
Complementarity, Interoperability, and Level of Integration of Humanitarian Drones with Emerging Digital Technologies: A State-of-the-Art Systematic Literature Review of Mathematical Models



Abstract
:1. Introduction
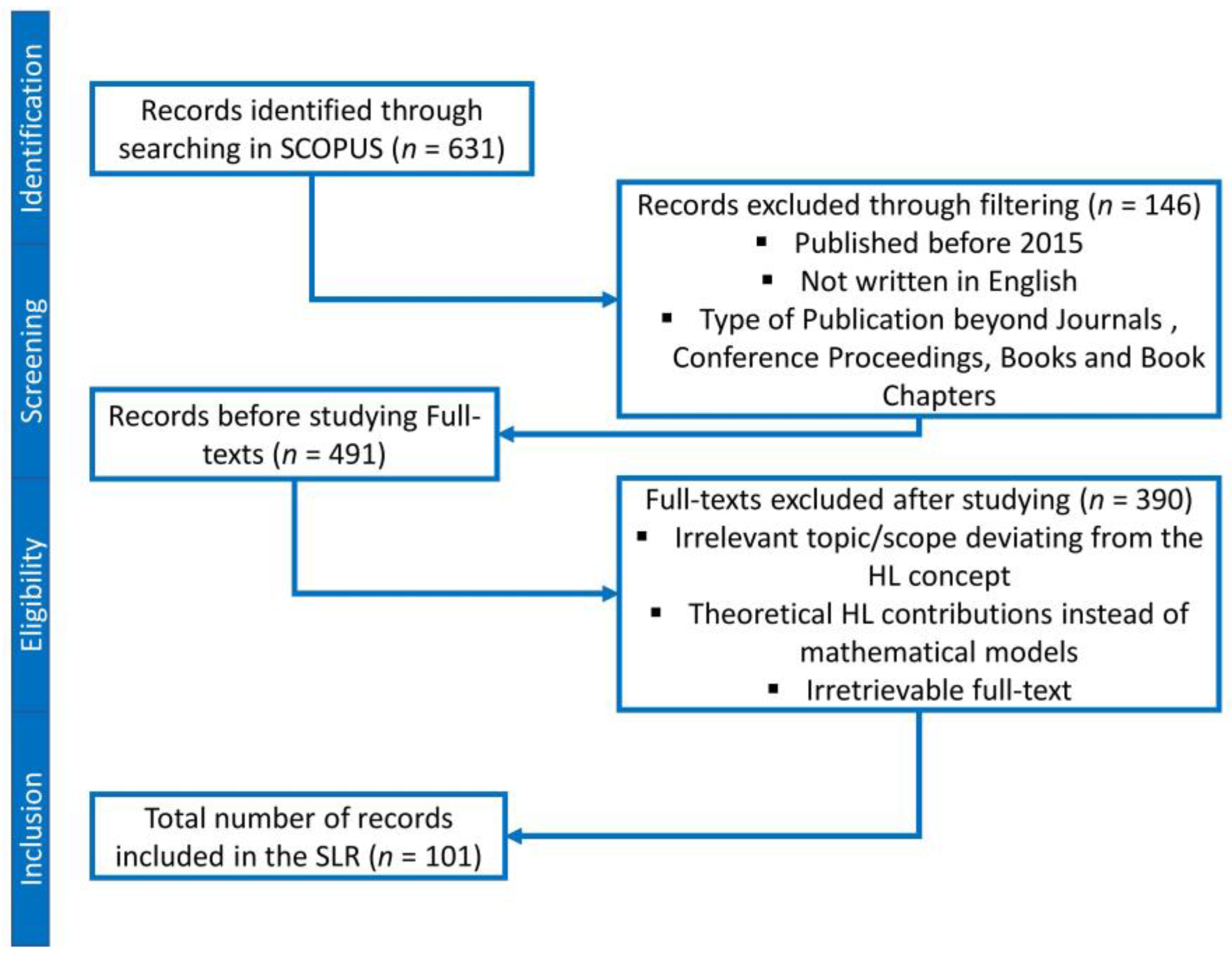
2. Research Methodology: Systematic Literature Review
2.1. Planning
- ✓
- There have been multiple literature reviews concentrating on the integration of emerging technologies in HL operations, the majority of which, nevertheless, have focused on the enablers of drones [5] and other DTs [7,18,28,37,38,39,40,41] as standalone solutions. In fact, publications synthesizing previous research on how different DTs have been applied in tandem with drones in HL are scarce and not inclusive enough. For instance, such reviews include [42], where the coordination of drones with wireless sensor networks (WSNs); the IoT; edge, fog, and cloud computing for data gathering; and communication provision in DM was discussed. Other researchers [43] examined combined drone–truck operations for various types of drone problems in civil applications, including but not emphasizing HL. To the best of our knowledge, no study has so far holistically investigated and systematically appraised the complementarity and interoperability of drones with other emerging DTs across various disaster scenarios, types, and stages.
