Effect of the Variation in Humidity of the Medium on the GPR Radar Response †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
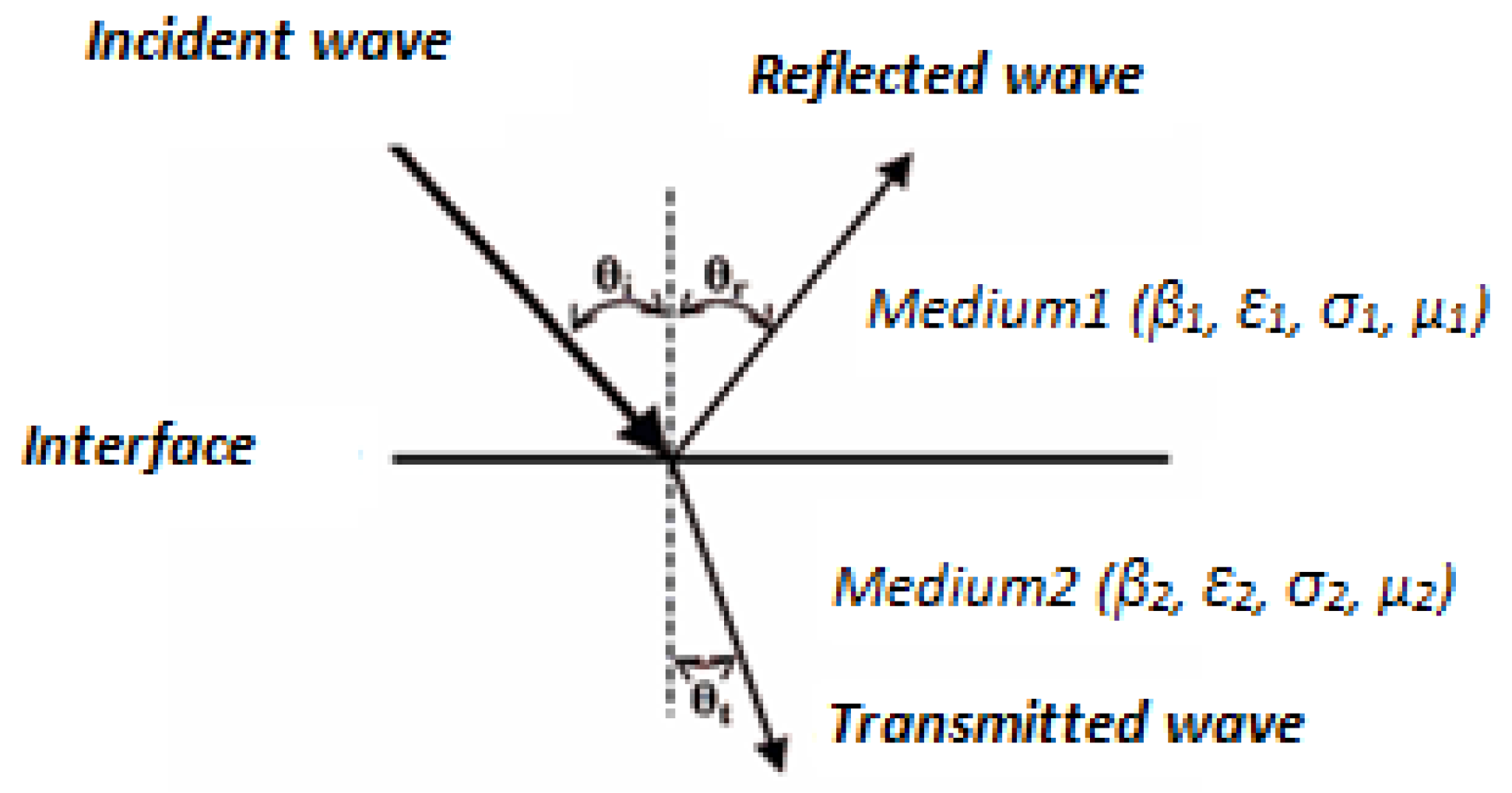
2. Snell–Descartes Laws
