Automatic Task Selection from Targets Recognition for Swarm Mobile Robots with Specialized Agents †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
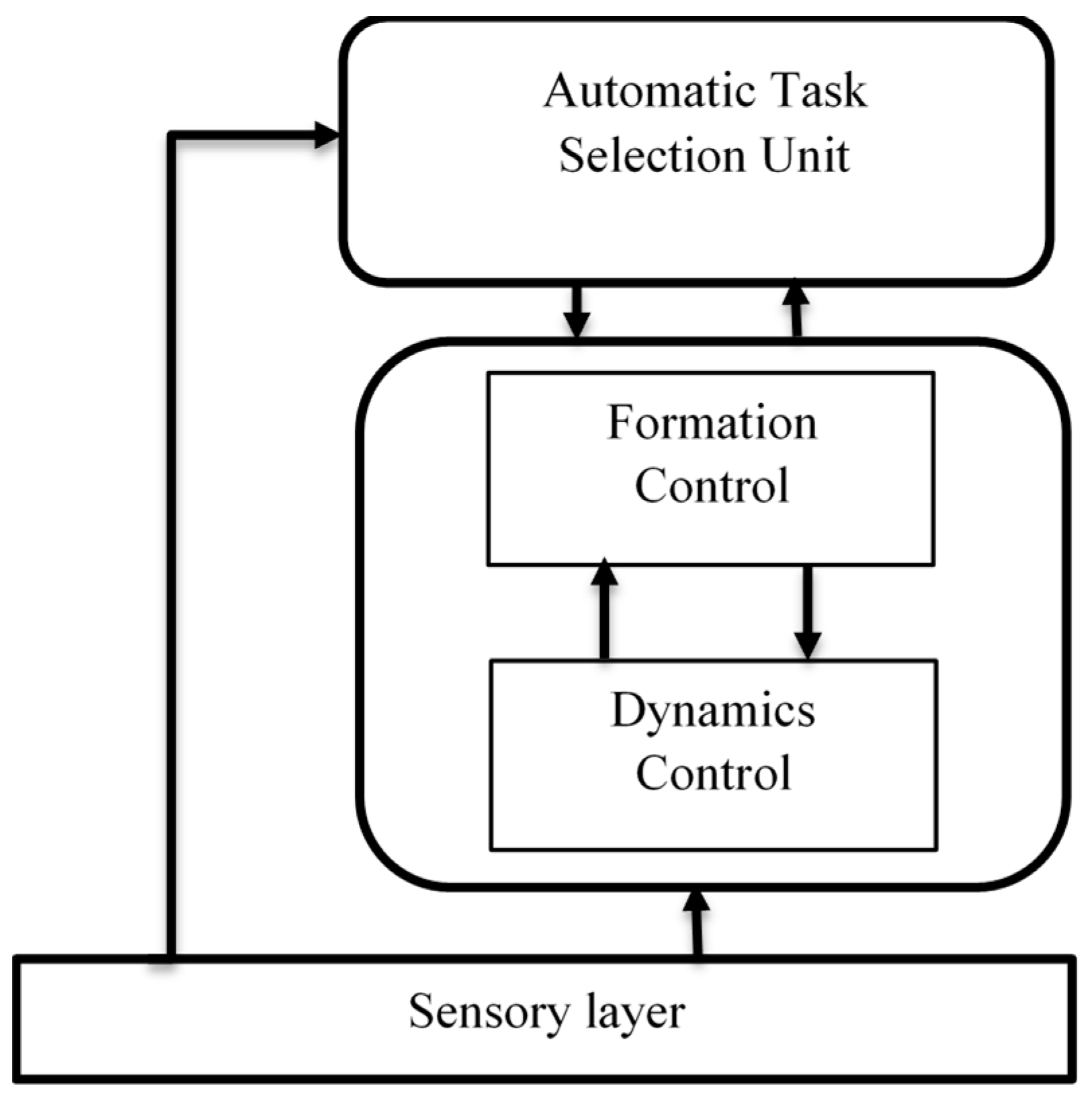
2. Overall Proposed Framework
3. Operation Modes and Phases
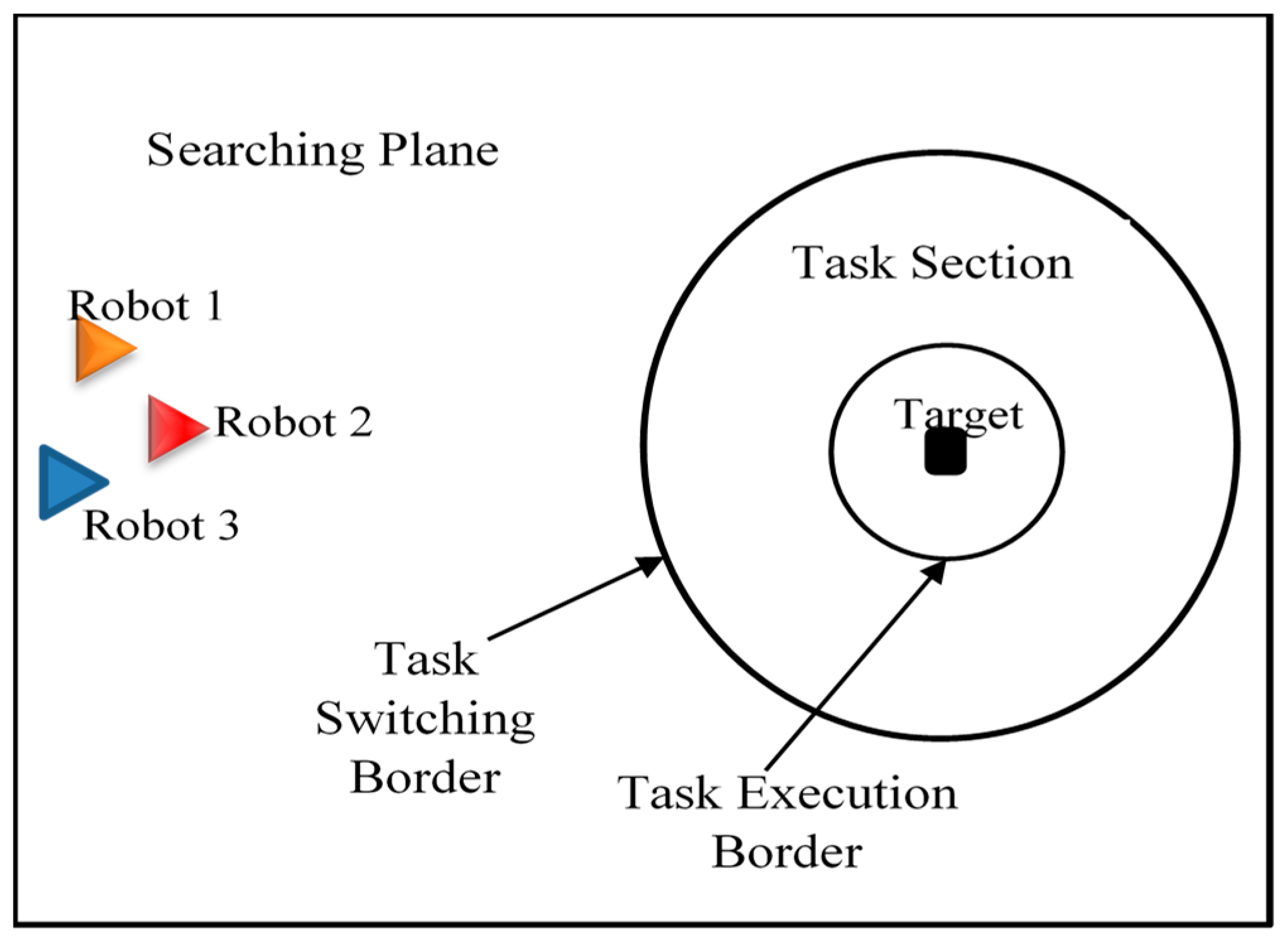
3.1. Search Phase
3.2. Task Phase
| Algorithm 1: Automatic Task Selection Unit method to select appropriate leader robot |
Then Enable Switching to the Task Phase. else exit Select the suitable agent to perform the current task Assign the selected robot to be the new leader Step 3: Assign the new group leader as the reference: |
3.3. Execution Phase
4. Overlapping Zones of Influence and Dynamic Targets
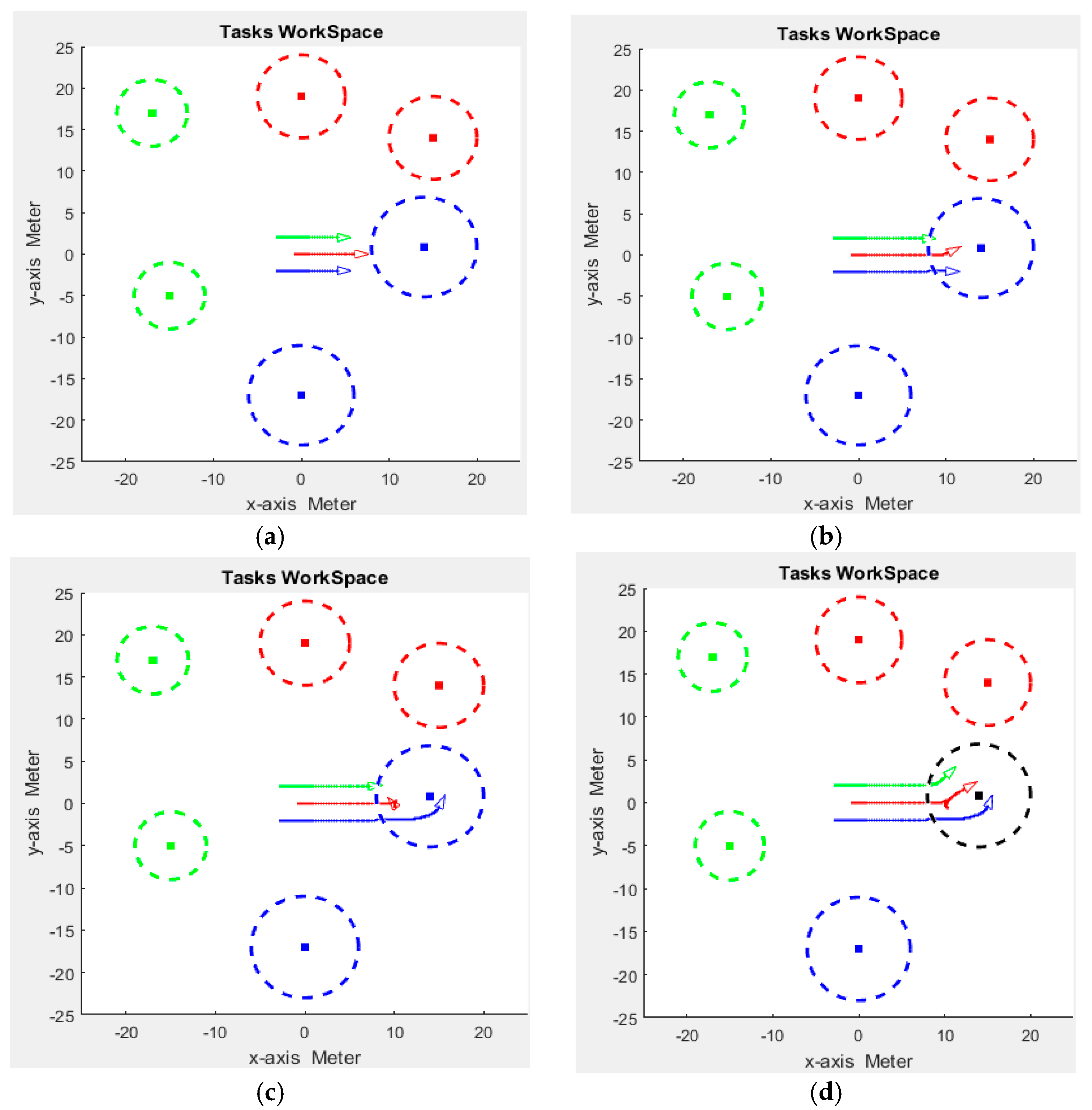
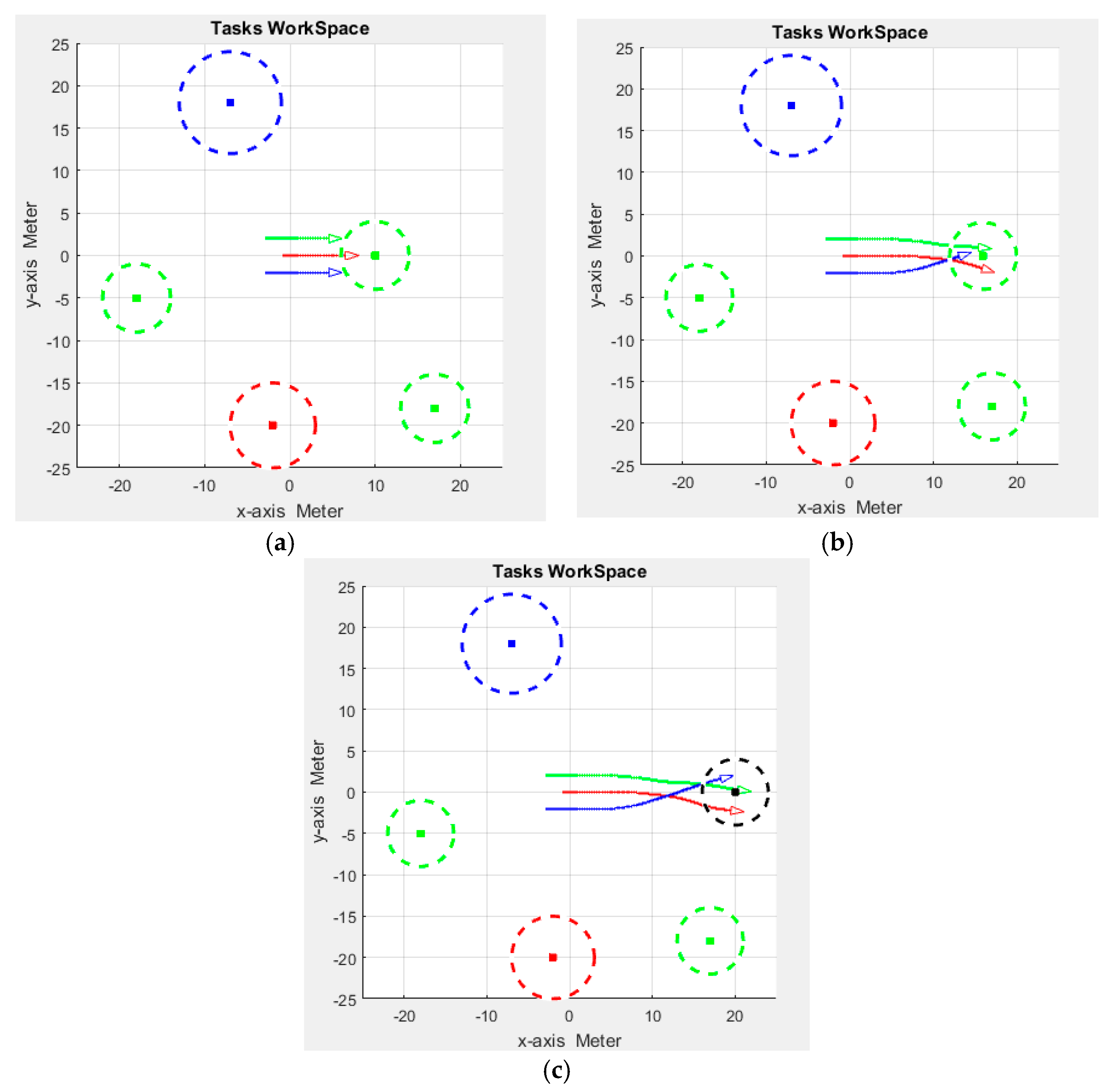
5. Simulation Results

6. Conclusions
Authors Contributions
Acknowledgments
Conflicts of Interest
References
