Comparison of Aerodynamic Properties of Badminton Feather and Synthetic Shuttlecocks †


Abstract
:1. Introduction
2. Experimental Apparatus and Methods
3. Results and Discussion
3.1. Behavior of Each Shuttlecock during Flip Movement and Static Aerodynamic Characteristics
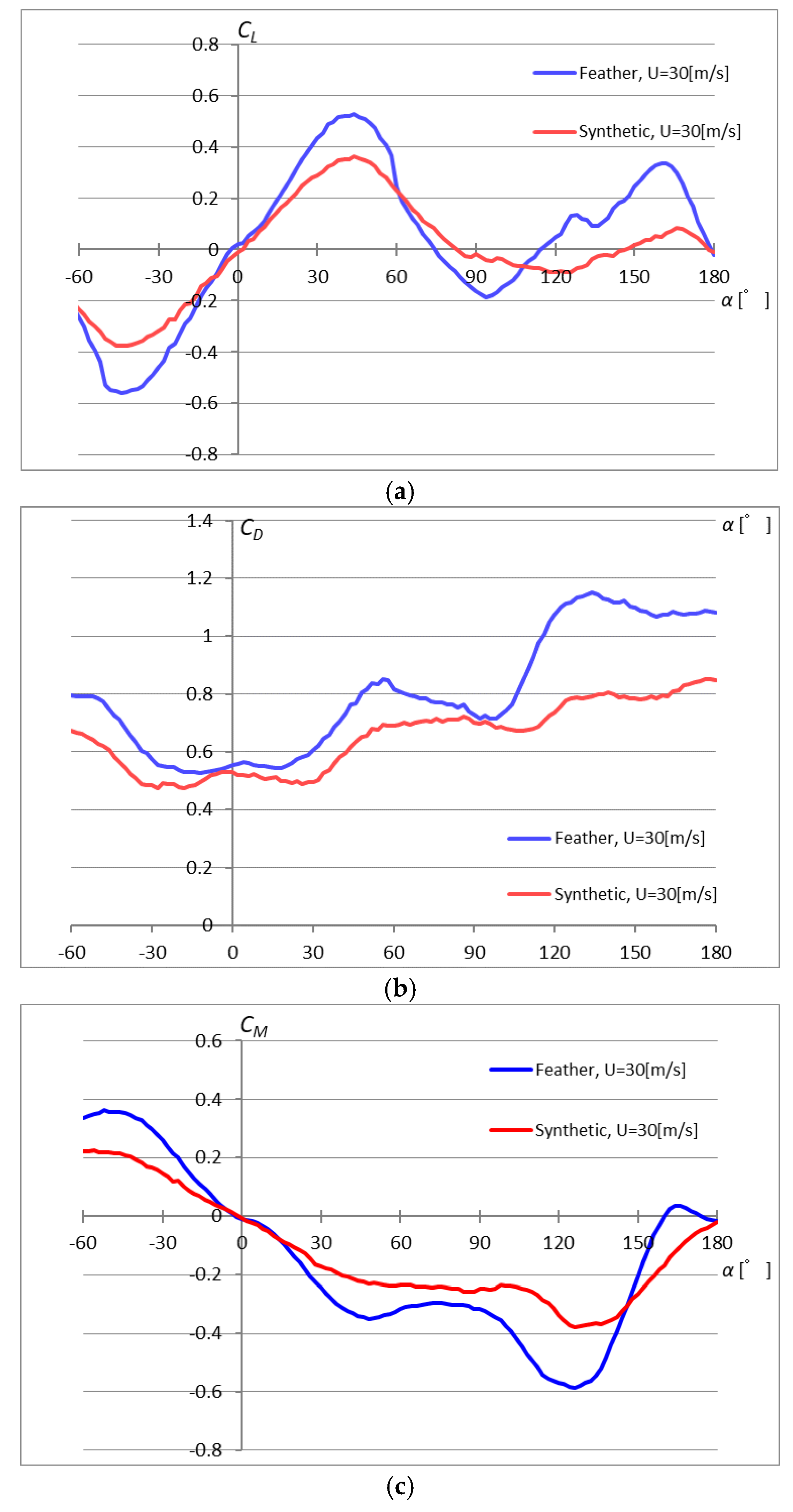
3.2. Comparison of Feather Shuttlecock and Synthetic Shuttlecock in Aerodynamic Characteristics
4. Conclusions
- The oscillating period during the flip movement for the feather shuttlecock is shorter than that for the synthetic shuttlecock;
- The overshoot behavior is suppressed for the standard shuttlecock;
- The turnover stability of a badminton shuttlecock is affected by the existence of air permeability in the shuttlecock skirt.
