Accuracy Assessment of 3D Photogrammetric Models from an Unmanned Aerial Vehicle

 ,
,  ,
, 
 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- the angle formed between the homologous rays in the different shots; generally, the greater this angle (within a certain interval), the greater the achievable accuracy, as Krauss studies show a direct proportionality between the base/height ratio and accuracy [37];
- the measurement of ground control points (GCPs); for the same number, the measurement accuracy of GCPs is directly proportional to the accuracy of the photogrammetric model [10].
2. Case Study and Data Acquisition
2.1. The Roman Amphitheatre of Avella (Italy)
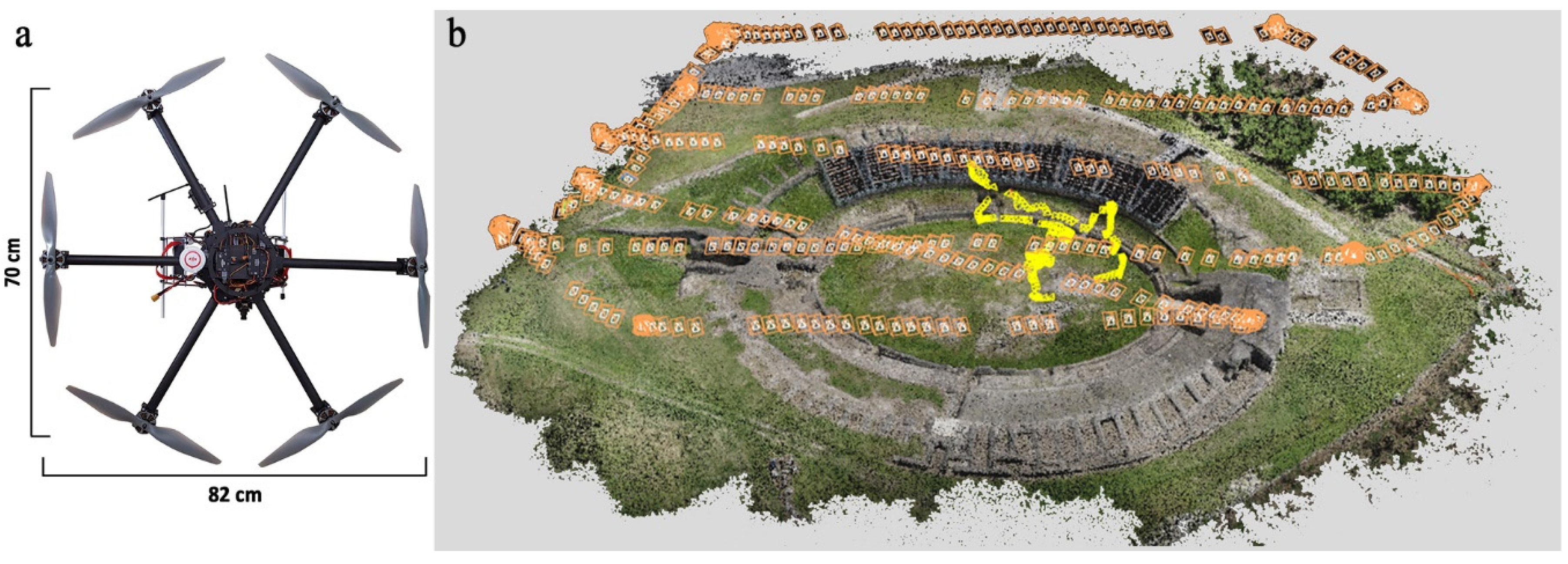
2.2. UAV Photogrammetric Flight
- a frame in carbon and fiberglass with six arms;six brushless motors 740 kV with and propellers 14 5 cm;six electronic speed controller circuits (ESCs) FullPower 40 A, that adjust the speed of rotation of motors;
- flight control (FC) DJI Wookong;
- remote control Graupner MX16 2.4 GHz (RC) that allows the gimbal control and the rotation of the camera along of the three axes;
- remote control Futaba 2.4 GHz S-FHSS that allows the driving of the vehicle, activates the different flight modes in remotely mode, sets and/or locks the flight height measured by the altimeter;
- three-axis Gimbal with brushless motors of the type iPower Motor GMB4008-150t, a servo-assisted support characterized by greater fluidity in the movements.
