Robotic Arms with Anthropomorphic Grippers for Robotic Technological Processes †

1
Design, Mechatronics and Environment Department, Transilvania University of Brasov, 500036 Brasov, Romania
2
Technical Sciences Academy of Romania, 030167 Bucharest, Romania
†
Presented at the 14th International Conference on Interdisciplinarity in Engineering—INTER-ENG 2020, Târgu Mureș, Romania, 8–9 October 2020.
Proceedings 2020, 63(1), 77; https://doi.org/10.3390/proceedings2020063077
Published: 28 January 2021
(This article belongs to the Proceedings of The 14th International Conference on Interdisciplinarity in Engineering—INTER-ENG 2020)
Abstract
:The robotic arms of the human arm type, so-called collaborative robots, have been improved, optimized, and diversified greatly in recent years. However, most of them are still equipped with mechanical grippers with plier-like jaws. Equipping these robotic arms with anthropomorphic grippers is currently hampered by variants of these grippers on the market that are far too complex and at inaccessible prices to be used on a large scale. As an alternative to the familiar anthropomorphic grippers, I presented an anthropomorphic gripper with five fingers, made under my coordination, constructive, and functional, including briefly the coupling solution with a robotic arm.
1. Introduction
After the advent of industrial robots in technological processes, for a long time, industrial robots have been and are equipped for parts transfer operations, with mechanical grippers with jaws. These grippers can only be used for one type of parts or a set of similar parts. There are also multi-grippers that can be used for more types of parts. The main disadvantage of these grippers is the limited range of use and the need to change the gripper in the case of another type of part in shape or size [1]. In parallel with the mechanical grippers with jaws, anthropomorphic grippers, similar to the human hand, with three to five fingers, were continuously developed and perfected. Robotic arms similar to the human arm were also developed and perfected, which became compact, precise, and reliable [2,3]. Thus, in the robotic technological processes, the classic industrial robots got to be replaced, as an increasingly obvious trend, with robotic arms/collaborative robots (cobots) equipped with anthropomorphic grippers, fixed or mounted on mobile platforms, to the more complex shape of humanoid robots. In this way, it is possible to replace human operators with these variants of humanoid arms or robots.
This paper presents a unit of robotic arm/ anthropomorphic gripper that can be widely used in the robotization of technological processes for industrial products’ manufacturing.
2. Types of Collaborative Robotic Arms
In the industrial robot, the robotic arm had from the beginning as a model the human arm, with the mention that the initial variants of industrial robots had large dimensions and some disproportions compared to the human arm. Anatomically and cinematically, the human arm represented in Figure 1 is characterized by several elements and seven independent movements (in xyz coordinate axis): three rotations in the shoulder (ω1; ω2; ω3), one rotation in the elbow (ω4), one rotation around the forearm (ω5), and two rotations at the wrist level (ω6; ω7).
As we have already mentioned, the first variants of industrial robots only tried to copy the structure and kinematics of the human hand, a direction in which they were partially successful. However, in the last 10–15 years, robotic arm structures have appeared that are much more similar to the human arm and have comparable performance. Some of these variants will be presented (for each variant the independent movements are highlighted: ω1, …, ω7, corresponding to the number of degrees of freedom, an original contribution of this paper, useful for the easier understanding of the operation of these robots). The Barrett Arm (Figure 2a) has been made since the early 2000s and is particularly accurate. The main features of this robotic arm are a height of 42 cm, length of 72 cm, width of 34 cm, weight 27 of kg, high speed, and very good accuracy [4]. Figure 2b shows the Universal Robot UR 10 robotic arm. Its main features are: it safely works alongside employees or separately; it automates tasks up to 22 lbs (10 kg); its reach radius is up to 51.2 in (1300 mm); it has 360-degree rotation on each wrist joint, 6-axis capability, and 0.1 mm repeatability; and it is lightweight and mountable at only 24.3 lbs and easily programmed to switch tasks [5].
