000321–000326. [Google Scholar]
- Deng, Q.; Li, X.; Ni, P.; Li, H.; Zheng, Z. Enet-CRF-Lidar: Lidar and Camera Fusion for Multi-Scale Object Recognition. IEEE Access 2019, 7, 174335–174344. [Google Scholar] [CrossRef]
- Huang, J.-K.; Grizzle, J.W. Improvements to Target-Based 3D LiDAR to Camera Calibration. IEEE Access 2020, 8, 134101–134110. [Google Scholar] [CrossRef]
- Choe, J.; Joo, K.; Imtiaz, T.; Kweon, I.S. Volumetric Propagation Network: Stereo-LiDAR Fusion for Long-Range Depth Estimation. IEEE Robot Autom. Lett. 2021, 6, 4672–4679. [Google Scholar] [CrossRef]
- Yang, W.; Gong, Z.; Huang, B.; Hong, X. Lidar With Velocity: Correcting Moving Objects Point Cloud Distortion from Oscillating Scanning Lidars by Fusion with Camera. IEEE Robot Autom. Lett. 2022, 7, 8241–8248. [Google Scholar] [CrossRef]
- Qiu, K.; Qin, T.; Pan, J.; Liu, S.; Shen, S. Real-Time Temporal and Rotational Calibration of Heterogeneous Sensors Using Motion Correlation Analysis. IEEE Trans. Robot. 2021, 37, 587–602. [Google Scholar] [CrossRef]
- Zhangyu, W.; Guizhen, Y.; Xinkai, W.; Haoran, L.; Da, L. A Camera and LiDAR Data Fusion Method for Railway Object Detection. IEEE Sens. J. 2021, 21, 13442–13454. [Google Scholar] [CrossRef]
- Zhang, Z.; Liang, Z.; Zhang, M.; Zhao, X.; Li, H.; Yang, M.; Tan, W.; Pu, S. RangeLVDet: Boosting 3D Object Detection in LIDAR with Range Image and RGB Image. IEEE Sens. J. 2022, 22, 1391–1403. [Google Scholar] [CrossRef]
- Zhao, X.; Sun, P.; Xu, Z.; Min, H.; Yu, H. Fusion of 3D LIDAR and Camera Data for Object Detection in Autonomous Vehicle Applications. IEEE Sens. J. 2020, 20, 4901–4913. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Huang, Y.; Rong, Y.; Li, G.; Meng, J.; Xie, Y.; Zhang, X. A Novel Extrinsic Calibration Method of Mobile Manipulator Camera and 2D-LiDAR via Arbitrary Trihedron-Based Reconstruction. IEEE Sens. J. 2021, 21, 24672–24682. [Google Scholar] [CrossRef]
- Ma, L.; Li, Y.; Li, J.; Tan, W.; Yu, Y.; Chapman, M.A. Multi-Scale Point-Wise Convolutional Neural Networks for 3D Object Segmentation from Lidar Point Clouds in Large-Scale Environments. IEEE Trans. Intell. Transp. Syst. 2021, 22, 821–836. [Google Scholar] [CrossRef]
- Fu, B.; Wang, Y.; Ding, X.; Jiao, Y.; Tang, L.; Xiong, R. LiDAR-Camera Calibration Under Arbitrary Configurations: Observability and Methods. IEEE Trans. Instrum. Meas. 2020, 69, 3089–3102. [Google Scholar] [CrossRef] [Green Version]
- Cui, M.; Zhu, Y.; Liu, Y.; Liu, Y.; Chen, G.; Huang, K. Dense Depth-Map Estimation Based on Fusion of Event Camera and Sparse LiDAR. IEEE Trans. Instrum. Meas. 2022, 71, 7500111. [Google Scholar] [CrossRef]
- Yuan, C.; Liu, X.; Hong, X.; Zhang, F. Pixel-Level Extrinsic Self Calibration of High Resolution LiDAR and Camera in Targetless Environments. IEEE Robot Autom. Lett. 2021, 6, 7517–7524. [Google Scholar] [CrossRef]
- Csontho, M.; Rovid, A.; Szalay, Z. Significance of Image Features in Camera-LiDAR Based Object Detection. IEEE Access 2022, 10, 61034–61045. [Google Scholar] [CrossRef]
- Li, Y.; Deng, J.; Zhang, Y.; Ji, J.; Li, H.; Zhang, Y. A Close Look at the Integration of LiDAR, Millimeter-Wave Radar, and Camera for Accurate 3D Object Detection and Tracking. IEEE Robot Autom. Lett. 2022, 7, 11182–11189. [Google Scholar] [CrossRef]
- Sualeh, M.; Kim, G.-W. Visual-LiDAR Based 3D Object Detection and Tracking for Embedded Systems. IEEE Access 2020, 8, 156285–156298. [Google Scholar] [CrossRef]
- Giraldo, J.H.; Javed, S.; Sultana, M.; Jung, S.K.; Bouwmans, T. The Emerging Field of Graph Signal Processing for Moving Object Segmentation. In International Workshop on Frontiers of Computer Vision; Springer: Cham, Switzerland, 2021; pp. 31–45. [Google Scholar]
