Fusion of UAVSAR and Quickbird Data for Urban Growth Detection †



Abstract
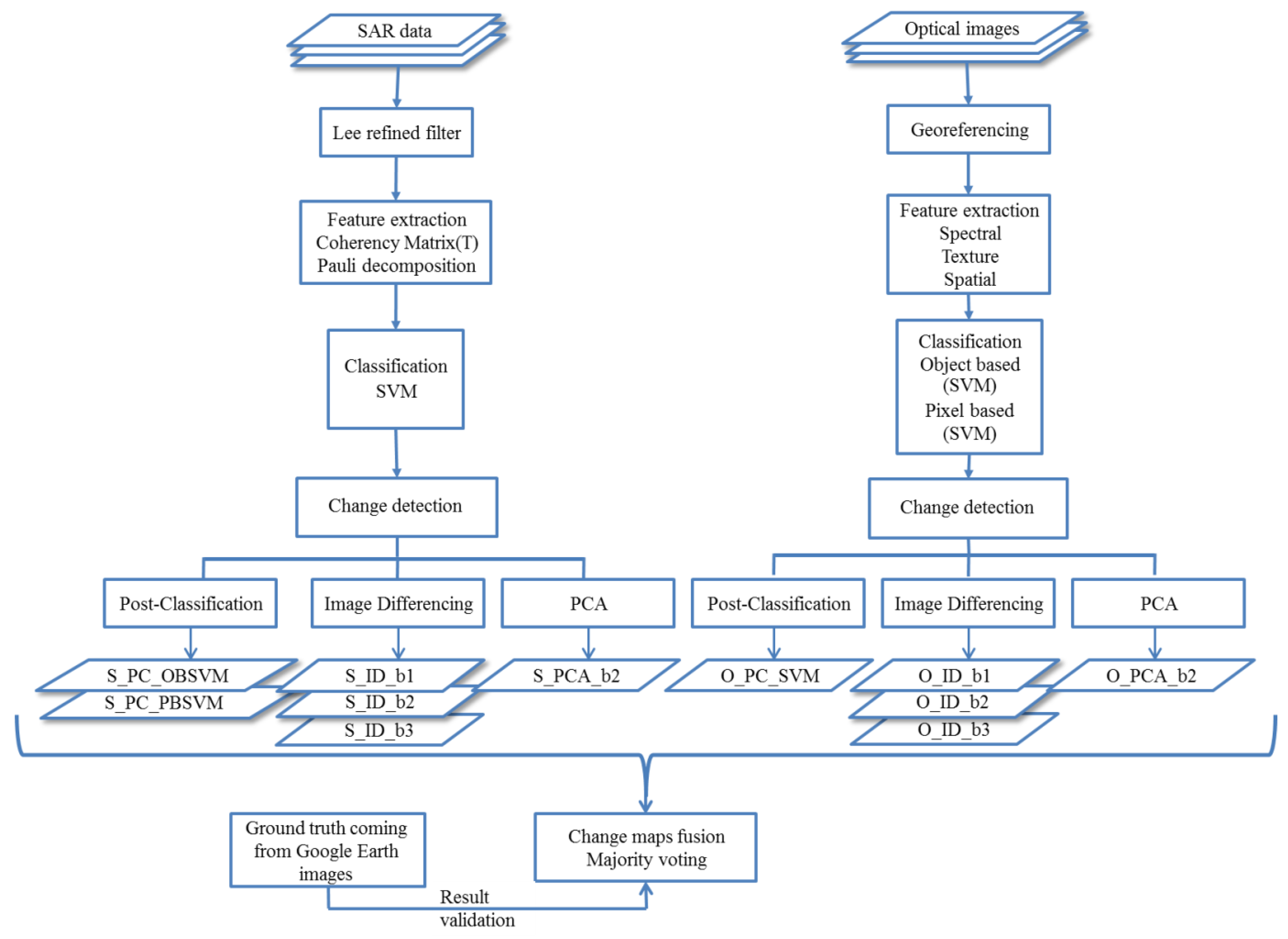
:1. Introduction
2. Experiments
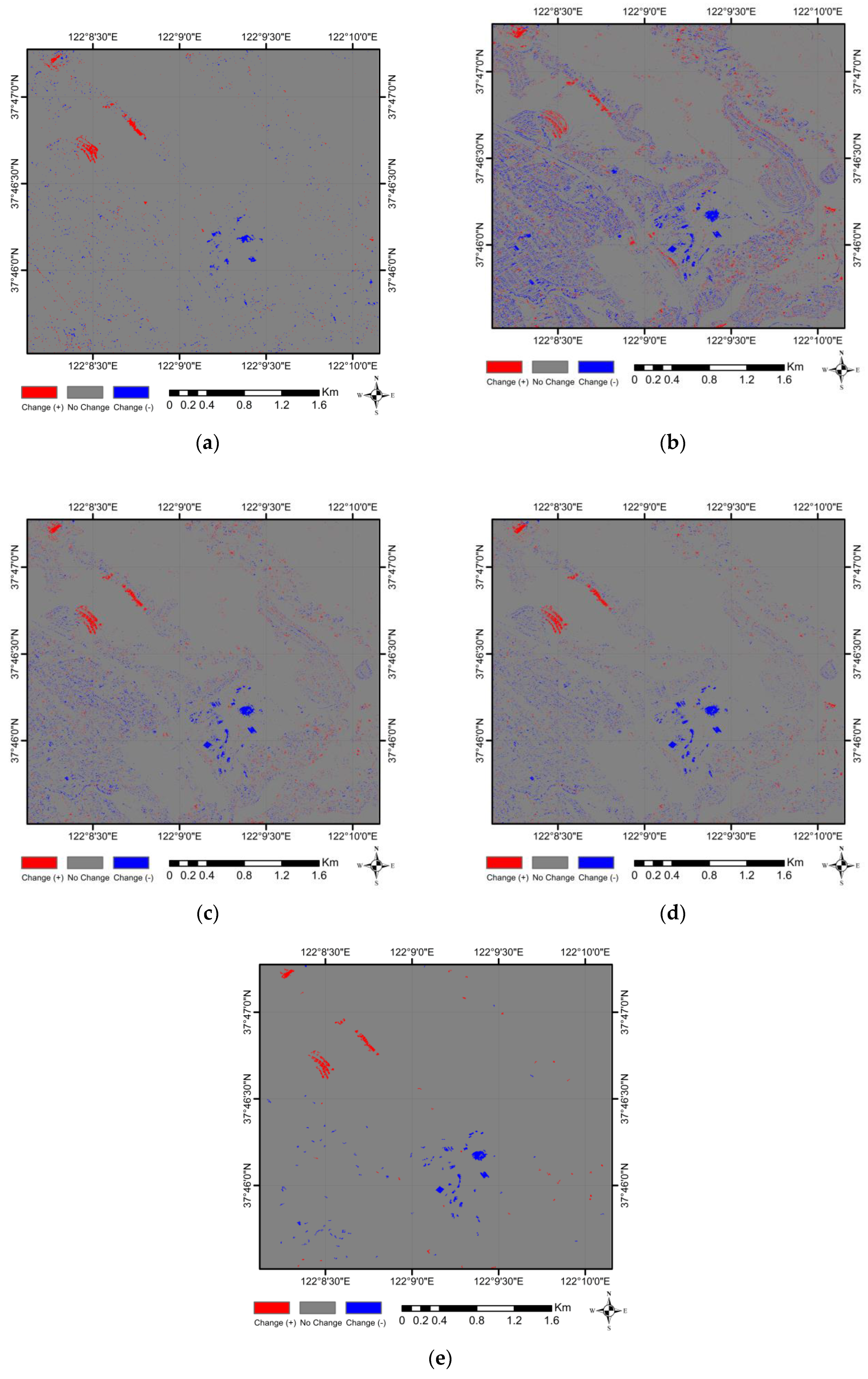
- All maps of the changes obtained from optical and polarimetric images.
- All maps of changes made from optical images.
- All maps of changes made from polarimetric images.
- Chart maps are carefully evaluated.