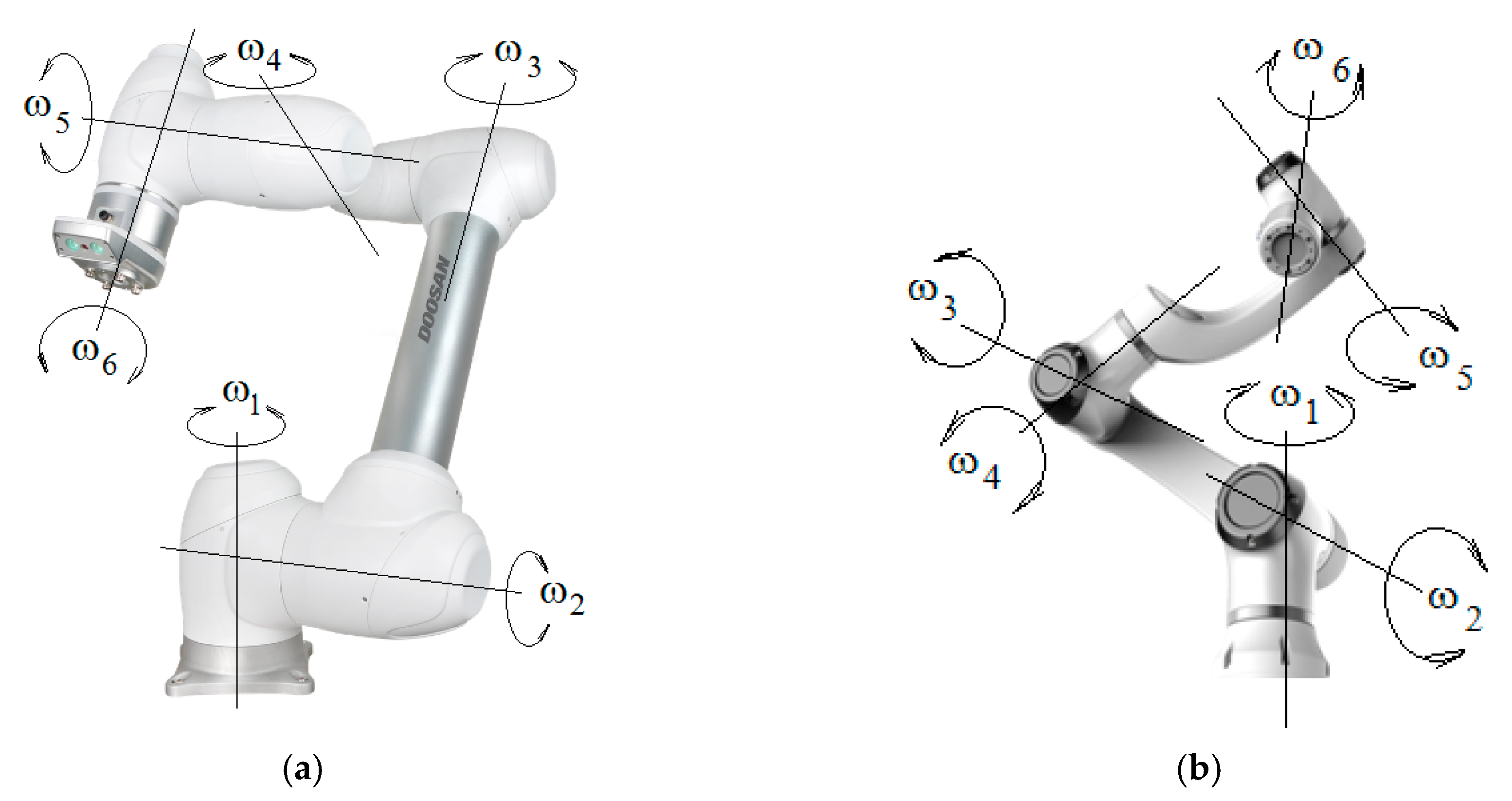
Doosan M 1013 Robotic Arm (Figure 3a) is characterized by: degrees of freedom: 6; payload: 10 kg; reach: 1300 mm; tool speed: 1 m/s; repeatability: ±0.1 mm; operating temperature: 5–45 °C; weight: 33 kg; installation position: floor, ceiling, and walls; protection rating: IP54, I/O; ports: configured with 6 I/Os; and power supply: 24 V/Max. 3 A, joint movement (range/speed): J1; J2: ±360°/120°/s; J3: ±160°/180°/s; J4, J5, J6: ±360°/225°/s [6]. Figure 3b shows the robotic arm type Elfin, which has the following features: control mode: continuous path control; drive mode: electric; application loading, pick and place, condition: new; CE certification; trademark: Han’s Robot [7].
Another variant of robotic arm of this type is ROZUM Robotics (Figure 4a) characterized by being ultra-lightweight and mobile (8 kg weight), strong and dexterous (3 kg payload, 700 mm reach), precise (±0.1 mm repeatability), and fast (30 rpm/2 m/s) [8]. The KUKA robotic arm (Figure 4b), made after a long period of improvement and optimization of KUKA classic robots, in which we can also remark upon the great difference between the traditional industrial robots and articulated robotic arms of the last generation, is characterized by a 7-DOF robotic arm and adaptation algorithms; the robot is equipped with torque sensors, allowing us to perform torque control and by extension impedance control, allowing for compliant interaction and motion-adaptation [9].
The Rebel Arm 1–2 robotic arm (Figure 5a) is characterized by 6 DOF, with integrated control system and motor; an outer chassis that consists entirely of polymers and is therefore cost-effective and light; an articulated arm that enables applications involving human–machine collaboration; lightweight, internal cables; joints that are suitable for service robotics applications; and brushless DC motors instead of stepper motors [10]. The Panda robotic arm (Figure 5b) is characterized by a easy-to-program robotic arm designed for small businesses and ability to move in seven axes, designed with a smart sense of “touch”; the Panda can help conduct science experiments, build circuit boards, or pretest equipment (two Panda arms can even work together to build a third) [11].