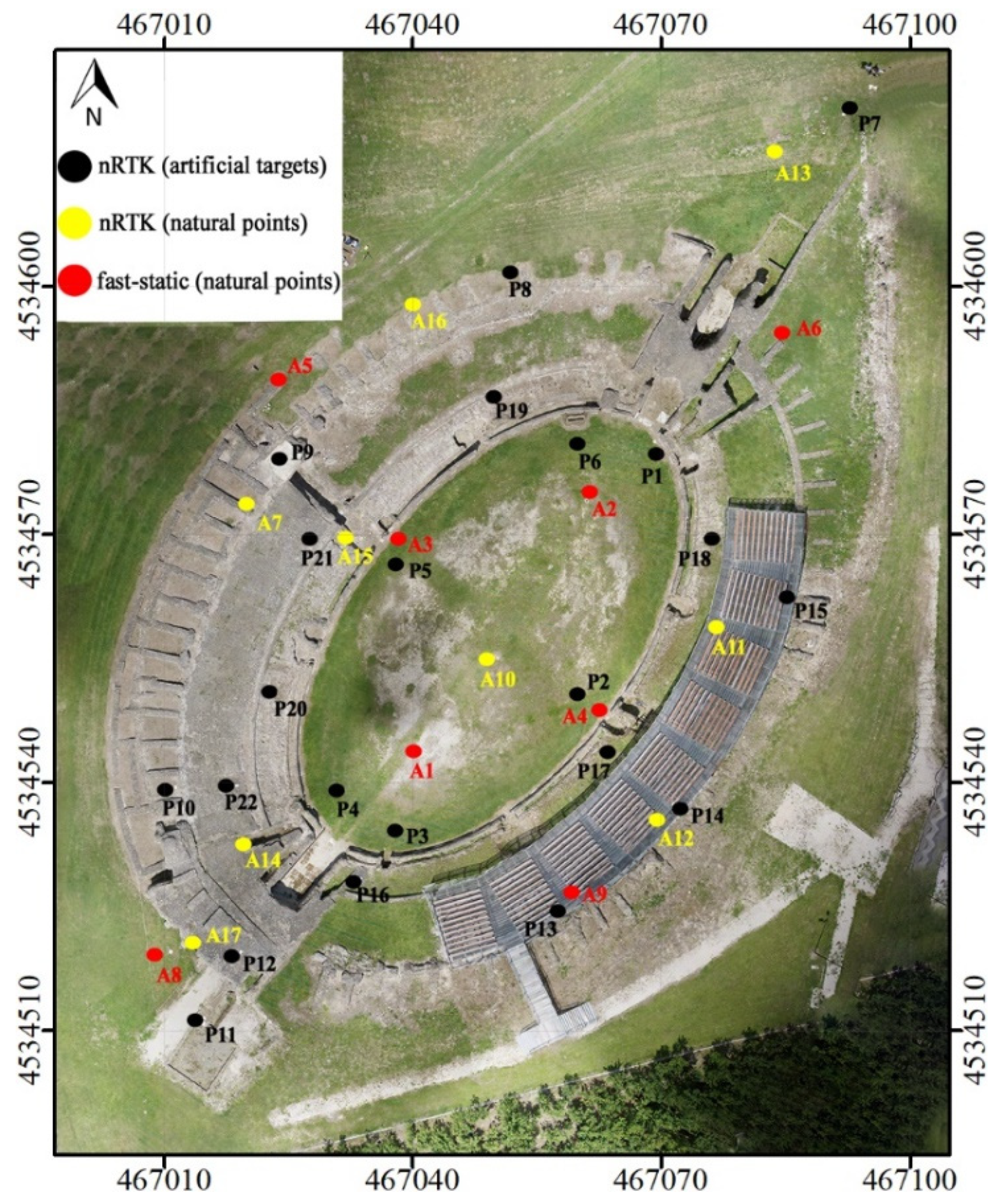
2.3. GCPs Acquisition
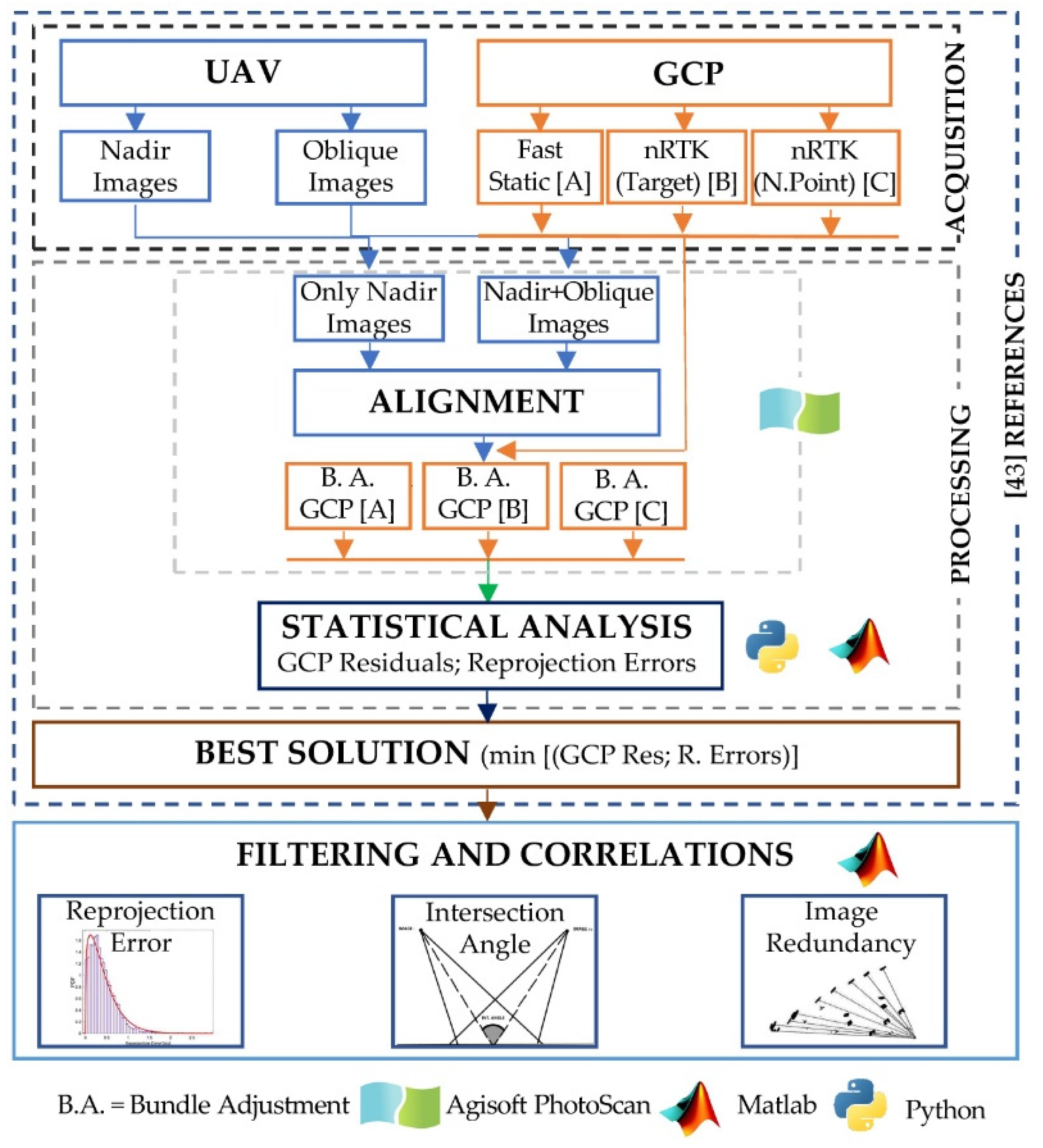
3. Methods
- only nadir images;
- both nadir and oblique images.