3. Methodology
- GPR SIR3000
- Reflexw
- GprMax2d
4. Results and Discussion
4.1. Simulation Results
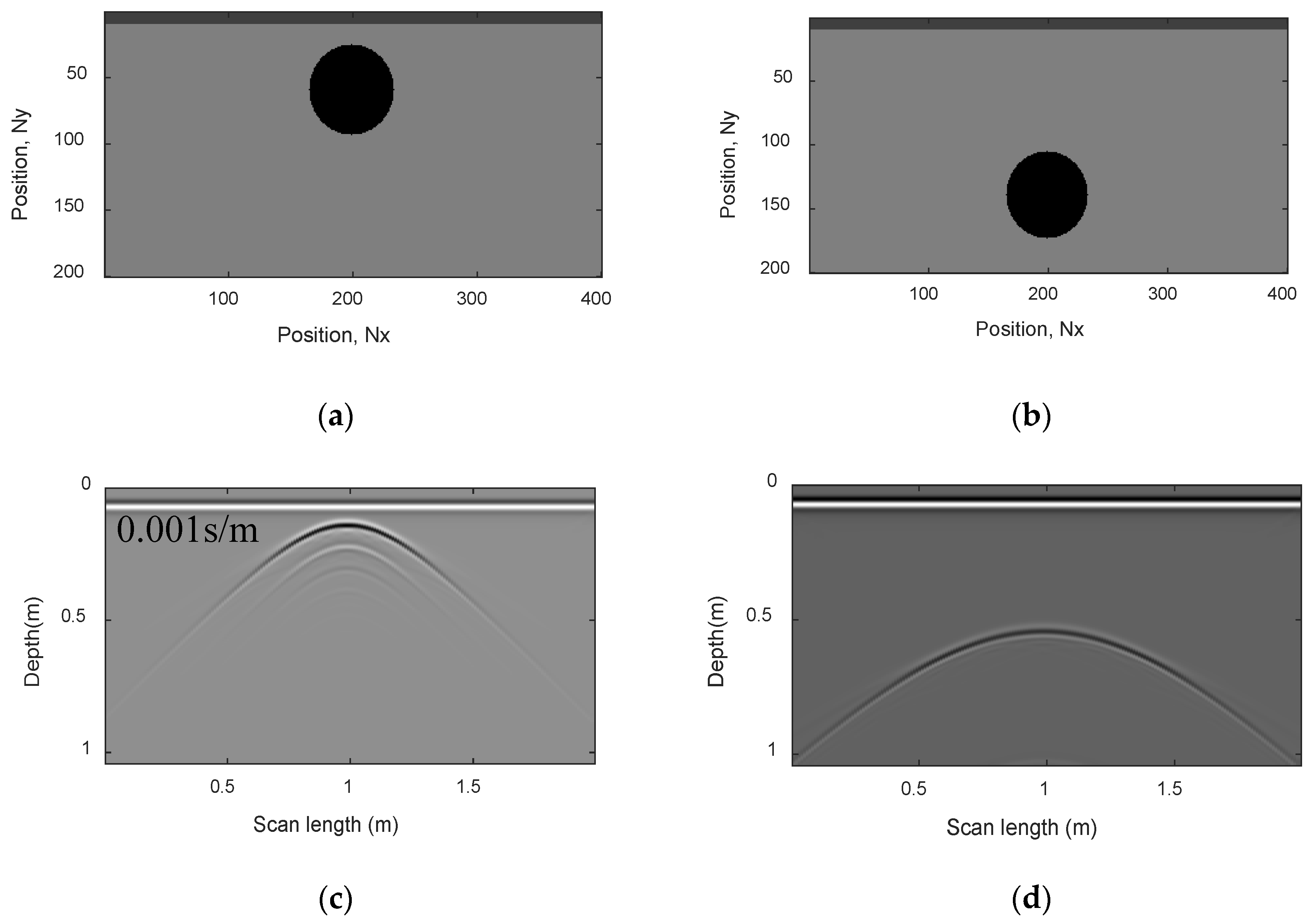
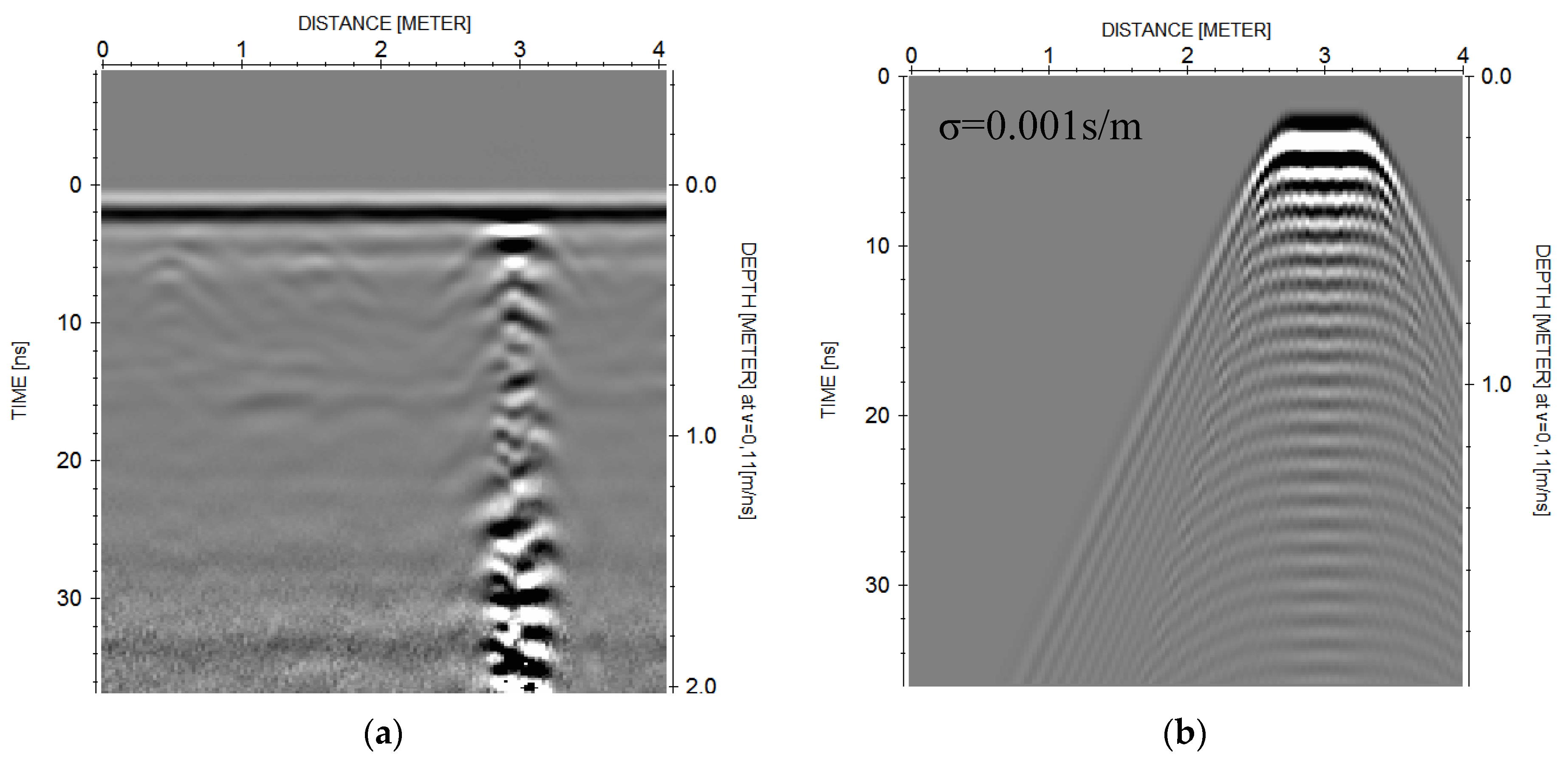