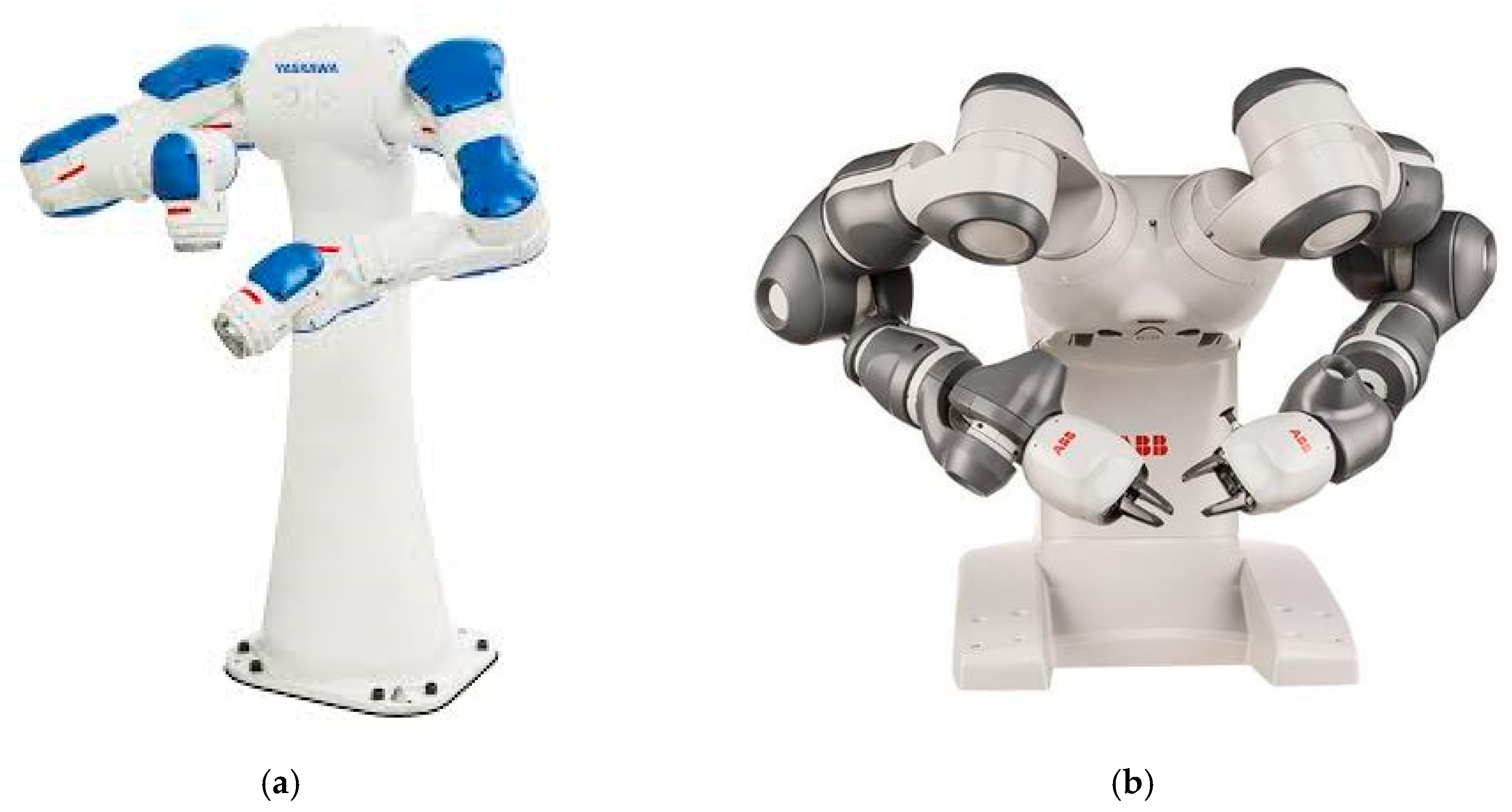
All types of robotic arms presented are part of the so-called class of collaborative robots designed to interact in a friendly manner and very efficiently with the human operator. These robotic arms typically have six or more degrees of mobility and can be used individually or in pairs, as human arms. Two examples are given for illustration of the structure equipped with two robot arms each (Figure 6a,b).
In most cases, these robotic arms, used individually or in pairs, have been equipped and are still equipped, as already mentioned, on a large scale with grippers with jaws, pliers, or sporadically with articulated finger grippers (3, 4, or 5 fingers). This situation is explained by the still low performance and affordable variants of anthropomorphic finger grippers.
