
Review of Biomimetic Approaches for Drones




Abstract
:1. Introduction
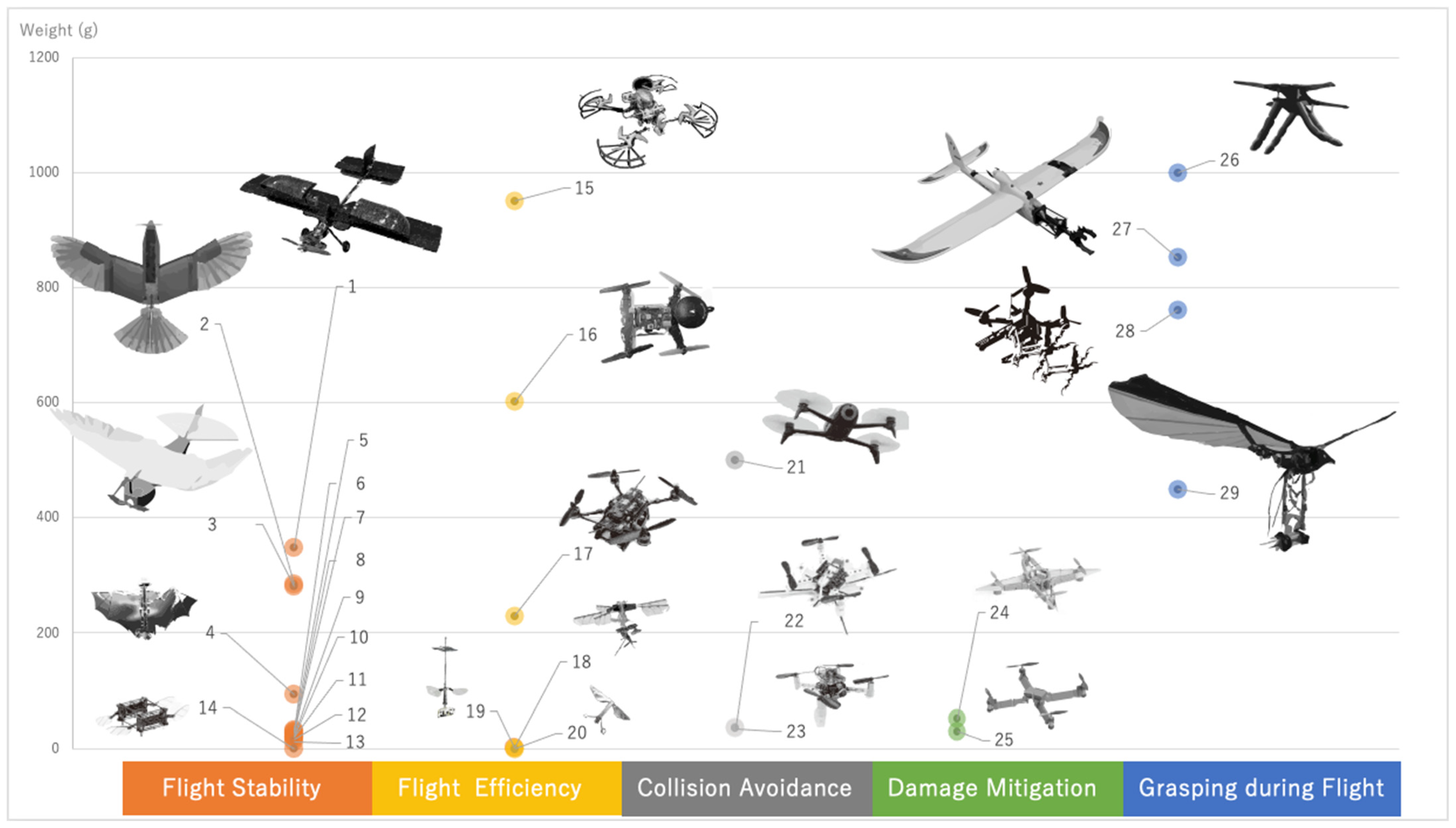
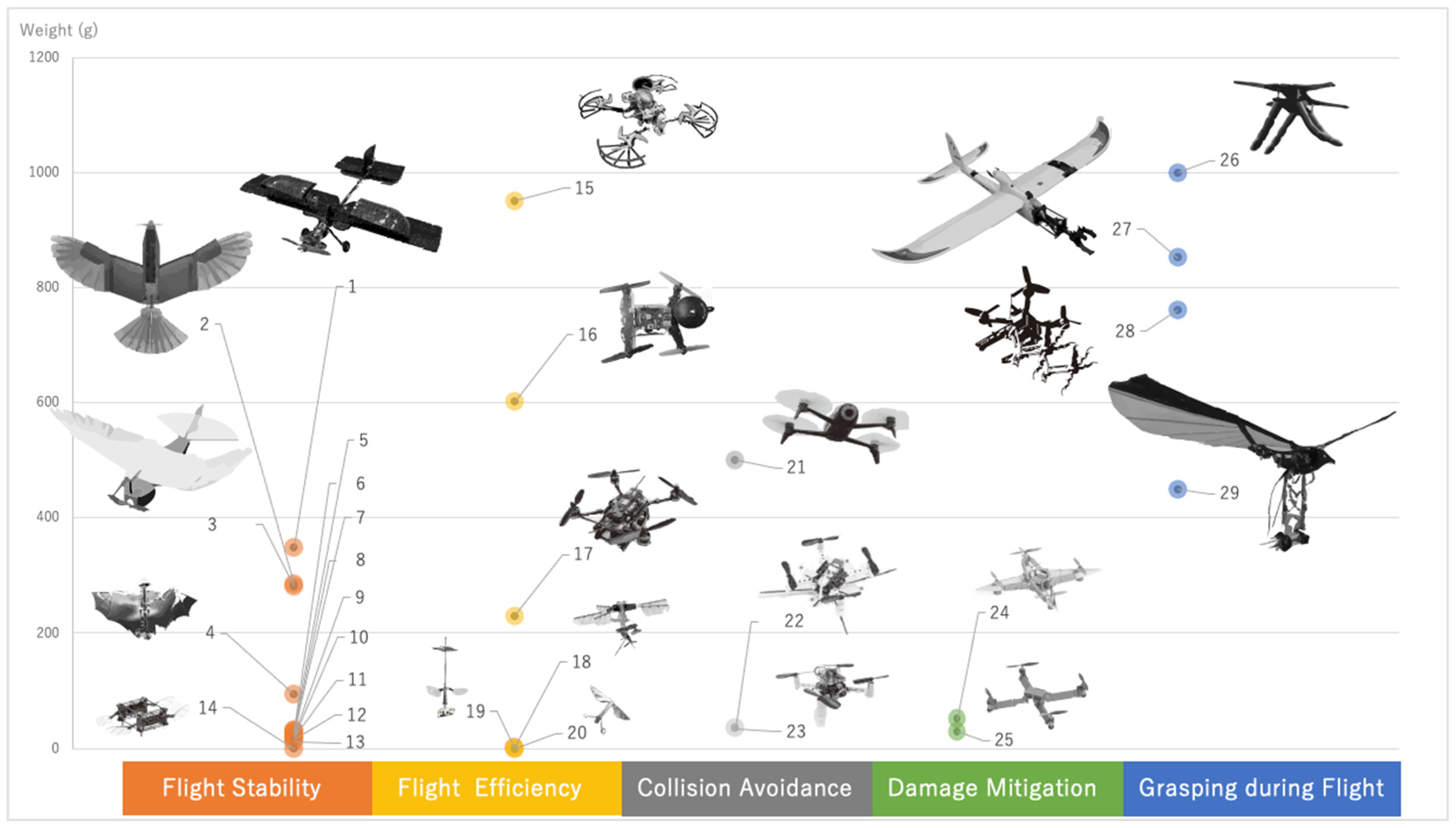
- Flight stability: flying in inclement weather, complex confined environments such as underground tunnels and buildings, urban areas, and non-GPS environments;
- Flight efficiency: working for long hours over a wide space;
- Collision avoidance: avoiding other flying objects, buildings, trees, and animals in the airspace;
- Damage mitigation: mitigating the significant damage to aircraft, people, animals, and property that occurs in the event of a collision;
- Grasping during flight: grasping and carrying irregularly shaped heavy objects.