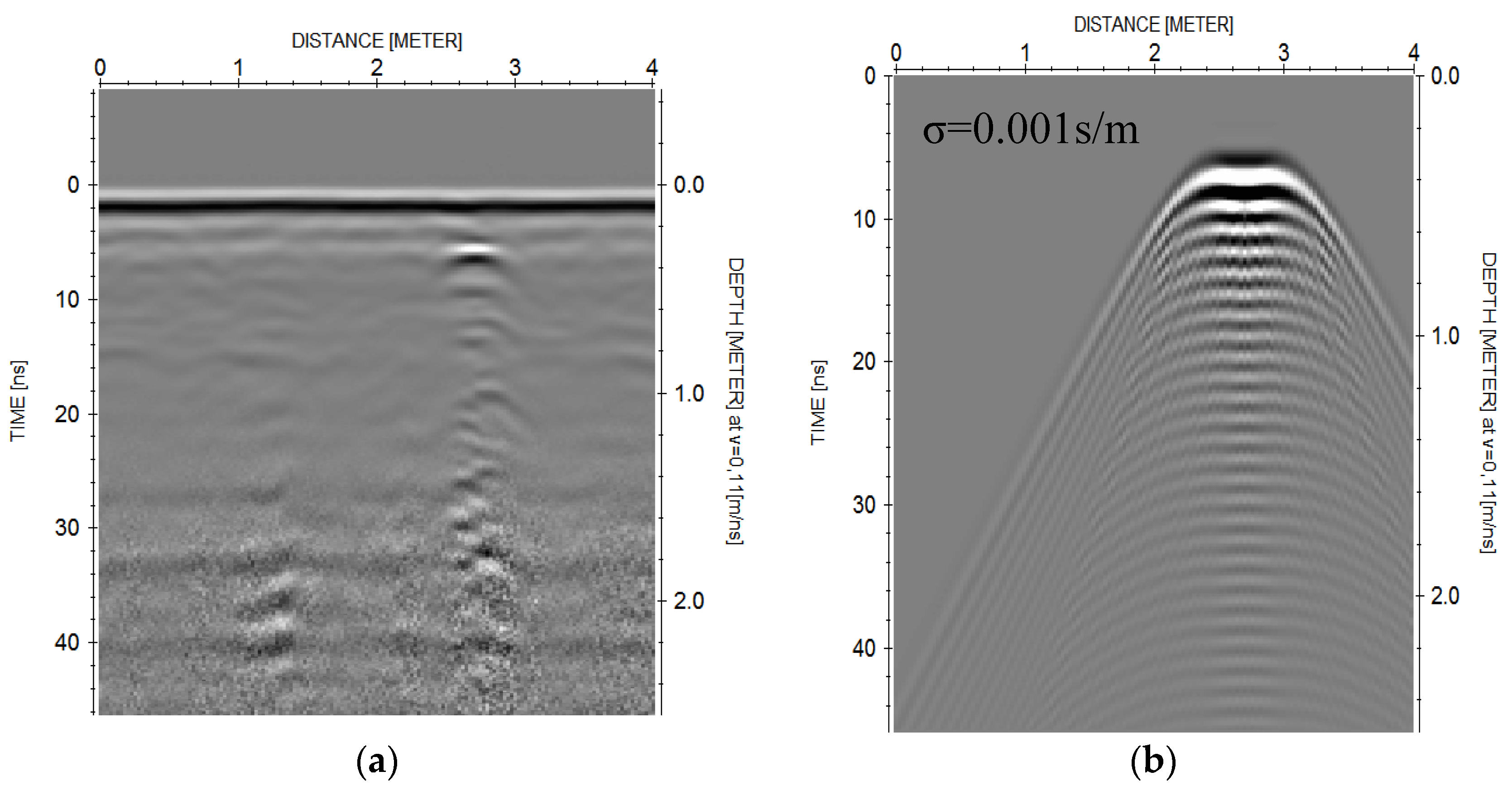
- With a conductivity of 0.001 s/m, the targets are easily detectable by the GPR in the two depths chosen for this study: 0.3 and 0.7 m.