- ✓
- The various types of drone problems have been the subject of much research conducted in the context of civil applications, as seen in [43], where original studies of different types of drone operations were brought together and analyzed. However, such analysis in the context of HL has been overlooked.
- ✓

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Drones | DTs | Drones in Tandem with DTs | Contributions: This Paper Reviews… | Technology-/Model-Oriented Future Research Directions Should Address… | HL Context | Non-HL Context |
|---|---|---|---|---|---|---|---|
| [44,45,46,47] | - | - | - | Mathematical models developed in the field of HL. | The need for the use of metaheuristics to alleviate models’ computational burdens and enable them to be used in actual disasters and filtered down into policy, practice, and procedures. The lack of holistic approaches. The infancy of technology use. The lack of use of real-time data. Narrow variety of modeling objectives. | X | - |
| [48] | X | - | - | Optimization problems arising in the operations planning of drones in civil applications. | Dynamic planning schemes for a range of relevant drone operations fulfilling a set of desired criteria. Approaches to deal with data uncertainty. Drone design to optimize performance, practicality, and economics. The incorporation of demand into planning models. How individual beliefs and experience impact purchasing decisions of drone technology and services, and the ways in which drones are used as well as the perceived benefit. | - | X |
| [49,50] | X | - | - | Trajectory and routing optimization models based on the usage of drones. | Other types of optimization problems in addition to routing ones, such as task assignments. Modeling energy consumption and kinematics, which need further investigation. | X | X |
| [6,7] | - | X | - | Big data in HL. | The better understanding of the environmental and social aspects of HL through big data. Big-data-assisted social media analytics. The combination of stakeholder and institutional theory from the perspective of big data use. Cost–benefit analysis of maintaining viable practices based on big data. The shift of focus from descriptive and diagnostic to predictive analytics. Improving big data quality. Securing privacy and security when integrating big data with cloud computing. | X | - |