- the residual on the image coordinates, also called ‘reprojection errors’, computed in the georeferencing phase, starting with the result of the adjustment of the GNSS measurements; they represent the accuracy of the computation of each tie point belonging to the sparse cloud;
- the angle between the homologous rays of all tie points for each pair of images and the average of the angle values;
- the number of images (image count) used to estimate the position of each tie point.
3.1. Data Elaboration
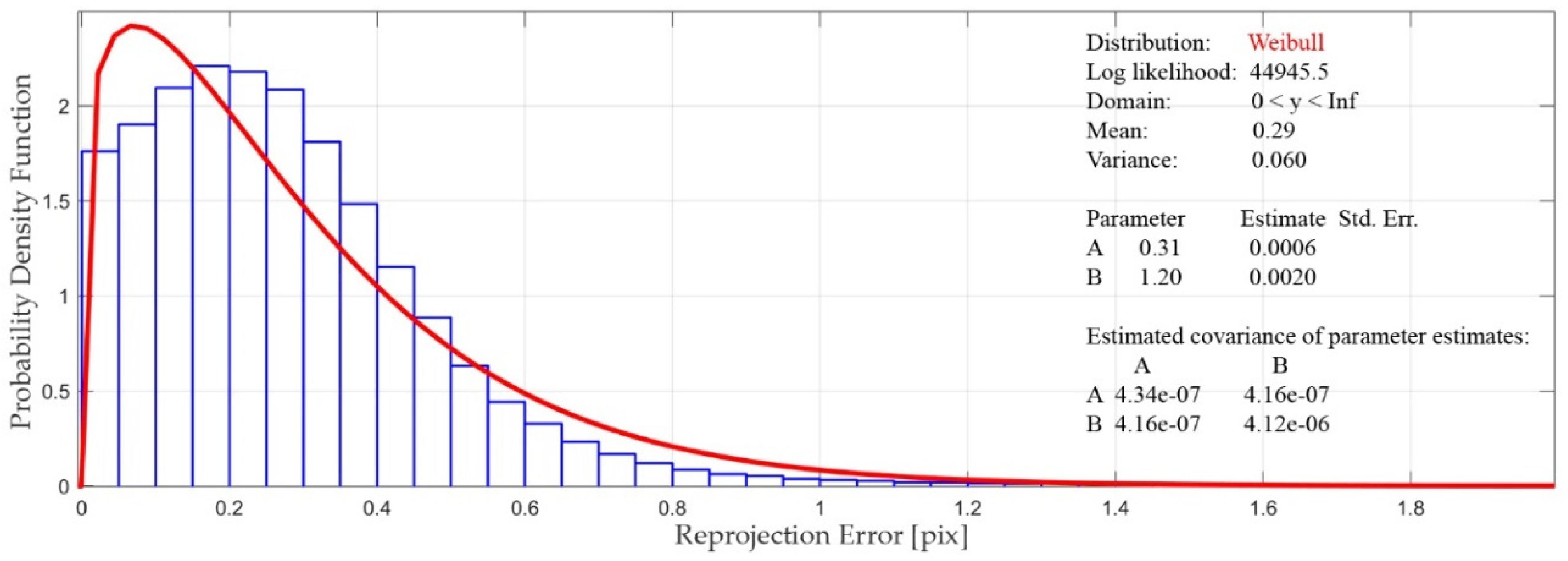
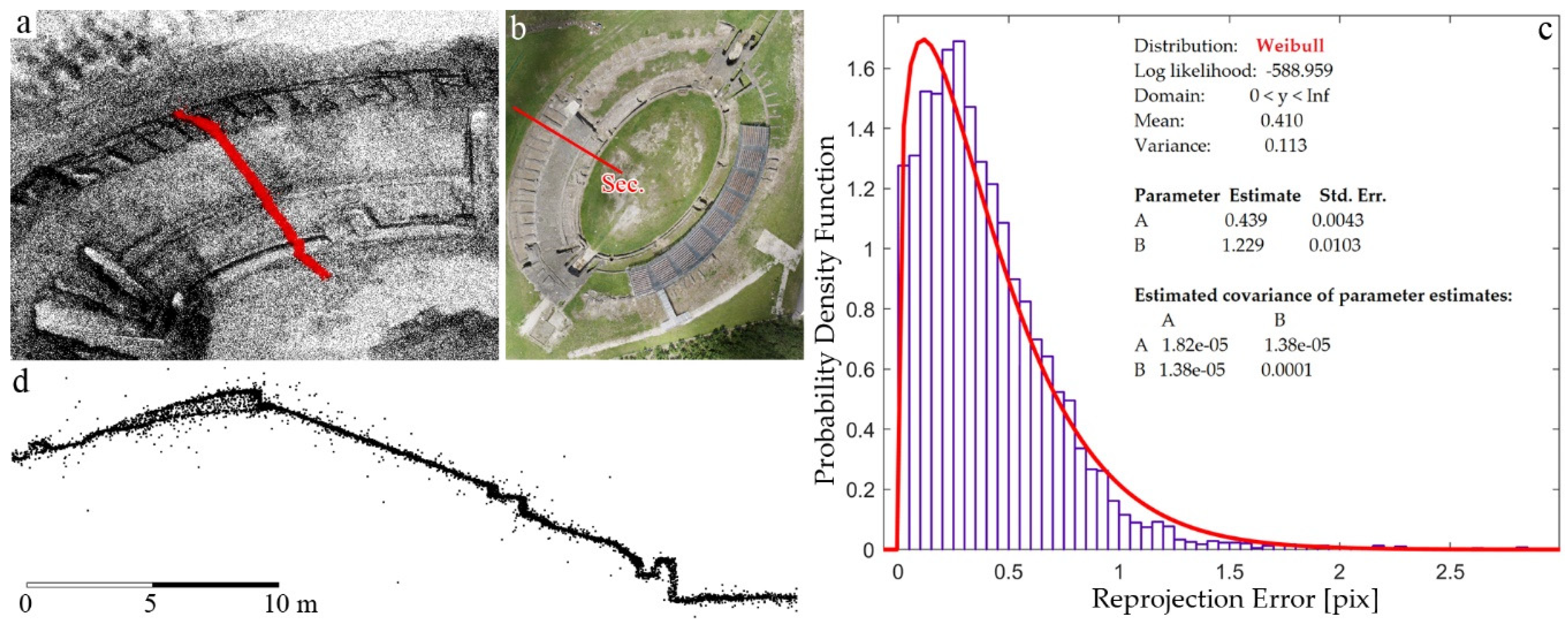
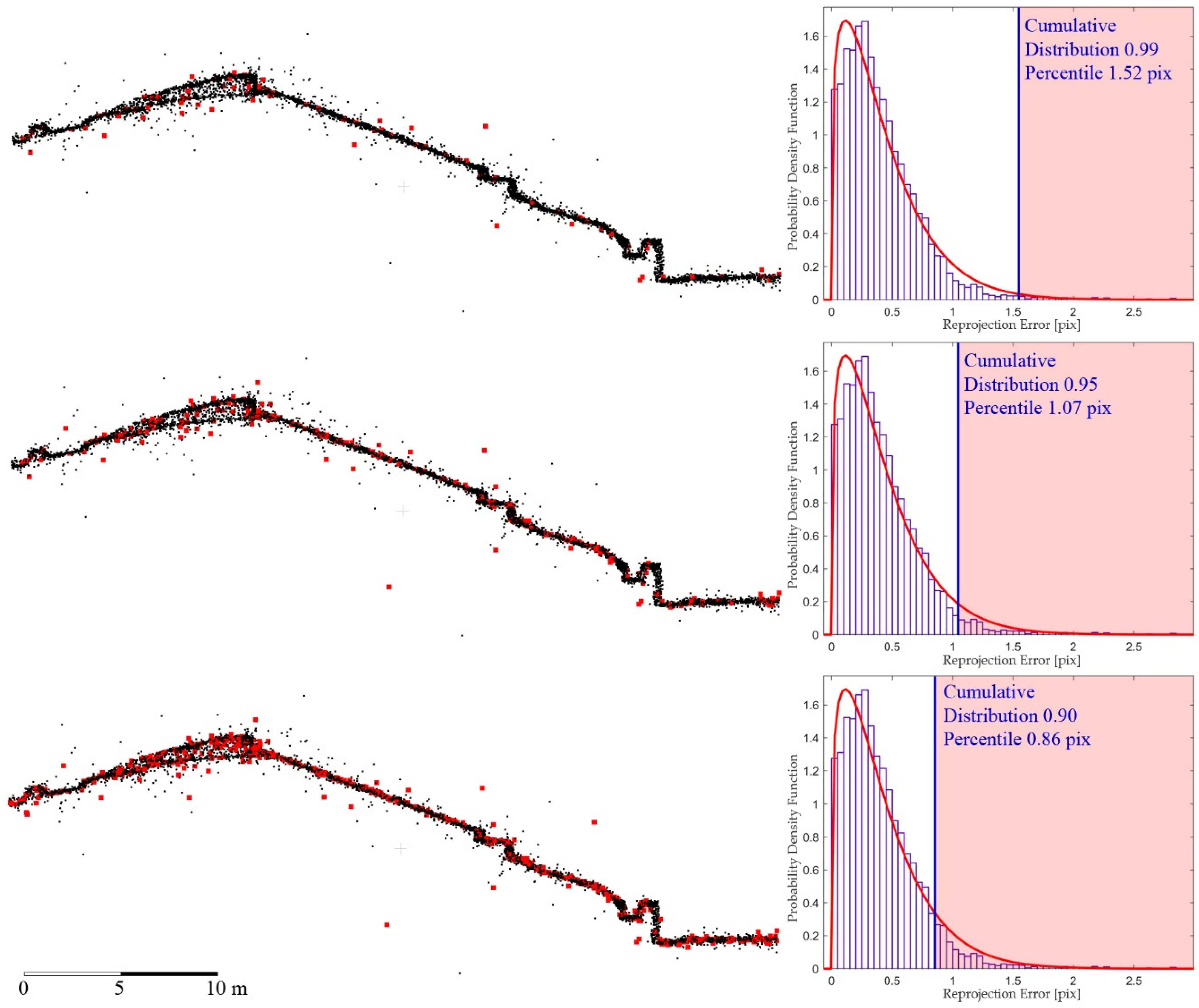
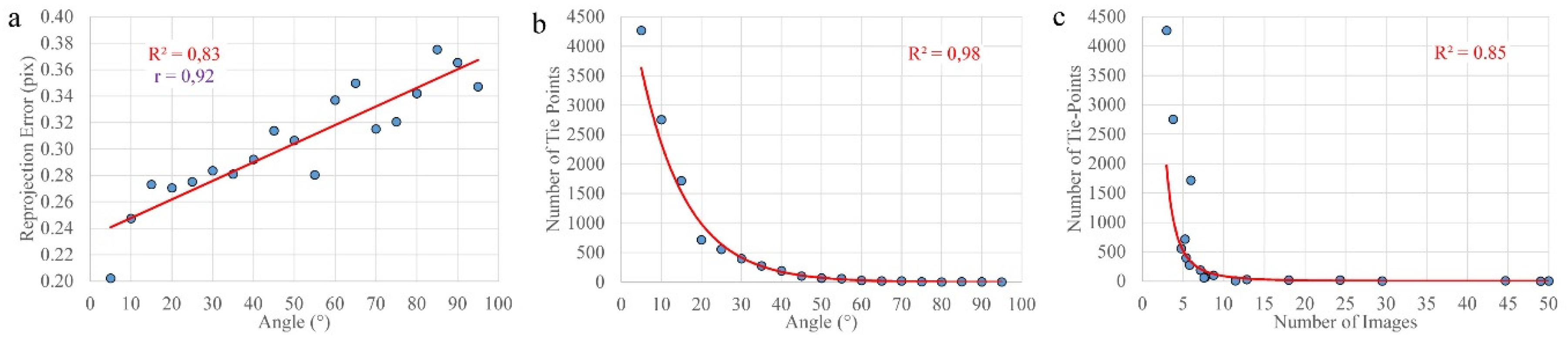
3.2. Reprojection Error
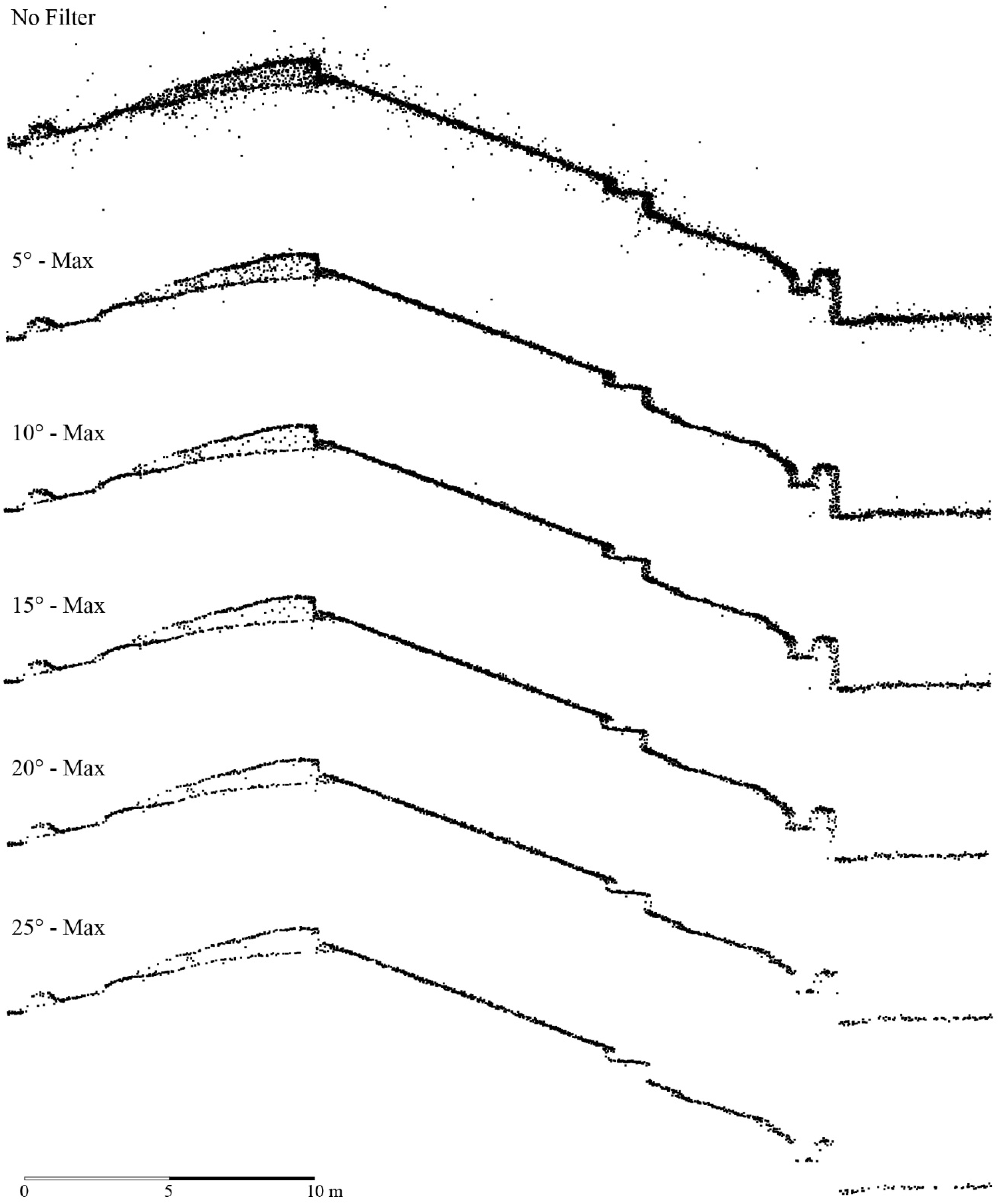
3.3. Angle Between Homologous Points
- projection centre (O);
- tie point (k).
4. Result and Discussion
4.1. Results of the GNSS Survey
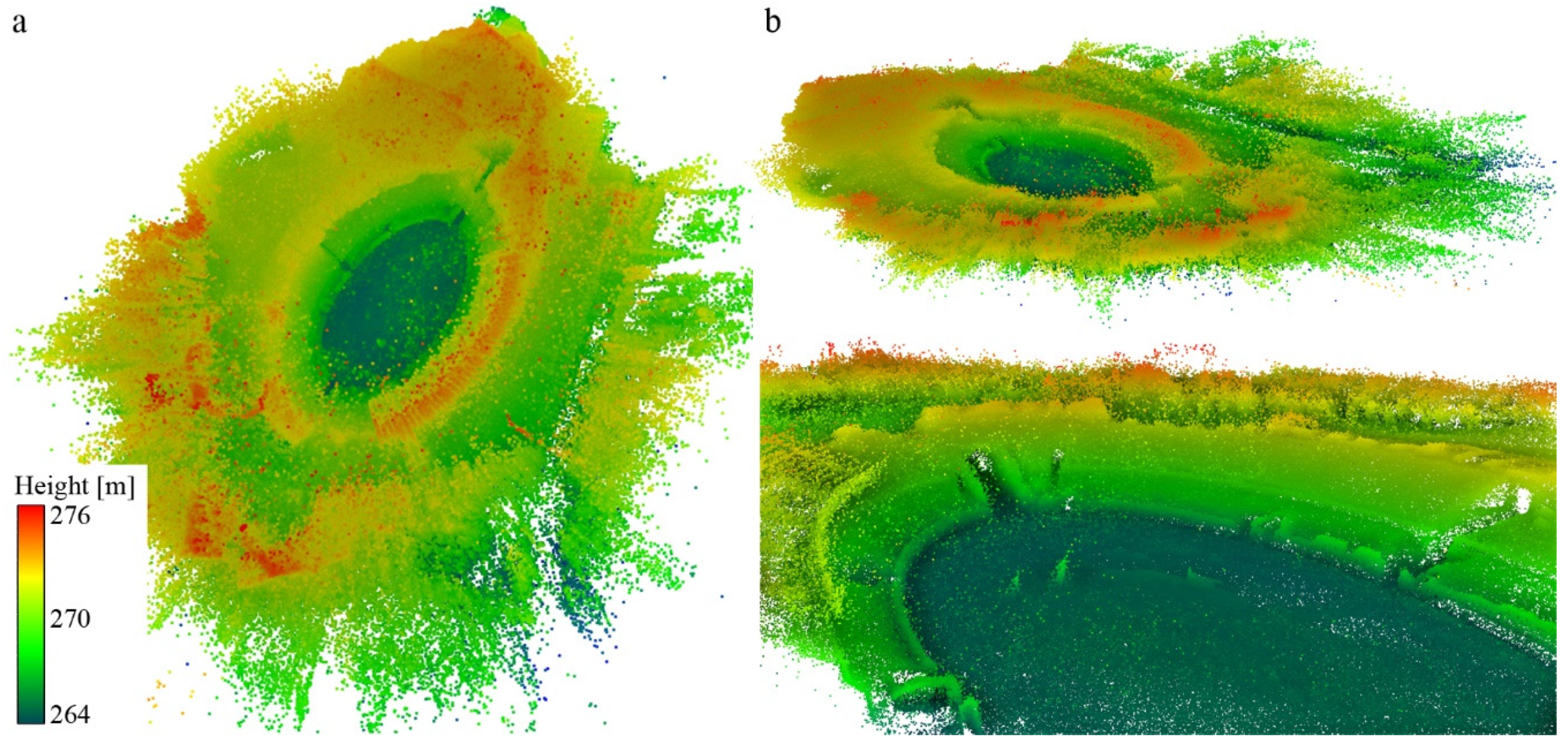
4.2. Building of the Sparse Point Cloud
4.3. Reprojection Error
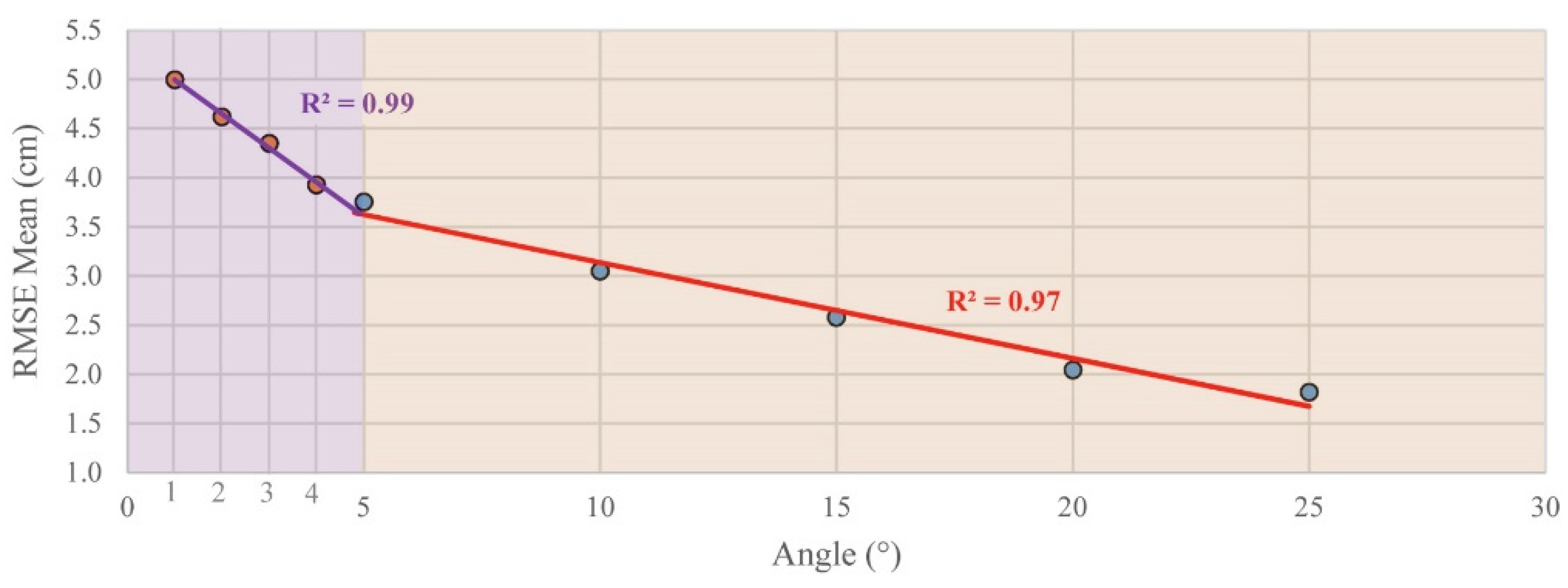
4.4. Analysis of Angle Values between Homologous Rays
4.5. Correlation Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Falkingham, P.L. Acquisition of high resolution three-dimensional models using free, open-source, photogrammetric software. Palaeontol. Electron. 2011, 15, 1–15. [Google Scholar] [CrossRef]
- Baltsavias, E.P. A comparison between photogrammetry and laser scanning. Isprs J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Barba, S.; Barbarella, M.; Di Benedetto, A.; Fiani, M.; Limongiello, M. Comparison of UAVs performance for a Roman Amphitheatre survey: The case of Avella (Italy). In Proceedings of the 2nd International Conference of Geomatics and Restoration (Volume XLII-2/W11), Milan, Italy, 8–10 May 2019; pp. 179–186. [Google Scholar]
- Rinaudo, F.; Chiabrando, F.; Lingua, A.; Spanò, A. Archaeological site monitoring: UAV photogrammetry can be an answer. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B5, 583–588. [Google Scholar] [CrossRef]
- Pflimlin, J.M.; Soueres, P.; Hamel, T. Hovering flight stabilization in wind gusts for ducted fan UAV. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No.04CH37601), Nassau, Bahamas, 14–17 December 2004; pp. 3491–3496. [Google Scholar]
