




Research on Scenario Modeling for V-Tail Fixed-Wing UAV Dynamic Obstacle Avoidance

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Simulation System Framework
3. Fixed-Wing UAV Vehicle Modeling
3.1. Aircraft Aerodynamics
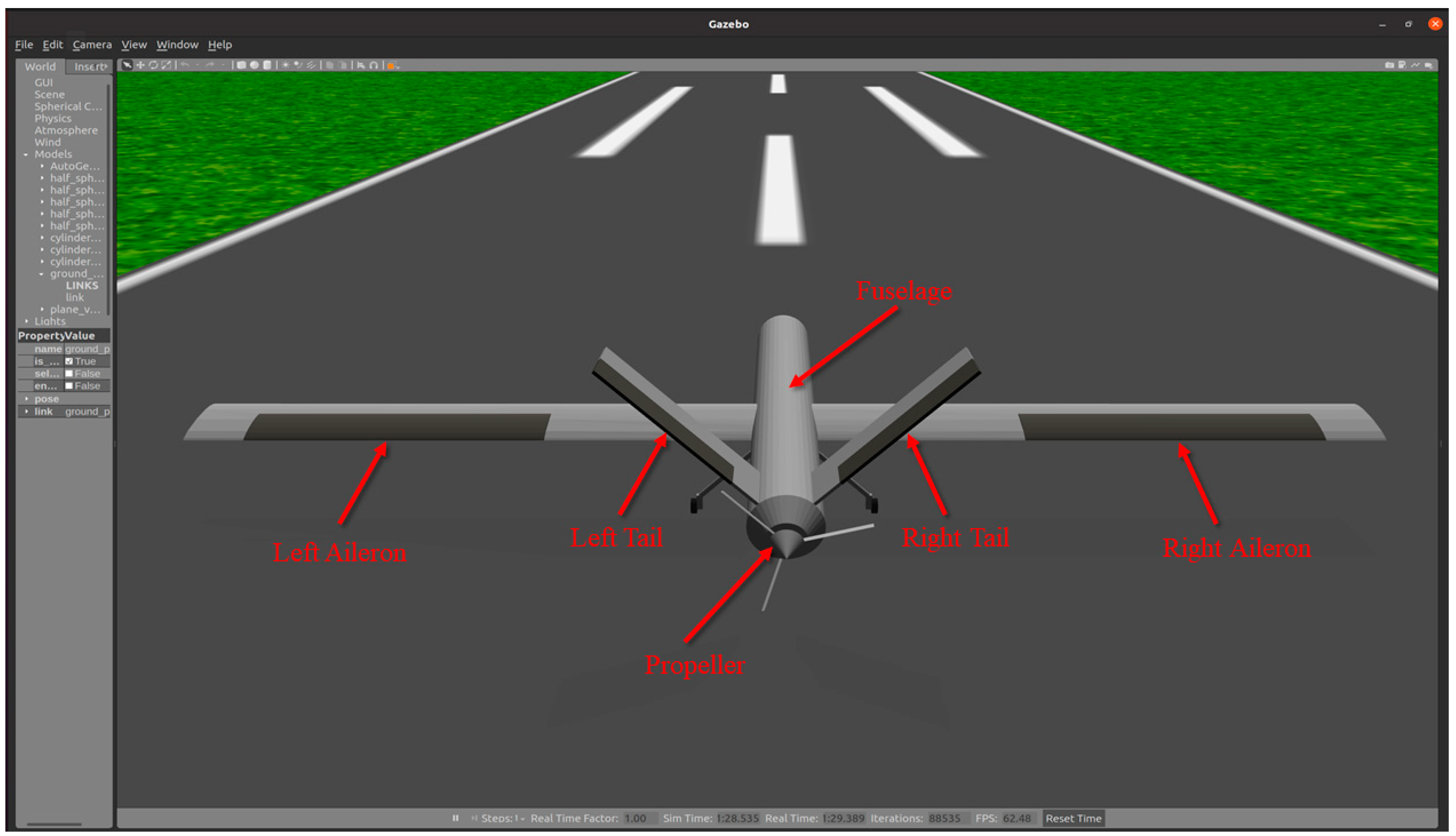
3.2. V-Tail Fixed-Wing UAV 3D Modeling
4. 3D Flight Environment Design
4.1. Wind Disturbance
4.2. Terrain Model
4.3. No-Fly Zones
5. Comprehensive Simulation
6. Conclusions
- (1)
- Develop trajectory planning and tracking algorithms for the research aircraft to achieve obstacle avoidance flight with minimal cost.