2. Representative Biomimetic Designs in SUAVs
2.1. Flight Stability
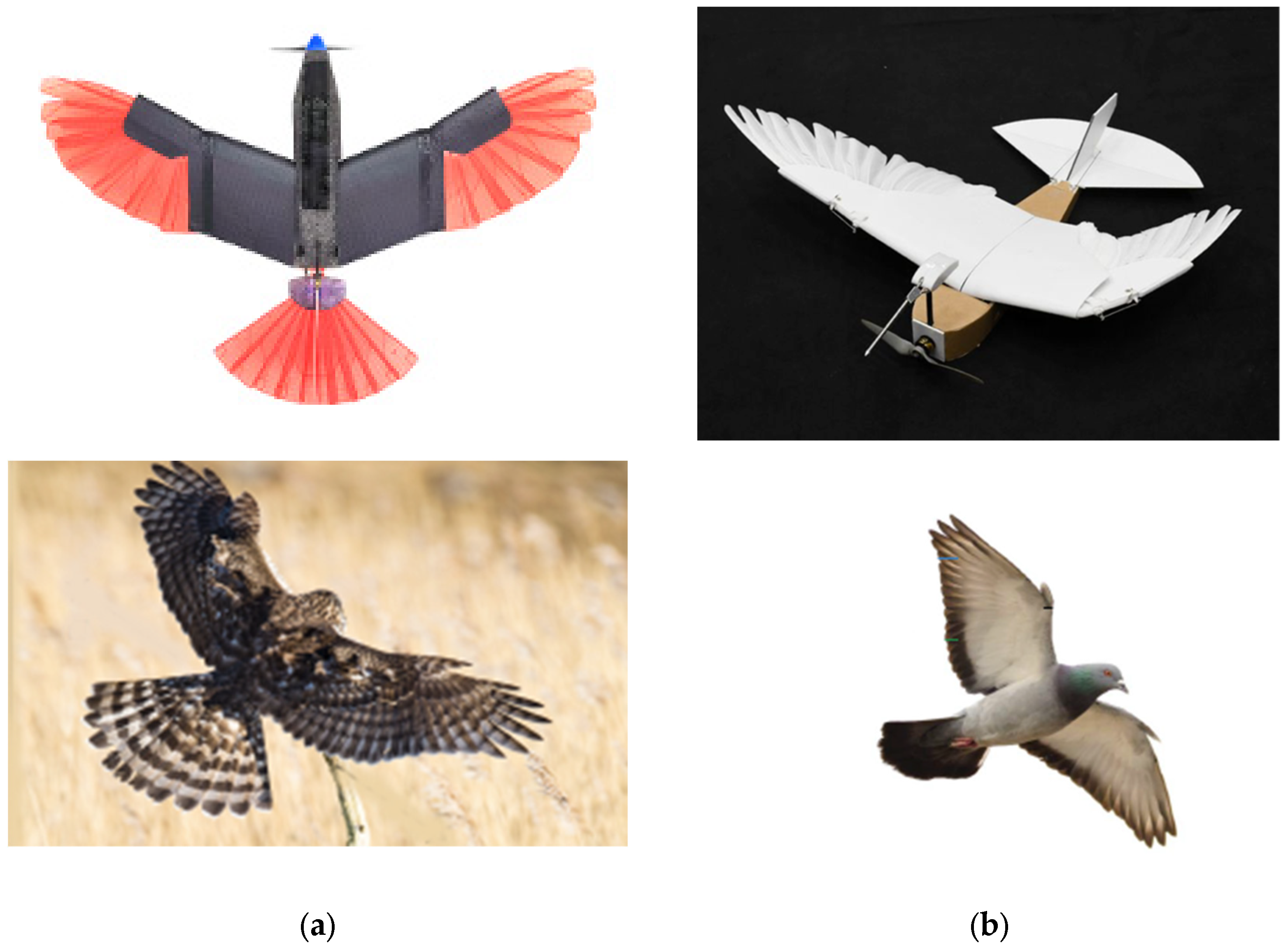
2.1.1. Morphing-Wing-Based Gliding
2.1.2. Wing-Flapping-Based Agility
2.1.3. Attitude Control in Flight
2.2. Flight Efficiency
2.3. Collision Avoidance
2.4. Damage Mitigation
2.5. Grasping during Flight
3. Future Tasks of Biomimetic Drones
3.1. Innovative Design
3.2. Flight Control Technologies
3.3. Biodiversity Conservation
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shyy, W.; Aono, H.; Kang, C.-k.; Liu, H. An Introduction to Flapping Wing Aerodynamics; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Umehara, M. Ise Hisai Han Shi: Fujikage (History of Ise Hisai Clan), Mie-Ken Kyodo Shiryo Sosho (Mie Prefecture Local Materials in Japanese); Mie-ken Kyodo Shiryo Kankokai (Mie Prefecture Local Materials Publication Society): Mie Prefecture, Japan, 1971; Volume 43. [Google Scholar]
- Harkness, J.M. A lifetime of connections: Otto Herbert Schmitt, 1913–1998. Phys. Perspect. 2002, 4, 456–490. [Google Scholar] [CrossRef]
- Speck, O.; Speck, D.; Horn, R.; Gantner, J.; Sedlbauer, K.P. Biomimetic bio-inspired biomorph sustainable? An attempt to classify and clarify biology-derived technical developments. Bioinspir. Biomim. 2017, 12, 011004. [Google Scholar] [CrossRef] [PubMed]
- Dictionary, M.-W.s.o. Definition of Biomimetics. Available online: https://www.merriam-webster.com/dictionary/biomimetics (accessed on 26 July 2022).