- Zongjian, L. UAV for mapping—low altitude photogrammetric survey. Int. Arch. Photogramm. Remote Sens. Beijingchina 2008, 37, 1183–1186. [Google Scholar]
- Eisenbeiß, H. UAV Photogrammetry. Ph.D. Thesis, Institut für Geodesie und Photogrammetrie, ETH-Zürich, Zürich, Switzerland, 2009. [Google Scholar]
- Rossi, P.; Mancini, F.; Dubbini, M.; Mazzone, F.; Capra, A. Combining nadir and oblique UAV imagery to reconstruct quarry topography: Methodology and feasibility analysis. Eur. J. Remote Sens. 2017, 50, 211–221. [Google Scholar] [CrossRef]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV photogrammetry for mapping and 3D modeling – current status and future perspectives. Isprs - Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-1-C22, 25–31. [Google Scholar] [CrossRef]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Measurement 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Rossi, G.; Tanteri, L.; Tofani, V.; Vannocci, P.; Moretti, S.; Casagli, N. Multitemporal UAV surveys for landslide mapping and characterization. Landslides 2018, 15, 1045–1052. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. UAV Remote Sensing for Urban Vegetation Mapping Using Random Forest and Texture Analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef]
- Honkavaara, E.; Saari, H.; Kaivosoja, J.; Pölönen, I.; Hakala, T.; Litkey, P.; Mäkynen, J.; Pesonen, L. Processing and Assessment of Spectrometric, Stereoscopic Imagery Collected Using a Lightweight UAV Spectral Camera for Precision Agriculture. Remote Sens. 2013, 5, 5006–5039. [Google Scholar] [CrossRef]
- Quaritsch, M.; Kruggl, K.; Wischounig-Strucl, D.; Bhattacharya, S.; Shah, M.; Rinner, B. Networked UAVs as aerial sensor network for disaster management applications. e & i Elektrotechnik Und Inf. 2010, 127, 56–63. [Google Scholar]
- Morgenthal, G.; Hallermann, N.; Kersten, J.; Taraben, J.; Debus, P.; Helmrich, M.; Rodehorst, V. Framework for automated UAS-based structural condition assessment of bridges. Autom. Constr. 2019, 97, 77–95. [Google Scholar] [CrossRef]
