Anonymous Detection of Traveler Flows Employing Bluetooth Technologies †




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
2.1. Employment of Indirect Measurement Techniques in Traffic and Traveler Detection
2.2. Expected Improvements in BT 5.0 over BT 4.x and Threats of BT Communications
3. Concept of the System and Test Bed
3.1. Concept of the System
3.2. Test Bed
- Outdoors for testing the open field propagation conditions, in a comparison between the Bluetooth 4.x and Bluetooth 5.0 technologies;
- Indoors, in a subway station (“Politehnica” on M1 metro line in Bucharest, Romania).
4. Results of the Tests and Analysis
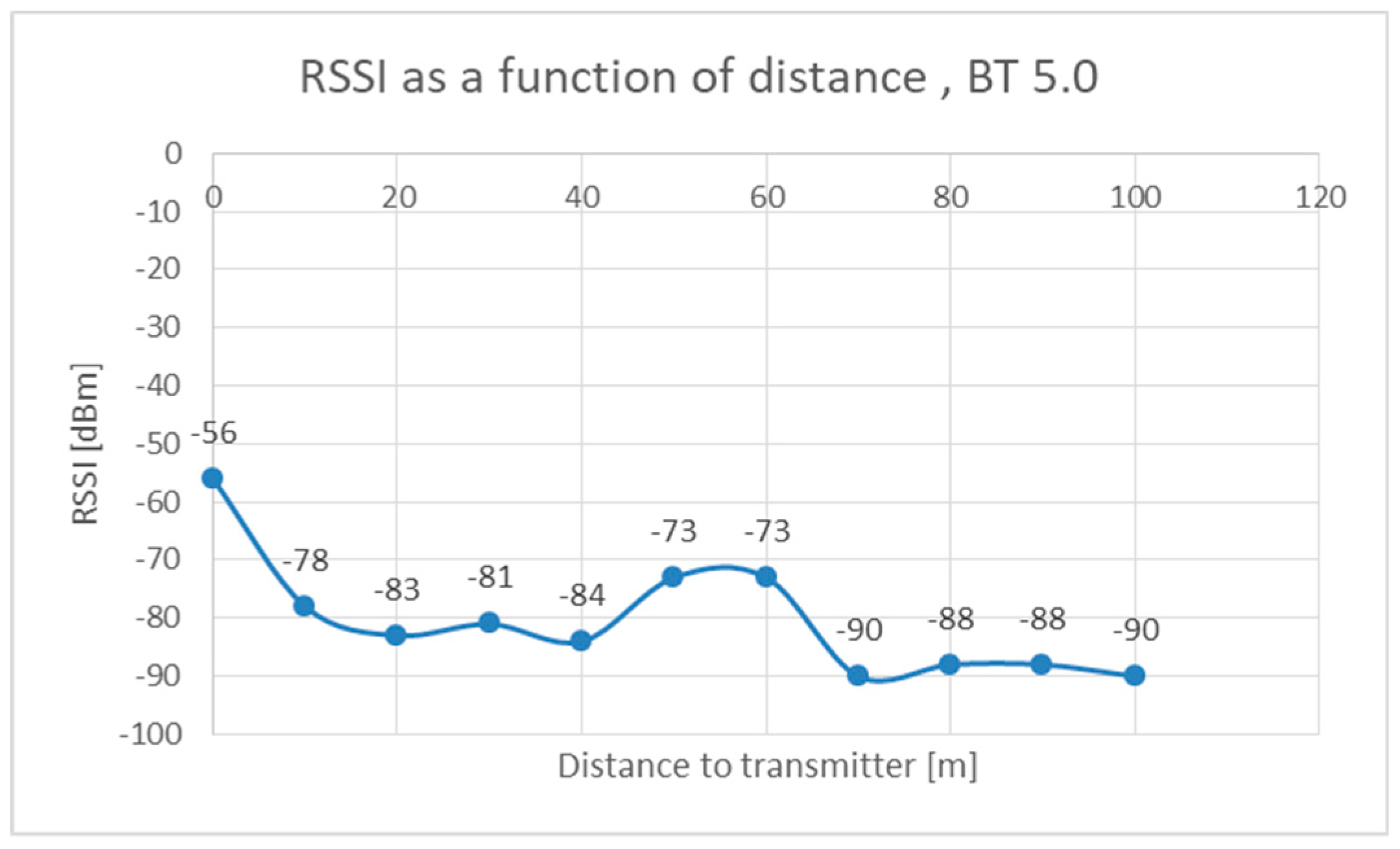
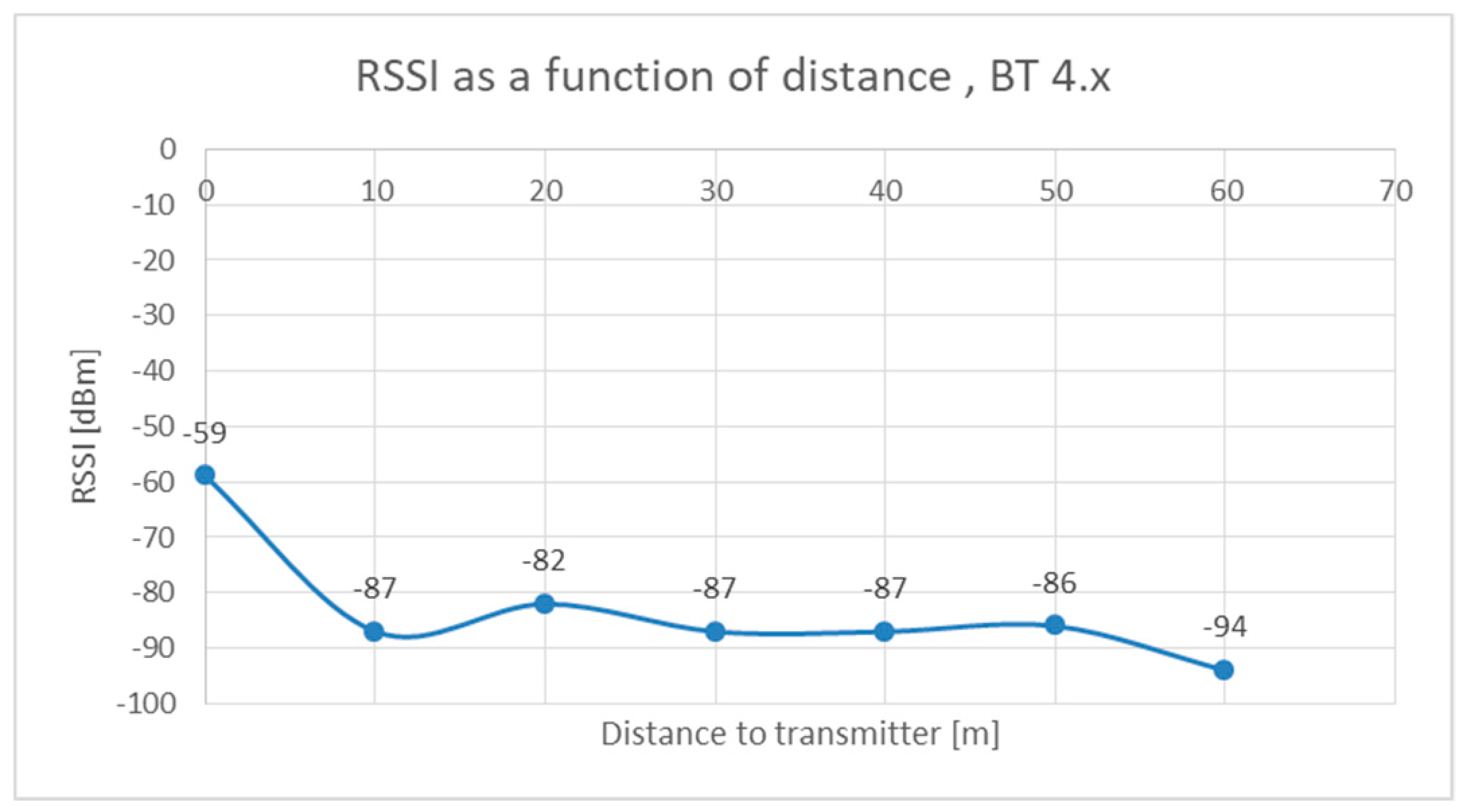
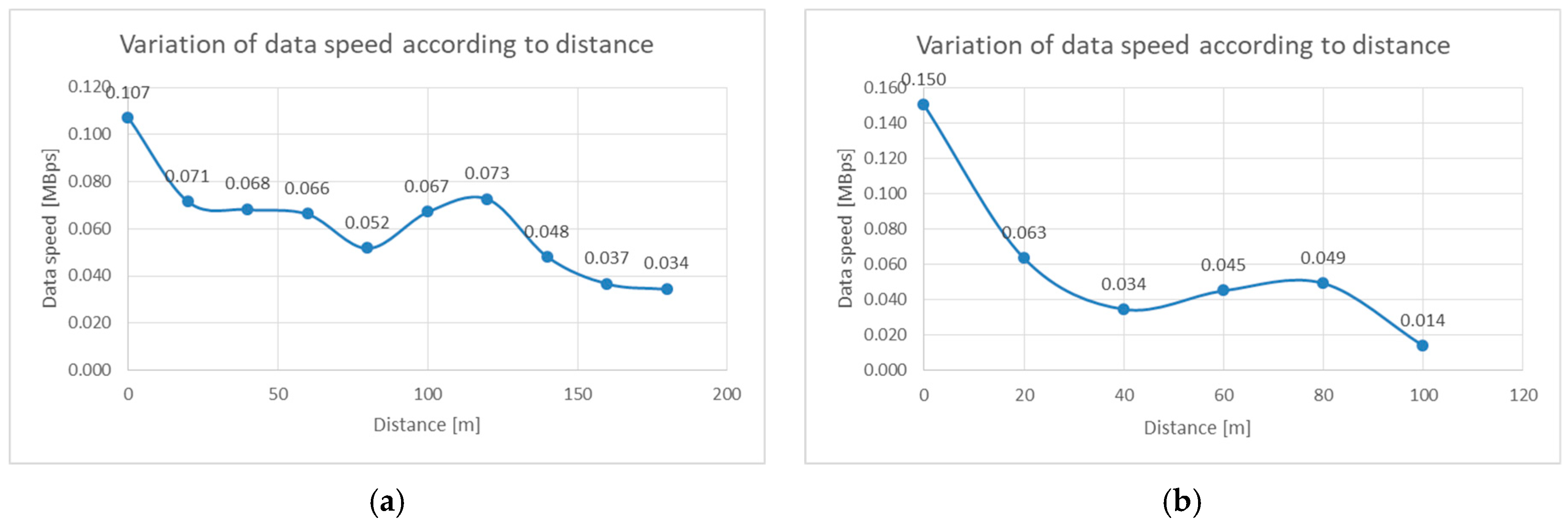
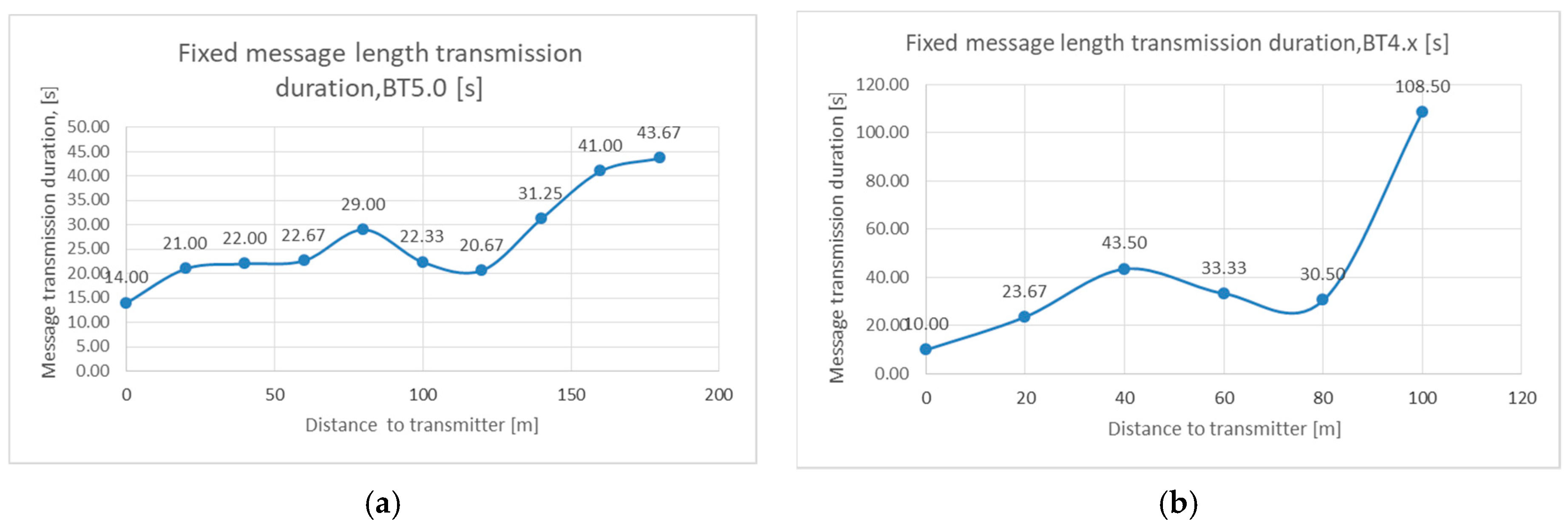
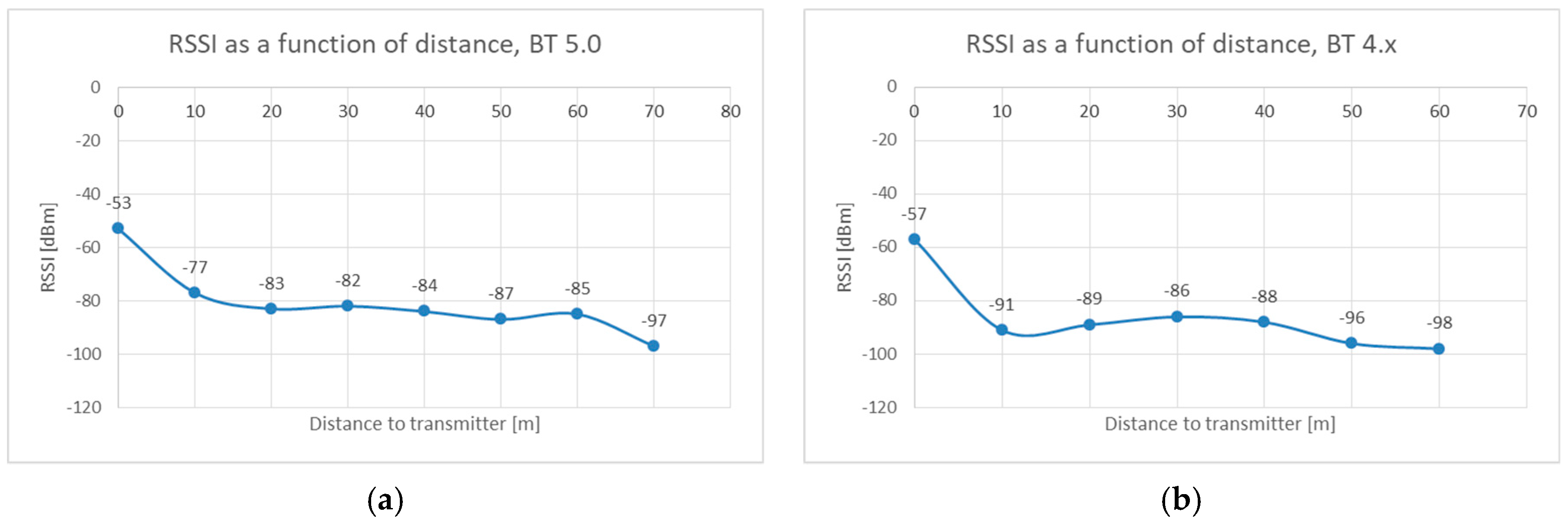
4.1. Open Field Tests
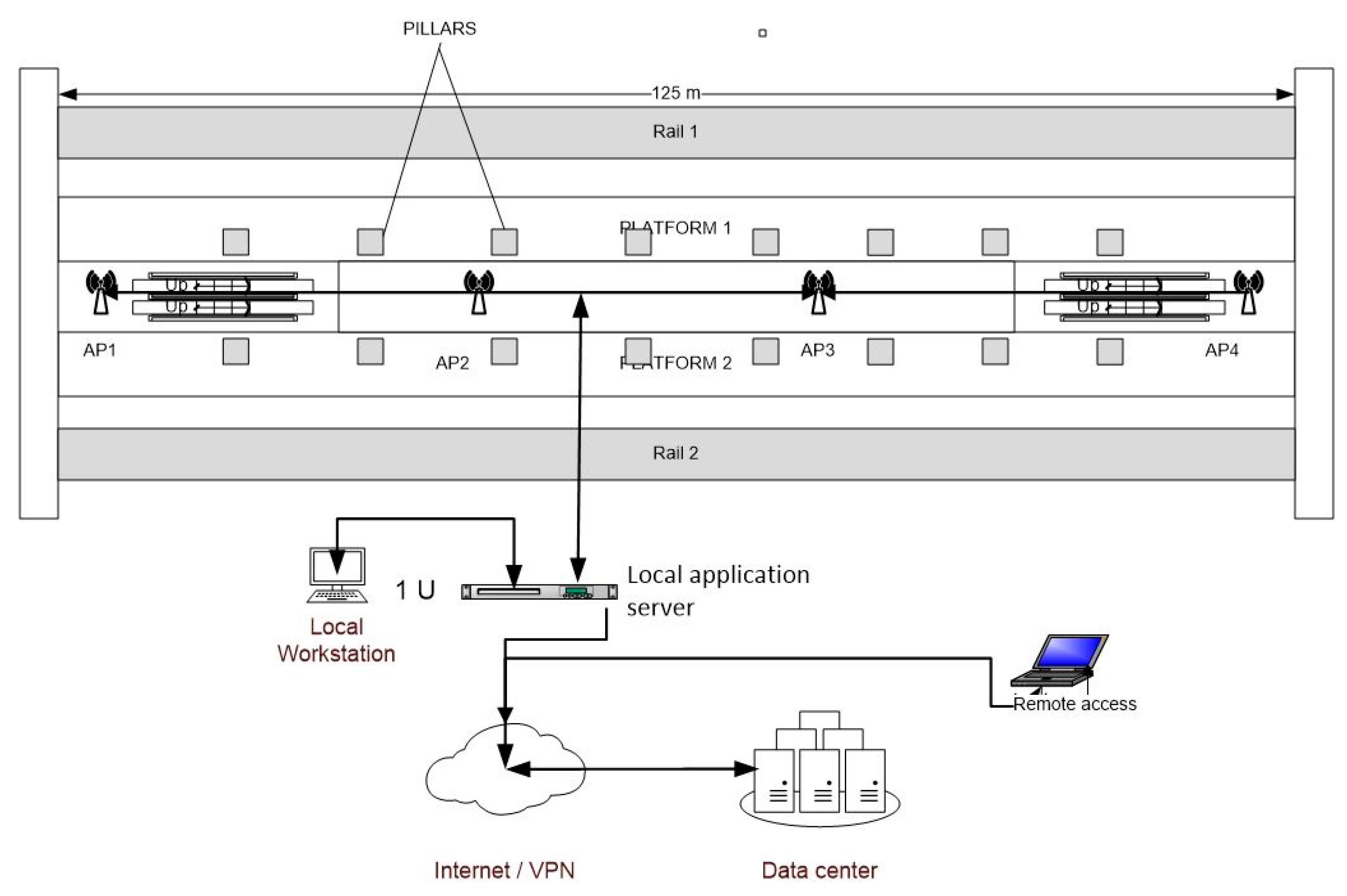
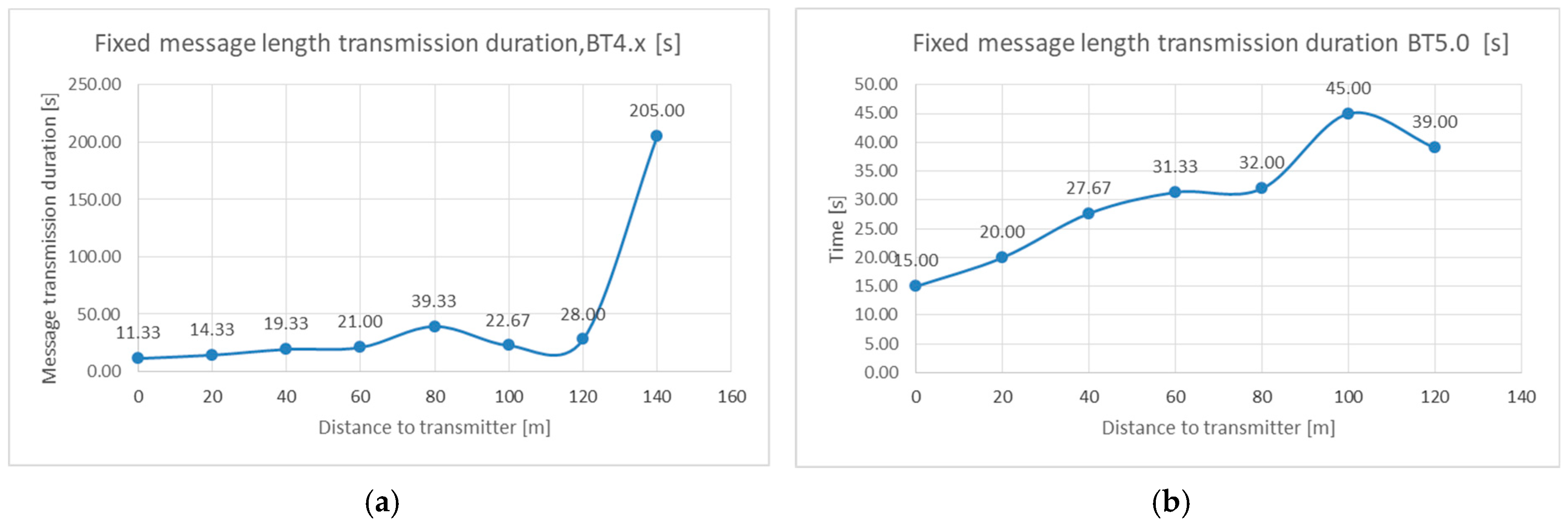
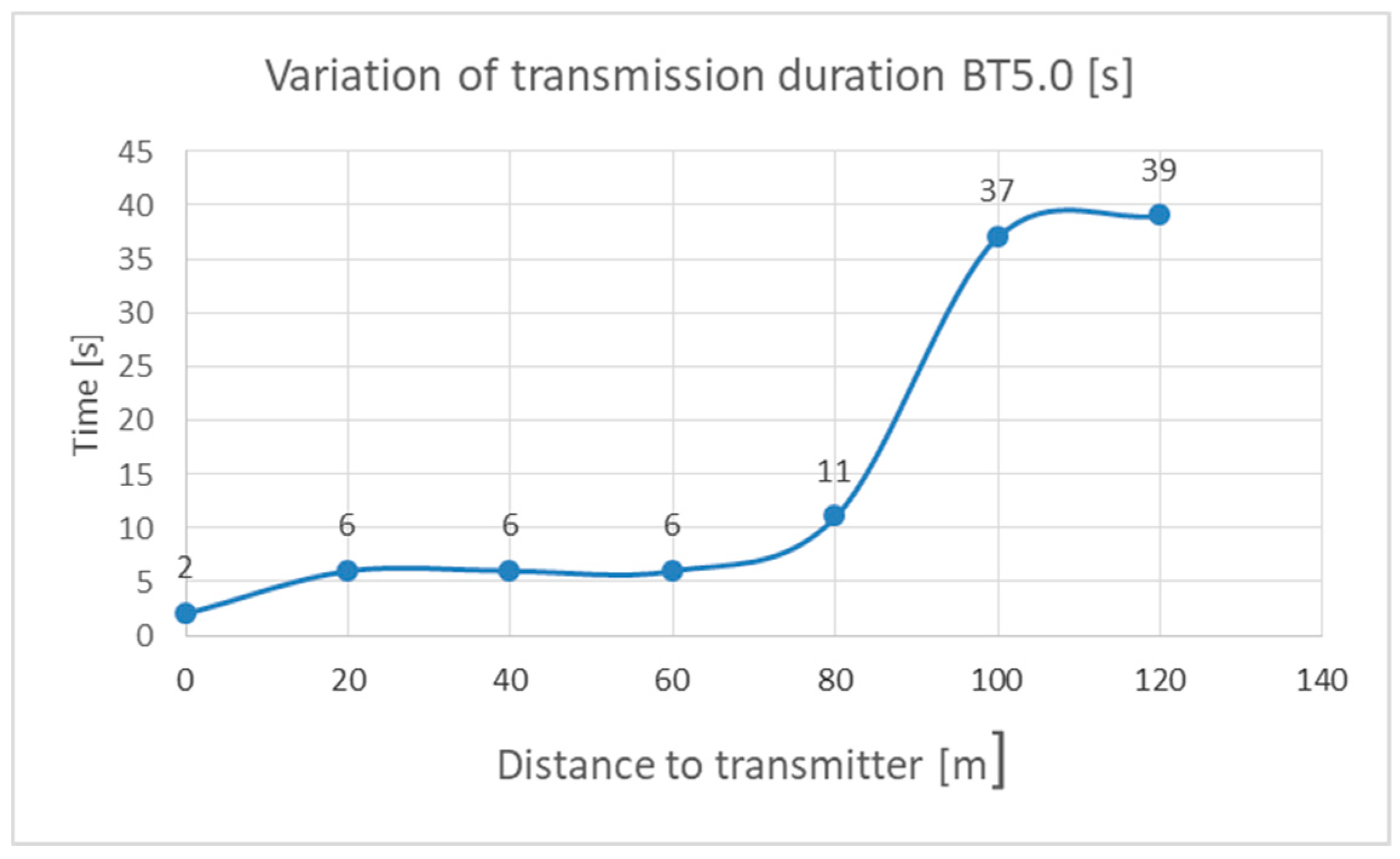
4.2. Tests Performed in the Subway Station
5. Conclusions
Funding
Conflicts of Interest
References