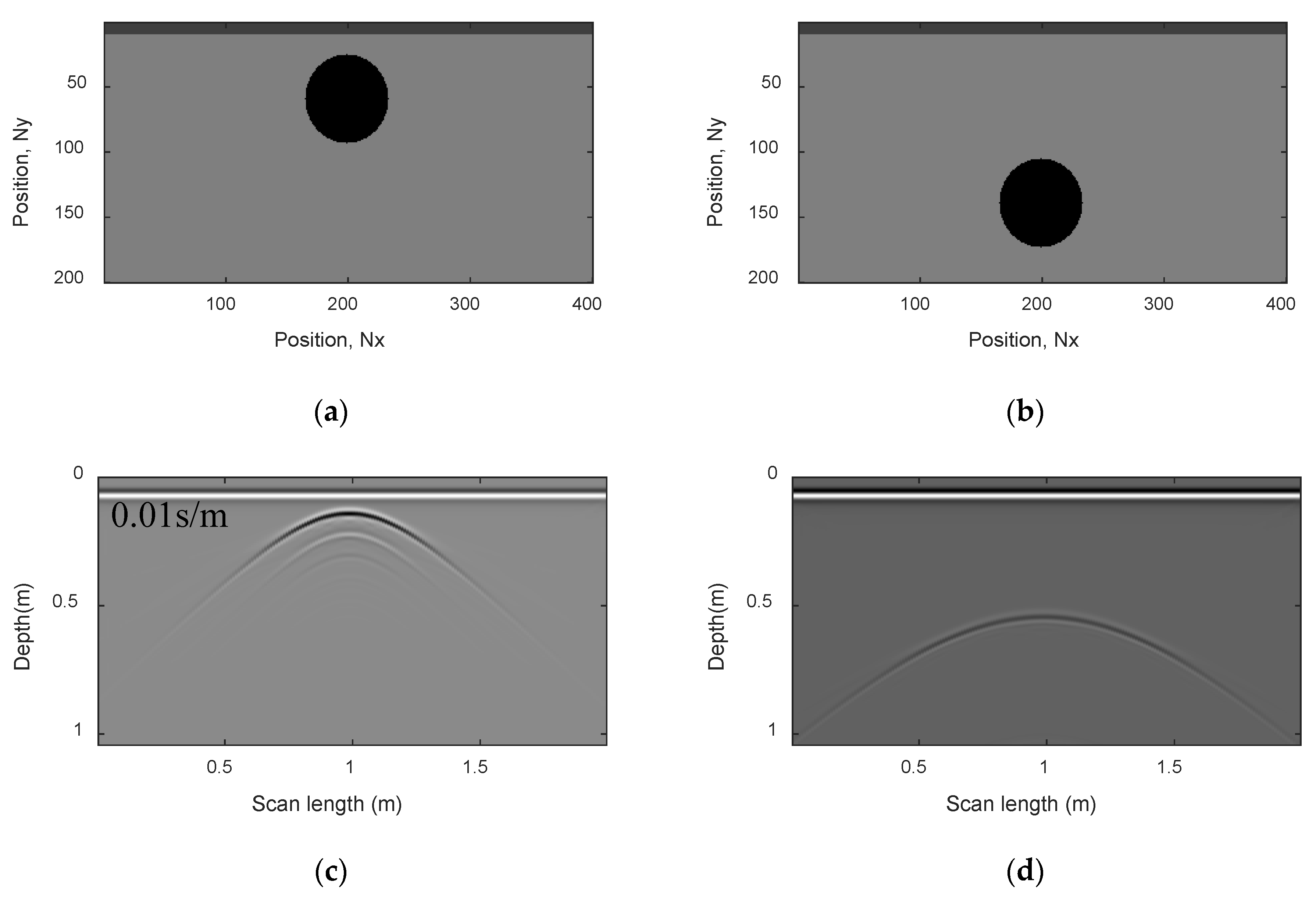
- We also note that with a conductivity of 0.01 s/m, the GPR detects objects but with less visible hyperbolas than for the previous case.