- Mualla, Y.; Najjar, A.; Galland, S.; Nicolle, C.; Tchappi, I.H.; Yasar, A.-U.-H.; Främling, K. Between the Megalopolis and the Deep Blue Sky: Challenges of Transport with UAVs in Future Smart Cities. In Proceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems, Montreal QC, Canada, 13–17 May 2019; pp. 1649–1653. [Google Scholar]
- Máthé, K.; Buşoniu, L. Vision and Control for UAVs: A Survey of General Methods and of Inexpensive Platforms for Infrastructure Inspection. Sensors 2015, 15, 14887–14916. [Google Scholar] [CrossRef] [PubMed]
- Themistocleous, K.; Ioannides, M.; Agapiou, A.; Hadjimitsis, D.G. The methodology of documenting cultural heritage sites using photogrammetry, UAV, and 3D printing techniques: The case study of Asinou Church in Cyprus. In Proceedings of the Third International Conference on Remote Sensing and Geoinformation of the Environment, 2015, Paphos, Cyprus, 22 June 2015. [Google Scholar] [CrossRef]
- Fernández-Hernandez, J.; González-Aguilera, D.; Rodríguez-Gonzálvez, P.; Mancera-Taboada, J. Image-Based Modelling from Unmanned Aerial Vehicle (UAV) Photogrammetry: An Effective, Low-Cost Tool for Archaeological Applications. Archaeometry 2015, 57, 128–145. [Google Scholar] [CrossRef]
- Arias, P.; Herráez, J.; Lorenzo, H.; Ordóñez, C. Control of structural problems in cultural heritage monuments using close-range photogrammetry and computer methods. Comput. Struct. 2005, 83, 1754–1766. [Google Scholar] [CrossRef]
- Bendea, H.; Chiabrando, F.; Tonolo, F.G.; Marenchino, D. Mapping of archaeological areas using a low-cost UAV. The Augusta Bagiennorum test site. In Proceedings of XXI International CIPA Symposium, Athens, Greece, 1–6 October 2007. [Google Scholar]
- Brunetaud, X.; Luca, L.D.; Janvier-Badosa, S.; Beck, K.; Al-Mukhtar, M. Application of digital techniques in monument preservation. Eur. J. Environ. Civil. Eng. 2012, 16, 543–556. [Google Scholar] [CrossRef]
- Themistocleous, K. Model reconstruction for 3D vizualization of cultural heritage sites using open data from social media: The case study of Soli, Cyprus. J. Archaeol. Sci. Rep. 2017, 14, 774–781. [Google Scholar] [CrossRef]
- Fiorillo, F.; De Feo, E.; Musmeci, D. The architecture, geometry and representation of the Amphitheatre of Pompeii. In The reasons of Drawing; Gangemi Editore: Rome, Italy, 2016; pp. 1143–1146. [Google Scholar]