- Ruppe, S.; Junghans, M.; Haberjahn, M.; Troppenz, C. Augmenting the Floating Car Data Approach by Dynamic Indirect Traffic Detection. Procedia Soc. Behav. Sci. 2012, 48, 1525–1534. [Google Scholar] [CrossRef]
- Sharifi, E.; Shamedi, M.; Haghani, A.; Sadrsadat, H. Analysis of Vehicle Detection Rate for Bluetooth Traffic Sensors: A Case Study in Maryland and Delaware. In Proceedings of the 18th World Congress on Intelligent Transport Systems, Orlando, FL, USA, 16–20 October 2011. [Google Scholar]
- Collotta, M.; Pau, G.; Talty, T.; Tonguz, O.K. Bluetooth 5: A Concrete Step Forward toward the IoT. IEEE Commun. Mag. 2018, 56, 125–131. [Google Scholar] [CrossRef]
- Abbot-Jard, M.; Shah, H.; Bhaskar, A. Empirical Evaluation of Bluetooth and Wi-Fi Scanning for Road Transport. In Proceedings of the Australasian Transport Research Forum 2013 Proceedings, Brisbane, Australia, 2–4 October 2013. [Google Scholar]
- Diaz, J.J.V.; Gonzalez, A.B.R.; Wilby, M.R. Bluetooth Traffic Monitoring Systems for Travel Time Estimation on Freeways. IEEE Trans. Intell. Transp. Syst. 2016, 17, 123–132. [Google Scholar] [CrossRef]
- Shlayan, N.; Kurcku, A.; Ozbay, K. Exploring Pedestrian Bluetooth and WiFi Detection at Public Transportation Terminals. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016. [Google Scholar]
