The Effects of Weighting Functions on the Performances of Robust Control Systems †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
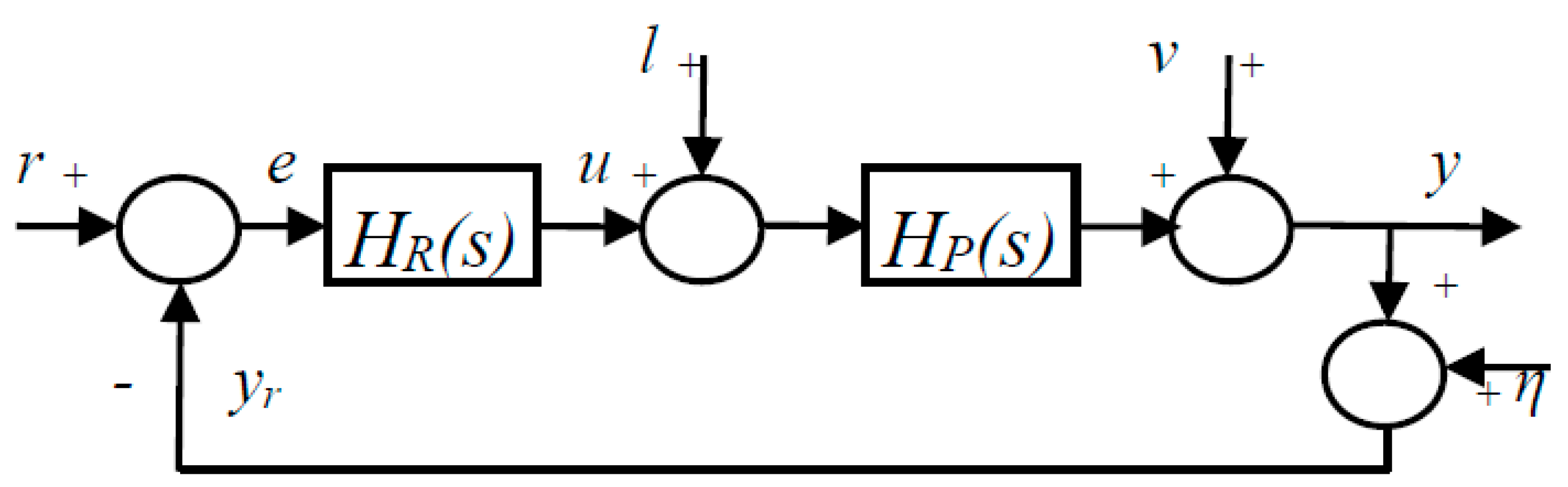
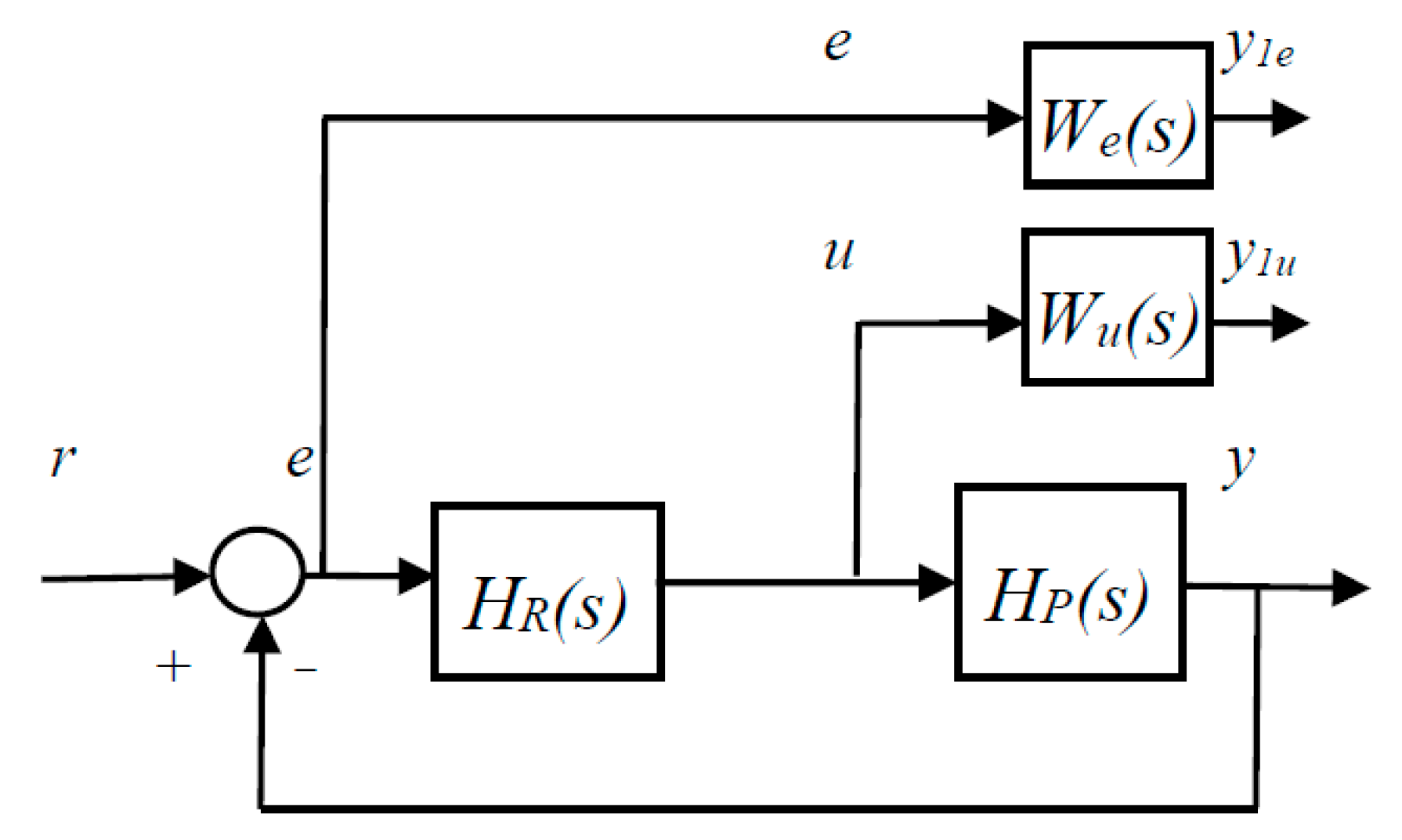
