1. Introduction
Forces generated by living cells are indicators of their state of evolution and can be critical regulators of cell adhesion processes [
1]. Microsystems for measuring forces and mechanical properties of different materials at micro/nanoscale have gained an important role for probing biological samples in in vitro mechanobiology experiments [
2,
3]. In particular, the measurement of minute forces without requiring an associated displacement is a critical task. A common drawback in force sensors is the inherent trade-off between the measurement range and sensitivity. Typically, MEMS force sensors do not exhibit the ability to adapt the range and sensitivity depending on the external applied force [
4], which instead would be a desirable feature in many applications. The MEMS force sensor, here presented, allows tunable measurement range and sensitivity, exploiting an electrical servo-assisted mechanism with position-feedback [
5] to keep the mechanical structure in a fixed position
thus allowing to measure an applied external force
offering a virtually infinite mechanical impedance. The device description and operating principle are illustrated in
Section 2, experimental results are presented in
Section 3, and conclusions are given in
Section 4.
2. Servo-Assisted Position-Feedback MEMS Force Sensor
The block diagram of the system is shown in
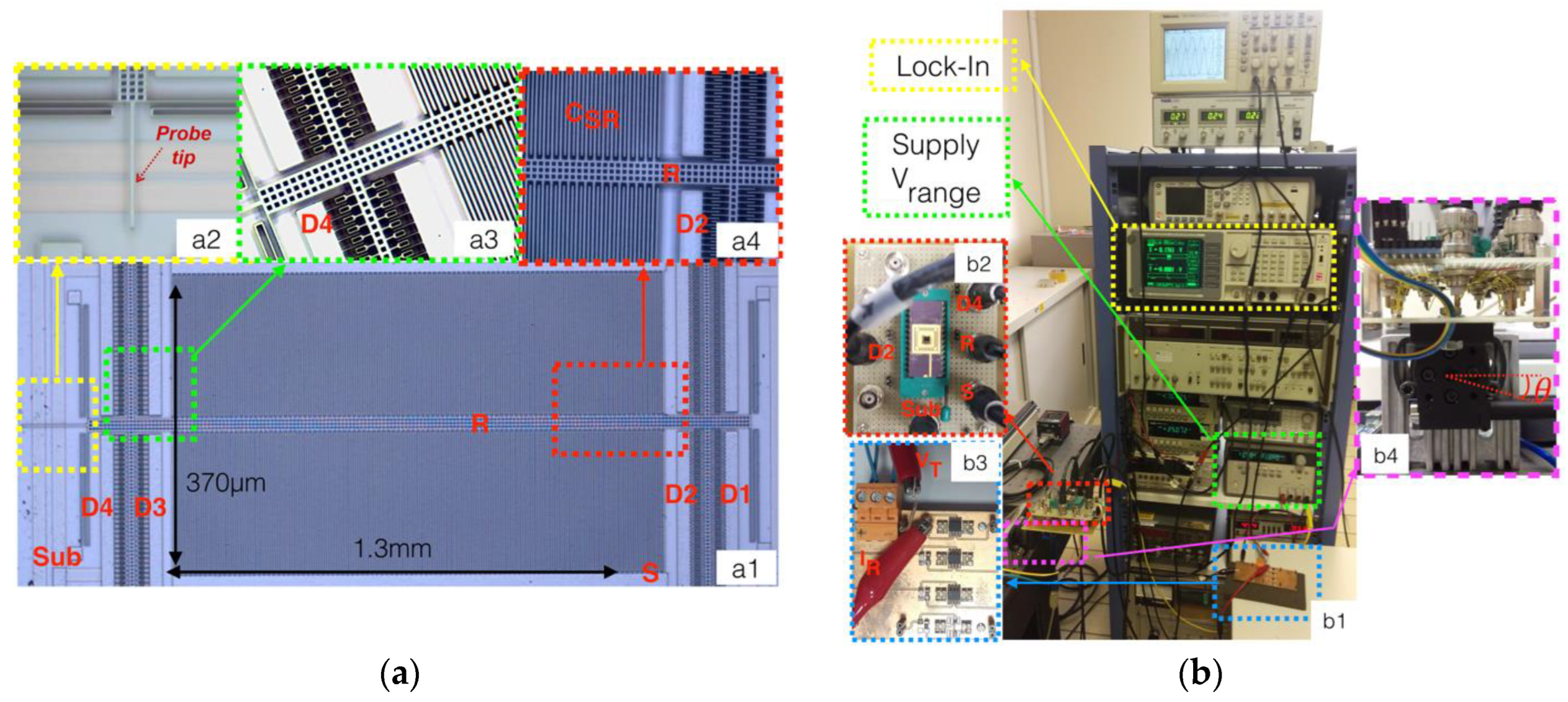
Figure 1, while images of the fabricated MEMS are shown in
Figure 2a. The input voltage
sets the range and sensitivity of force measurement, while the input voltage
sets the position
that represents the working point of the probe tip.