- Bachmann, C.; Roorda, M.J.; Abdulhai, B.; Moshiri, B. Fusing a Bluetooth Traffic Monitoring System with Loop Detector Data for Improved Freeway Traffic Speed Estimation. J. Intell. Transp. Syst. 2012, 17, 152–164. [Google Scholar] [CrossRef]
- Manering, F.; Bullock, D.M. Analysis of Freeway Travel Time Variability Using Bluetooth Detection. J. Transp. Eng. 2011, 137, 697–704. [Google Scholar]
- Akanni, A.O.; Odepian, K. Comparative Analysis of Propagation Pathloss and Channel Power of VHF and UHF Wireless Signals in Urban Environment. Int. J. Res. Innov. Appl. Sci. 2019, IV. [Google Scholar]
- Mardeni, R.; Pey, L.Y. The Optimization of Okumura’s Model for Code Division Multiple Access (CDMA) System in Malaysia. Eur. J. Sci. Res. 2010, 45, 508–528. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chiva, I.-C.; Minea, M.; Minea, V.-L.; Semenescu, A. Anonymous Detection of Traveler Flows Employing Bluetooth Technologies. Proceedings 2020, 63, 61. https://doi.org/10.3390/proceedings2020063061
Chiva I-C, Minea M, Minea V-L, Semenescu A. Anonymous Detection of Traveler Flows Employing Bluetooth Technologies. Proceedings. 2020; 63(1):61. https://doi.org/10.3390/proceedings2020063061
Chicago/Turabian StyleChiva, Ionuț-Cosmin, Marius Minea, Viviana-Laetitia Minea, and Augustin Semenescu. 2020. "Anonymous Detection of Traveler Flows Employing Bluetooth Technologies" Proceedings 63, no. 1: 61. https://doi.org/10.3390/proceedings2020063061
APA StyleChiva, I.-C., Minea, M., Minea, V.-L., & Semenescu, A. (2020). Anonymous Detection of Traveler Flows Employing Bluetooth Technologies. Proceedings, 63(1), 61. https://doi.org/10.3390/proceedings2020063061