:1. Introduction
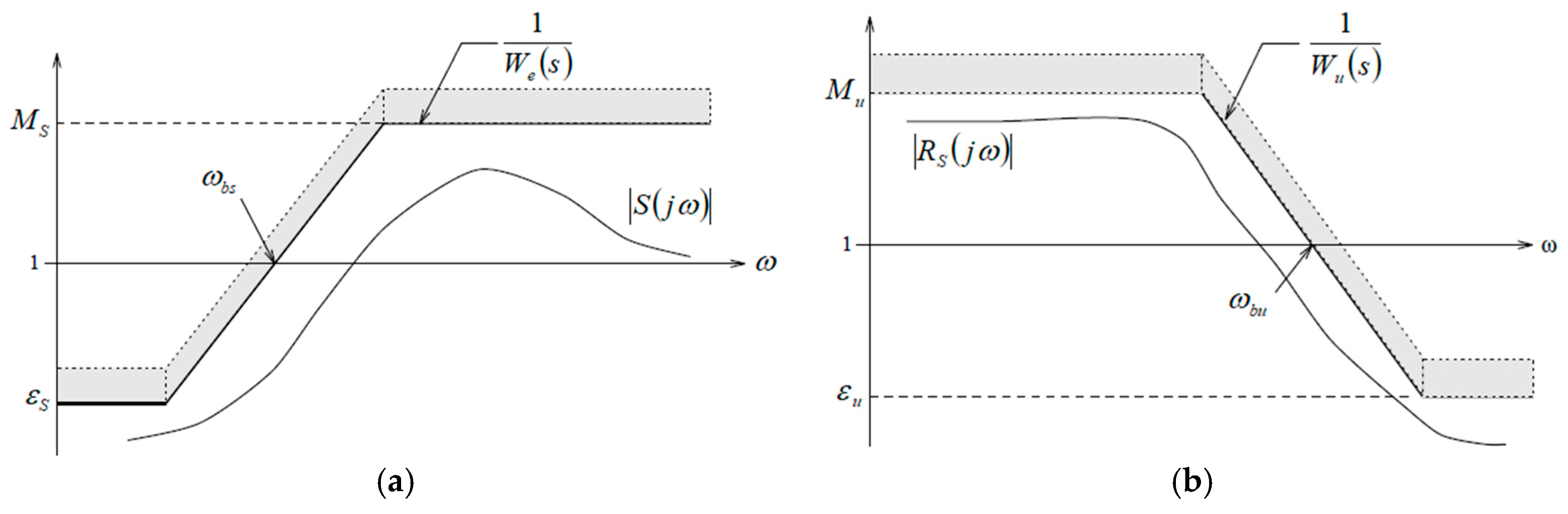
- The sensitivity function
- The complementary sensitivity function
- The noise sensitivity function
- The load sensitivity function