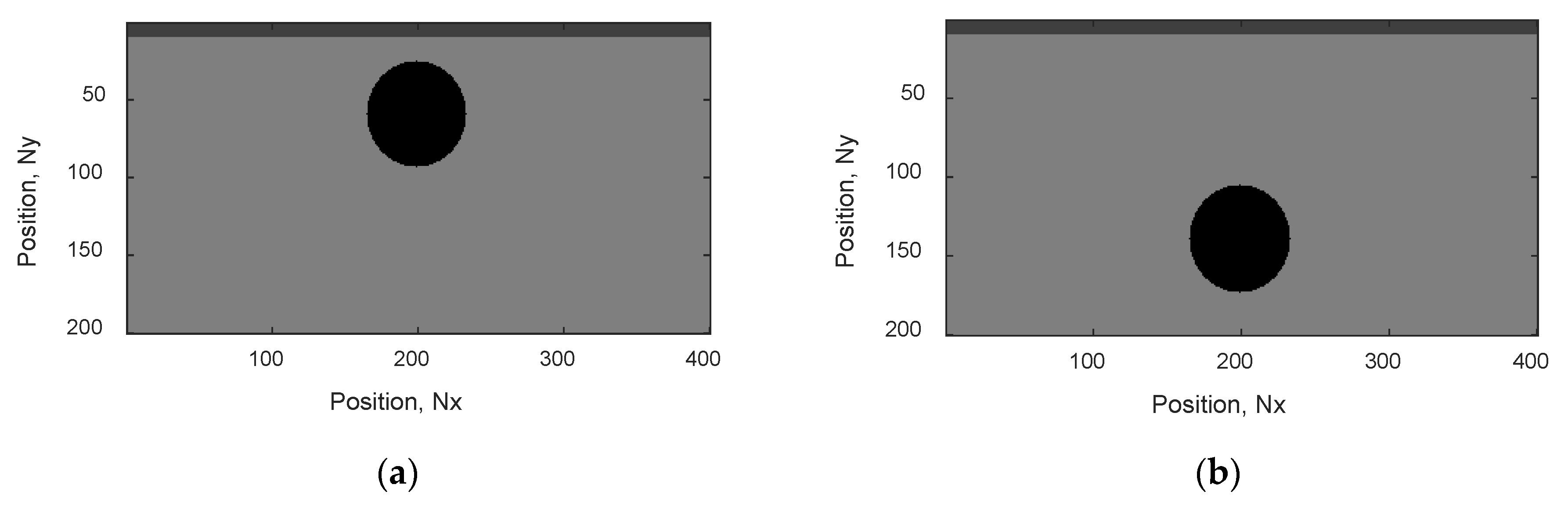
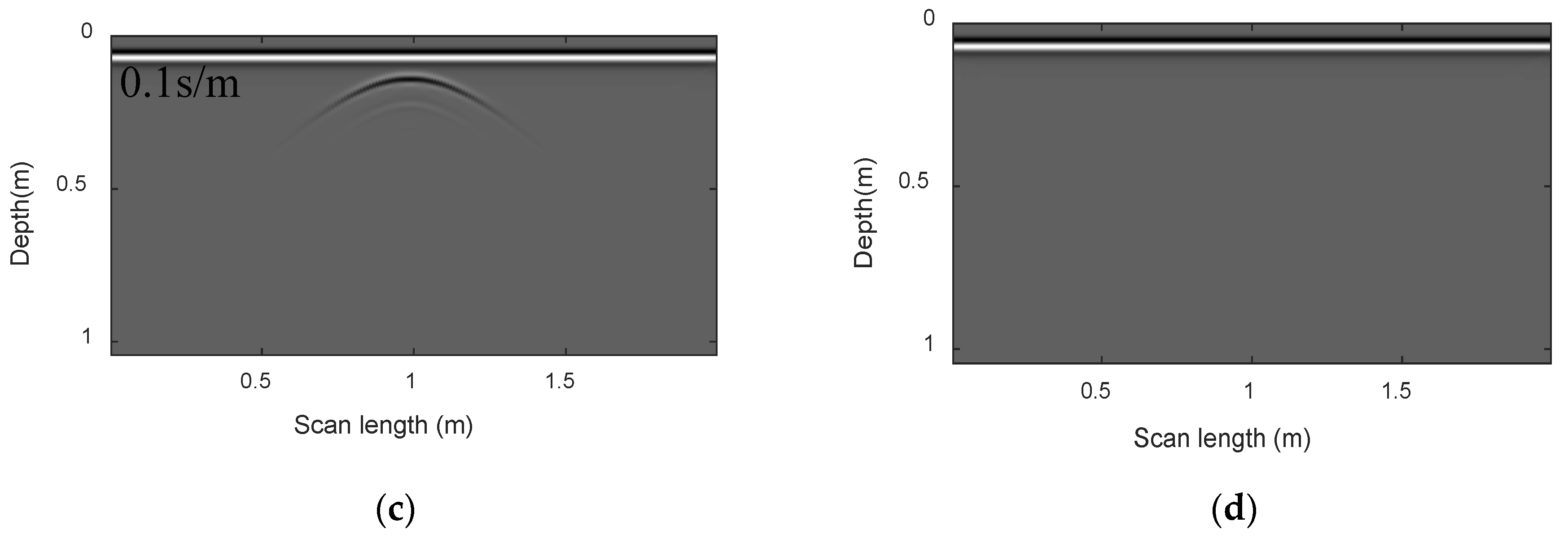
- Meanwhile, for aconductivity of 0.1 s/m, and at a depth of 0.3, the presence of the object is indicated by an almost invisible hyperbola, and at a depth of 0.7 m, the object is invisible.