- ISO 18458:2015; Biomimetics—Terminology, Concepts and Methodology. ISO: Geneva, Switzerland, 2015. Available online: https://www.iso.org/standard/62500.html (accessed on 27 April 2022).
- Nonami, K.; Kendoul, F.; Suzuki, S.; Wang, W.; Nakazawa, D. Autonomous Flying Robots; Springer: Tokyo, Japan, 2010. [Google Scholar]
- Vincent, J.F.V.; Bogatyreva, O.A.; Bogatyrev, N.R.; Bowyer, A.; Pahl, A.K. Biomimetics: Its practice and theory. J. R. Soc. Interface 2006, 3, 471–482. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- IPBES. Global Assessment Report on Biodiversity and Ecosystem Services of the Intergovernmental Science-Policy Platform on Biodiversity and Ecosystem Services; IPBES Secretariat: Bonn, Germany, 2019; p. 1148. [Google Scholar]
- Díaz, S.; Settele, J.; Brondízio Eduardo, S.; Ngo Hien, T.; Agard, J.; Arneth, A.; Balvanera, P.; Brauman Kate, A.; Butchart Stuart, H.M.; Chan Kai, M.A.; et al. Pervasive human-driven decline of life on Earth points to the need for transformative change. Science 2019, 366, eaax3100. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- The Ministry of Economy, Trade and Industry, Japan. Where Will Flying Cars Take Us? Japan Develops World’s First Air Mobility Roadmap. 2019. Available online: https://www.meti.go.jp/english/mobile/2019/20190318001en.html (accessed on 19 October 2022).
- Harvey, C.; Gamble, L.L.; Bolander, C.R.; Hunsaker, D.F.; Joo, J.J.; Inman, D.J. A review of avian-inspired morphing for UAV flight control. Prog. Aerosp. Sci. 2022, 132, 100825. [Google Scholar] [CrossRef]
- Rose, J.B.R.; Natarajan, S.G.; Gopinathan, V.T. Biomimetic flow control techniques for aerospace applications: A comprehensive review. Rev. Environ. Sci. Bio/Technol. 2021, 20, 645–677. [Google Scholar] [CrossRef]
- Sun, J.; Liu, C.; Bhushan, B. A review of beetle hindwings: Structure, mechanical properties, mechanism and bioinspiration. J. Mech. Behav. Biomed. Mater. 2019, 94, 63–73. [Google Scholar] [CrossRef]
- Meng, J.; Buzzatto, J.; Liu, Y.; Liarokapis, M. On Aerial Robots with Grasping and Perching Capabilities: A Comprehensive Review. Front. Robot. AI 2022, 8, 739173. [Google Scholar] [CrossRef]
- Salami, E.; Ward, T.A.; Montazer, E.; Ghazali, N.N.N. A review of aerodynamic studies on dragonfly flight. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 6519–6537. [Google Scholar] [CrossRef]
- Liu, H.; Ravi, S.; Kolomenskiy, D.; Tanaka, H. Biomechanics and biomimetics in insect-inspired flight systems. Philos. Trans. R. Soc. B Biol. Sci. 2016, 371, 20150390. [Google Scholar] [CrossRef]
- Ajanic, E.; Feroskhan, M.; Mintchev, S.; Noca, F.; Floreano, D. Bioinspired wing and tail morphing extends drone flight capabilities. Sci. Robot. 2020, 5, eabc2897. [Google Scholar] [CrossRef]
- Matloff, L.Y.; Chang, E.; Feo, T.J.; Jeffries, L.; Stowers, A.K.; Thomson, C.; Lentink, D. How flight feathers stick together to form a continuous morphing wing. Science 2020, 367, 293. [Google Scholar] [CrossRef]
- Karasek, M.; Muijres, F.T.; De Wagter, C.; Remes, B.D.W.; de Croon, G. A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns. Science 2018, 361, 1089. [Google Scholar] [CrossRef] [Green Version]
- De Croon, G. Flapping wing drones show off their skills. Sci. Robot. 2020, 5, eabd0233. [Google Scholar] [CrossRef]
- Ramezani, A.; Chung, S.J.; Hutchinson, S. A biomimetic robotic platform to study flight specializations of bats. Sci. Robot. 2017, 2, eaal2505. [Google Scholar] [CrossRef] [Green Version]