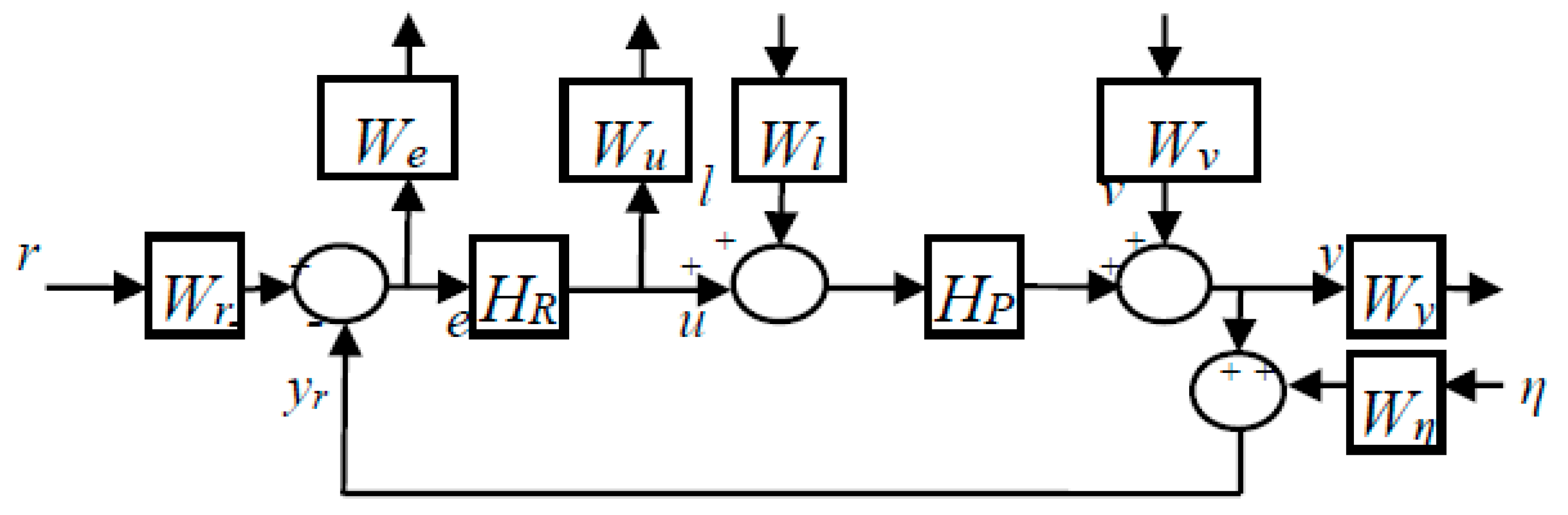
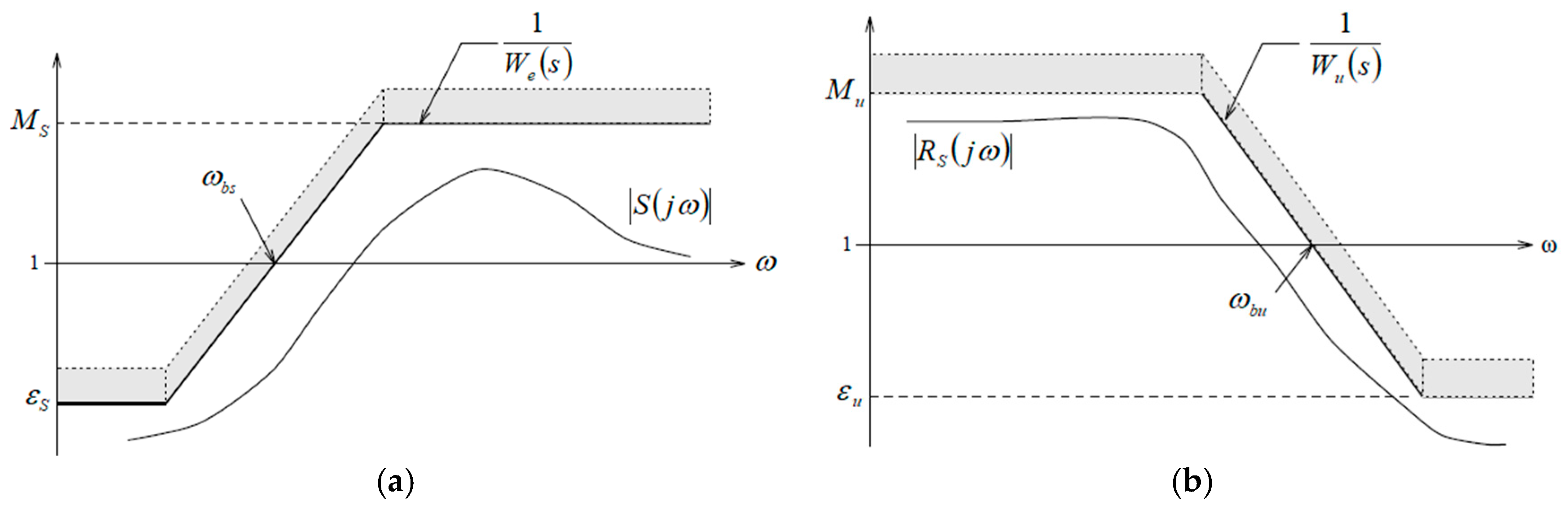
2. Recommendations for Choosing the Models for the Weighting Functions
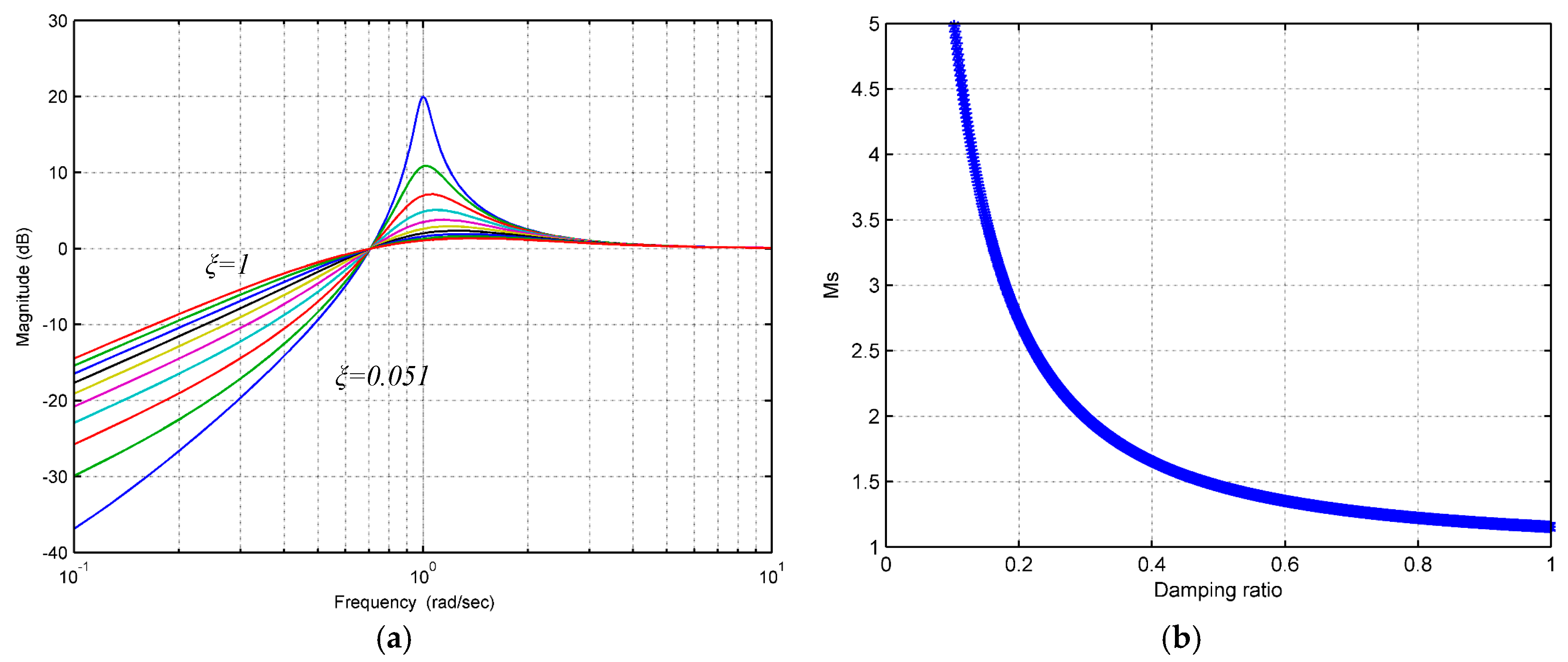
