PI Tuning of a Multivariable Activated Sludge Process with Nitrification and Denitrification with Multi-Objective Optimization †


{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Results
3. Discussion
4. Materials and Methods
4.1. Multi-Objective Optimization Design
- Multi-objective optimization problem: design objectives are stated, as well as decision variables. In this case, decision variables are the tuning parameters of a given controller. Design objectives are related to the expected performance of the control loop.
- Multi-objective optimization process: that is, approximating the Pareto front. For this purpose, the sp-MODEx algorithm (Supplementary Materials) is used due to its performance for controller tuning applications [7].
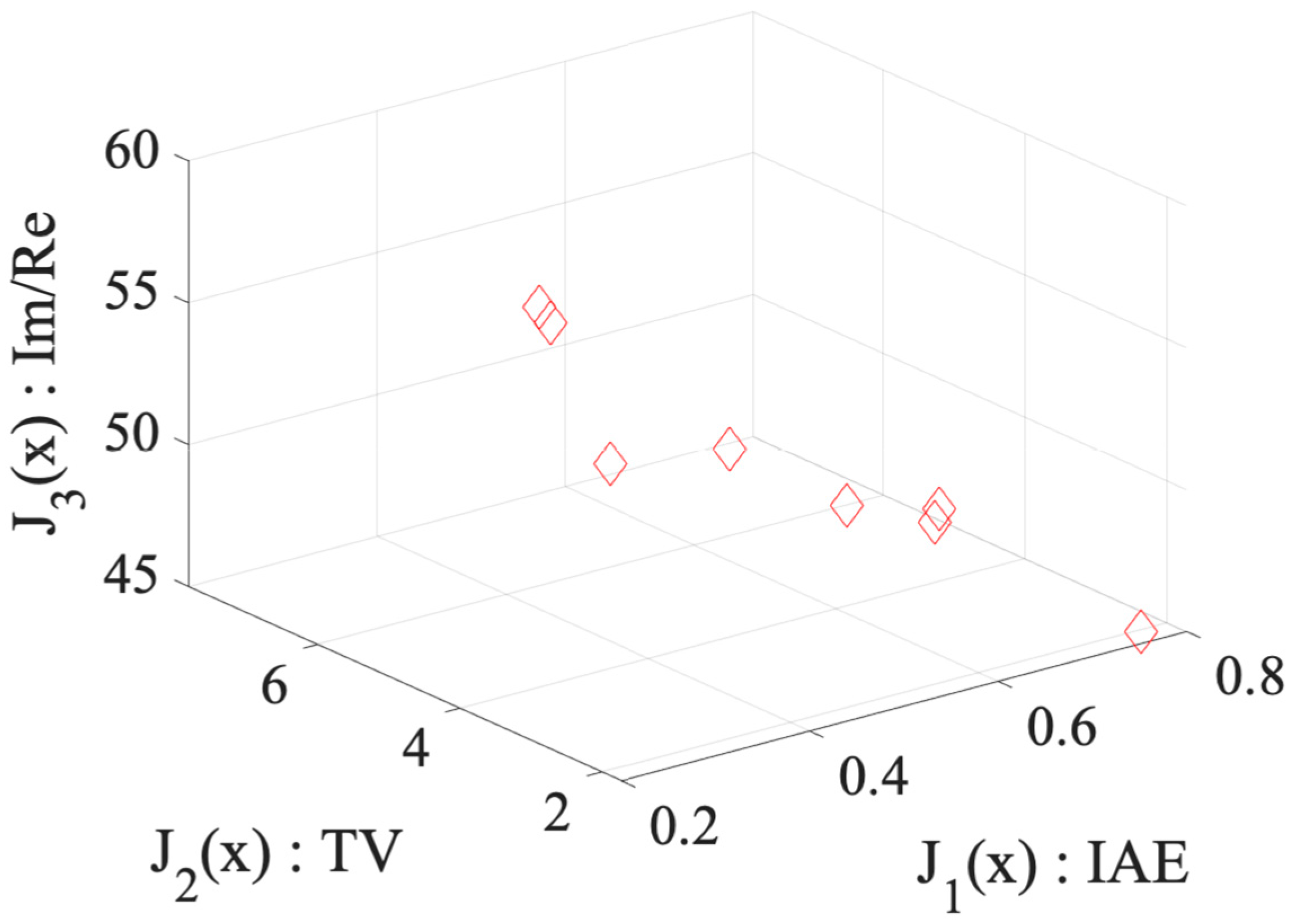
- Multi-criteria decision-making stage: a given solution is selected, after an analysis of the approximated Pareto front. For this purpose, a simple 3D plot is used.