- Chin, Y.W.; Kok, J.M.; Zhu, Y.Q.; Chan, W.L.; Chahl, J.S.; Khoo, B.C.; Lau, G.K. Efficient flapping wing drone arrests high-speed flight using post-stall soaring. Sci. Robot. 2020, 5, eaba2386. [Google Scholar] [CrossRef]
- Keennon, M.; Klingebiel, K.; Won, H.; Andriukov, A. Development of the Nano Hummingbird: A Tailless Flapping Wing Micro Air Vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012. [Google Scholar]
- Aerovironment. Aerovironment Develops World’s First Fully Operational Life-Size Hummingbird-Like Unmanned Aircraft for DAPA. 2011, press release. Available online: https://www.businesswire.com/news/home/20110217005480/en/AeroVironment-Develops-World%E2%80%99s-First-Fully-Operational-Life-Size-Hummingbird-Like-Unmanned-Aircraft-for-DARPA (accessed on 10 June 2022).
- Roshanbin, A.; Altartouri, H.; Karásek, M.; Preumont, A. COLIBRI: A hovering flapping twin-wing robot. Int. J. Micro Air Veh. 2017, 9, 270–282. [Google Scholar] [CrossRef] [Green Version]
- Fei, F.; Tu, Z.; Zhang, J.; Deng, X. Learning Extreme Hummingbird Maneuvers on Flapping Wing Robots. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 109–115. [Google Scholar]
- Nagai, H.; Nakamura, K.; Fujita, K.; Tanaka, I.; Nagasaki, S.; Kinjo, Y.; Kuwazono, S.; Murozono, M. Development of Tailless Two-winged Flapping Drone with Gravity Center Position Control. Sens. Mater. 2021, 33, 859–872. [Google Scholar] [CrossRef]
- Phan, H.V.; Aurecianus, S.; Kang, T.; Park, H.C. KUBeetle-S: An insect-like, tailless, hover-capable robot that can fly with a low-torque control mechanism. Int. J. Micro Air Veh. 2019, 11, 1756829319861371. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, Q.-V.; Chan, W.L. Development and flight performance of a biologically-inspired tailless flapping-wing micro air vehicle with wing stroke plane modulation. Bioinspir. Biomim. 2018, 14, 016015. [Google Scholar] [CrossRef]
- Shyy, W.; Kang, C.-k.; Chirarattananon, P.; Ravi, S.; Liu, H. Aerodynamics, sensing and control of insect-scale flapping-wing flight. Proc. R. Soc. A Math. Phys. Eng. Sci. 2016, 472, 20150712. [Google Scholar] [CrossRef] [Green Version]
- Nakamura, K.; Katsuyama, R.; Kuwajima, S.; Li, Z.; Nomizu, A.; Okamoto, R.; Munakata, T.; Watanabe, T.W. The WiFly: Flapping-Wing Small Unmanned Aerial Vehicle with Center-of-Gravity Shift Mechanism. J. Robot. Mechatron. 2021, 33, 205–215. [Google Scholar] [CrossRef]
- Chen, Y.F.; Zhao, H.C.; Mao, J.; Chirarattananon, P.; Helbling, E.F.; Hyun, N.S.P.; Clarke, D.R.; Wood, R.J. Controlled flight of a microrobot powered by soft artificial muscles. Nature 2019, 575, 324. [Google Scholar] [CrossRef] [PubMed]
- Vourtsis, C.; Rochel, V.C.; Serrano, F.R.; Stewart, W.; Floreano, D. Insect Inspired Self-Righting for Fixed-Wing Drones. IEEE Robot. Autom. Lett. 2021, 6, 6805–6812. [Google Scholar] [CrossRef]
- Billingsley, E.; Ghommem, M.; Vasconcellos, R.; Abdelkefi, A. On the Aerodynamic Analysis and Conceptual Design of Bioinspired Multi-Flapping-Wing Drones. Drones 2021, 5, 64. [Google Scholar] [CrossRef]
- Li, Y.; Yonezawa, K.; Xu, R.; Liu, H. A Biomimetic Rotor-configuration Design for Optimal Aerodynamic Performance in Quadrotor Drone. J. Bionic Eng. 2021, 18, 824–839. [Google Scholar] [CrossRef]
- Festo. BionicSwift. Available online: https://www.festo.com/us/en/e/about-festo/research-and-development/bionic-learning-network/highlights-from-2015-to-2017/bionicswift-id_326830/ (accessed on 11 October 2022).
