

Synergistic Use of Sentinel-2 and UAV Multispectral Data to Improve and Optimize Viticulture Management



Abstract
1. Introduction
2. Materials and Methods
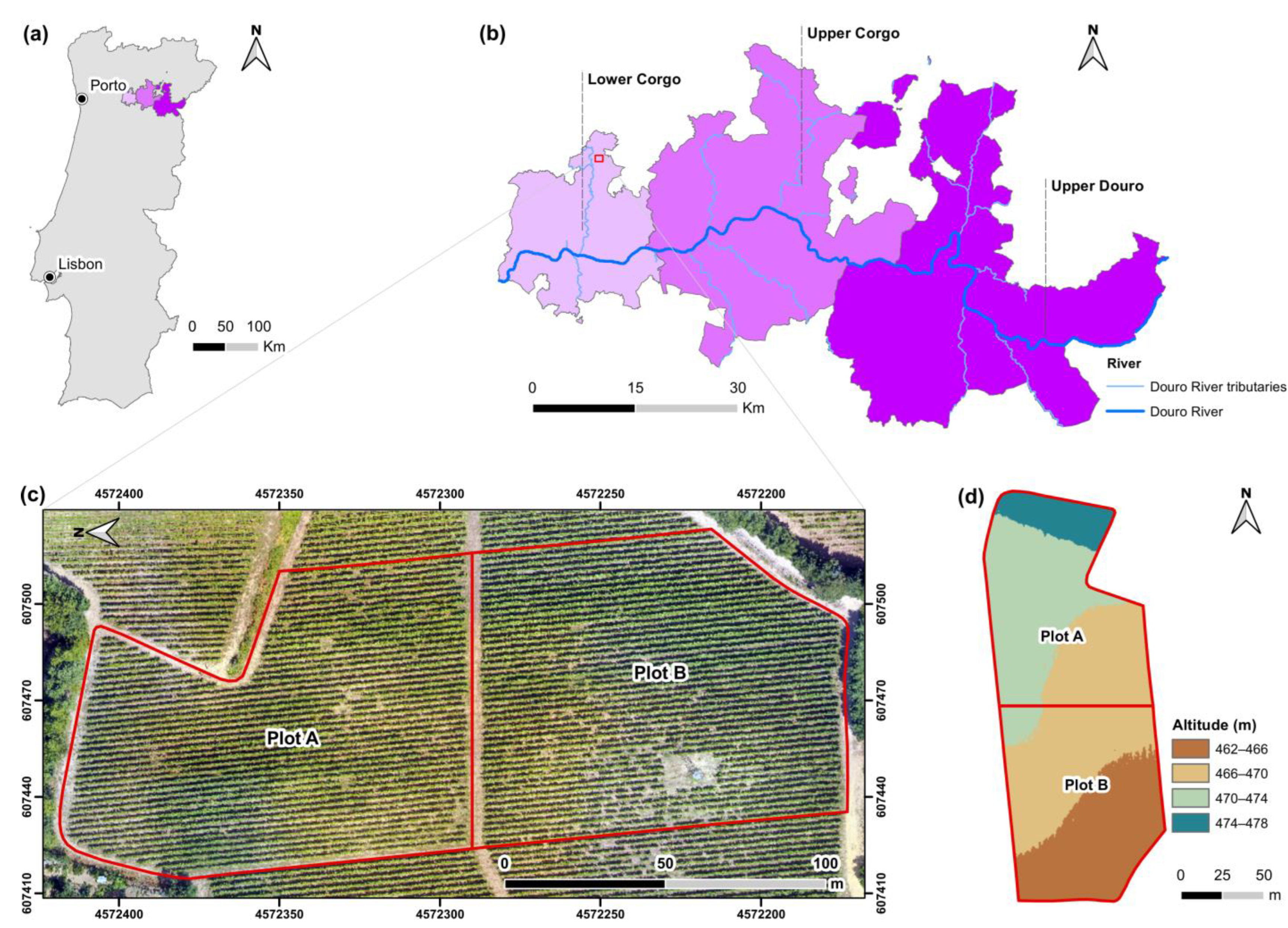
2.1. Study Area
2.2. Remote-Sensed Data
2.2.1. Sentinel-2
2.2.2. Unmanned Aerial Vehicle
2.3. Phenological Modeling
2.4. Data Processing
2.5. Data Analysis
3. Results
3.1. Data Characterization
3.2. Data Correlation
4. Discussion
4.1. Multi-Temporal Analysis of the Different Approaches
4.2. Benefits of Synergistic or Individual Use of Sentinel-2 and UAV Multispectral Data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khosla, R. Precision Agriculture: Challenges and Opportunities in a Flat World. In Proceedings of the 2010 19th World Congress of Soil Science, Soil Solutions for a Changing World, Brisbane, Australia, 1–6 August 2010; pp. 26–28. [Google Scholar]
- Pierce, F.J.; Robert, P.C.; Mangold, G. Site Specific Management: The Pros, the Cons, and the Realities. In Proceedings of the Integrated Crop Management Conference, Ames, IA, USA, 30 November–1 December 1994; p. 11934214. [Google Scholar]
- Santesteban, L.G. Precision Viticulture and Advanced Analytics. A Short Review. Food Chem. 2019, 279, 58–62. [Google Scholar] [CrossRef] [PubMed]
- Matese, A.; Di Gennaro, S.F. Technology in Precision Viticulture: A State of the Art Review. Int. J. Wine Res. 2015, 69. [Google Scholar] [CrossRef]
- Manson, S.M.; Bonsal, D.B.; Kernik, M.; Lambin, E.F. Geographic Information Systems and Remote Sensing. In International Encyclopedia of the Social & Behavioral Sciences, 2nd ed.; Wright, J.D., Ed.; Elsevier: Oxford, UK, 2015; pp. 64–68. ISBN 978-0-08-097087-5. [Google Scholar]
- Viscarra Rossel, R.A.; Adamchuk, V.I.; Sudduth, K.A.; McKenzie, N.J.; Lobsey, C. Proximal Soil Sensing: An Effective Approach for Soil Measurements in Space and Time. Adv. Agron. 2011, 113, 243–291. [Google Scholar]
- Brook, A.; De Micco, V.; Battipaglia, G.; Erbaggio, A.; Ludeno, G.; Catapano, I.; Bonfante, A. A Smart Multiple Spatial and Temporal Resolution System to Support Precision Agriculture from Satellite Images: Proof of Concept on Aglianico Vineyard. Remote Sens. Environ. 2020, 240, 111679. [Google Scholar] [CrossRef]
- Hall, A.; Lamb, D.W.; Holzapfel, B.; Louis, J. Optical Remote Sensing Applications in Viticulture—A Review. Aust. J. Grape Wine Res. 2002, 8, 36–47. [Google Scholar] [CrossRef]
- Gatti, M.; Dosso, P.; Maurino, M.; Merli, M.C.; Bernizzoni, F.; José Pirez, F.; Platè, B.; Bertuzzi, G.C.; Poni, S. MECS-VINE®: A New Proximal Sensor for Segmented Mapping of Vigor and Yield Parameters on Vineyard Rows. Sensors 2016, 16, 2009. [Google Scholar] [CrossRef]
- Remote Sensing Handbook for Tropical Coastal Management. Green, E.P., Edwards, A.J., Eds.; Coastal Management Sourcebooks; Unesco Pub: Paris, France, 2000; ISBN 978-92-3-103736-8. [Google Scholar]