The static equilibrium of all forces acting on the shuttle R integral with the tip, without an applied external force
, leads to:
where
and
represent the electrostatic forces generated by the variable-area driving actuators D2 and D4;
and
represent the electro-mechanical transduction factors of the two drivers, respectively [
2]. The contribution
represents the elastic force of the suspending springs, while
is the electrostatic force generated by the voltage
required to measure the variable-gap comb sensing capacitance
employing a transimpedance amplifier (OPA656) and a lock-in amplifier (Stanford SR850). The sensing voltage
, with
= 1 V
peak, is internally downscaled by A = 0.1 to set
to 0.1 V
peak, so to prevent pull-in. The sensing frequency
is set to 100 kHz far from the resonant mechanical frequency at around 2 kHz.
The initial zero-calibration procedure nulls the output voltage thanks to the zero-calibration feedback loop that modulates the voltage .
The feedback loop imposes
, where
is the output voltage of the transimpedance amplifier which, thanks to the lock-in amplifier, it results linearly dependent to the sensing capacitance
and related to the position
as follows:
where
is the feedback resistance of the transimpedance amplifier and k = 1 V
−1 is the scale factor of the lock-in amplifier. This procedure allows to select the required voltage
, and thereafter, to set the required working point
by adjusting the voltage
. This ensures that with
= 0, given the required range and sensitivity, the probe tip is fixed at a desired position
resulting in
= 0.
Once the zero-calibration procedure has ended, the voltage
is kept constant, and the feedback loop is switched to the driver D4 in order to measure the external force
. The position-feedback loop keeps the probe tip fixed at the working position
regardless of the applied force
, producing an equivalent infinite mechanical impedance, i.e. unlimited stiffness. Considering the equilibrium of all forces acting on the device, including the external force, results in:
Linearizing around the working point, it follows that:
where
is the force sensitivity of the system.
Considering a non-linearity error of 1% of the span, the corresponding measurement range is . In such a range the output voltage is linearly related to the applied force within an error of 1%, while the measurement range and sensitivity depend only on the voltage .
3. Experimental Results
Figure 2b shows the setup used to test the device. The weight force controlled by inclination through a motorized ThorLabs MDT693B rotating stage was used as the external reference force. This results in
= mg sin(
θ) where
m = 24 μg is the mass of the movable shuttle,
g = 9.81 m/s
2 is the gravitational acceleration and
θ is the inclination angle.
Figure 3a,b show the measured output voltage
as a function of angle
and external force
, respectively. In
Figure 4a it is represented the sum
as a function of
from which it is possible to estimate
.
Figure 4b reports the sensitivity
S and the transduction factor
derived from fitting of
Figure 4a as function of the input voltage
. Experimental results are in good agreement with the theoretical values of
S obtained using the average value of
. The inset of
Figure 4b shows the measurement range of the external forces considering a non-linearity error lower than 1%, 2% and 3%. Incremental angles corresponding to 0.4 nN forces where consistently detected, leading to a sub-nanonewton resolution.

 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}