4.1.1. Simulation of a Medium with a Conductivity of 0.001 s/m
4.1.2. Simulation of a Medium with a Conductivity of 0.01 s/m
4.1.3. Simulation of a Medium with a Conductivity of 0.1 s/m
4.2. Experimental Results (by GPR Radar)
- A conductive object,
- A container (empty and filled with sea water) and
- A rocky object.
4.2.1. Conductive Object
- Depth 0.3 m
- Depth of 0.5 m
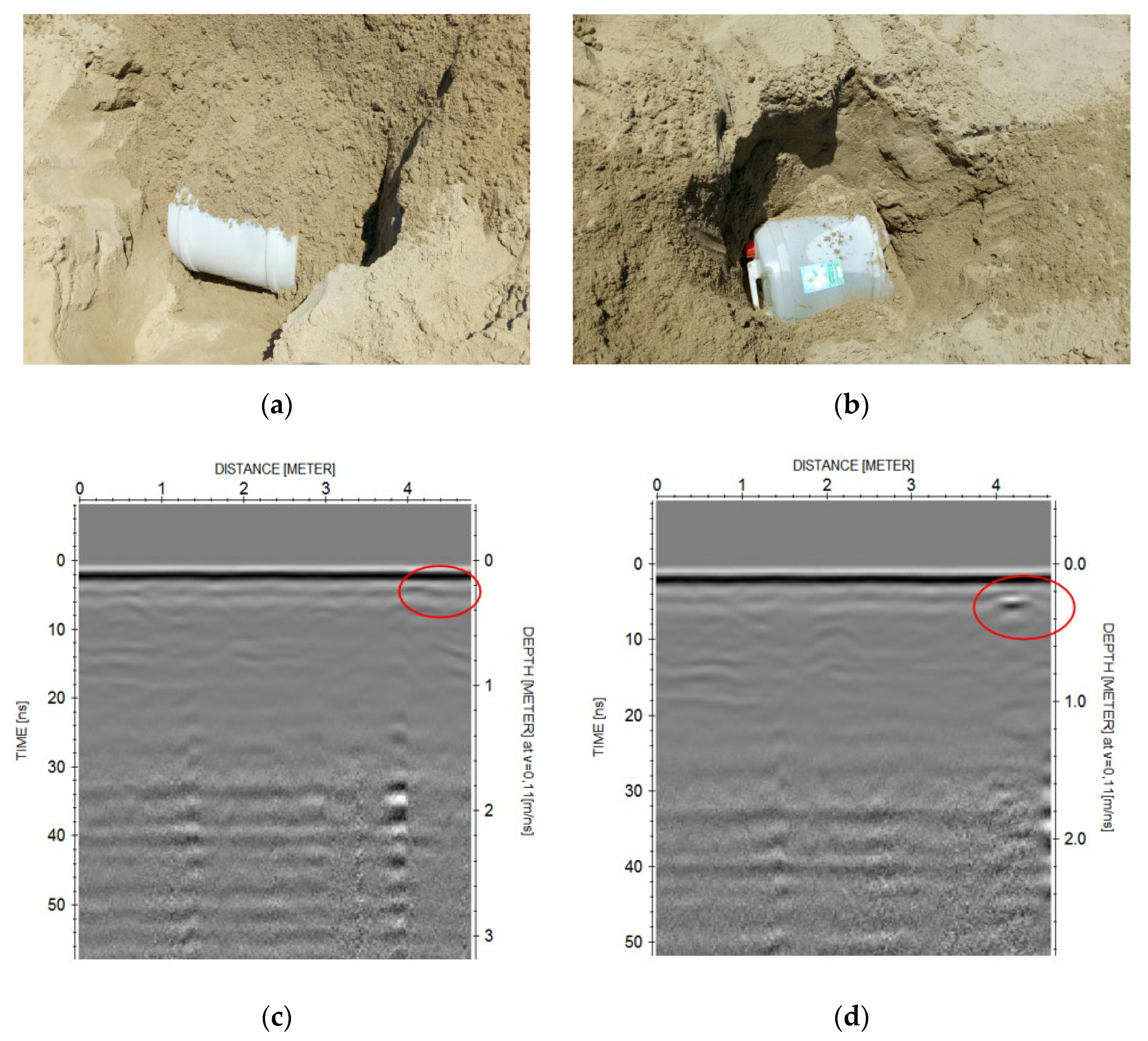