- Alvarez-Vanhard, E.; Corpetti, T.; Houet, T. UAV & Satellite Synergies for Optical Remote Sensing Applications: A Literature Review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar] [CrossRef]
- Mulla, D.J. Twenty Five Years of Remote Sensing in Precision Agriculture: Key Advances and Remaining Knowledge Gaps|Elsevier Enhanced Reader. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Sishodia, R.P.; Ray, R.L.; Singh, S.K. Applications of Remote Sensing in Precision Agriculture: A Review. Remote Sens. 2020, 12, 3136. [Google Scholar] [CrossRef]
- Yang, G.; Liu, J.; Zhao, C.; Li, Z.; Huang, Y.; Yu, H.; Xu, B.; Yang, X.; Zhu, D.; Zhang, X.; et al. Unmanned Aerial Vehicle Remote Sensing for Field-Based Crop Phenotyping: Current Status and Perspectives. Front. Plant Sci. 2017, 8, 1111. [Google Scholar] [CrossRef]
- Katsigiannis, P.; Galanis, G.; Dimitrakos, A.; Tsakiridis, N.; Kalopesas, C.; Alexandridis, T.; Chouzouri, A.; Patakas, A.; Zalidis, G. Fusion of Spatio-Temporal UAV and Proximal Sensing Data for an Agricultural Decision Support System. In Proceedings of the Fourth International Conference on Remote Sensing and Geoinformation of the Environment, Paphos, Cyprus, 12 August 2016; Themistocleous, K., Hadjimitsis, D.G., Michaelides, S., Papadavid, G., Eds.; Volume 9688. [Google Scholar]
- Gasmi, A.; Masse, A.; Ducrot, D.; Zouari, H. Télédétection et photogrammétrie pour l’étude de la dynamique de l’occupation du sol dans le bassin versant de l’oued Chiba (Cap-Bon, Tunisie). Rev. Fr. Photogrammétrie Télédétection 2017, 43–51. [Google Scholar] [CrossRef]
- Romero, M.; Luo, Y.; Su, B.; Fuentes, S. Vineyard Water Status Estimation Using Multispectral Imagery from an UAV Platform and Machine Learning Algorithms for Irrigation Scheduling Management. Comput. Electron. Agric. 2018, 147, 109–117. [Google Scholar] [CrossRef]
- Hatfield, J.L.; Prueger, J.H.; Sauer, T.J.; Dold, C.; O’Brien, P.; Wacha, K. Applications of Vegetative Indices from Remote Sensing to Agriculture: Past and Future. Inventions 2019, 4, 71. [Google Scholar] [CrossRef]
- Giovos, R.; Tassopoulos, D.; Kalivas, D.; Lougkos, N.; Priovolou, A. Remote Sensing Vegetation Indices in Viticulture: A Critical Review. Agriculture 2021, 11, 457. [Google Scholar] [CrossRef]
- Rouse, W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems In The Great Plains With ERTS. NASA Spec. Publ. 1974, 351, 309–317. [Google Scholar]
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. J. Sens. 2017, 2017, e1353691. [Google Scholar] [CrossRef]
- Priori, S.; Martini, E.; Andrenelli, M.C.; Magini, S.; Agnelli, A.E.; Bucelli, P.; Biagi, M.; Pellegrini, S.; Costantini, E.A.C. Improving Wine Quality through Harvest Zoning and Combined Use of Remote and Soil Proximal Sensing. Soil Sci. Soc. Am. J. 2013, 77, 1338–1348. [Google Scholar] [CrossRef]