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- Soysal, O.; Şahin, E. A macroscopic model for self-organized aggregation in swarm robotic systems. In International Workshop on Swarm Robotics; Springer: Berlin/Heidelberg, Germany, 2006; pp. 27–42. [Google Scholar]
- Shucker, B.; Bennett, J.K. Scalable control of distributed robotic macrosensors. In Distributed Autonomous Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2007; Volume 6, pp. 379–388. [Google Scholar]
- Hettiarachchi, S.; Maxim, P.M.; Spears, W.M.; Spears, D.F. Connectivity of collaborative robots in partially observable domains. In Proceedings of the International Conference on Control, Automation and Systems, Seoul, Korea, 14–17 October 2008; pp. 14–17. [Google Scholar]
- O’Grady, R.; Christensen, A.L.; Dorigo, M. SWARMORPH: Multi-robot morphogenesis using directional self-assembly. IEEE Trans. Robot. 2009, 3, 738–743. [Google Scholar] [CrossRef]
- Beckers, R.; Holland, O.E.; Deneubourg, J.-L. From local actions to global tasks: Stigmergy and collective robotics. In Artificial life IV, Proceedings of the Fourth International Worksop on the Synthesis and Simulation of Living Systems, Cambridge, MA, USA, 6–8 July 1994; MIT Press: Cambridge, MA, USA, 1994; Volume 181, pp. 181–189. [Google Scholar]
- Wawerla, J.; Sukhatme, G.S.; Mataric, M.J. Collective construction with multiple robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 3, pp. 2696–2701. [Google Scholar]
- Payton, D.; Regina, E.; Mike, H. Pheromone robotics and the logic of virtual pheromones. In International Workshop on Swarm Robotics; Springer: Berlin/Heidelberg, Germany, 2004; pp. 45–57. [Google Scholar]
- Howard, A.; Mataric, M.J.; Sukhatme, G. Mobile sensor network deployment using potential fields: A distributed, scalable solution to the area coverage problem. In Proceedings of the 6th International Symposium on Distributed Autonomous Robotic Systems, Fukuoka, Japan, 25–27 June 2002; pp. 299–308. [Google Scholar]
