Dynamic Simulation of a UAV Moving on Launcher †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology
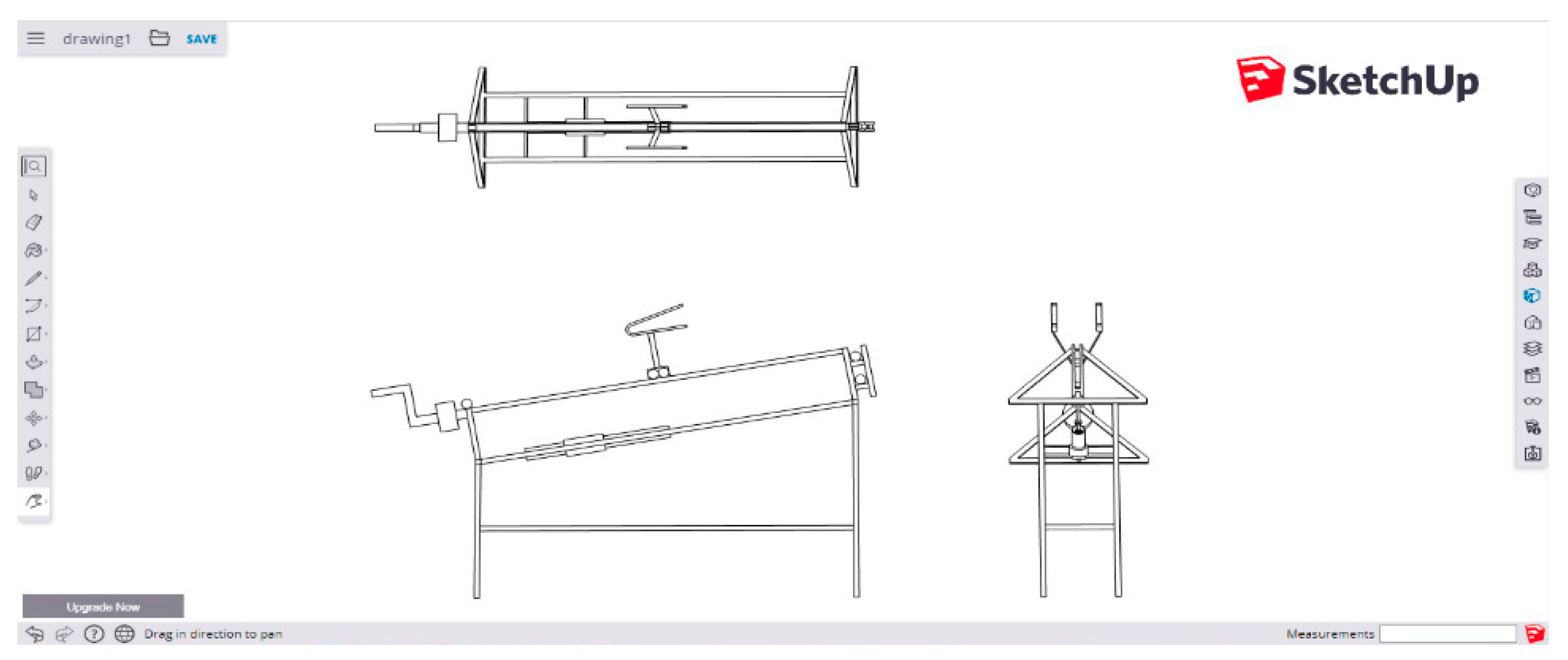
2.1. Spring Drive UAV Launcher
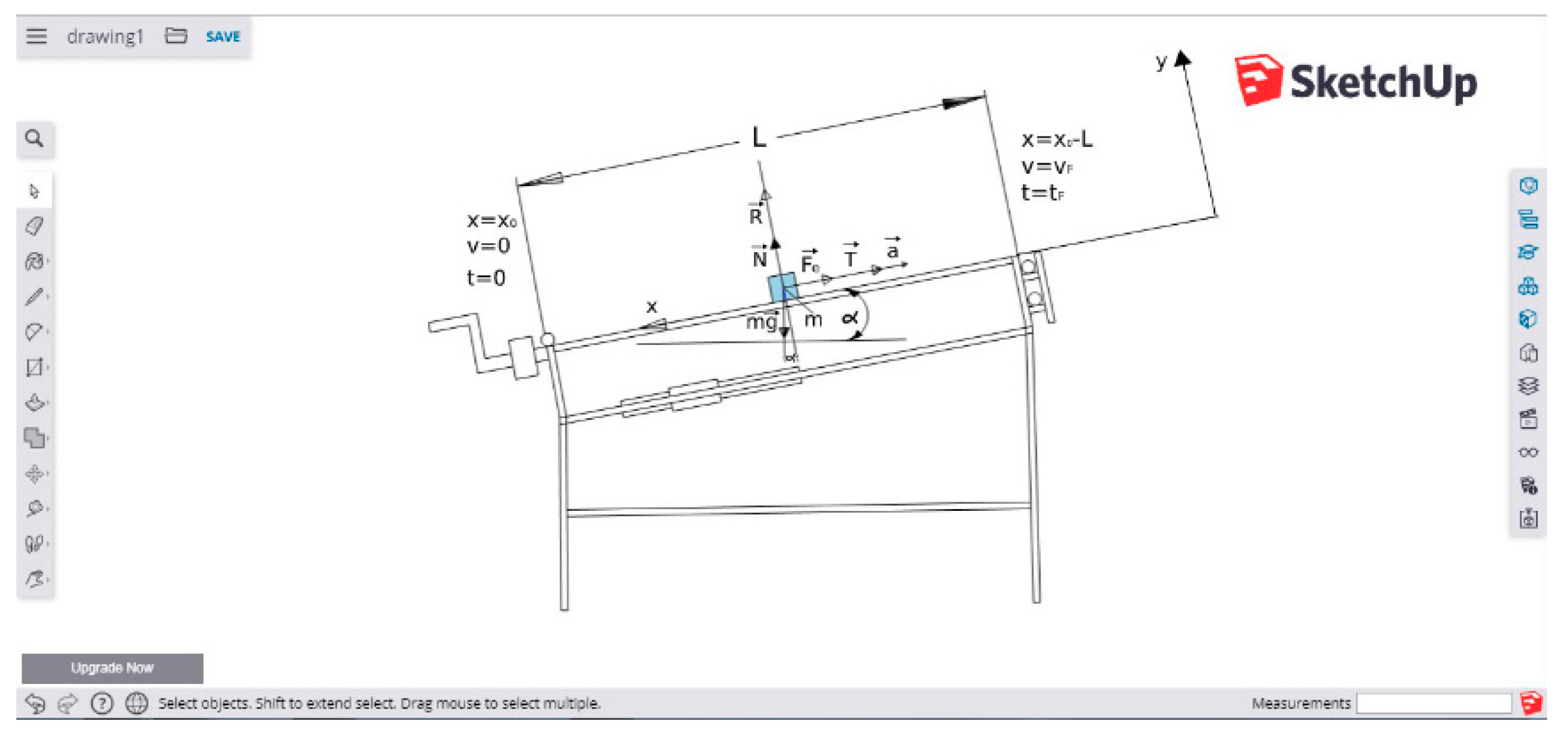
2.2. Mathematical Model
- Assumption 1
- Assumption 2
- Assumption 3
3. Results and Discussion
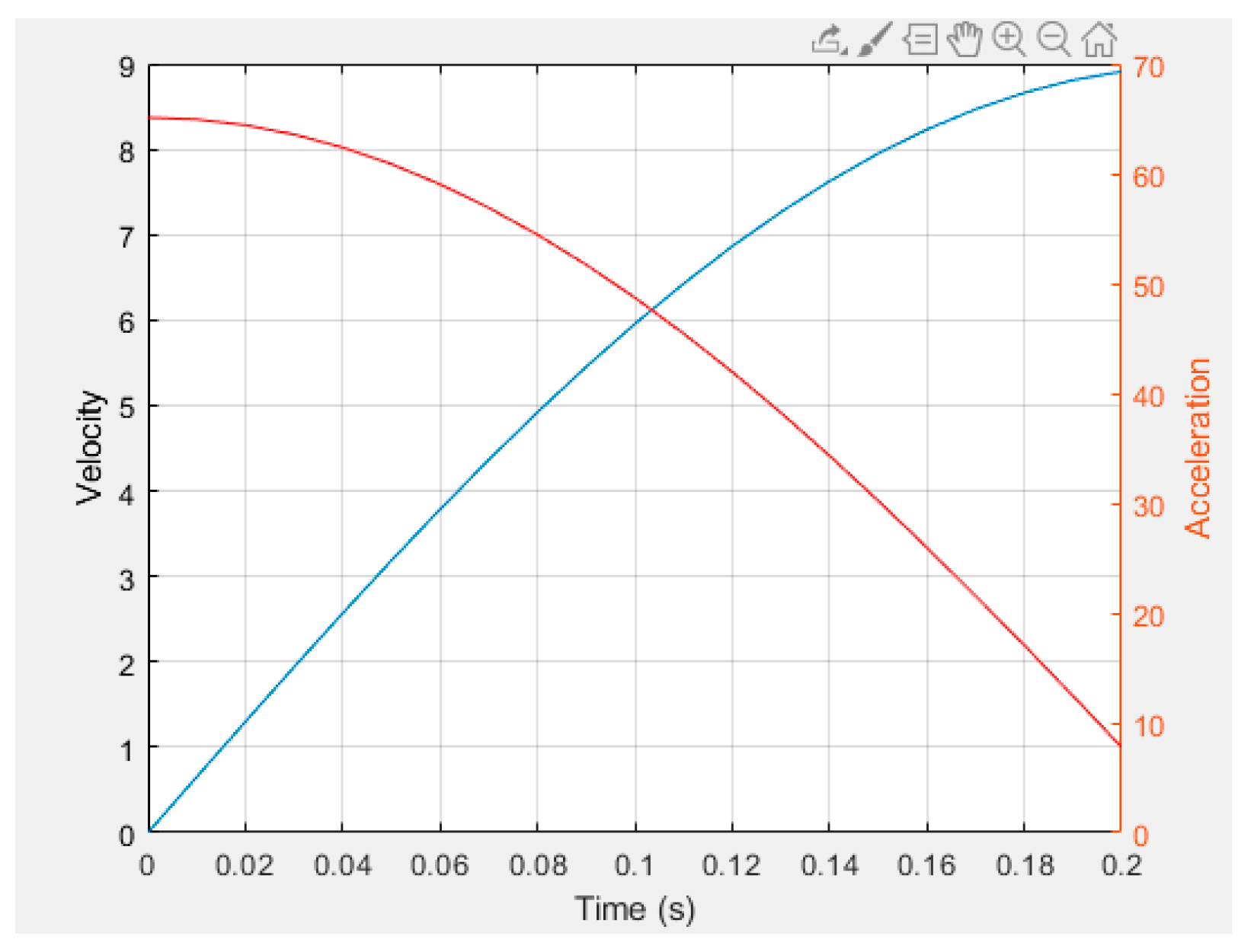
Numerical Results
- Wingspan = 1.4 m
- Length of fuselage = 0.9 m
- Wing area = 0.42 m2
- Mass = 1.9 kg
4. Conclusions
References
- Powerful Pulleys—Lesson. TeachEngineering.org, 30 June 2019. Available online: https://www.teachengineering.org/lessons/view/cub_simple_lesson05 (accessed on 23 November 2019).