- Campos, J.; García-Ruíz, F.; Gil, E. Assessment of Vineyard Canopy Characteristics from Vigour Maps Obtained Using UAV and Satellite Imagery. Sensors 2021, 21, 2363. [Google Scholar] [CrossRef]
- Ferrer, M.; Echeverría, G.; Pereyra, G.; Gonzalez-Neves, G.; Pan, D.; Mirás-Avalos, J.M. Mapping Vineyard Vigor Using Airborne Remote Sensing: Relations with Yield, Berry Composition and Sanitary Status under Humid Climate Conditions. Precis. Agric. 2020, 21, 178–197. [Google Scholar] [CrossRef]
- Cogato, A.; Meggio, F.; Collins, C.; Marinello, F. Medium-Resolution Multispectral Data from Sentinel-2 to Assess the Damage and the Recovery Time of Late Frost on Vineyards. Remote Sens. 2020, 12, 1896. [Google Scholar] [CrossRef]
- Cogato, A.; Pagay, V.; Marinello, F.; Meggio, F.; Grace, P.; De Antoni Migliorati, M. Assessing the Feasibility of Using Sentinel-2 Imagery to Quantify the Impact of Heatwaves on Irrigated Vineyards. Remote Sens. 2019, 11, 2869. [Google Scholar] [CrossRef]
- Comparetti, A.; Marques da Silva, J.R. Use of Sentinel-2 Satellite for Spatially Variable Rate Fertiliser Management in a Sicilian Vineyard. Sustainability 2022, 14, 1688. [Google Scholar] [CrossRef]
- Esteves, C.; Fangueiro, D.; Braga, R.P.; Martins, M.; Botelho, M.; Ribeiro, H. Assessing the Contribution of ECa and NDVI in the Delineation of Management Zones in a Vineyard. Agronomy 2022, 12, 1331. [Google Scholar] [CrossRef]
- Bollas, N.; Kokinou, E.; Polychronos, V. Comparison of Sentinel-2 and UAV Multispectral Data for Use in Precision Agriculture: An Application from Northern Greece. Drones 2021, 5, 35. [Google Scholar] [CrossRef]
- Devaux, N.; Crestey, T.; Leroux, C.; Tisseyre, B. Potential of Sentinel-2 Satellite Images to Monitor Vine Fields Grown at a Territorial Scale. OENO One 2019, 53. [Google Scholar] [CrossRef]
- Khaliq, A.; Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Chiaberge, M.; Gay, P. Comparison of Satellite and UAV-Based Multispectral Imagery for Vineyard Variability Assessment. Remote Sens. 2019, 11, 436. [Google Scholar] [CrossRef]
- Hubbard, S.S.; Schmutz, M.; Balde, A.; Falco, N.; Peruzzo, L.; Dafflon, B.; Léger, E.; Wu, Y. Estimation of Soil Classes and Their Relationship to Grapevine Vigor in a Bordeaux Vineyard: Advancing the Practical Joint Use of Electromagnetic Induction (EMI) and NDVI Datasets for Precision Viticulture. Precis. Agric. 2021, 22, 1353–1376. [Google Scholar] [CrossRef]
- Di Gennaro, S.F.; Dainelli, R.; Palliotti, A.; Toscano, P.; Matese, A. Sentinel-2 Validation for Spatial Variability Assessment in Overhead Trellis System Viticulture Versus UAV and Agronomic Data. Remote Sens. 2019, 11, 2573. [Google Scholar] [CrossRef]