- Hildmann, H.; Kovacs, E.; Saffre, F.; Isakovic, A.F. Nature-Inspired Drone Swarming for Real-Time Aerial Data-Collection Under Dynamic Operational Constraints. Drones 2019, 3, 71. [Google Scholar] [CrossRef] [Green Version]
- Ozaki, T.; Ohta, N.; Jimbo, T.; Hamaguchi, K. A wireless radiofrequency-powered insect-scale flapping-wing aerial vehicle. Nat. Electron. 2021, 4, 845. [Google Scholar] [CrossRef]
- Jafferis, N.T.; Helbling, E.F.; Karpelson, M.; Wood, R.J. Untethered flight of an insect-sized flapping-wing microscale aerial vehicle. Nature 2019, 570, 491. [Google Scholar] [CrossRef]
- Mohta, K.; Kumar, V.; Daniilidis, K. Vision-based control of a quadrotor for perching on lines. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3130–3136. [Google Scholar]
- Chirarattananon, P.; Ma, K.Y.; Wood, R.J. Perching with a robotic insect using adaptive tracking control and iterative learning control. Int. J. Robot. Res. 2016, 35, 1185–1206. [Google Scholar] [CrossRef]
- Li, L.; Wang, S.; Zhang, Y.; Song, S.; Wang, C.; Tan, S.; Zhao, W.; Wang, G.; Sun, W.; Yang, F.; et al. Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces. Sci. Robot. 2022, 7, eabm6695. [Google Scholar] [CrossRef]
- De Croon, G.; De Wagter, C.; Seidl, T. Enhancing optical-flow-based control by learning visual appearance cues for flying robots. Nat. Mach. Intell. 2021, 3, 33. [Google Scholar] [CrossRef]
- Nakata, T.; Phillips, N.; Simões, P.; Russell, I.J.; Cheney, J.A.; Walker, S.M.; Bomphrey, R.J. Aerodynamic imaging by mosquitoes inspires a surface detector for autonomous flying vehicles. Science 2020, 368, 634–637. [Google Scholar] [CrossRef]
- Bird, B. MetaFly. Available online: https://www.bionicbird.com/world/shop/metafly (accessed on 11 October 2022).