| [43] | X | - | X | Optimization issues related to drone and drone–truck operations, including mathematical models, solution methods, synchronization between a drone and a truck, and implementation barriers. | Incorporating uncertainty. Relaxing operational constraints. Improving modeling techniques and solution methodologies. Addressing mixed-fleet arc routing problems. | X | X |
| [5] | X | - | - | Potential of drones and their role to provide operational tools for emergency responders during disastrous situations. Three important capabilities, three performance outcomes, and adoption barriers in three areas were identified. | Investigating drones’ complementarity and interoperability with other emerging DTs, such as IoT, AI, blockchain, and big data analytics, other than drones as a standalone solution. | X | - |
| [37] | X | X | - | DTs (IoT, AI, blockchain, drones, cloud computing, big data, social media, 3D printing, robotics, AR, VR etc.) in the humanitarian supply chain (HSC) domain and their role in terms of main objectives, application domains, and deployment phases within the HSC framework. | The collection of insights from various stakeholders to explore multiple perspectives on the novelty of a specific DT within the HSC context and potentially discover new processes, methods, organizational structures, and managerial frameworks for HL operations. | X | |
| [42] | X | - | X | Data collection through drones and communication provision through drone-assisted ground technologies (WSN, IoT, and edge and fog computing) and their coordination for DM. | Challenges