- Nocerino, E.; Menna, F.; Remondino, F.; Saleri, R. Accuracy and block deformation analysis in automatic UAV and terrestrial photogrammetry-Lesson learnt. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 2, 203–208. [Google Scholar] [CrossRef]
- Bilis, T.; Kouimtzoglou, T.; Magnisali, M.; Tokmakidis, P. The use of 3D scanning and photogrammetry techniques in the case study of the Roman Theatre of Nikopolis. Surveying, virtual reconstruction and restoration study. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W3, 97–103. [Google Scholar] [CrossRef]
- Verhoeven, G.; Docter, R. The amphitheatre of Carnuntum: Towards a complete 3D model using airborne Structure from Motion and dense image matching. In Proceedings of the 10th International Conference on Archaeological Prospection, Vienna, Austria, 29 May–2 June 2013; Austrian Academy of Sciences: Vienna, Austria; pp. 438–440. [Google Scholar]
- Segales, A.; Gregor, R.; Rodas, J.; Gregor, D.; Toledo, S. Implementation of a low cost UAV for photogrammetry measurement applications. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 926–932. [Google Scholar]
- Templin, T.; Popielarczyk, D.; Kosecki, R. Application of Low-Cost Fixed-Wing UAV for Inland Lakes Shoreline Investigation. Pure Appl. Geophys. 2018, 175, 3263–3283. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- Remondino, F.; Fraser, C. Digital camera calibration methods: Considerations and comparisons. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 266–272. [Google Scholar]
- Cardone, V. Modelli Grafici Dell’architettura e del Territorio; Maggioli Editore: Santarcangelo di Romagna, Italy, 2015. [Google Scholar]
- Kim, S.J.; Jeong, Y.; Park, S.; Ryu, K.; Oh, G. A Survey of Drone use for Entertainment and AVR (Augmented and Virtual Reality). In Augmented Reality and Virtual Reality: Empowering Human, Place and Business; Springer: Berlin, Germany, 2018; pp. 339–352. [Google Scholar]
- Marques, L.; Tenedório, J.A.; Burns, M.; Romão, T.; Birra, F.; Marques, J.; Pires, A. Cultural Heritage 3D Modelling and visualisation within an Augmented Reality Environment, based on Geographic Information Technologies and mobile platforms. Archit. City Environ. 2017, 11, 117–136. [Google Scholar]