- Müllerová, J.; Brůna, J.; Bartaloš, T.; Dvořák, P.; Vítková, M.; Pyšek, P. Timing Is Important: Unmanned Aircraft vs. Satellite Imagery in Plant Invasion Monitoring. Front. Plant Sci. 2017, 8, 887. [Google Scholar] [CrossRef]
- Messina, G.; Peña, J.M.; Vizzari, M.; Modica, G. A Comparison of UAV and Satellites Multispectral Imagery in Monitoring Onion Crop. An Application in the ‘Cipolla Rossa Di Tropea’ (Italy). Remote Sens. 2020, 12, 3424. [Google Scholar] [CrossRef]
- Jain, K.; Pandey, A. Calibration of Satellite Imagery with Multispectral UAV Imagery. J. Indian Soc. Remote Sens. 2021, 49, 479–490. [Google Scholar] [CrossRef]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef]
- Lorenz, D.H.; Eichhorn, K.W.; Bleiholder, H.; Klose, R.; Meier, U.; Weber, E. Growth Stages of the Grapevine: Phenological Growth Stages of the Grapevine (Vitis Vinifera L. Ssp. Vinifera)—Codes and Descriptions According to the Extended BBCH Scale. Aust. J. Grape Wine Res. 1995, 1, 100–103. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Müller-Wilm, U.; Gascon, F. Sen2Cor for Sentinel-2. In Proceedings of the Image and Signal Processing for Remote Sensing XXIII, Warsaw, Poland, 11–14 September 2017; Volume 10427, pp. 37–48. [Google Scholar]
- McMaster, G.S.; Wilhelm, W.W. Growing Degree-Days: One Equation, Two Interpretations. Agric. For. Meteorol. 1997, 87, 291–300. [Google Scholar] [CrossRef]
- Winkler, A.J. General Viticulture; University of California Press: Berkeley, CA, USA, 1974. [Google Scholar]
- Amerine, M.A.; Winkler, A.J. Composition and Quality of Musts and Wines of California Grapes. Hilgardia 1944, 15, 493–675. [Google Scholar] [CrossRef]
- Meier, U. Growth Stages of Mono- and Dicotyledonous Plants: BBCH Monograph; Open Agrar Repositorium: Quedlinburg, Germany, 2018. [Google Scholar] [CrossRef]
- Ortega-Farias, S.; Riveros-Burgos, C. Modeling Phenology of Four Grapevine Cultivars (Vitis vinifera L.) in Mediterranean Climate Conditions. Sci. Hortic. 2019, 250, 38–44. [Google Scholar] [CrossRef]
- Lopes, J.; Eiras-Dias, J.; Abreu, F.; Clímaco, P.; Cunha, J.P.; Silvestre, J. Exigências Térmicas, Duração e Precocidade de Estados Fenológicos de Castas Da Colecção Ampelográfica Nacional. Ciênc. E Téc. Vitivinícola 2007, 23, 61–71. [Google Scholar]
- Di Gennaro, S.F.; Matese, A. Evaluation of Novel Precision Viticulture Tool for Canopy Biomass Estimation and Missing Plant Detection Based on 2.5D and 3D Approaches Using RGB Images Acquired by UAV Platform. Plant Methods 2020, 16, 91. [Google Scholar] [CrossRef]
- Duarte, L.; Teodoro, A.C.; Sousa, J.J.; Pádua, L. QVigourMap: A GIS Open Source Application for the Creation of Canopy Vigour Maps. Agronomy 2021, 11, 952. [Google Scholar] [CrossRef]