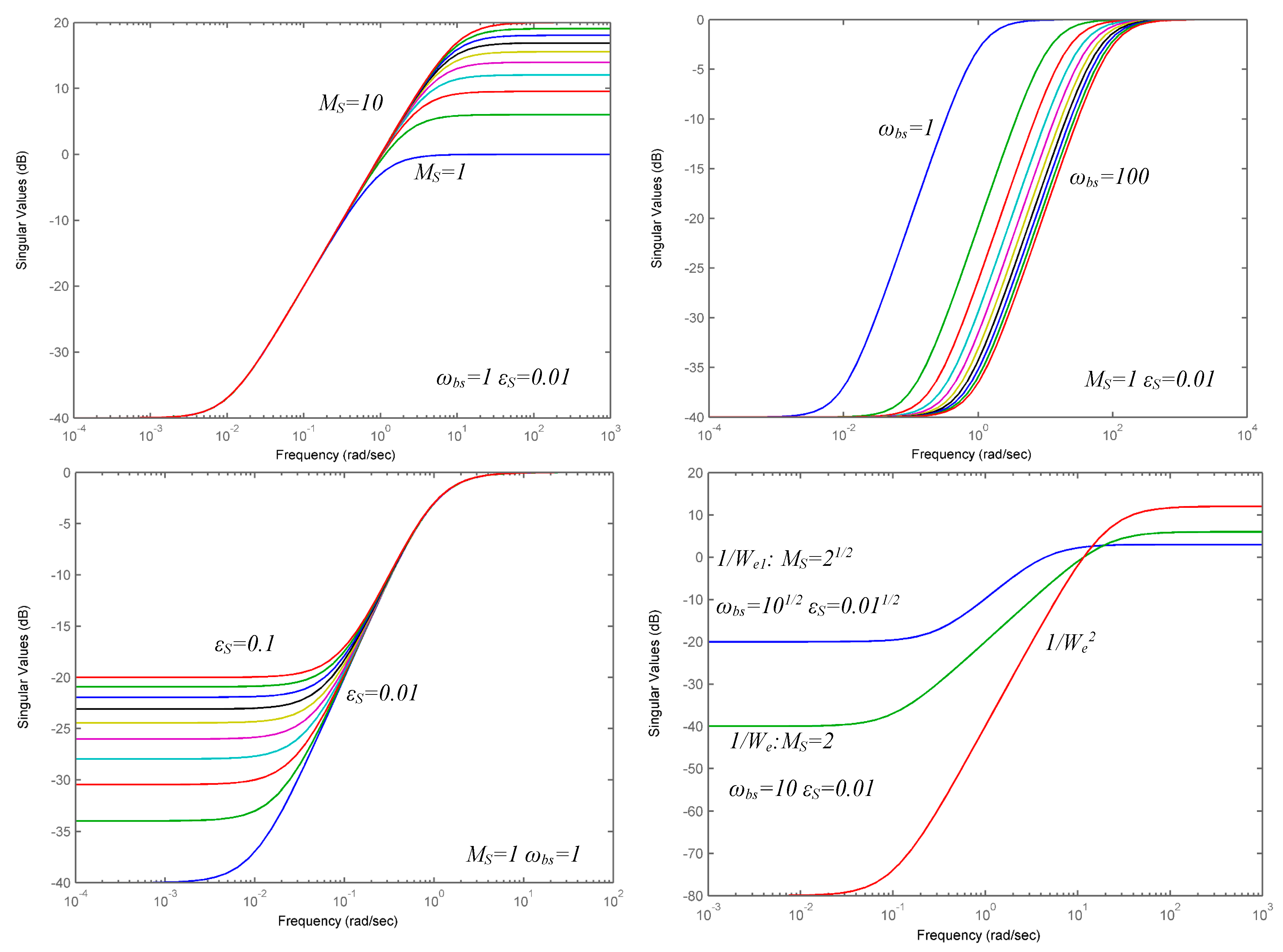
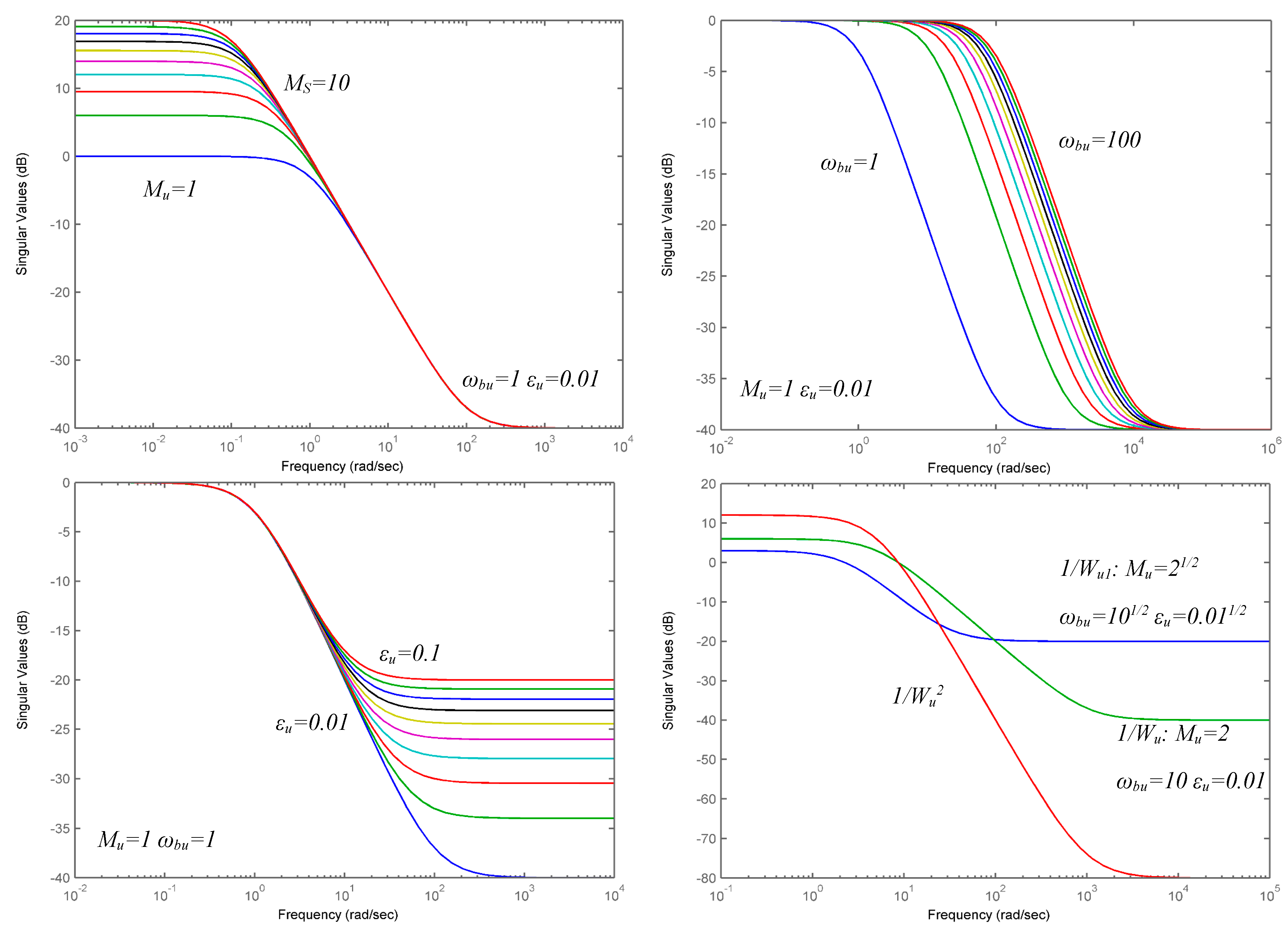
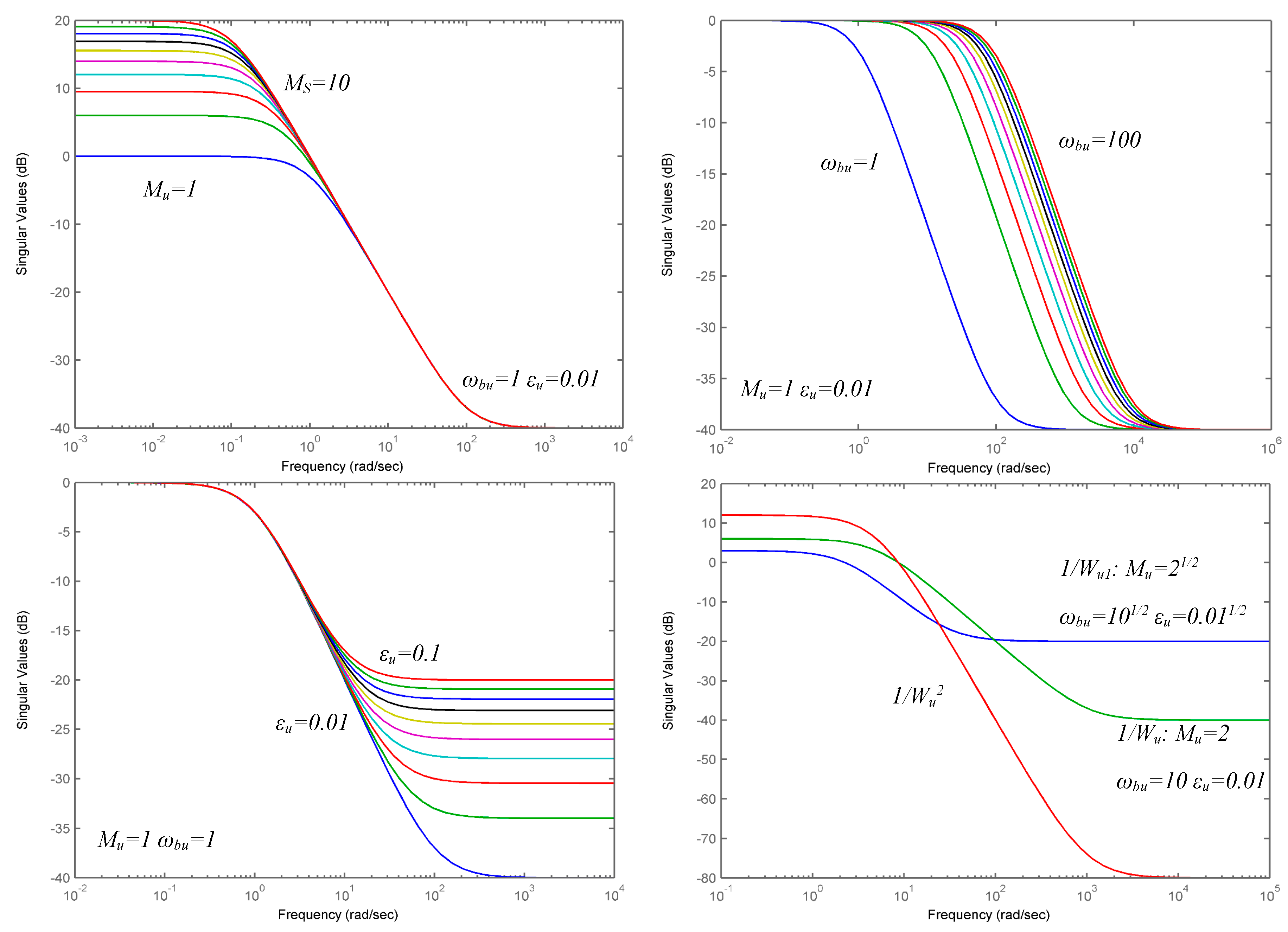
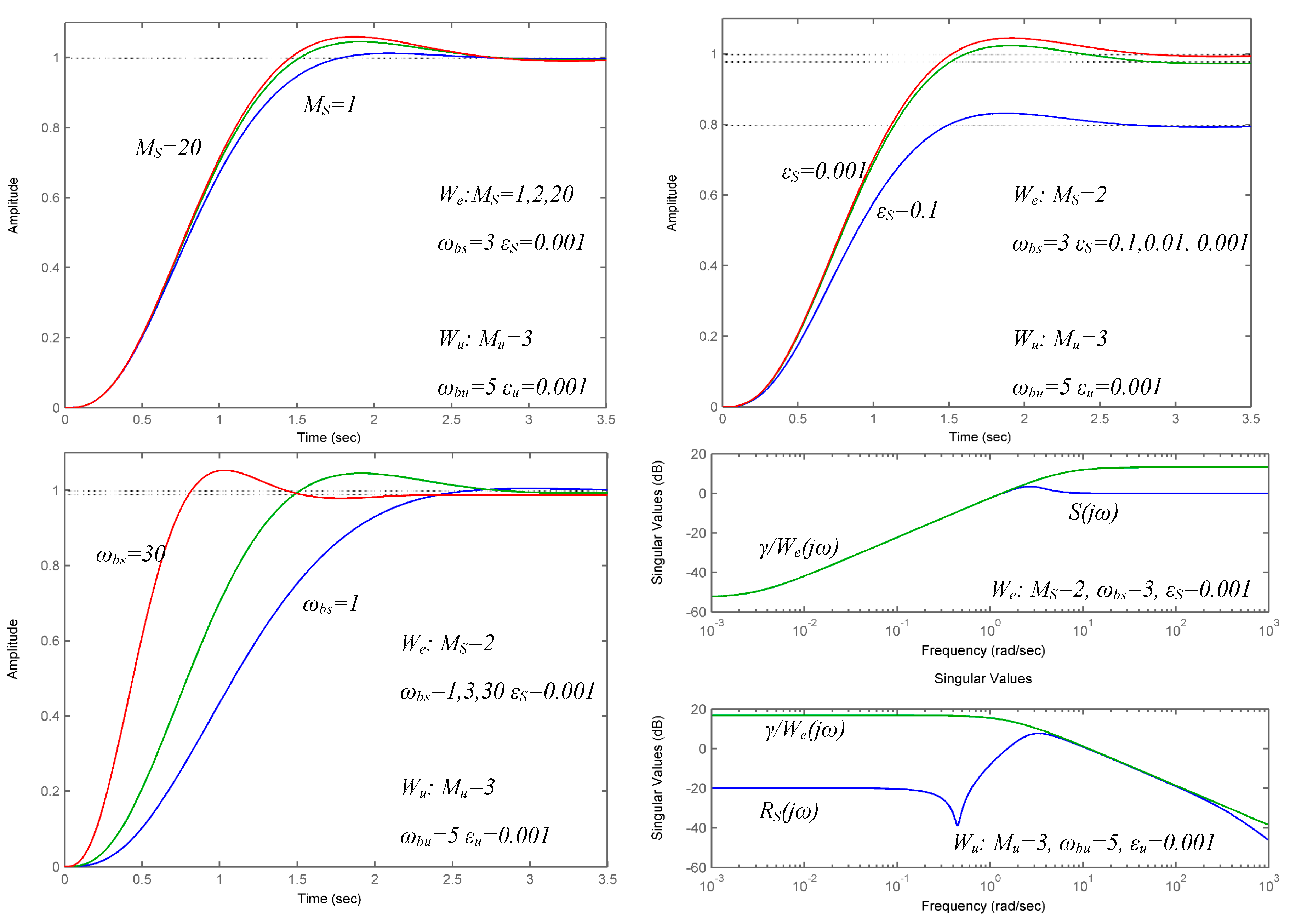
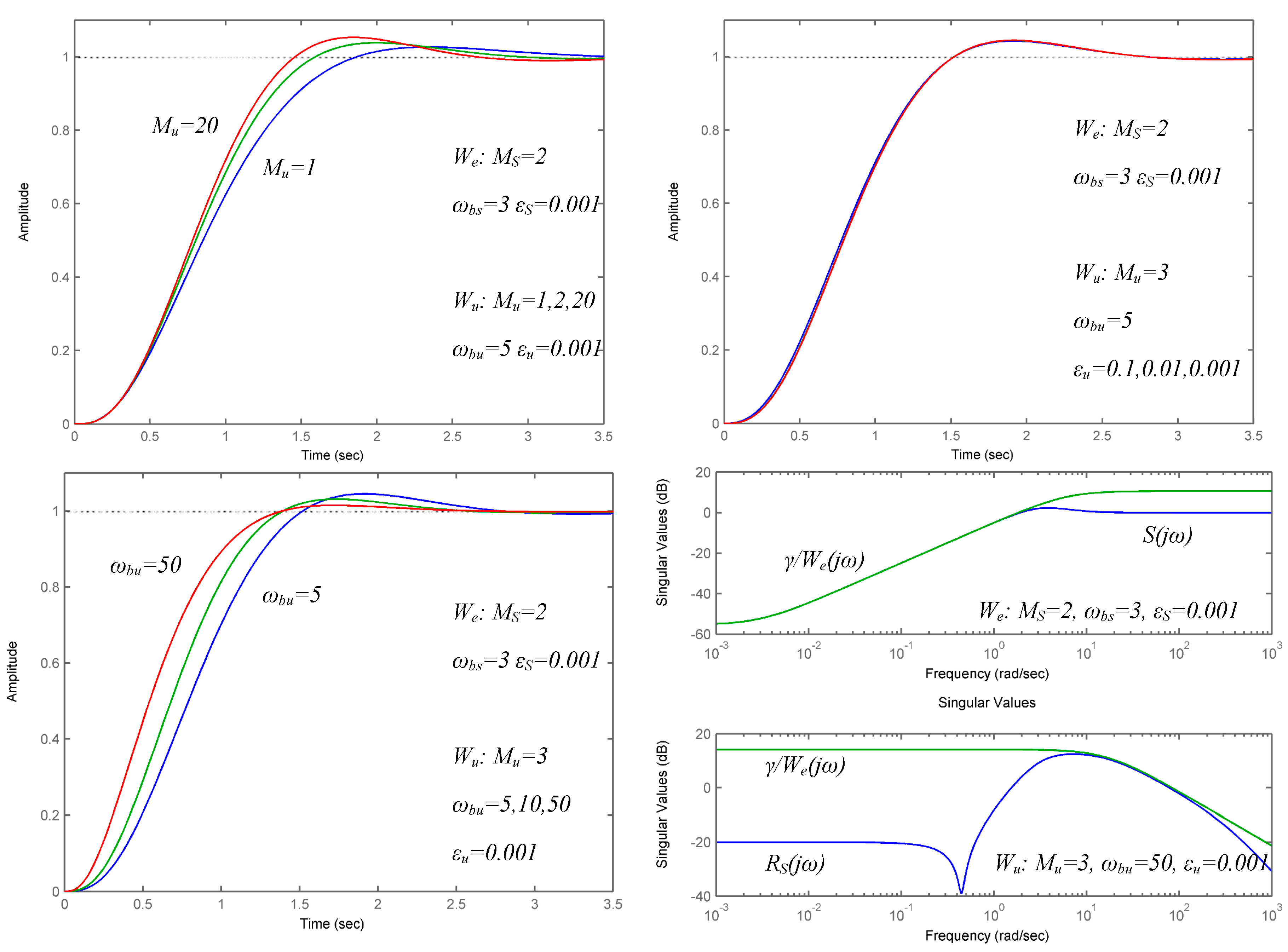
3. The Effect of the Parameters on the Weighting Functions
4. Results of the Analysis of the Closed-Loop Control System
5. Conclusions
- Reducing the control error, rejecting the disturbances and ensuring the desired performances;
- Reducing the effect of the variations of the parameters in the open-loop system on the transition to the closed-loop system, i.e., ensuring the robustness of the control system in case of uncertainties.