4.2.2. Use of Dielectric Objects: A Plastic Container (Empty Then Filled with Seawater)
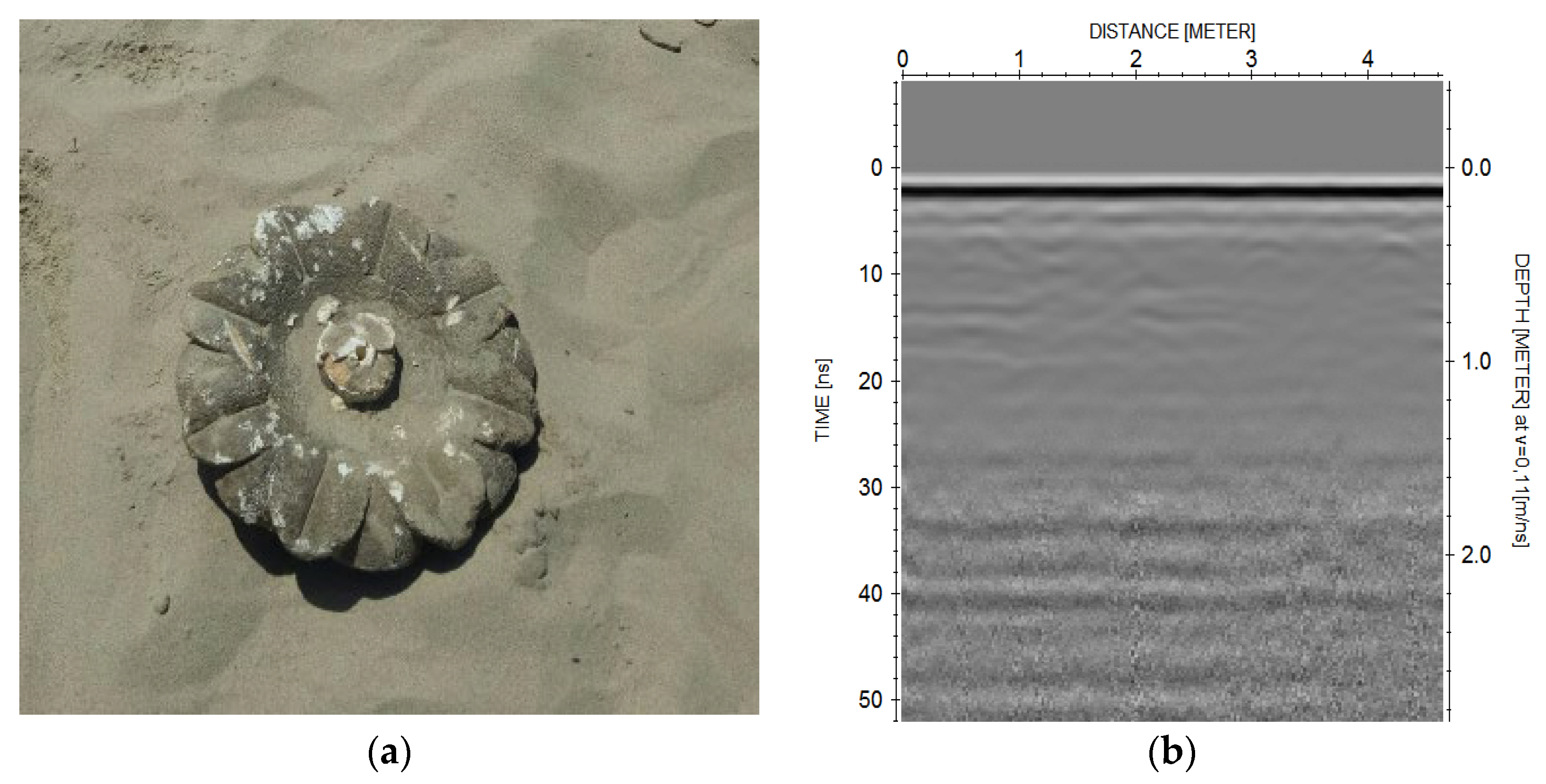
4.2.3. Use of a Rocky Object
5. Conclusions
- The conductive objects are easily detectable by GPR due to their high conductivities, which cause total reflection of the signal.
- The higher the difference in permittivity between the object and the medium, the greater the reflection strength of the signal.