- Tukey, J.W. Comparing Individual Means in the Analysis of Variance. Biometrics 1949, 5, 99–114. [Google Scholar] [CrossRef] [PubMed]
- de Beurs, K.M.; Henebry, G.M. Land Surface Phenology, Climatic Variation, and Institutional Change: Analyzing Agricultural Land Cover Change in Kazakhstan. Remote Sens. Environ. 2004, 89, 497–509. [Google Scholar] [CrossRef]
- Borgogno-Mondino, E.; de Palma, L.; Novello, V. Investigating Sentinel 2 Multispectral Imagery Efficiency in Describing Spectral Response of Vineyards Covered with Plastic Sheets. Agronomy 2020, 10, 1909. [Google Scholar] [CrossRef]
- Tezza, L.; Vendrame, N.; Pitacco, A. Disentangling the Carbon Budget of a Vineyard: The Role of Soil Management. Agric. Ecosyst. Environ. 2019, 272, 52–62. [Google Scholar] [CrossRef]
- Magalhães, N. Tratado De Viticultura: A Videira, A Vinha E O “Terroir”, 2nd ed.; Esfera Poética: Lisboa, Portugal, 2015; ISBN 978-989-98207-3-9. [Google Scholar]
- Puig-Sirera, À.; Antichi, D.; Warren Raffa, D.; Rallo, G. Application of Remote Sensing Techniques to Discriminate the Effect of Different Soil Management Treatments over Rainfed Vineyards in Chianti Terroir. Remote Sens. 2021, 13, 716. [Google Scholar] [CrossRef]
- Pastonchi, L.; Gennaro, S.F.D.; Toscano, P.; Matese, A. Comparison between Satellite and Ground Data with UAV-Based Information to Analyse Vineyard Spatio-Temporal Variability: This Article Is Published in Cooperation with the XIIIth International Terroir Congress 17–18 November 2020, Adelaide, Australia. Guest Editors: Cassandra Collins and Roberta De Bei. OENO One 2020, 54, 919–934. [Google Scholar] [CrossRef]
- Pádua, L.; Marques, P.; Hruška, J.; Adão, T.; Peres, E.; Morais, R.; Sousa, J.J. Multi-Temporal Vineyard Monitoring through UAV-Based RGB Imagery. Remote Sens. 2018, 10, 1907. [Google Scholar] [CrossRef]
- Pádua, L.; Marques, P.; Adão, T.; Guimarães, N.; Sousa, A.; Peres, E.; Sousa, J.J. Vineyard Variability Analysis through UAV-Based Vigour Maps to Assess Climate Change Impacts. Agronomy 2019, 9, 581. [Google Scholar] [CrossRef]
- Rey-Caramés, C.; Diago, M.P.; Martín, M.P.; Lobo, A.; Tardaguila, J. Using RPAS Multi-Spectral Imagery to Characterise Vigour, Leaf Development, Yield Components and Berry Composition Variability within a Vineyard. Remote Sens. 2015, 7, 14458–14481. [Google Scholar] [CrossRef]
- Pádua, L.; Adão, T.; Sousa, A.; Peres, E.; Sousa, J.J. Individual Grapevine Analysis in a Multi-Temporal Context Using UAV-Based Multi-Sensor Imagery. Remote Sens. 2020, 12, 139. [Google Scholar] [CrossRef]
- Kliewer, W.M. Free Amino Acids and Other Nitrogenous Fractions in Wine Grapes. J. Food Sci. 1970, 35, 17–21. [Google Scholar] [CrossRef]
- Van Leeuwen, C.; Garnier, C.; Agut, C.; Baculat, B.; Barbeau, G.; Besnard, E.; Bois, B.; Boursiquot, J.-M.; Chuine, I.; Dessup, T.; et al. Heat Requirements for Grapevine Varieties Is Essential Information to Adapt Plant Material in a Changing Climate; Food and Agriculture Organization: Rome, Italy, 2008. [Google Scholar]