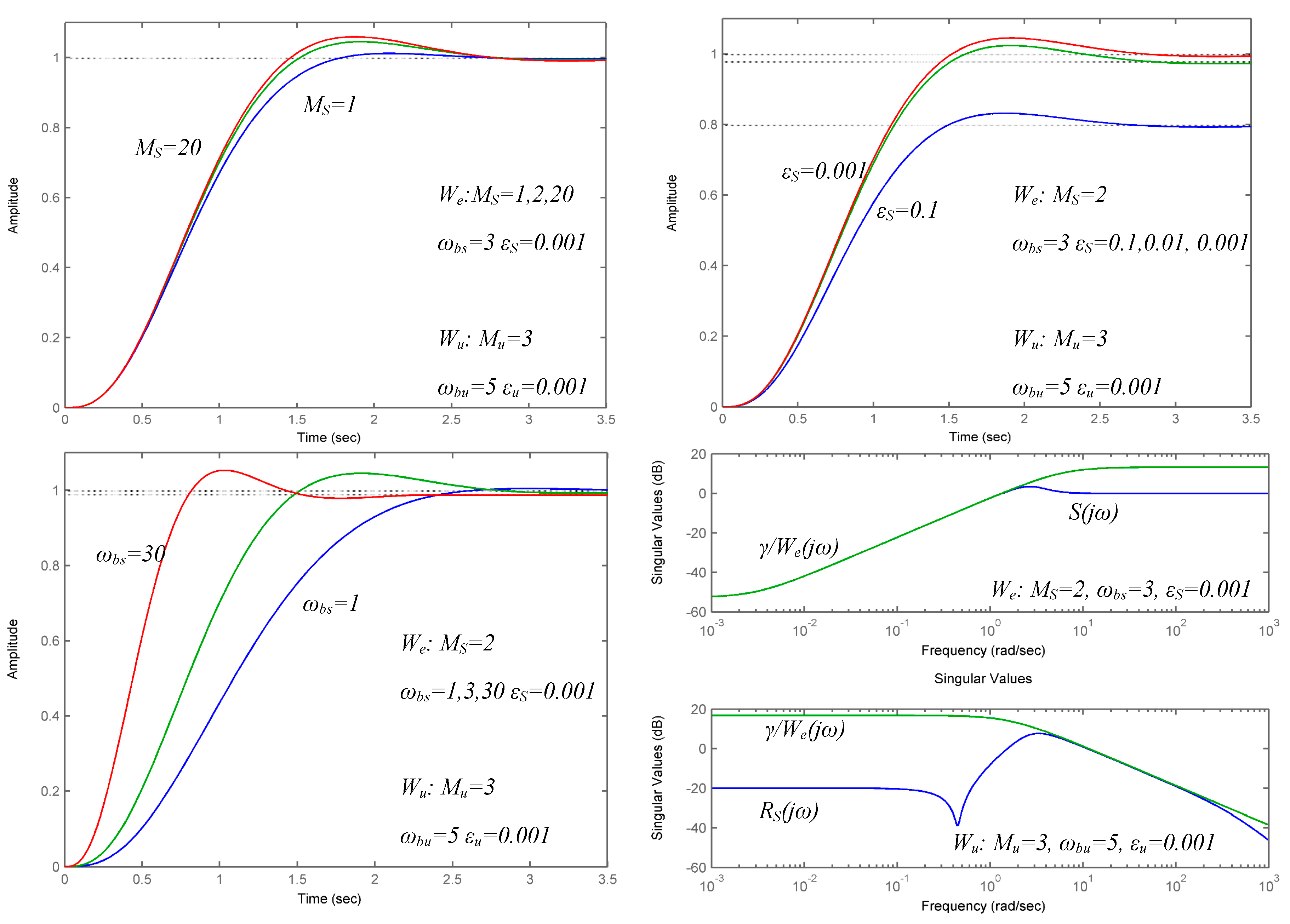
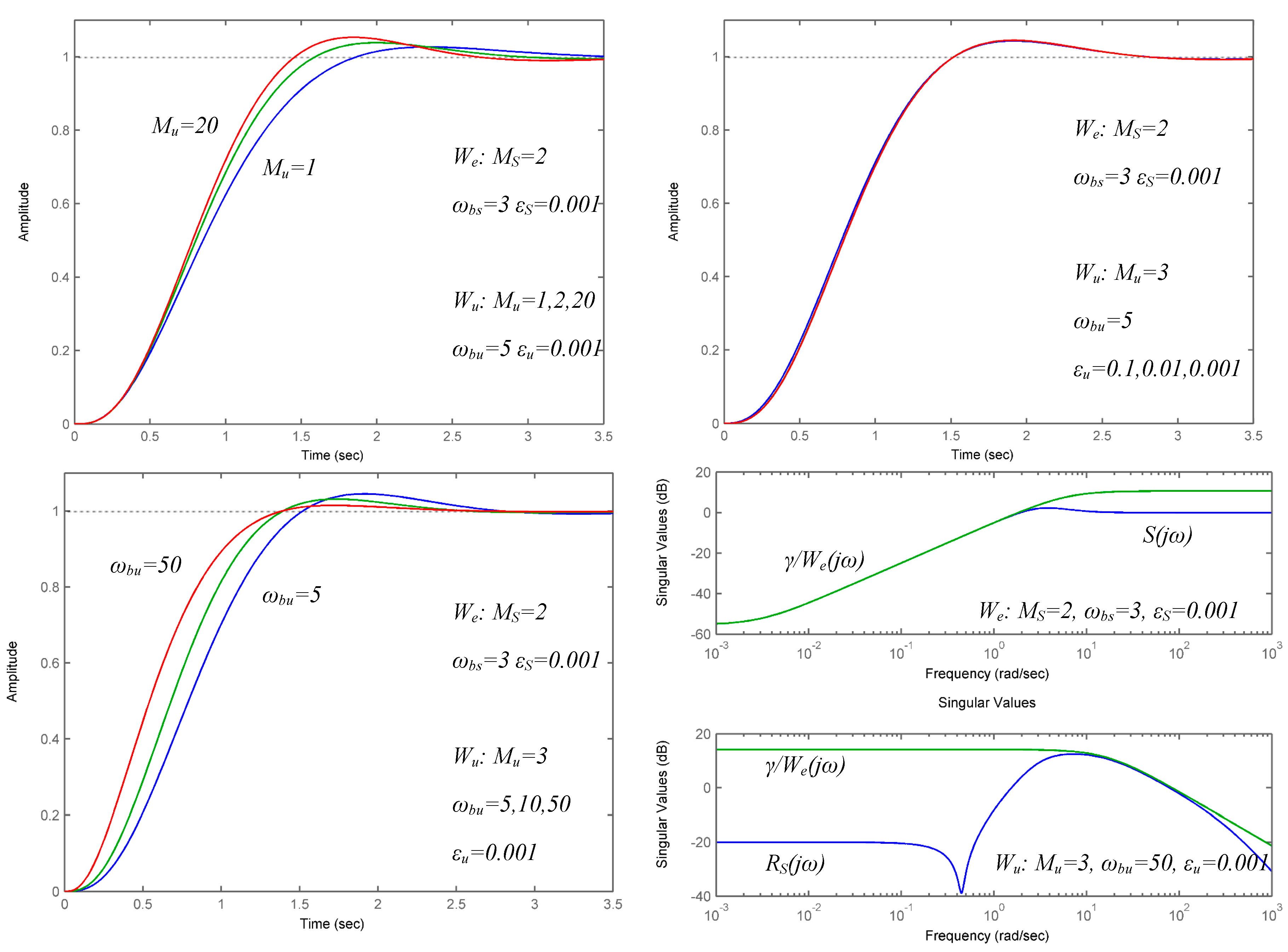
- Increasing the leads to a higher overshoot; reasonable values for the overshoot and for the gain (robustness) margin are obtained for ;
- Increasing the leads to a lower transient time, meaning a faster response of the closed-loop system and a quick rejection of the disturbances; a higher value for highlights a closed-loop system which is more sensitive to disturbances and parameter variations; a low value for indicates a longer response time and a more robust system;
- A low value imposed to the (e.g., ) leads to a high steady state error; so, the recommended value is (e.g., ).At the same time, for the weighting function :
- it is chosen according to the restrictions imposed to the actuator; increasing the leads to a higher overshoot and a reasonable value is obtained for ;
- Increasing the leads to a lower response time of the closed-loop system; a lower value of assures a better limitation of the measurement noise;
- The value of does not significantly influence the performances of the closed-loop system.