- Zhang, W.; Li, X.; Ma, H.; Luo, Z.; Li, X. Universal Domain Adaptation in Fault Diagnostics with Hybrid Weighted Deep Adversarial Learning. IEEE Trans. Industr. Inform. 2021, 17, 7957–7967. [Google Scholar] [CrossRef]
- Thanh, D.N.H.; Hieu, L.M.; Enginoglu, S. An Iterative Mean Filter for Image Denoising. IEEE Access 2019, 7, 167847–167859. [Google Scholar] [CrossRef]
- Liu, H.; Hu, F.; Su, J.; Wei, X.; Qin, R. Comparisons on Kalman-Filter-Based Dynamic State Estimation Algorithms of Power Systems. IEEE Access 2020, 8, 51035–51043. [Google Scholar] [CrossRef]
- Pereira, P.T.L.; Paim, G.; da Costa, P.U.L.; da Costa, E.A.C.; de Almeida, S.J.M.; Bampi, S. Architectural Exploration for Energy-Efficient Fixed-Point Kalman Filter VLSI Design. IEEE Trans. Very Large Scale Integr. VLSI Syst. 2021, 29, 1402–1415. [Google Scholar] [CrossRef]
- Zhang, H.; Zhou, X.; Wang, Z.; Yan, H. Maneuvering Target Tracking with Event-Based Mixture Kalman Filter in Mobile Sensor Networks. IEEE Trans. Cybern. 2020, 50, 4346–4357. [Google Scholar] [CrossRef]
- Onat, A. A Novel and Computationally Efficient Joint Unscented Kalman Filtering Scheme for Parameter Estimation of a Class of Nonlinear Systems. IEEE Access 2019, 7, 31634–31655. [Google Scholar] [CrossRef]
- Peyman, S.; Saeid, H.; Simon, H. Kalman Filter. In Nonlinear Filters; Wiley: Hoboken, NJ, USA, 2022; pp. 49–70. [Google Scholar]
- Sayed, A.H. Kalman Filter. In Adaptive Filters; John Wiley & Sons, Inc.: Hoboken, NJ, USA; pp. 104–110.
- Piso, D.; Bruguera, J.D. Variable Latency Goldschmidt Algorithm Based on a New Rounding Method and a Remainder Estimate. IEEE Trans. Comput. 2011, 60, 1535–1546. [Google Scholar] [CrossRef]
- Green, O. Efficient Scalable Median Filtering Using Histogram-Based Operations. IEEE Trans. Image Process. 2018, 27, 2217–2228. [Google Scholar] [CrossRef] [PubMed]
- Lidar Kalman Filter Median. Available online: https://github.com/KalitaDiana/Lidar_Kalman_filter_median/blob/main/Lidar_Kalman_filter.m (accessed on 20 October 2022).



{kind=link}
{kind=link}
| No | Known Algorithm | Algorithm 1 | ||
|---|---|---|---|---|
| Error | Temporary Delay | Error | Temporary Delay | |
| 1 | 0.89 | 0.17 | 0.48 | 0.12 |
| 2 | 0.65 | 0.17 | 0.57 | 0.14 |
| 3 | 0.87 | 0.16 | 0.32 | 0.14 |
| 4 | 0.35 | 0.18 | 0.13 | 0.16 |
| 5 | 0.78 | 0.19 | 0.07 | 0.15 |
| 6 | 0.26 | 0.23 | 0.18 | 0.19 |
| 7 | 0.37 | 0.22 | 0.33 | 0.19 |
| 8 | 0.58 | 0.27 | 0.31 | 0.22 |
| 9 | 0.82 | 0.25 | 0.55 | 0.25 |
| 10 | 0.82 | 0.25 | 0.39 | 0.22 |
| Indicator | Algorithm | |||||
|---|---|---|---|---|---|---|
| [35] | [31] | Algorithm 1 | ||||
| Delay | RMSE | Delay | RMSE | Delay | RMSE | |
| 1.0833 | 0.9871 | 0.9061 | 0.8722 | 0.3734 | 0.2135 | |
| 1.0879 | 1.1109 | 0.9070 | 0.9969 | 0.3839 | 0.3368 | |
| 1.0878 | 1.1770 | 0.9064 | 1.0622 | 0.3841 | 0.4021 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalita, D.; Lyakhov, P. Moving Object Detection Based on a Combination of Kalman Filter and Median Filtering. Big Data Cogn. Comput. 2022, 6, 142. https://doi.org/10.3390/bdcc6040142
Kalita D, Lyakhov P. Moving Object Detection Based on a Combination of Kalman Filter and Median Filtering. Big Data and Cognitive Computing. 2022; 6(4):142. https://doi.org/10.3390/bdcc6040142
Chicago/Turabian StyleKalita, Diana, and Pavel Lyakhov. 2022. "Moving Object Detection Based on a Combination of Kalman Filter and Median Filtering" Big Data and Cognitive Computing 6, no. 4: 142. https://doi.org/10.3390/bdcc6040142
APA StyleKalita, D., & Lyakhov, P. (2022). Moving Object Detection Based on a Combination of Kalman Filter and Median Filtering. Big Data and Cognitive Computing, 6(4), 142. https://doi.org/10.3390/bdcc6040142