- Fernández-Guisuraga, J.M.; Sanz-Ablanedo, E.; Suárez-Seoane, S.; Calvo, L. Using Unmanned Aerial Vehicles in Postfire Vegetation Survey Campaigns through Large and Heterogeneous Areas: Opportunities and Challenges. Sensors 2018, 18, 586. [Google Scholar] [CrossRef] [PubMed]
- Pádua, L.; Guimarães, N.; Adão, T.; Sousa, A.; Peres, E.; Sousa, J.J. Effectiveness of Sentinel-2 in Multi-Temporal Post-Fire Monitoring When Compared with UAV Imagery. ISPRS Int. J. Geo-Inf. 2020, 9, 225. [Google Scholar] [CrossRef]
- Pádua, L.; Matese, A.; Di Gennaro, S.F.; Morais, R.; Peres, E.; Sousa, J.J. Vineyard Classification Using OBIA on UAV-Based RGB and Multispectral Data: A Case Study in Different Wine Regions. Comput. Electron. Agric. 2022, 196, 106905. [Google Scholar] [CrossRef]
- de Castro, A.I.; Peña, J.M.; Torres-Sánchez, J.; Jiménez-Brenes, F.M.; Valencia-Gredilla, F.; Recasens, J.; López-Granados, F. Mapping Cynodon Dactylon Infesting Cover Crops with an Automatic Decision Tree-OBIA Procedure and UAV Imagery for Precision Viticulture. Remote Sens. 2020, 12, 56. [Google Scholar] [CrossRef]
- Jurado, J.M.; Pádua, L.; Feito, F.R.; Sousa, J.J. Automatic Grapevine Trunk Detection on UAV-Based Point Cloud. Remote Sens. 2020, 12, 3043. [Google Scholar] [CrossRef]
- de Castro, A.I.; Jiménez-Brenes, F.M.; Torres-Sánchez, J.; Peña, J.M.; Borra-Serrano, I.; López-Granados, F. 3-D Characterization of Vineyards Using a Novel UAV Imagery-Based OBIA Procedure for Precision Viticulture Applications. Remote Sens. 2018, 10, 584. [Google Scholar] [CrossRef]
- Gennaro, S.F.D.; Battiston, E.; Marco, S.D.; Facini, O.; Matese, A.; Nocentini, M.; Palliotti, A.; Mugnai, L. Unmanned Aerial Vehicle (UAV)-Based Remote Sensing to Monitor Grapevine Leaf Stripe Disease within a Vineyard Affected by Esca Complex. Phytopathol. Mediterr. 2016, 55, 262–275. [Google Scholar] [CrossRef]
- Albetis, J.; Jacquin, A.; Goulard, M.; Poilvé, H.; Rousseau, J.; Clenet, H.; Dedieu, G.; Duthoit, S. On the Potentiality of UAV Multispectral Imagery to Detect Flavescence Dorée and Grapevine Trunk Diseases. Remote Sens. 2019, 11, 23. [Google Scholar] [CrossRef]
- Soubry, I.; Patias, P.; Tsioukas, V. Monitoring Vineyards with UAV and Multi-Sensors for the Assessment of Water Stress and Grape Maturity. J. Unmanned Veh. Syst. 2017, 5, 37–50. [Google Scholar] [CrossRef]
- Pádua, L.; Bernardo, S.; Dinis, L.-T.; Correia, C.; Moutinho-Pereira, J.; Sousa, J.J. The Efficiency of Foliar Kaolin Spray Assessed through UAV-Based Thermal Infrared Imagery. Remote Sens. 2022, 14, 4019. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | Acquisition Date | Data Source | Difference (Days) | Growth Stage | Bbch Code |