- Sabattini, L.; Secchi, C.; Fantuzzi, C. Arbitrarily shaped formations of mobile robots: Artificial potential fields and coordinate transformation. Auton. Robots 30 2011, 4, 385–397. [Google Scholar] [CrossRef]
- Balch, T.; Hybinette, M. Social potentials for scalable multi-robot formations. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 73–80. [Google Scholar]
- Baldassarre, G.; Nolfi, S.; Parisi, D. Evolving mobile robots able to display collective behaviors. Artif. Life 2003, 9, 255–267. [Google Scholar] [CrossRef] [PubMed]
- Al-Buraiki, O.; El Ferik, S. Neuro-adaptive Formation Maintenance and Control of Nonholonomic Mobile Robots. In Proceedings of the International Conference of Control, Dynamic Systems, and Robotics, Ottawa, ON, Canada, 15–16 May 2014; pp. 1–10. [Google Scholar]
- Al-Buraiki, O.; Payeur, P.; Castillo, Y.R. Task switching for specialized mobile robots working in cooperative formation. In Proceedings of the IEEE International Symposium on Robotics and Intelligent Sensors, Tokyo, Japan, 17–20 December 2016; pp. 207–212. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Buraiki, O.; Payeur, P.; Busiquia, H.M. Automatic Task Selection from Targets Recognition for Swarm Mobile Robots with Specialized Agents. Proceedings 2018, 2, 116. https://doi.org/10.3390/ecsa-4-04911
Al-Buraiki O, Payeur P, Busiquia HM. Automatic Task Selection from Targets Recognition for Swarm Mobile Robots with Specialized Agents. Proceedings. 2018; 2(3):116. https://doi.org/10.3390/ecsa-4-04911
Chicago/Turabian StyleAl-Buraiki, Omar, Pierre Payeur, and Henrique Morales Busiquia. 2018. "Automatic Task Selection from Targets Recognition for Swarm Mobile Robots with Specialized Agents" Proceedings 2, no. 3: 116. https://doi.org/10.3390/ecsa-4-04911