3. Results and Discussion
5. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| PolSAR | polarimetric synthetic aperture radar |
| OBSVM | object-based support vector machine |
| PBSVM | pixel-based support vector machine |
References
- Xiang, D. Urban Area Information Extraction from Polarimetric SAR Data. Ph.D. Thesis, Royal Institute of Technology, Stockholm, Sweden, 2016. [Google Scholar]
- Shahhosseini, R.; Homayouni, S.; Safari, A. Provide an Automatic Change Detection of Kernel-based in Urban Areas Using Landsat Layered satllite Images, Case Study: Karaj City. J. Olum Fonoon Surv. 2016, 5, 15–34. [Google Scholar]
- Garzelli, A. Wavelet-based fusion of optical and SAR image data over urban area. In Proceedings of the ISPRS Photogrammetric Computer Vision Symposium, Melbourne, Australia, 25 August–1 September 2012. [Google Scholar]
- Pirrone, D. A novel framework for change detection in bi-temporal polarimetric SAR images. Image Signal Process. Remote Sens. 2016, 10004. [Google Scholar] [CrossRef]
- Stefanski, J.; Kuemmerle, T.; Chaskovskyy, O.; Griffiths, P.; Havryluk, V.; Knorn, J.; Korol, N.; Sieber, A.; Waske, B. Mapping land management regimes in western Ukraine using optical and SAR data. Remote Sens. 2014, 6, 5279–5305. [Google Scholar] [CrossRef]
- Al-Sharif, A.A.; Pradhan, B.; Hadi, S.J.; Mola, N. Revisiting methods and potentials of sar change detection. In Proceedings of the World Congress on Engineering, London, UK, 3–5 July 2013. [Google Scholar]
- Li, H.-C.; Celik, T.; Longbotham, N.; Emery, W.J. Gabor Feature Based Unsupervised Change Detection of Multitemporal SAR Images Based on Two-Level Clustering. IEEE Geosci. Remote. Sens. Lett. 2015, 12, 2458–2462. [Google Scholar]
- Borghys, D.; Shimoni, M.; Perneel, C. Change detection in urban scenes by fusion of SAR and hyperspectral data. Remote Sens. 2007, 6749. [Google Scholar] [CrossRef]
- Dewan, A.M.; Yamaguchi, Y. Land use and land cover change in Greater Dhaka, Bangladesh: Using remote sensing to promote sustainable urbanization. Appl. Geogr. 2009, 29, 390–401. [Google Scholar] [CrossRef]
- Dekker, R.J. SAR change detection techniques and applications. In Proceedings of the 25th EARSeL Symposium on Global Developments in Environmental Earth Observation from Space, Porto, Portugal, 6–11 June 2005. [Google Scholar]
- Hu, H.; Ban, Y. Urban land-cover mapping and change detection with radarsat sar data using neural network and rule-based classifiers. In Proceedings of the XXI Congress of International Society for Photogrammetry and Remote Sensing (ISPRA), Beijing, China, 3–11 July 2008; pp. 1549–1553. [Google Scholar]
- Sanli, F.B.; Kurucu, Y.; Esetlili, M.T. Determining land use changes by radar-optic fused images and monitoring its environmental impacts in Edremit region of western Turkey. Environ. Monit. Assess. 2009, 151, 45–58. [Google Scholar] [CrossRef] [PubMed]
- Longbotham, N.; Pacifici, F.; Glenn, T.; Zare, A.; Christophe, E.; Volpi, M.; Tuia, D.; Michel, J.; Inglada, J.; Chanussot, J.; et al. Multi-Modal Change Detection, Application to the Detection of Flooded Areas: Outcome of the 2009–2010 Data Fusion Contest. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2012, 5, 331–342. [Google Scholar] [CrossRef]