|---|---|---|---|---|---|
| April | 30 April 2021 | UAV | 4 | 1 (both plots) | 13 (plot A) 16 (plot B) |
| 4 May 2021 | Sentinel-2 | ||||
| May | 25 May 2021 | UAV | 4 | 5 (both plots) | 55 (plot A) 57 (plot B) |
| 29 May 2021 | Sentinel-2 | ||||
| June | 11 June 2021 | UAV | 3 | 6 (both plots) | 68 (plot A) 69 (plot B) |
| 8 June 2021 | Sentinel-2 | ||||
| July | 13 July 2021 | UAV | 0 | 7 (both plots) | 71 (plot A) 73 (plot B) |
| 13 July 2021 | Sentinel-2 | ||||
| August | 4 August 2021 | UAV | 7 | 7 (plot A) 8 (plot B) | 79 (plot A) 81 (plot B) |
| 28 July 2021 | Sentinel-2 | ||||
| September | 15 September 2021 | UAV | 6 | 8 (both plots) | 85 (plot A) 89 (plot B) |
| 21 September 2021 | Sentinel-2 |
| Plot | Scenario | April | May | June | July | August | September |
|---|---|---|---|---|---|---|---|
| Normalized difference vegetation index | |||||||
| A | Inter-row | 0.78 | 0.88 | 0.66 | 0.66 | 0.30 | 0.81 |
| Grapevine canopy | 0.17 | 0.57 | 0.59 | 0.63 | 0.41 | 0.71 | |
| All data | 0.78 | 0.87 | 0.63 | 0.66 | 0.49 | 0.84 | |
| B | Inter-row | 0.73 | 0.74 | 0.78 | 0.79 | 0.24 | 0.92 |
| Grapevine canopy | 0.23 | 0.62 | 0.61 | 0.24 | 0.02 | 0.78 | |
| All data | 0.79 | 0.87 | 0.77 | 0.75 | 0.55 | 0.93 | |
| Vegetation cover area | |||||||
| A | Inter-row | 0.69 | 0.80 | 0.67 | 0.15 | 0.05 | 0.10 |
| Grapevine canopy | 0.16 | ns | 0.06 | 0.19 | 0.47 | 0.69 | |
| All data | 0.56 | 0.84 | 0.61 | 0.14 | 0.42 | 0.42 | |
| B | Inter-row | 0.31 | 0.55 | 0.78 | 0.25 | 0.02 | 0.12 |
| Grapevine canopy | 0.35 | 0.30 | 0.11 | 0.29 | 0.68 | 0.77 | |
| All data | 0.70 | 0.81 | 0.80 | 0.28 | 0.52 | 0.68 | |
| Grapevine volume | |||||||
| A | Grapevine canopy | 0.19 | 0.01 | 0.08 | 0.26 | 0.42 | 0.73 |
| B | Grapevine canopy | 0.29 | 0.22 | 0.27 | 0.50 | 0.72 | 0.85 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stolarski, O.; Fraga, H.; Sousa, J.J.; Pádua, L. Synergistic Use of Sentinel-2 and UAV Multispectral Data to Improve and Optimize Viticulture Management. Drones 2022, 6, 366. https://doi.org/10.3390/drones6110366
Stolarski O, Fraga H, Sousa JJ, Pádua L. Synergistic Use of Sentinel-2 and UAV Multispectral Data to Improve and Optimize Viticulture Management. Drones. 2022; 6(11):366. https://doi.org/10.3390/drones6110366
Chicago/Turabian StyleStolarski, Oiliam, Hélder Fraga, Joaquim J. Sousa, and Luís Pádua. 2022. "Synergistic Use of Sentinel-2 and UAV Multispectral Data to Improve and Optimize Viticulture Management" Drones 6, no. 11: 366. https://doi.org/10.3390/drones6110366
APA StyleStolarski, O., Fraga, H., Sousa, J. J., & Pádua, L. (2022). Synergistic Use of Sentinel-2 and UAV Multispectral Data to Improve and Optimize Viticulture Management. Drones, 6(11), 366. https://doi.org/10.3390/drones6110366