3. Solving the Direct Kinematic Problem with the Method of Homogeneous Operators
A problem of particular importance for robotic arms of the human arm type is the solution of direct kinematics. The following is a brief example of solving direct kinematics for a robot of this type, for which the method of homogeneous operators is applied [14,15]. This method application involves the use of homogeneous operators of rotation, translation, and rotation–translation compound operators, respectively, for translation–rotation. In Figure 7a, we show the form of the homogeneous elementary translation operator of the reference system to the reference system , by the axis = :
In the same form, the matrix of elementary homogeneous rotation operators by x-axis, y-axis, and z-axis, according to Figure 7b–d, are:
In these matrices, Snm = sin and Cnm = cos are sines, respectively, cosines of rotation angles. Rotation is around the respective axes, from the reference system m to the reference system n. If we use two elementary homogeneous rotation and translation operators, translation and rotation ones, respectively, we can obtain compound homogeneous operators corresponding to matrices resulted by multiplying the matrices corresponding to homogeneous elementary operators. Compounds operators ease, to some extent, the kinematic calculation, by reducing the number of operations of multiplication of the matrices corresponding to rotations around axes in kinematic couplings and translations between the two axes of two successive couplings. Below, we exemplify the direct kinematic problem solving for the kinematic structure with 6 axes (0,1,2,3,4,5) analyzed and represented in Figure 8.
To obtain the reference system coordinates O5x5y5z5 reported to the reference system O0x0y0z0 (the direct kinematics problem), we write matrix forms of the rotation or translation operators of successive passage from the reference system m to the reference system n: m = 0, 1, 2, 3, 4, 5; n = 0, 1, ..., 5. The matrix of the reference system coordinates O5x5y5z5, as compared to the reference system O0x0y0z0, which is a product of the transfer matrices above matrix, under the form:
A05 = A01′A1′1A12′A2′2A23′A3′3A34′A4′4A45,
The kinematic analysis presented may be extrapolated to any other structure of the robotic arm type human arm.
4. Five-Finger Anthropomorphic Gripper for Robotic Arms
Furthermore, I describe an anthropomorphic five-finger gripper, designed under the coordination of the author, with a high degree of resemblance to the human hand made under my coordination, a type of gripper that is recommended to be used to equip the robotic arms described above. Figure 9 shows such a robotic arm and the gripper that will be mounted on it, real variant and the CAD model [16].
This gripper, according to Figure 10a, has five degrees of mobility and is driven by five stepper motors (Figure 10b). The implementation of the gripper is being carried out, having solved the first part of the problem by ensuring the compatibility between the robot and the gripper.
An example of use is the simulation of a mounting and transfer operation of a metal shaft. According to Figure 11a,b, a bearing is mounted on a shaft.
After mounting, the shaft is taken and stored in a box on a suitable support (Figure 12).
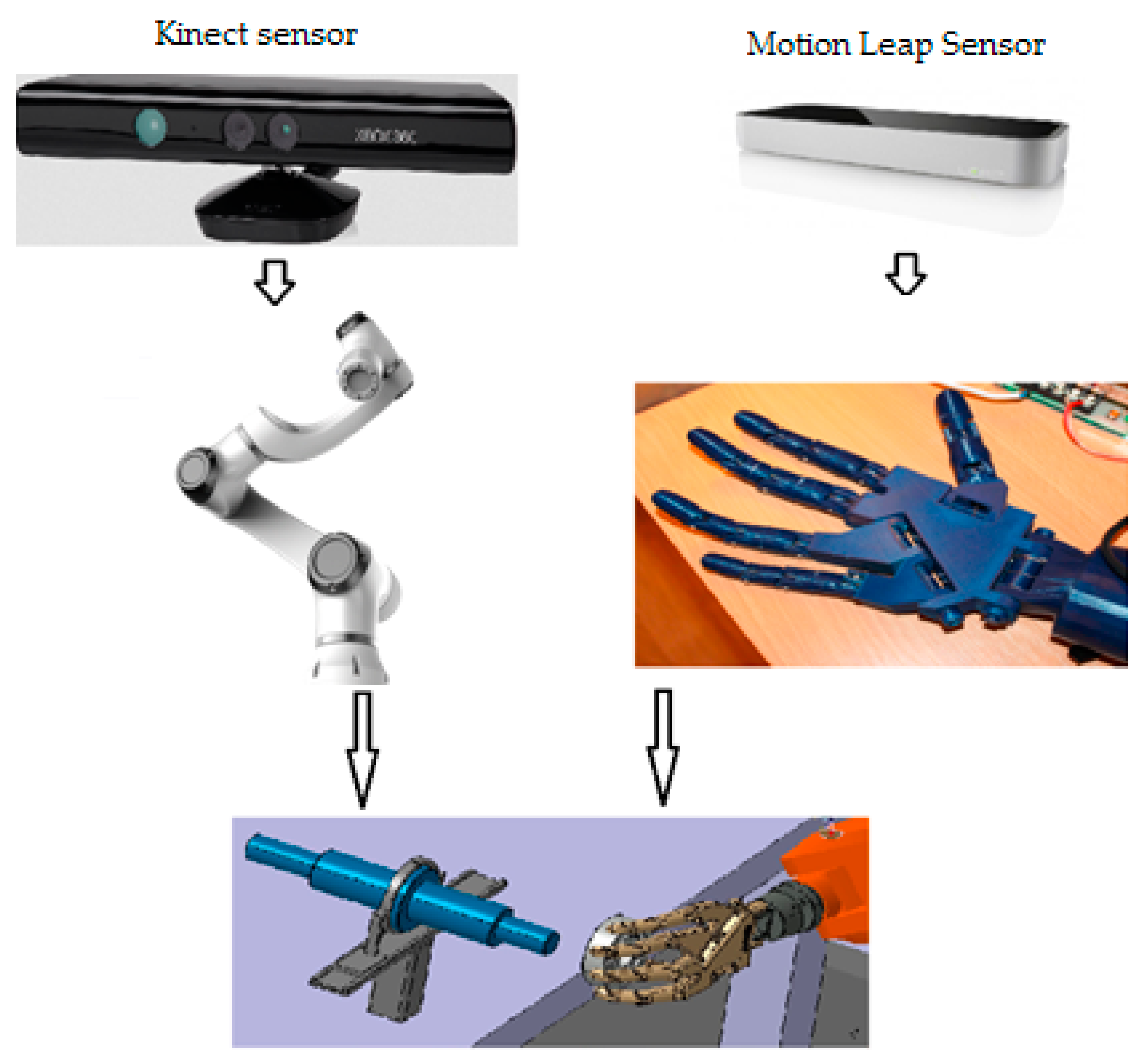
The robotic workstation can be optimized by using a Kinect sensor, which takes over the movements of a human arm and transmits them to the robotic arm, the anthropomorphic gripper being configured to grip various parts using a Motion Leap sensor (Figure 13).