- Falanga, D.; Kleber, K.; Scaramuzza, D. Dynamic obstacle avoidance for quadrotors with event cameras. Sci. Robot. 2020, 5, eaaz9712. [Google Scholar] [CrossRef]
- McGuire, K.N.; De Wagter, C.; Tuyls, K.; Kappen, H.J.; de Croon, G.C.H.E. Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment. Sci. Robot. 2019, 4, eaaw9710. [Google Scholar] [CrossRef]
- Zhao, J.; Hu, C.; Zhang, C.; Wang, Z.; Yue, S. A Bio-inspired Collision Detector for Small Quadcopter. In Proceedings of the 2018 International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–7. [Google Scholar]
- Mintchev, S.; de Rivaz, S.; Floreano, D. Insect-Inspired Mechanical Resilience for Multicopters. IEEE Robot. Autom. Lett. 2017, 2, 1248–1255. [Google Scholar] [CrossRef] [Green Version]
- Mintchev, S.; Shintake, J.; Floreano, D. Bioinspired dual-stiffness origami. Sci. Robot. 2018, 3, eaau0275. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, D.Q.; Loianno, G.; Ho, V. Towards Design of a Deformable Propeller for Drone Safety. In Proceedings of the 2020 3rd Ieee International Conference on Soft Robotics (Robosoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 483–488. [Google Scholar]
- Chahl, J.; Chitsaz, N.; McIvor, B.; Ogunwa, T.; Kok, J.-M.; McIntyre, T.; Abdullah, E. Biomimetic Drones Inspired by Dragonflies Will Require a Systems Based Approach and Insights from Biology. Drones 2021, 5, 24. [Google Scholar] [CrossRef]
- Fishman, J.; Ubellacker, S.; Hughes, N.; Carlone, L. Dynamic Grasping with a “Soft” Drone: From Theory to Practice. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4214–4221. [Google Scholar]
- Roderick, W.R.T.; Cutkosky, M.R.; Lentink, D. Bird-inspired dynamic grasping and perching in arboreal environments. Sci. Robot. 2021, 6, eabj7562. [Google Scholar] [CrossRef]
- Stewart, W.; Guarino, L.; Piskarev, Y.; Floreano, D. Passive Perching with Energy Storage for Winged Aerial Robots. Adv. Intell. Syst. 2021, 2100150. [Google Scholar] [CrossRef]
- Gomez-Tamm, A.E.; Perez-Sanchez, V.; Arrue, B.C.; Ollero, A.; IEEE. SMA Actuated Low-Weight Bio-Inspired Claws for Grasping and Perching Using Flapping Wing Aerial Systems. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 8807–8814. [Google Scholar]
- De Croon, G.C.H.E.; Dupeyroux, J.J.G.; Fuller, S.B.; Marshall, J.A.R. Insect-inspired AI for autonomous robots. Sci. Robot. 2022, 7, eabl6334. [Google Scholar] [CrossRef]
- Saito, K.; Nagai, H.; Suto, K.; Ogawa, N.; Seong, Y.a.; Tachi, T.; Niiyama, R.; Kawahara, Y. Insect wing 3D printing. Sci. Rep. 2021, 11, 18631. [Google Scholar] [CrossRef] [PubMed]
- Terutsuki, D.; Uchida, T.; Fukui, C.; Sukekawa, Y.; Okamoto, Y.; Kanzaki, R. Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sens. Actuators B Chem. 2021, 339, 129770. [Google Scholar] [CrossRef]
- Yim, J.K.; Singh, B.R.P.; Wang, E.K.; Featherstone, R.; Fearing, R.S. Precision Robotic Leaping and Landing Using Stance-Phase Balance. IEEE Robot. Autom. Lett. 2020, 5, 3422–3429. [Google Scholar] [CrossRef]
- Kim, K.; Spieler, P.; Lupu, E.S.; Ramezani, A.; Chung, S.J. A bipedal walking robot that can fly, slackline, and skateboard. Sci. Robot. 2021, 6, abf8136. [Google Scholar] [CrossRef]
- Chang, E.; Matloff Laura, Y.; Stowers Amanda, K.; Lentink, D. Soft biohybrid morphing wings with feathers underactuated by wrist and finger motion. Sci. Robot. 2020, 5, eaay1246. [Google Scholar] [CrossRef]
- Hoff, J.; Syed, U.; Ramezani, A.; Hutchinson, S. Trajectory planning for a bat-like flapping wing robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 6800–6805. [Google Scholar]
- Coleman, D.A.; Benedict, M.; Amp, T.A.; Hrishikeshavan, V.; Chopra, I. Design, Development and Flight-Testing of a Robotic Hummingbird. In Proceedings of the American Helicopter Society (AHS) 71st Annual Forum, Virginia Beach, VA, USA, 5–7 May 2015. [Google Scholar]
- Phan, H.V.; Aurecianus, S.; Kang, T.; Park, H.C. Attitude Control Mechanism in an Insect-like Tailless Two-winged Flying Robot by Simultaneous Modulation of Stroke Plane and Wing Twist. In Proceeding of the 10th international micro air vehicle competition and conference, Melbourne, Australia, 17-23 November 2018; pp. 192–197. [Google Scholar]