4.2. Process Description
4.3. Multiobjective Problem Statement
5. Conclusions
Supplementary Materials
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| MOO | Multi-objective optimization |
| MOP | Muti-objective problem |
| MCDM | Multi-criteria decision making |
| MOOD | Multi-objective optimization design |
References
- Wahab, N.A.; Katebi, R.; Balderud, J. Multivariable PID control design for activated sludge process with nitrification and denitrification. Biochem. Eng. J. 2009, 45, 239–248. [Google Scholar] [CrossRef]
- Reynoso-Meza, G.; Alves Ribeiro, V.; Carreño-Alvarado, E. A comparison of preference handling techniques in multi-objective optimisation for water distribution systems. Water 2017, 9, 996. [Google Scholar] [CrossRef]
- Kaiser, M.J.; Miettinen, K.M. Nonlinear Multiobjective Optimization; Springer: Berlin, Germany, 2001. [Google Scholar]
- Reynoso-Meza, G.; Blasco, X.; Sanchis, J.; Martínez, M. Controller tuning using evolutionary multi-objective optimisation: current trends and applications. Control Eng. Pract. 2014, 28, 58–73. [Google Scholar] [CrossRef]
- Meza, G.R.; Ferragud, X.B.; Saez, J.S.; Durá, J.M.H. Controller Tuning with Evolutionary Multiobjective Optimization: A Holistic Multiobjective Optimization Design Procedure; Springer: Berlin, Germany, 2016; Volume 85. [Google Scholar]
- Reynoso-Meza, G.; Garcia-Nieto, S.; Sanchis, J.; Blasco, F.X. Controller tuning by means of multi-objective optimization algorithms: A global tuning framework. IEEE Trans. Control Syst. Technol. 2012, 21, 445–458. [Google Scholar] [CrossRef]
- Reynoso-Meza, G.; Sanchis, J.; Blasco, X.; Martínez, M. Preference driven multi-objective optimization design procedure for industrial controller tuning. Inf. Sci. 2016, 339, 108–131. [Google Scholar] [CrossRef]
- Messac, A. Physical programming-effective optimization for computational design. AIAA J. 1996, 34, 149–158. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reynoso-Meza, G.; Carreño-Alvarado, E.P. PI Tuning of a Multivariable Activated Sludge Process with Nitrification and Denitrification with Multi-Objective Optimization. Proceedings 2020, 48, 4. https://doi.org/10.3390/ECWS-4-06434
Reynoso-Meza G, Carreño-Alvarado EP. PI Tuning of a Multivariable Activated Sludge Process with Nitrification and Denitrification with Multi-Objective Optimization. Proceedings. 2020; 48(1):4. https://doi.org/10.3390/ECWS-4-06434
Chicago/Turabian StyleReynoso-Meza, Gilberto, and Elizabeth Pauline Carreño-Alvarado. 2020. "PI Tuning of a Multivariable Activated Sludge Process with Nitrification and Denitrification with Multi-Objective Optimization" Proceedings 48, no. 1: 4. https://doi.org/10.3390/ECWS-4-06434
APA StyleReynoso-Meza, G., & Carreño-Alvarado, E. P. (2020). PI Tuning of a Multivariable Activated Sludge Process with Nitrification and Denitrification with Multi-Objective Optimization. Proceedings, 48(1), 4. https://doi.org/10.3390/ECWS-4-06434