The presentation of this solution seeks to encourage the widespread use of robotic arms equipped with anthropomorphic grippers with five fingers of average complexity achievable at low cost, which really contributes to the quasi-total robotization of technological processes of manufacture and assembly.
5. Conclusions
Based on what is presented in this paper, the following conclusions can be drawn:
- Human arm type robotic arms, also called collaborative robots or cobots if their shapes are more complex, have greatly improved and diversified in recent times; even one of the big companies brought to market industrial robots and such structures.
- These robotic arms, more efficient than the robotic arms from the traditional industrial robots, are further equipped especially with jaw grippers of the pliers type that do not highlight all their constructive and operational possibilities.
- The maximum efficiency of collaborative robotic arms use can be achieved by equipping them with anthropomorphic grippers, still difficult to access because of high costs, and a sometimes unnecessary complexity;
- As an alternative to the familiar anthropomorphic gripper, to equip robotic arms, I briefly present an anthropomorphic gripper with five fingers, sufficiently advanced and feasible at a lower cost, made under my supervision, including a solution for coupling a robotic arm, and exemplification of use in the case of assembly and transfer operations; this is a solution that has advantages in terms of cost and operation for current applications compared to other very expensive and unjustifiably complex anthropomorphic grippers.
References
- Staretu, I. Gripping Systems; Derc Publishing House: Tewksbury, MA, USA, 2011. [Google Scholar]
- El Zaatari, S.; Marei, M.; Li, W.; Usman, Z. Cobot programming for collaborative industrial tasks: An overview. Rob. Auton. Syst. 2019, 116, 162–180. [Google Scholar] [CrossRef]
- Schou, C.; Andersen, R.S.; Chrysostomou, D.; Bøgh, S.; Madsen, O. Skill-based instruction of collaborative robots in industrial settings. Robot. Comput. Integr. Manuf. 2018, 53, 72–80. [Google Scholar] [CrossRef]
- Robots Your Guide to the World of Robotics. Available online: https://robots.ieee.org/robots/wam/ (accessed on 24 April 2020).
- Automation Distribution! Available online: https://automationdistribution.com/universal-robots-ur10-collaborative-industrial-robot-arm/ (accessed on 26 April 2020).
- Generation Robots. Available online: https://www.generationrobots.com/en/403413-doosan-m1013-robotic-arm.html (accessed on 20 April 2020).
- Made-in-China. Available online: https://www.made-in-china.com/showroom/hansrobot/product–detailoCKEAfvTEScF/China-6-Axis-Universal-Robot-for-Pick-and-Place-Competitor-Price.html (accessed on 20 April 2020).
- ROZUM ROBOTICS. Available online: https://www.f6s.com/rozumrobotics (accessed on 26 April 2020).
- Laurens, A.; Khoramshahi, M.; Billard, A. Adaptive Human-Robot Interaction: From Human Intention to Motion Adaptation Using Parameterized Dynamical Systems; Technical Report; Ecole Polytechnique Federal de Lausanne: Lausanne, Switzerland, 2018. [Google Scholar]
- IGUS Plastics for Longer Life. Available online: https://www.igus.ro/info/news-2018-20852 (accessed on 24 April 2020).
- TIME-BEST INVETION 2018. Available online: https://time.com/collection/best-inventions-2018/5454734/panda/ (accessed on 24 April 2020).