- What Is Hooke’s Law? In Khan Academy; Mountain View, CA, USA. Available online: https://www.khanacademy.org/ (accessed on 23 November 2019).
- Available online: science/physics/work-and-energy/hookes-law/a/what-is-hookes-law (accessed on 23 November 2019).
- Law of Conservation of Energy. Law of Conservation of Energy—Energy Education. Available online: https://energyeducation.ca/encyclopedia/Law_of_conservation_of_energy (accessed on 23 November 2019).
- OpenStaxCollege. College Physics, 23 January 2012. Available online: https://opentextbc.ca/physicstestbook2/chapter/conservation-of-energy/ (accessed on 23 November 2019).

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Homsup, W.; Pinyochon, J.; Narathee, P.; Weng, S.; Homsup, N. Dynamic Simulation of a UAV Moving on Launcher. Proceedings 2019, 39, 26. https://doi.org/10.3390/proceedings2019039026
Homsup W, Pinyochon J, Narathee P, Weng S, Homsup N. Dynamic Simulation of a UAV Moving on Launcher. Proceedings. 2019; 39(1):26. https://doi.org/10.3390/proceedings2019039026
Chicago/Turabian StyleHomsup, Wiroj, Jeadsada Pinyochon, Pitikorn Narathee, Supita Weng, and Nuttaka Homsup. 2019. "Dynamic Simulation of a UAV Moving on Launcher" Proceedings 39, no. 1: 26. https://doi.org/10.3390/proceedings2019039026
APA StyleHomsup, W., Pinyochon, J., Narathee, P., Weng, S., & Homsup, N. (2019). Dynamic Simulation of a UAV Moving on Launcher. Proceedings, 39(1), 26. https://doi.org/10.3390/proceedings2019039026