- Mishra, B.; Susaki, J. Optical and SAR data integration for automatic change pattern detection. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2014, II-7, 39–46. [Google Scholar] [CrossRef]
- Du, P.; Liu, S.; Xia, J.; Zhao, Y. Information fusion techniques for change detection from multi-temporal remote sensing images. Inf. Fusion 2013, 14, 19–27. [Google Scholar] [CrossRef]
- Hu, Q.; Wu, W.; Xia, T.; Yu, Q.; Yang, P.; Li, Z.; Song, Q. Exploring the use of Google Earth imagery and object-based methods in land use/cover mapping. Remote Sens. 2013, 5, 6026–6042. [Google Scholar] [CrossRef]
- Ji, C.; Liu, Q.; Sun, D.; Wang, S.; Lin, P.; Li, X. Monitoring urban expansion with remote sensing in China. Int. J. Remote Sens. 2001, 22, 1441–1455. [Google Scholar] [CrossRef]
- Taubenböck, H.; Wegmann, M.; Roth, A.; Mehl, H.M.; Dech, S. Analysis of urban sprawl at mega city Cairo, Egypt using multisensoral remote sensing data, landscape metrics and gradient analysis. In Proceedings of the International Symposium on Remote Sensing of Environment (ISRSE), Stresa, Italy, 4–8 May2009. [Google Scholar]
- Amarsaikhan, D.; Ganzorig, M.; Ache, P.; Blotevogel, H. The integrated use of optical and InSAR data for urban land-cover mapping. Int. J. Remote Sens. 2007, 28, 1161–1171. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Dataset | Acquisition Date (Before Changes) | Acquisition Date (After Changes) | Band | Spatial Resolution (m) |
|---|---|---|---|---|
| QuickBird | 06.06.2010 | 12.03.2017 | R, G, B | 0.75 × 0.6 |
| UAVSAR | 23.04.2010 | 03.04.2017 | L-band (fully polarimetric) | 6.2 × 6.2 (GRD) |
| Methods | Overall Accuracy | Kappa |
|---|---|---|
| Post-Classification—OBSVM | 67.48% | 0.4409 |
| Post-Classification—PBSVM | 80.59% | 0.6767 |
| PCA—band2 | 71.91% | 0.5216 |
| Image Differencing—band1 | 70.44% | 0.4839 |
| Image Differencing—band2 | 71.01% | 0.5285 |
| Image Differencing—band3 | 76.68% | 0.6183 |
| Methods | Overall Accuracy | Kappa |
|---|---|---|
| Post-Classification—SVM | 70.02% | 0.4727 |
| PCA—band2 | 71.73% | 0.5184 |
| Image Differencing—band 1 | 70.96% | 0.4903 |
| Image Differencing—band 2 | 70.72% | 0.4736 |
| Image Differencing—band 3 | 70.46% | 0.4745 |
| Methods | Overall Accuracy | Kappa |
|---|---|---|
| Optic–Post-Classification–PB | 80.59% | 0.6767 |
| PolSAR–Post-Classification | 70.02% | 0.4727 |
| Majority Voting—All | 88.18% | 0.7792 |
| Majority Voting—Optic | 80.56% | 0.6581 |
| Majority Voting—PolSAR | 75.22% | 0.4958 |
| Majority Voting—Best | 88.61% | 0.7829 |
| Majority Voting—Best Improvement | 89.81% | 0.8049 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qamsary, S.S.; Arefi, H.; Shah-Hosseini, R. Fusion of UAVSAR and Quickbird Data for Urban Growth Detection. Proceedings 2019, 18, 13. https://doi.org/10.3390/ECRS-3-06186
Qamsary SS, Arefi H, Shah-Hosseini R. Fusion of UAVSAR and Quickbird Data for Urban Growth Detection. Proceedings. 2019; 18(1):13. https://doi.org/10.3390/ECRS-3-06186
Chicago/Turabian StyleQamsary, Sona Salehiyan, Hossein Arefi, and Reza Shah-Hosseini. 2019. "Fusion of UAVSAR and Quickbird Data for Urban Growth Detection" Proceedings 18, no. 1: 13. https://doi.org/10.3390/ECRS-3-06186
APA StyleQamsary, S. S., Arefi, H., & Shah-Hosseini, R. (2019). Fusion of UAVSAR and Quickbird Data for Urban Growth Detection. Proceedings, 18(1), 13. https://doi.org/10.3390/ECRS-3-06186