- YASKAWA. Available online: https://www.yaskawa.eu.com/products/robots (accessed on 20 June 2020).
- ABB. Available online: https://new.abb.com/products/robotics/industrial-robots/irb-14000-yumi (accessed on 20 June 2020).
- Dudita, F.; Diaconescu, D.; Gogu, G. Linkages Mechanisms (in Romanian); Editura Tehnica: Bucharest, Romania, 1989. [Google Scholar]
- Staretu, I. The Structure, Work Space and Direct Kinematic of the Robots with 8 Axes of Type T Normal R Parallel (PM) (OM). Appl. Mech. Mater. 2014, 658, 718–723. [Google Scholar] [CrossRef]
- Moldovan, C. Theoretical and Experimental Researches Regarding the Diversification of a Virtual Hand Interaction with Objects from a Virtual World with Applications in Industrial Engineering (in Romanian). Ph.D. Thesis, Transilvania University of Brasov, Brasov, Romania, 2014. [Google Scholar]
Figure 1.
Anatomically and cinematically the human arm.

Figure 2.
Collaborative robots: (a) WAM Barrett robotic arm; (b) Universal Robot UR 10 robotic arm.
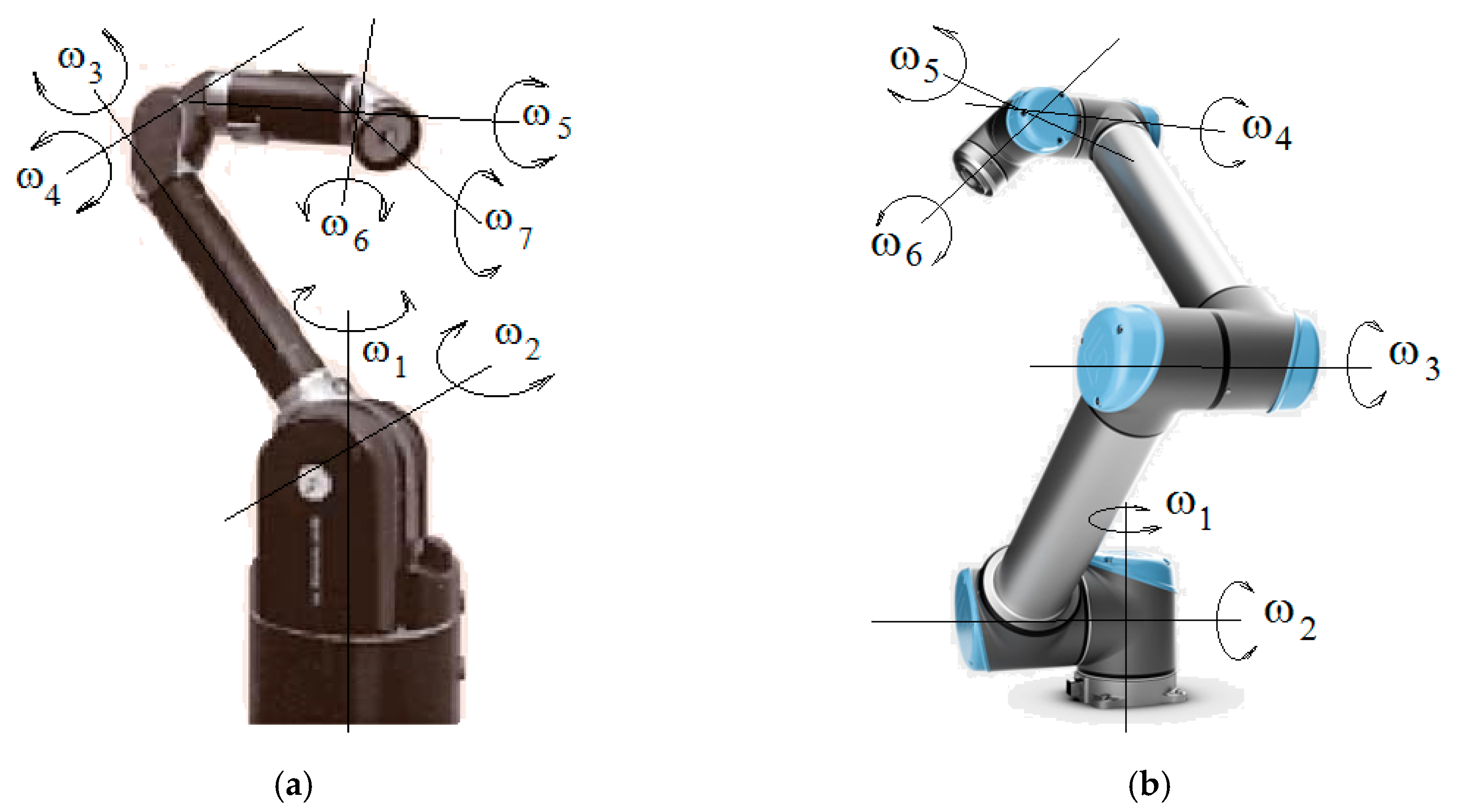
Figure 3.