- Olalde, K.; García, B.; Seco, A. The Importance of Geometry Combined with New Techniques for Augmented Reality. Procedia Comput. Sci. 2013, 25, 136–143. [Google Scholar] [CrossRef][Green Version]
- Thon, S.; Serena-Allier, D.; Salvetat, C.; Lacotte, F. Flying a drone in a museum: An augmented-reality cultural serious game in Provence. In Proceedings of the 2013 Digital Heritage International Congress (DigitalHeritage), 28 October–1 November 2013; pp. 669–676. [Google Scholar]
- Kraus, K. Photogrammetry: Geometry from Images and Laser Scans; Walter de Gruyter: Berlin, Germay, 20 November 2007. [Google Scholar]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of Unmanned Aerial Vehicle (UAV) and SfM Photogrammetry Survey as a Function of the Number and Location of Ground Control Points Used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A. Assessing the Accuracy of Georeferenced Point Clouds Produced via Multi-View Stereopsis from Unmanned Aerial Vehicle (UAV) Imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.-J.; García-Ferrer, A.; Pérez-Porras, F.-J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Neitzel, F.; Klonowski, J. Mobile 3D mapping with a low-cost UAV system. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-1/C22, 39–44. [Google Scholar] [CrossRef]
- Anders, N.; Masselink, R.; Keesstra, S.; Suomalainen, J. High-res digital surface modeling using fixed-wing UAV-based photogrammetry. In Proceedings of the Geomorphometry 2013, Nanjing, China, 16–20 October 2013; pp. 16–20. [Google Scholar]
- Barba, S.; Barbarella, M.; Di Benedetto, A.; Fiani, M.; Limongiello, M. Quality assessment of UAV photogrammetric archaeological survey. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W9, 93–100. [Google Scholar] [CrossRef]
- Limongiello, M.; Santoriello, A.; Schirru, G.; Bonaudo, R.; Barba, S. The Amphitheatre of Avella: From its origin to digital. In Proceedings of the IMEKO International Conference on Metrology for Archaeology and Cultural Heritage, Torino, Italy, 19–21 October 2016. [Google Scholar]
- ENAC. LG 2016/003-NAV Aeromobili a Pilotaggio Remoto con Caratteristiche di Inoffensività. 2016. Available online: https://www.enac.gov.it/la-normativa/normativa-enac/linee-guida/lg-2016003-nav (accessed on 15 October 2019).