- (2)
- Investigate multi-aircraft formation flying algorithms, aiming to maintain formation while avoiding threat areas as effectively as possible.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Khan, M.U.; Khan, M.D.; Din, N.A.; Babar, M.Z.; Hussain, M.F. Aerodynamic Comparison of Unconventional Aircraft Tail Setup. In Proceedings of the 2019 22nd International Multitopic Conference (INMIC), Islamabad, Pakistan, 29–30 November 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Vatandas, O.E.; Anteplioglu, A. Aerodynamic performance comparison of V-tail and conventional tail for an unmanned vehicle. In Proceedings of the 2015 7th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 16–19 June 2015; pp. 655–658. [Google Scholar] [CrossRef]
- Zountouridou, E.; Kiokes, G.; Dimeas, A.; Prousalidis, J.; Hatziargyriou, N. A guide to unmanned aerial vehicles performance analysis—The MQ-9 unmanned air vehicle case study. J. Eng. 2023, 2023, e12270. [Google Scholar] [CrossRef]
- Kim, S.; Park, J.; Yun, J.-K.; Seo, J. Motion Planning by Reinforcement Learning for an Unmanned Aerial Vehicle in Virtual Open Space with Static Obstacles. In Proceedings of the 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2020; pp. 784–787. [Google Scholar] [CrossRef]
- Rivera, Z.B.; De Simone, M.C.; Guida, D. Unmanned Ground Vehicle Modelling in Gazebo/ROS-Based Environments. Machines 2019, 7, 42. [Google Scholar] [CrossRef]
- Sokolov, M.; Lavrenov, R.; Gabdullin, A.; Afanasyev, I.; Magid, E. 3D modelling and simulation of a crawler robot in ROS/Gazebo. In Proceedings of the 4th International Conference on Control, Mechatronics and Automation, Barcelona, Spain, 7–11 December 2016; pp. 61–65. [Google Scholar]
- Bingham, B.; Agüero, C.; McCarrin, M.; Klamo, J.; Malia, J.; Allen, K.; Lum, T.; Rawson, M.; Waqar, R. Toward Maritime Robotic Simulation in Gazebo. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Niu, C.; Yan, X.; Chen, B. Control-oriented modeling of a high-aspect-ratio flying wing with coupled flight dynamics. Chin. J. Aeronaut. 2023, 36, 409–422. [Google Scholar] [CrossRef]
- Jayaraman, B.; Saini, V.K.; Ghosh, A.K. Robust Time-Delayed PID Flight Control for Automatic Landing Guidance under Actuator Loss-Of-Control. IFAC-PapersOnLine 2022, 55, 189–194. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, Q.; Pan, Y. Neural network based dynamic surface control of hypersonic flight dynamics using small-gain theorem. Neurocomputing 2016, 173, 690–699. [Google Scholar] [CrossRef]
- Morton, S.A.; McDaniel, D.R. A Fixed-Wing Aircraft Simulation Tool for Improving DoD Acquisition Efficiency. Comput. Sci. Eng. 2016, 18, 25–31. [Google Scholar] [CrossRef]
- Deiler, C.; Kilian, T. Dynamic aircraft simulation model covering local icing effects. CEAS Aeronaut. J. 2018, 9, 429–444. [Google Scholar] [CrossRef]
- Heesbeen, B.; Ruigrok, R.; Hoekstra, J. GRACE-a Versatile Simulator Architecture Making Simulation of Multiple Complex Aircraft Simple. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; p. 6477. [Google Scholar]
- Aschauer, G.; Schirrer, A.; Kozek, M. Co-simulation of matlab and flightgear for identification and control of aircraft. IFAC-PapersOnLine 2015, 48, 67–72. [Google Scholar] [CrossRef]
- Yang, L.; Hu, B.; Fu, J.; Fu, Y. Research on Longitudinal Control and Visual Simulation System for Civil Aircraft Based on Simulink/FlightGear. In Proceedings of the 2022 Chinese Intelligent Systems Conference. CISC 2022, Beijing, China, 15–16 October 2022; Lecture Notes in Electrical Engineering. Jia, Y., Zhang, W., Fu, Y., Zhao, S., Eds.; Springer: Singapore, 2022; Volume 951. [Google Scholar] [CrossRef]
- Rostami, M.; Kamoonpuri, J.; Pradhan, P.; Chung, J. Development and Evaluation of an Enhanced Virtual Reality Flight Simulation Tool for Airships. Aerospace 2023, 10, 457. [Google Scholar] [CrossRef]
- Marianandam, P.A.; Ghose, D. Vision based alignment to runway during approach for landing of fixed wing uavs. IFAC Proc. Vol. 2014, 47, 470–476. [Google Scholar] [CrossRef]
- Henry, D. Application of the H∞ control theory to space missions in engineering education. IFAC-PapersOnLine 2020, 53, 17132–17137. [Google Scholar] [CrossRef]