Collaborative robots: (a) Doosan M 1013 Robotic Arm; (b) Elfin Robotic Arm.

Figure 4.
Collaborative robots: (a) ROZUM robotic arm; (b) KUKA robotic arm.
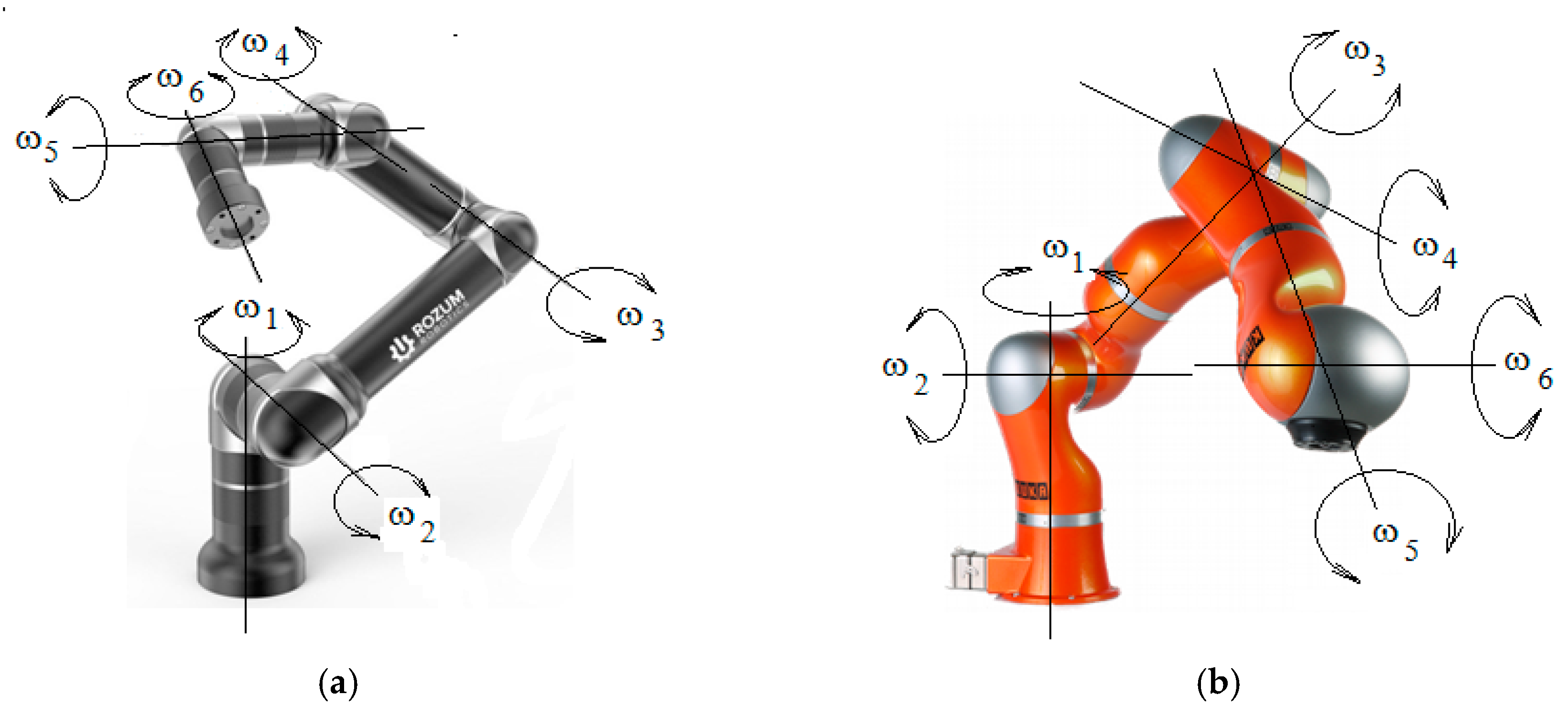
Figure 5.
Collaborative robots: (a) Rabel robotic arm; (b) Panda robotic arm.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 7.
Appropriate kinematic schemes for homogeneous elementary operators: (a) translation; (b) rotation by x axis; (c) rotation by y axis; (d) rotation by z axis.
Figure 7.
Appropriate kinematic schemes for homogeneous elementary operators: (a) translation; (b) rotation by x axis; (c) rotation by y axis; (d) rotation by z axis.

Figure 8.
The necessary notations for solving the direct kinematics with the method of homogeneous operators.
Figure 8.
The necessary notations for solving the direct kinematics with the method of homogeneous operators.

Figure 9.
Recommendation for coupling a human arm robot with an anthropomorphic five-finger grip.