References
- Hubbard, M.; Alison, J. Cooke, Spin dynamics of the badminton shuttlecock. In Proceedings of VIth International Symposium on Computer Simulation in Biomechanics; Laboratory of Sport Biomechanics, Institute of Health and Sport Sciences, University of Tsukuba: Tsukuba, Japan, 1997; pp. 42–43. [Google Scholar]
- Calvin, S.H.; Lin, C.K.; Chua, J.H. Yeo, Turnover stability of shuttlecocks—Transient angular response and impact deformation of feather and synthetic shuttlecocks. Procedia Eng. 2013, 60, 106–111. [Google Scholar]
- Cohen, C.; Texier, B.D.; Quere, D.; Clanet, C. The physics of badminton. New J. Phys. 2015, 17, 063001. [Google Scholar] [CrossRef]
- Lin, C.; Chua, C.K.; Yeo, J.H. Badminton shuttlecock stability: Modelling and simulating the angular response of the turnover. New J. Phys. Proc. IMechE Part P J. Sports Eng. Technol. 2015, 230, 1–10. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
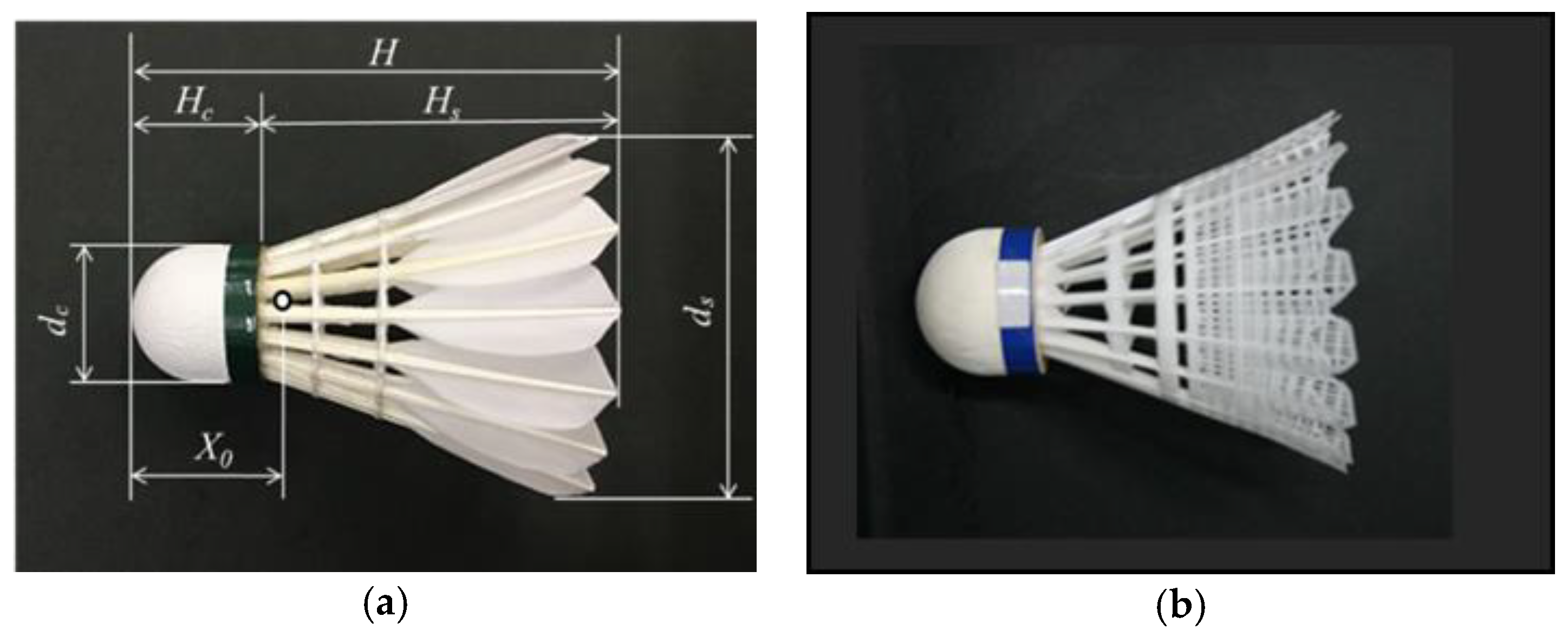
| Shuttle Type | Feather | Synthetic | |
|---|---|---|---|
| The total length [mm] | H | 85.0 | 80.0 |
| Length of shuttle skirt [mm] | Hs | 60.0 | 57.2 |
| Length of cork [mm] | Hc | 25.0 | 22.8 |
| Diameter of skirt [mm] | ds | 66.0 | 66.0 |
| Diameter of cork [mm] | dc | 26.4 | 26.4 |
| Mass [g] | m | 5.3 | 5.3 |
| Distance of center of mass [mm] | X0 | 31.4 | 28.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakagawa, K.; Hasegawa, H.; Murakami, M. Comparison of Aerodynamic Properties of Badminton Feather and Synthetic Shuttlecocks. Proceedings 2020, 49, 104. https://doi.org/10.3390/proceedings2020049104
Nakagawa K, Hasegawa H, Murakami M. Comparison of Aerodynamic Properties of Badminton Feather and Synthetic Shuttlecocks. Proceedings. 2020; 49(1):104. https://doi.org/10.3390/proceedings2020049104
Chicago/Turabian StyleNakagawa, Kenichi, Hiroaki Hasegawa, and Masahide Murakami. 2020. "Comparison of Aerodynamic Properties of Badminton Feather and Synthetic Shuttlecocks" Proceedings 49, no. 1: 104. https://doi.org/10.3390/proceedings2020049104
APA StyleNakagawa, K., Hasegawa, H., & Murakami, M. (2020). Comparison of Aerodynamic Properties of Badminton Feather and Synthetic Shuttlecocks. Proceedings, 49(1), 104. https://doi.org/10.3390/proceedings2020049104