- De Wagter, C.; Karásek, M.; de Croon, G. Quad-thopter: Tailless flapping wing robot with four pairs of wings. Int. J. Micro Air Veh. 2018, 10, 244–253. [Google Scholar] [CrossRef] [Green Version]
- Rose, C.; Fearing, R.S. Comparison of ornithopter wind tunnel force measurements with free flight. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1816–1821. [Google Scholar]
- Di Luca, M.; Mintchev, S.; Heitz, G.; Noca, F.; Floreano, D. Bioinspired morphing wings for extended flight envelope and roll control of small drones. Interface Focus 2017, 7, 20160092. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Tu, Z.; Fei, F.; Deng, X. Geometric flight control of a hovering robotic hummingbird. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5415–5421. [Google Scholar]
- Clawson, T.S.; Ferrari, S.; Fuller, S.B.; Wood, R.J. Spiking neural network (SNN) control of a flapping insect-scale robot. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 3381–3388. [Google Scholar]
- Sung, Y.-H.; Kim, H.-Y.; Han, J.-H.; Lee, D.-K. Self-Learning MAV Under Safety-Guaranteed Flight Test Environment. AIAA J. 2022, 60, 4440–4452. [Google Scholar] [CrossRef]
- Ministry of Land, Infrastructure, Transport and Tourism, Japan. Drone wo Katsuyoushita Nimotsu Haisou tou nikansuru Guideline, Ver.2.0 (Guideline Ver. 2.0 for the Delivery of Packages and Other Goods Using Drones, in Japanese). 2021. Available online: https://www.mlit.go.jp/common/001410995.pdf (accessed on 22 May 2022).
- Ministry of the Environment. National Biodiversity Strategy 2012–2020: Tayouisei Kokkasenryaku 2012–2020 Yutakana Shizenkyosei-shakai no Jitugen ni muketa Roadmap (National Biodiversity Strategy 2012–2020: A Roadmap for Realizing a Society in Harmony with Nature, in Japanese). 2012. Available online: https://www.biodic.go.jp/biodiversity/about/initiatives/files/2012-2020/01_honbun.pdf (accessed on 21 July 2022).
- Barthlott, W.; Rafiqpoor, M.D.; Erdelen, W.R. Bionics and Biodiversity—Bio-inspired Technical Innovation for a Sustainable Future. In Biomimetic Research for Architecture and Building Construction; Knippers, J., Nickel, K.G., Speck, T., Eds.; Biologically-Inspired Systems book series; Springer: Berlin/Heidelberg, Germany, 2016; pp. 11–55. [Google Scholar]
- Iyer, V.; Gaensbauer, H.; Daniel, T.L.; Gollakota, S. Wind dispersal of battery-free wireless devices. Nature 2022, 603, 427–433. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
| Approach | Model Animal | Targeted Function | Mechanical Components |
|---|---|---|---|
| Morphing-wing-based gliding |
| Responsive body | A front propeller, adjustable tail, wings |
| Seamless feathers | Wing ex-intensions linked to wrists | |
| Wing-flapping-based agility |
| High acceleration | Flapping wings |
| Acrobat flight | High DoF * of wings | |
| Multimodal flight | Anti-whirl transmission, flexible wing membrane | |
| Hovering | Wing twist modulation | |
| Attitude control in flight |
| Seamless hovering and horizontal flight | Mechanism of shifting the center of gravity |
| High-speed flapping | Soft actuators | |
| Recovering from flipping over | Elytra-like wings |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanaka, S.; Asignacion, A.; Nakata, T.; Suzuki, S.; Liu, H. Review of Biomimetic Approaches for Drones. Drones 2022, 6, 320. https://doi.org/10.3390/drones6110320
Tanaka S, Asignacion A, Nakata T, Suzuki S, Liu H. Review of Biomimetic Approaches for Drones. Drones. 2022; 6(11):320. https://doi.org/10.3390/drones6110320
Chicago/Turabian StyleTanaka, Saori, Abner Asignacion, Toshiyuki Nakata, Satoshi Suzuki, and Hao Liu. 2022. "Review of Biomimetic Approaches for Drones" Drones 6, no. 11: 320. https://doi.org/10.3390/drones6110320
APA StyleTanaka, S., Asignacion, A., Nakata, T., Suzuki, S., & Liu, H. (2022). Review of Biomimetic Approaches for Drones. Drones, 6(11), 320. https://doi.org/10.3390/drones6110320