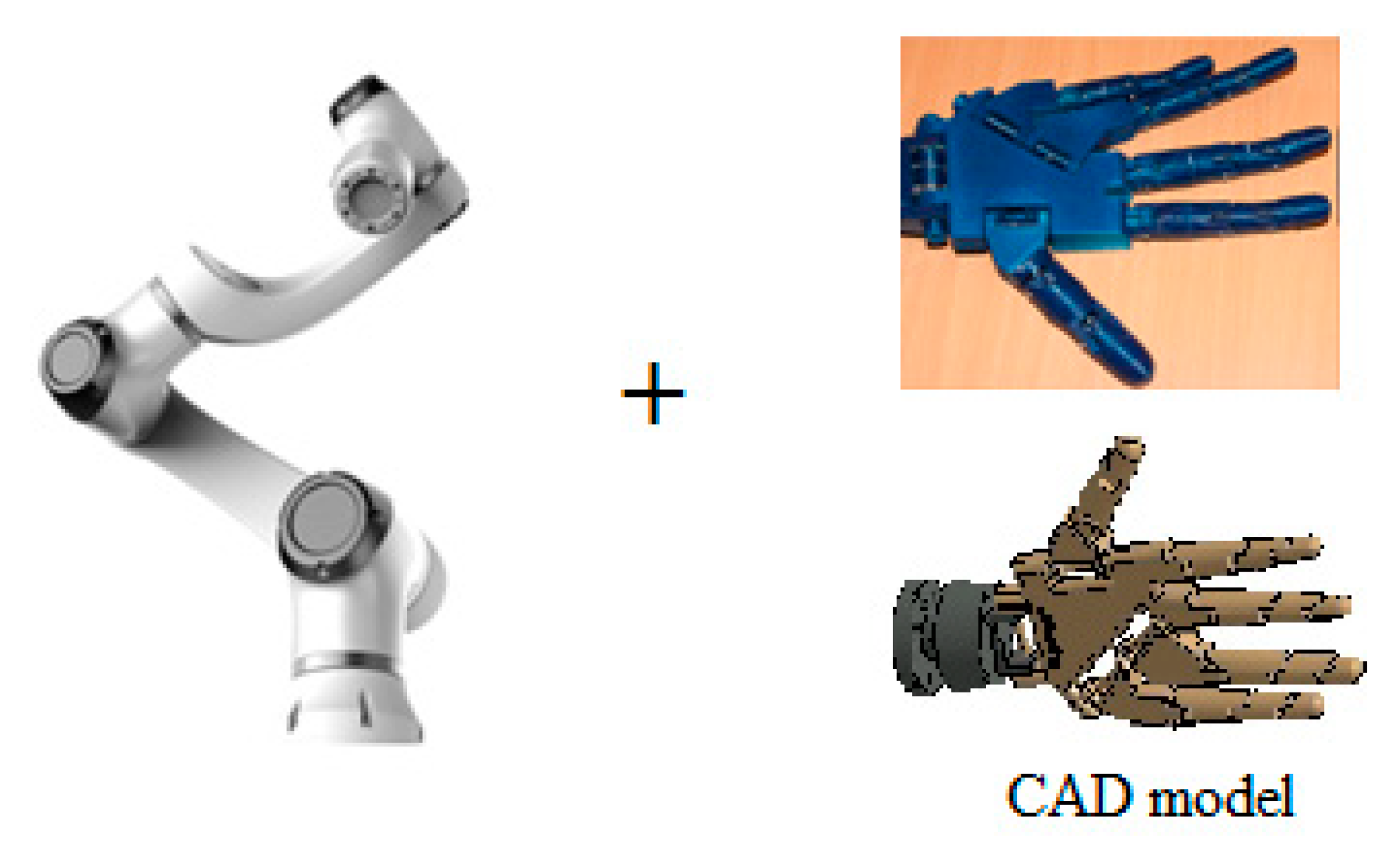
Figure 10.
Anthropomorphic gripper with five fingers: (a) Constructive version; (b) The stepper motors.
Figure 10.
Anthropomorphic gripper with five fingers: (a) Constructive version; (b) The stepper motors.

Figure 11.
Simulation operations: (a) A bearing is mounted on a shaft; (b) Transfer operation.

Figure 12.
The shaft is stored in a box.

Figure 13.
Control solution for the robotic structure with robotic arm and anthropomorphic finger grip.
Figure 13.
Control solution for the robotic structure with robotic arm and anthropomorphic finger grip.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Staretu, I. Robotic Arms with Anthropomorphic Grippers for Robotic Technological Processes. Proceedings 2020, 63, 77. https://doi.org/10.3390/proceedings2020063077
AMA Style
Staretu I. Robotic Arms with Anthropomorphic Grippers for Robotic Technological Processes. Proceedings. 2020; 63(1):77. https://doi.org/10.3390/proceedings2020063077
Chicago/Turabian StyleStaretu, Ionel. 2020. "Robotic Arms with Anthropomorphic Grippers for Robotic Technological Processes" Proceedings 63, no. 1: 77. https://doi.org/10.3390/proceedings2020063077