- The humidity of the medium reducesthe penetration depth of GPR waves, which causes the non-detection of targets.
References
- Kanli, A.I.; Taller, G.; Nagy, P.; Tildy, P.; Pronay, Z.; Toros, E. GPR survey for reinforcement of historical heritage construction at fire tower of Sopron. J. Appl. Geophys. 2015, 112, 79–90. [Google Scholar] [CrossRef]
- Boubaki, N. Détection de Cavités Par DeuxMéthodesGéophysiques: Radar de Sol et Mesures de RésistivitésÉlectriques. Ph.D. Thesis, Université Paris Sud-Paris XI, Orsay, France, 2013. [Google Scholar]
- Mostapha, A.M.M.; Alsharahi, G.; Driouach, A. Effect of External Noise on Ground Penetrating Radar Ability to Detect Objects. Int. J. Microw. Opt. Technol. 2019, 14, 124–131. [Google Scholar]
- Alsharahi, G.; Faize, A.; Louzazni, M.; Mostapha, A.; Bayjja, M.; Driouach, A. Detection of cavities and fragile areas by numerical methods and GPR application. J. Appl. Geophys. 2019, 164, 225–236. [Google Scholar] [CrossRef]
- Heggy, E. Etude et Modélisationdes Performances des Radars SondeursBasseFréquence Pour la Recherchede L’eauDansle Sous-Sol de Mars. Ph.D. Thesis, Université Pierre et Marie Curie-Paris VI, Paris, France, 2002. [Google Scholar]
- Potin, D. Traitement des Signaux Pour la Détectionde Mines Antipersonnel. Ph.D. Thesis, Ecole Centrale de Lille, Villeneuve-d’Ascq, France, 2007. [Google Scholar]
- Faize, A.; Alsharahi, G.; Hamdaoui, M. Radar GPR Application to Explore and Study Archaeological Sites: Case Study. Int. J. Adv. Comput. Sci. Appl. 2020, 11, 179–182. [Google Scholar] [CrossRef]
- Alsharahi, G.; Faize, A.; Maftei, C.; Bayjja, M.; Louzazni, M.; Driouach, A.; Khamlichi, A. Analysis and Modeling of GPR Signals to Detect Cavities: Case Studies in Morocco. J. Electromagn. Eng. Sci. 2019, 19, 177–187. [Google Scholar] [CrossRef]
- Zhao, W.; Forte, E.; Fontana, F.; Pipan, M.; Tian, G. GPR imaging and characterization of ancient Roman ruins in the Aquileia Archaeological Park, NE Italy. Measurement 2018, 113, 161–171. [Google Scholar] [CrossRef]
- Annan, P. Ground Penetrating Radar Principles, Procedures and Applications; Sensors and Software: Mississauga, ON, Canada, 2003; 278p. [Google Scholar]
- Hamdaoui, M. Effect of electromagnetic parameters of the medium on the GPR data. Int. J. Emerg. Trends Eng. Res. 2020, 8, 1749–1755. [Google Scholar] [CrossRef]
- Perez, R. Contribution à L’analyseThéoriqueet Expérimentalede Bscan GPR: Performances des Antennes: ApportsD’une Configuration Multistatique. Ph.D. Thesis, Université de Limoges, Limoges, France, 2005. [Google Scholar]
- Mehennaoui, N. Etude Théoriquede la Propagation des OndesÉlectromagnétiquesDansles MilieuxHétérogènes-Application au Radar Sol. Master’s Thesis, Université Ferhat Abbas-Setif, Sétif, Algeria, 2018. [Google Scholar]
- Mostapha, A.M.M.; Alsharahi, G.; Driouach, A. Simulation effect of polarization of targets on the Ground Penetrating Radar response. In Proceedings of the 2017 International Conference on Wireless Technologies, Embedded and Intelligent Systems (WITS), Fez, Morocco, 19–20 April 2017. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mostapha, A.M.M.; Alsharahi, G.; Faize, A.; Driouach, A. Effect of the Variation in Humidity of the Medium on the GPR Radar Response. Proceedings 2020, 63, 37. https://doi.org/10.3390/proceedings2020063037
Mostapha AMM, Alsharahi G, Faize A, Driouach A. Effect of the Variation in Humidity of the Medium on the GPR Radar Response. Proceedings. 2020; 63(1):37. https://doi.org/10.3390/proceedings2020063037
Chicago/Turabian StyleMostapha, Aye Mint Mohamed, Gamil Alsharahi, Ahmed Faize, and Abdellah Driouach. 2020. "Effect of the Variation in Humidity of the Medium on the GPR Radar Response" Proceedings 63, no. 1: 37. https://doi.org/10.3390/proceedings2020063037
APA StyleMostapha, A. M. M., Alsharahi, G., Faize, A., & Driouach, A. (2020). Effect of the Variation in Humidity of the Medium on the GPR Radar Response. Proceedings, 63(1), 37. https://doi.org/10.3390/proceedings2020063037