- Ahn, S.J.; Rauh, W. Circular Coded Target and Its Application to Optical 3D-Measurement Techniques. In Proceedings of the Mustererkennung 1998, Berlin, Heidelberg, 29 September–1 October 1998; pp. 245–252. [Google Scholar]
- Barbarella, M. Digital technology and geodetic infrastructures in Italian cartography. Città E Stor. 2014, 9, 91–110. [Google Scholar]
- Pádua, L.; Adão, T.; Hruška, J.; Marques, P.; Sousa, A.; Morais, R.; Lourenço, J.M.; Sousa, J.J.; Peres, E. UAS-based photogrammetry of cultural heritage sites: A case study addressing Chapel of Espírito Santo and photogrammetric software comparison. In Proceedings of the International Conference on Geoinformatics and Data Analysis, Prague, Czech Republic, 15–17 March 2019; pp. 72–76. [Google Scholar]
- Agisoft, L. Agisoft PhotoScan user manual. Prof. Ed. Version 2016, 1, 37. [Google Scholar]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Oliphant, T. NumPy. Available online: https://numpy.org/ (accessed on 1 February 2019).
- McKinney, W. Pandas. Available online: https://pandas.pydata.org/ (accessed on 1 February 2019).












© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barba, S.; Barbarella, M.; Di Benedetto, A.; Fiani, M.; Gujski, L.; Limongiello, M. Accuracy Assessment of 3D Photogrammetric Models from an Unmanned Aerial Vehicle. Drones 2019, 3, 79. https://doi.org/10.3390/drones3040079
Barba S, Barbarella M, Di Benedetto A, Fiani M, Gujski L, Limongiello M. Accuracy Assessment of 3D Photogrammetric Models from an Unmanned Aerial Vehicle. Drones. 2019; 3(4):79. https://doi.org/10.3390/drones3040079
Chicago/Turabian StyleBarba, Salvatore, Maurizio Barbarella, Alessandro Di Benedetto, Margherita Fiani, Lucas Gujski, and Marco Limongiello. 2019. "Accuracy Assessment of 3D Photogrammetric Models from an Unmanned Aerial Vehicle" Drones 3, no. 4: 79. https://doi.org/10.3390/drones3040079
APA StyleBarba, S., Barbarella, M., Di Benedetto, A., Fiani, M., Gujski, L., & Limongiello, M. (2019). Accuracy Assessment of 3D Photogrammetric Models from an Unmanned Aerial Vehicle. Drones, 3(4), 79. https://doi.org/10.3390/drones3040079