- Horri, N.; Pietraszko, M. A Tutorial and Review on Flight Control Co-Simulation Using Matlab/Simulink and Flight Simulators. Automation 2022, 3, 486–510. [Google Scholar] [CrossRef]
- Bittar, A.; Figuereido, H.V.; Guimaraes, P.A.; Mendes, A.C. Guidance Software-In-the-Loop simulation using X-Plane and Simulink for UAVs. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 993–1002. [Google Scholar] [CrossRef]
- Çetin, E.; Kutay, A.T. Automatic landing flare control design by model-following control and flight test on X-Plane flight simulator. In Proceedings of the 2016 7th International Conference on Mechanical and Aerospace Engineering (ICMAE), London, UK, 18–20 July 2016; pp. 416–420. [Google Scholar] [CrossRef]
- Aláez, D.; Olaz, X.; Prieto, M.; Porcellinis, P.; Villadangos, J. HIL Flight Simulator for VTOL-UAV Pilot Training Using X-Plane. Information 2022, 13, 585. [Google Scholar] [CrossRef]
- Yang, J.; Thomas, A.G.; Singh, S.; Baldi, S.; Wang, X. A Semi-Physical Platform for Guidance and Formations of Fixed-Wing Unmanned Aerial Vehicles. Sensors 2020, 20, 1136. [Google Scholar] [CrossRef] [PubMed]
- Irmawan, E.; Harjoko, A.; Dharmawan, A. Model, Control, and Realistic Visual 3D Simulation of VTOL Fixed-Wing Transition Flight Considering Ground Effect. Drones 2023, 7, 330. [Google Scholar] [CrossRef]
- Lee, J.; Spencer, J.; Paredes, J.A.; Ravela, S.; Bernstein, D.S.; Goel, A. An adaptive digital autopilot for fixed-wing aircraft with actuator faults. arXiv 2021, arXiv:2110.11390. [Google Scholar]
- Lee, J.; Spencer, J.; Shao, S.; Paredes, J.A.; Bernstein, D.S.; Goel, A. Experimental Flight Testing of a Fault-Tolerant Adaptive Autopilot for Fixed-Wing Aircraft. In Proceedings of the 2023 American Control Conference (ACC), San Diego, CA, USA, 31 May–2 June 2023; pp. 2981–2986. [Google Scholar] [CrossRef]
- Ellingson, G.; McLain, T. ROSplane: Fixed-wing autopilot for education and research. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1503–1507. [Google Scholar] [CrossRef]
- Stevens, B.L.; Lewis, F.L.; Johnson, E.N. Aircraft Control and Simulation: Dynamics, Controls Design, and Autonomous Systems; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Babister, A.W. Aircraft Dynamic Stability and Response: Pergamon International Library of Science, Technology, Engineering and Social Studies; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Sinha, N.K.; Ananthkrishnan, N. Elementary Flight Dynamics with an Introduction to Bifurcation and Continuation Methods; CRC Press: Boca Raton, FL, USA, 2021. [Google Scholar]
- SolidWorks to URDF Exporter. Available online: https://wiki.ros.org/sw_urdf_exporter (accessed on 15 July 2023).
- Convert URDF to SDF. Available online: https://answers.gazebosim.org//question/2282/convert-urdf-to-sdf-or-load-urdf/ (accessed on 15 July 2023).
- Gazebo’s Aerodynamics Tutorial. Available online: https://classic.gazebosim.org/tutorials?tut=aerodynamics&cat=physics (accessed on 25 August 2023).
- Moorhouse, D.J.; Woodcock, R.J. Background Information and User Guide for MIL-F-8785C, Military Specification: Flying Qualities of Piloted Airplanes. 1982. Available online: https://apps.dtic.mil/sti/citations/tr/ADA119421 (accessed on 10 September 2023).





















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, P.; Tang, Y.; Yang, B.; Wang, T. Research on Scenario Modeling for V-Tail Fixed-Wing UAV Dynamic Obstacle Avoidance. Drones 2023, 7, 601. https://doi.org/10.3390/drones7100601
Huang P, Tang Y, Yang B, Wang T. Research on Scenario Modeling for V-Tail Fixed-Wing UAV Dynamic Obstacle Avoidance. Drones. 2023; 7(10):601. https://doi.org/10.3390/drones7100601
Chicago/Turabian StyleHuang, Peihao, Yong Tang, Bingsan Yang, and Tao Wang. 2023. "Research on Scenario Modeling for V-Tail Fixed-Wing UAV Dynamic Obstacle Avoidance" Drones 7, no. 10: 601. https://doi.org/10.3390/drones7100601
APA StyleHuang, P., Tang, Y., Yang, B., & Wang, T. (2023). Research on Scenario Modeling for V-Tail Fixed-Wing UAV Dynamic Obstacle Avoidance. Drones, 7(10), 601. https://doi.org/10.3390/drones7100601