Author Contributions
Funding
Conflicts of Interest
References
- Grimble, M.J.; Biss, D. Selection of optimal control weighting functions to achieve good H/sub infinity/robust designs. In Proceedings of the IEEE International Conference on Control, Oxford, UK, 13–15 April 1988; pp. 683–688. [Google Scholar]
- Gu, D.W.; Petkov, P.H.; Konstantinov, M.M. Robust Control Design with MATLAB; Springer: London, UK, 2005. [Google Scholar]
- Ionescu, V.; Varga, A. Systems Theory. Robust Synthesis. Numerical Methods (Romanian Version, Teoria Sistemelor. Sinteza Robusta. Metode Numerice de Calcul); ALL Publishing: Bucharest, Romania, 1994. [Google Scholar]
- Popescu, D. Analysis and Synthesis of Robust Systems (Romanian Version, Analiza si Sinteza Sistemelor Robuste); Universitaria Publishing: Craiova, Romania, 2010. [Google Scholar]
- Zhou, K. Essentials of Robust Control; Prentice Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Raafat, S.M.; Akmeliawati, R. Bounded constrained optimization of performance weighting function for precise robust positioning control system. In Proceedings of the IEEE 4th International Conference on Mechatronics, Kuala Lumpur, Malaysia, 17–19 May 2011; pp. 1–7. [Google Scholar]
- Qinghai, H.; Jing, L.; Qingzhu, H.; Wen, Z.; Hai, Z. The selections of nominal plant and weighting functions for robust control design. In Proceedings of the IEEE 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 771–775. [Google Scholar]
- Heng, Q.; Lu, J.; Lu, Y.; Zhou, H. μ-synthesis robust control of a boiler combustion system. In Proceedings of the IEEE 30th Chinese Control Conference, Yantai, China, 22–24 July 2011; pp. 2331–2334. [Google Scholar]
- Beaven, R.W.; Wright, M.T.; Seaward, D.R. Weighting function selection in the Hinf design process. Control Eng. Pract. 1996, 4, 625–633. [Google Scholar] [CrossRef]
- Munawa, P.; Folly, K.A. Selection of weighing functions in Hinf controller design using PBIL. In Proceedings of the IEEE International Joint Conference on Neural Networks, Beijing, China, 6–11 July 2014; pp. 1733–1738. [Google Scholar]
- Veenman, J.; Lahr, M.; Scherer, C.W. Robust controller synthesis with unstable weights. In Proceedings of the IEEE 55th Conference on Decision and Control, Las Vegas, NV, USA, 12–14 December 2016; pp. 2390–2395. [Google Scholar]
- Balas, G.; Chiang, R.; Packard, A.; Safonov, M. Robust Control Toolbox. Getting Started Guide R2013b; The MathWorks, Incorporations: Natick, MA, USA, 2013. [Google Scholar]
- Mathworks. Matlab Control System Toolbox. Available online: https://ch.mathworks.com/products/robust.html?s_tid=srchtitle (accessed on 10 August 2020).
- Geng, L.; Yang, Z.; Zhang, Y. A Weighting Function Design Method for the H-infinity Loop-shaping Design Procedure. In Proceedings of the Chinese Control and Decision Conference, Shenyang, China, 9–11 June 2018; pp. 4489–4493. [Google Scholar]
- Pathak, D.; Sambariya, D.K. Methodologies for the Selection of Weighting Function. In Proceedings of the IEEE 2nd International Conference on Power Energy, Greater Noida, India, 18–19 October 2019; pp. 347–350. [Google Scholar]
- Usami, T.; Yubai, K.; Yashiro, D.; Komada, S. Low-order multivariable weighting function design for Hinf loop shaping method based on ν-gap. In Proceedings of the IEEE International Conference on Industrial Technology, Lyon, France, 20–22 February 2018; pp. 223–228. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dulau, M.; Oltean, S.-E. The Effects of Weighting Functions on the Performances of Robust Control Systems. Proceedings 2020, 63, 46. https://doi.org/10.3390/proceedings2020063046
Dulau M, Oltean S-E. The Effects of Weighting Functions on the Performances of Robust Control Systems. Proceedings. 2020; 63(1):46. https://doi.org/10.3390/proceedings2020063046
Chicago/Turabian StyleDulau, Mircea, and Stelian-Emilian Oltean. 2020. "The Effects of Weighting Functions on the Performances of Robust Control Systems" Proceedings 63, no. 1: 46. https://doi.org/10.3390/proceedings2020063046
APA StyleDulau, M., & Oltean, S.-E. (2020). The Effects of Weighting Functions on the Performances of Robust Control Systems. Proceedings, 63(1), 46. https://doi.org/10.3390/proceedings2020063046