UAVs are faced with in disaster communication scenarios such as delay, coverage, quality of service (QoS) requirements, channel models, and UAV positioning and interference problems. | X | - |
| [28] | - | X | - | Blockchain technology in HL. | The integration of optimization models. The lack of empirical evidence. Testing simulation scenarios before performing real-life implementations. | X | - |
| [41] | X | X | - | DTs (IoT, image processing, AI, big data, smartphone applications, etc.) that are in use and have been proposed for DM of urban regions. | Systematization and standardization. A global database on the application of technology for HL that will act as a roadmap, highlighting the relevance of each technology as per the scenario. Training on technology. A better understanding of the legal implications of technology, data protection, privacy laws, etc. | X | - |
2.2. Searching
2.3. Screening
2.4. Extraction
3. Descriptive Analysis
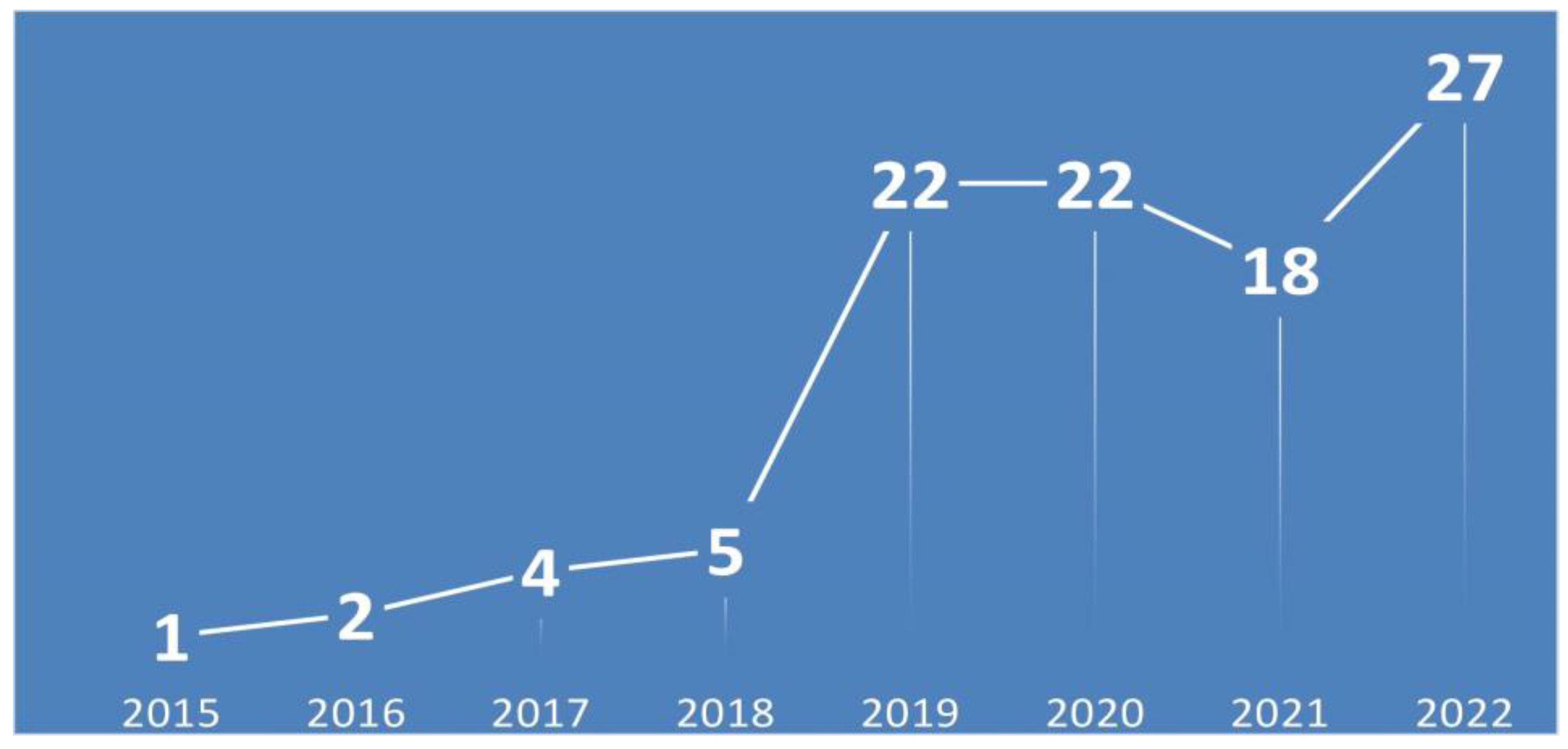
3.1. Number of Publications (Per Year, 2015–2022)
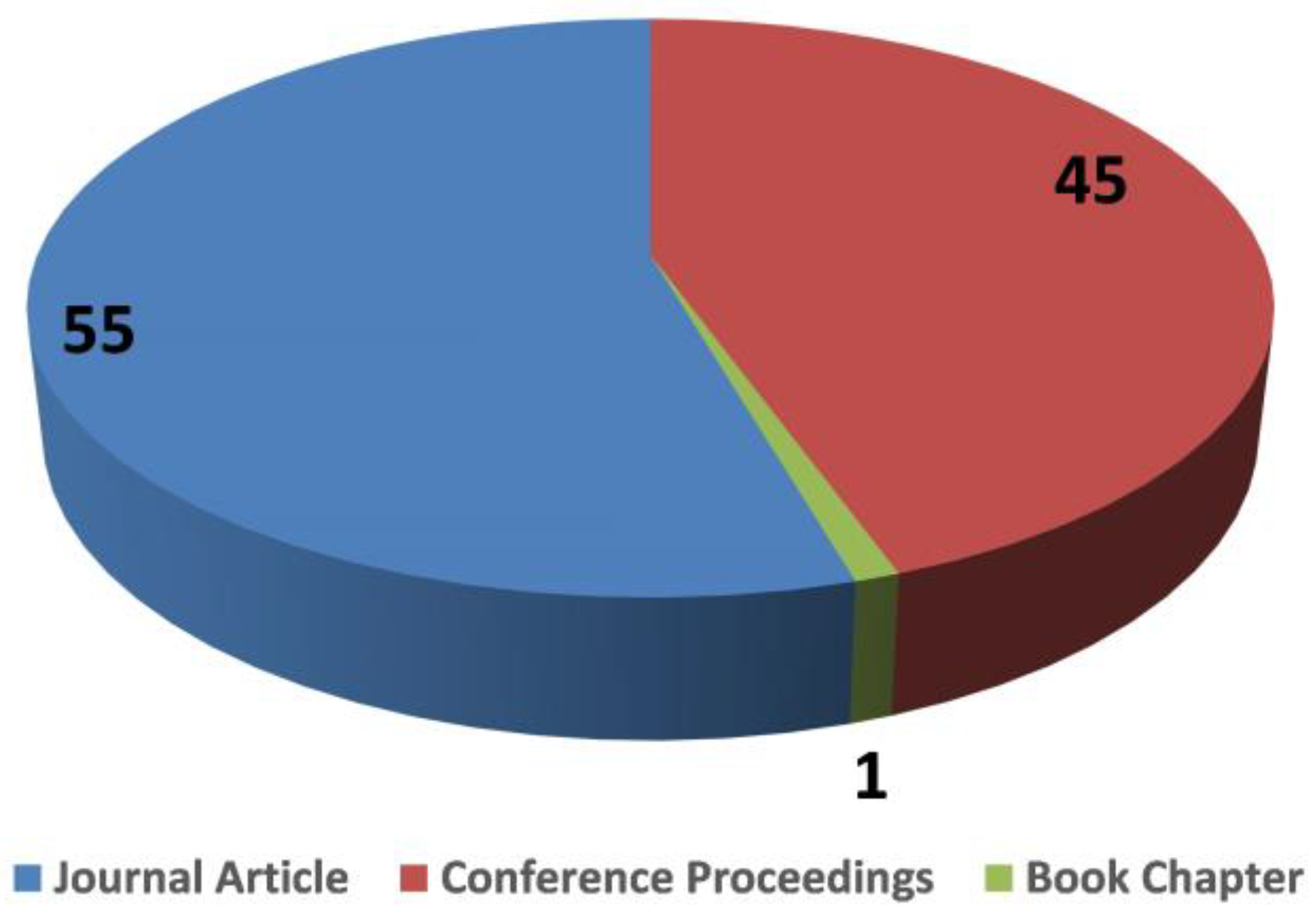
3.2. Number of Publications (Per Type)
3.3. Number of Publications (Per Publishing Source)
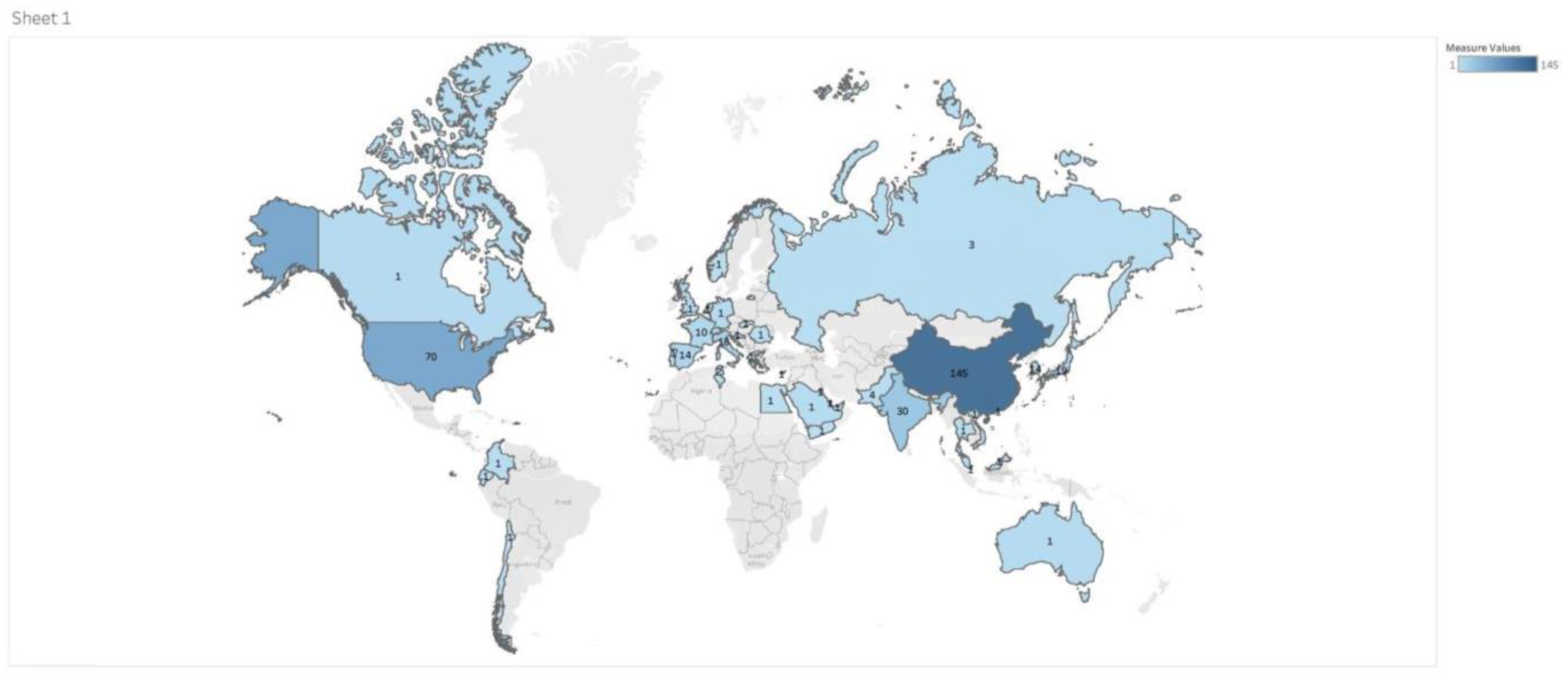
3.4. Geographical Distribution of Authors
4. Coding Criteria Taxonomy
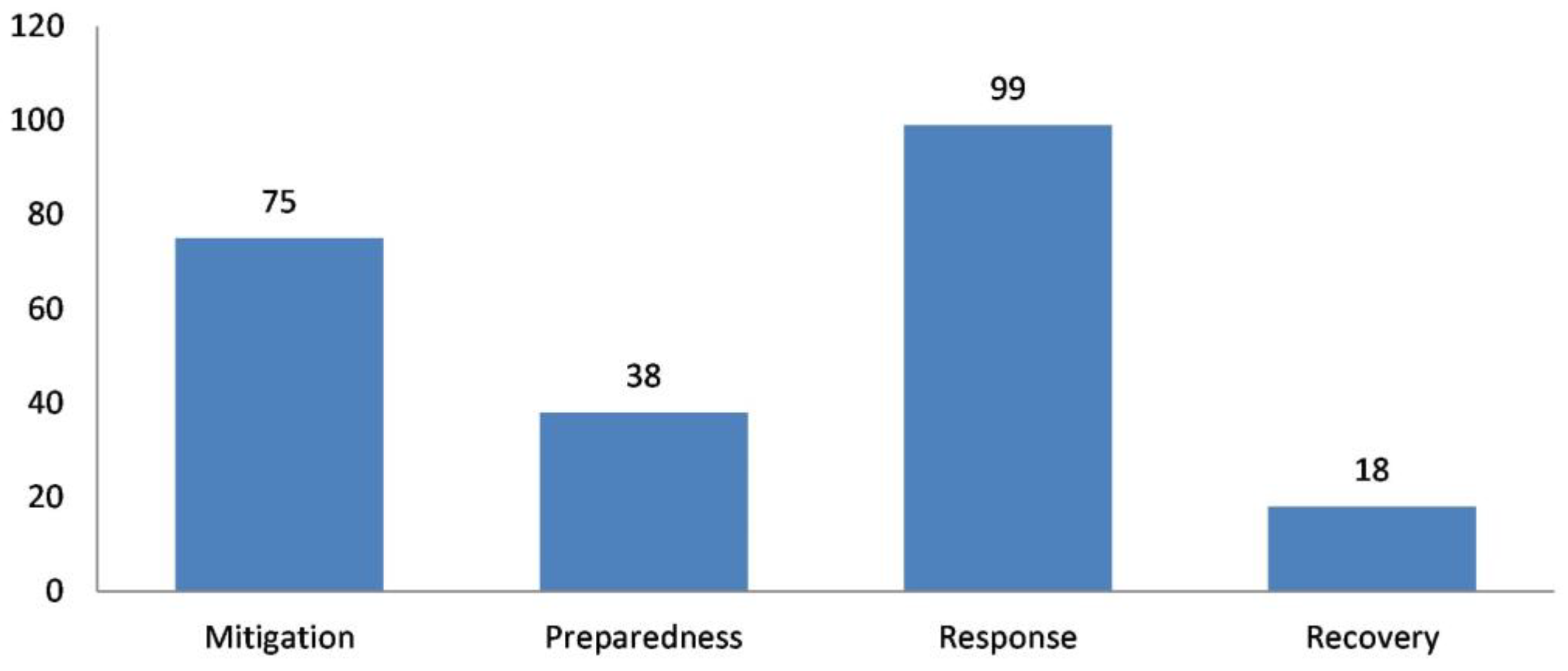
4.1. Disaster Phases and Types
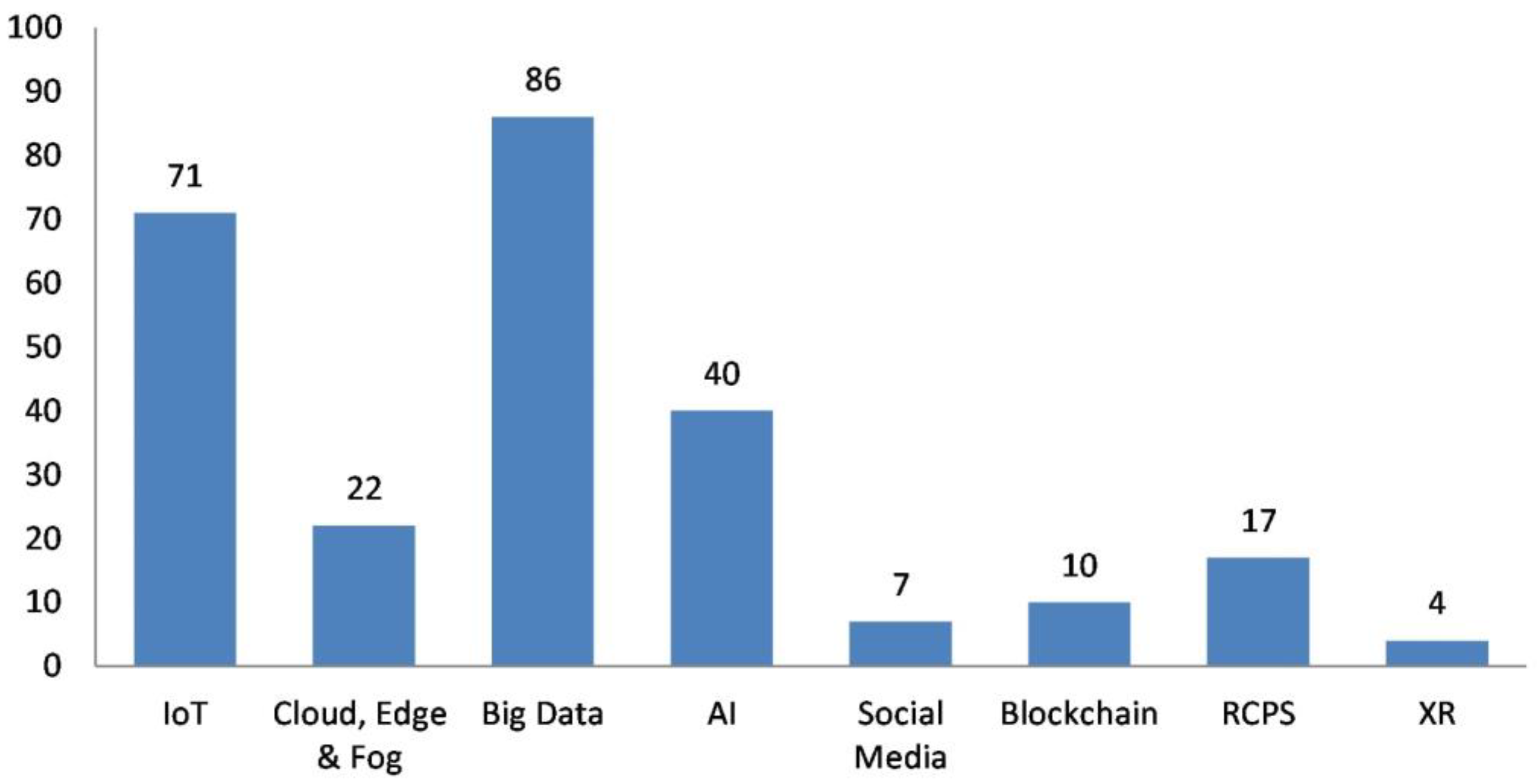
4.2. Humanitarian Digital Technologies (HDTs)
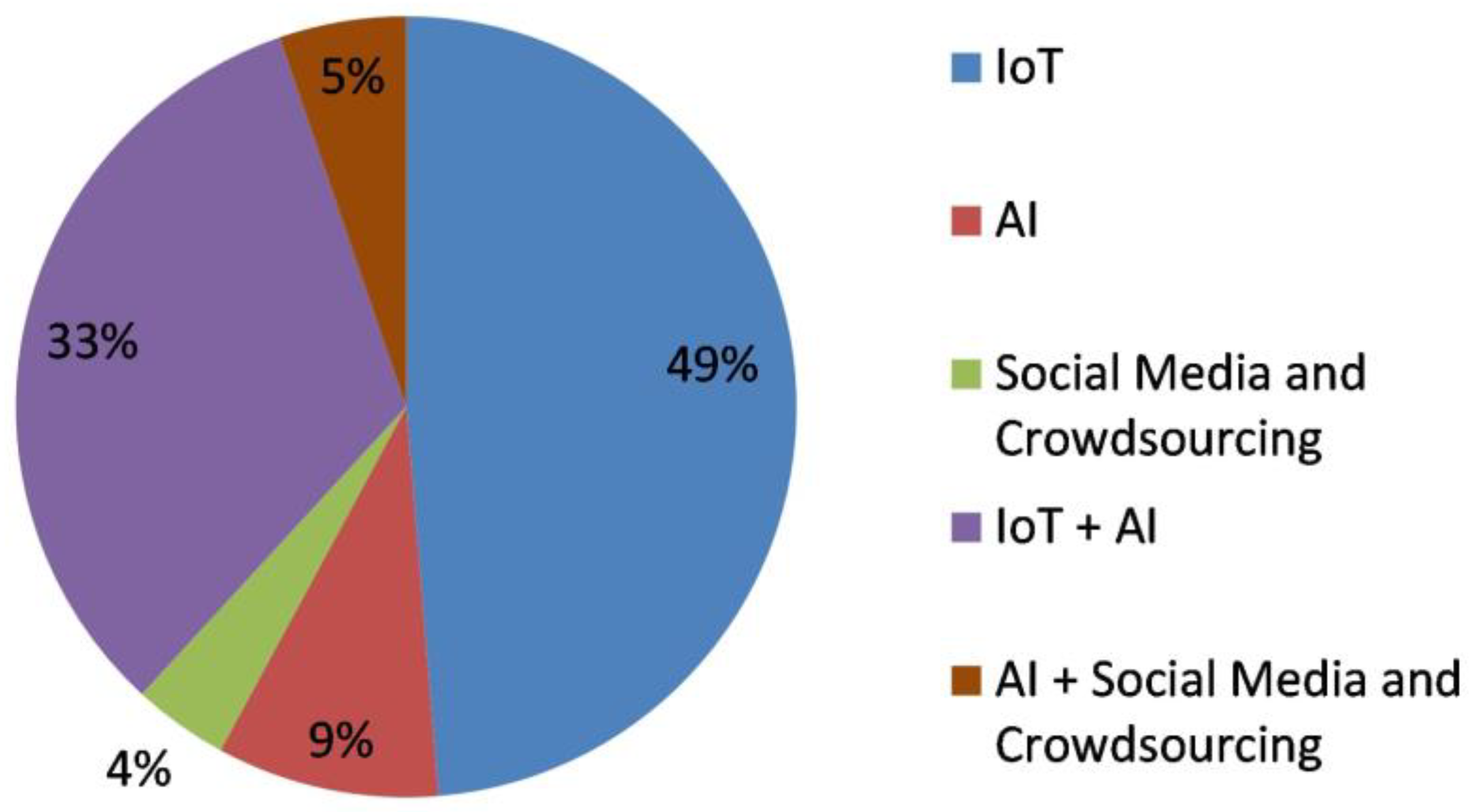
4.2.1. IoT
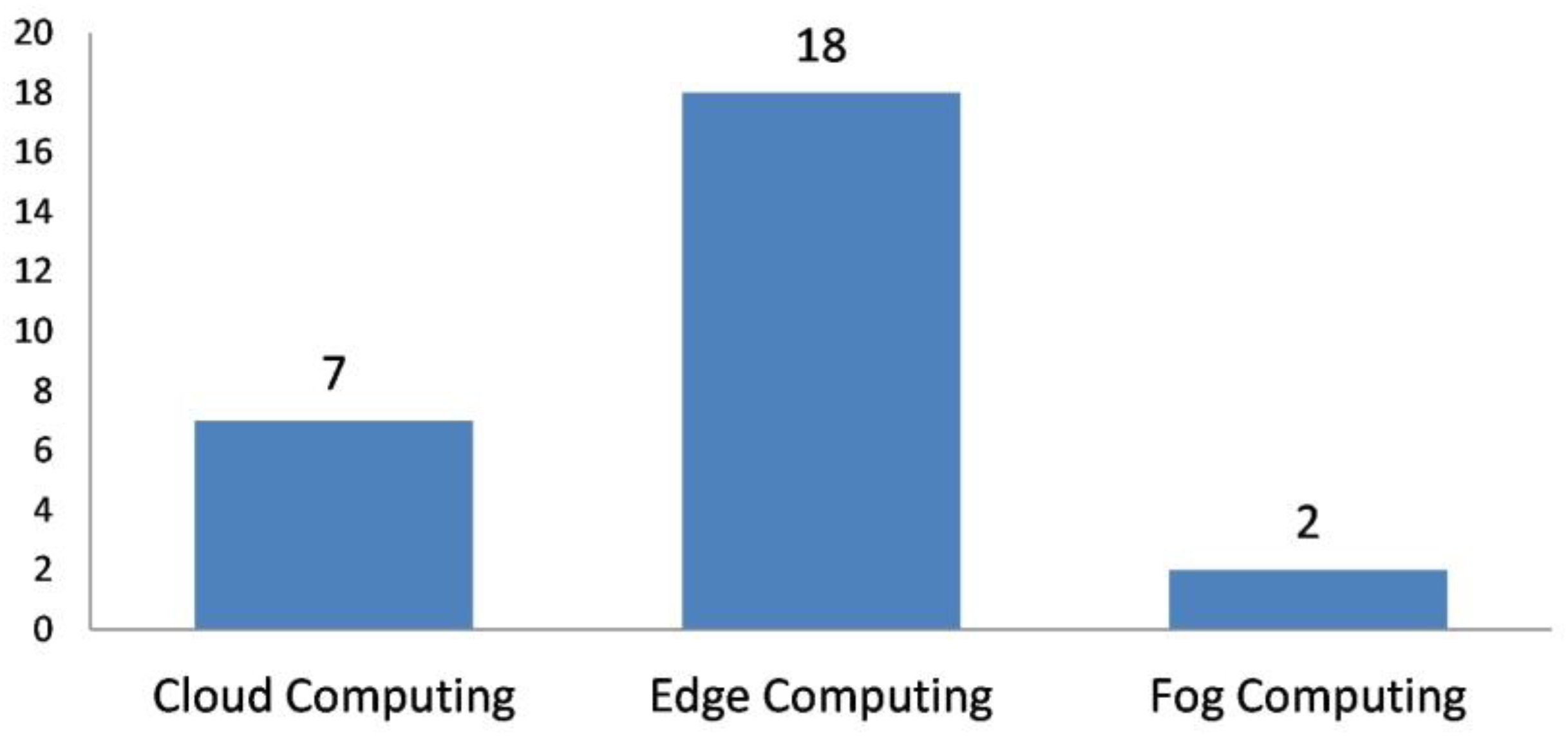
4.2.2. Cloud, Edge, and Fog Computing
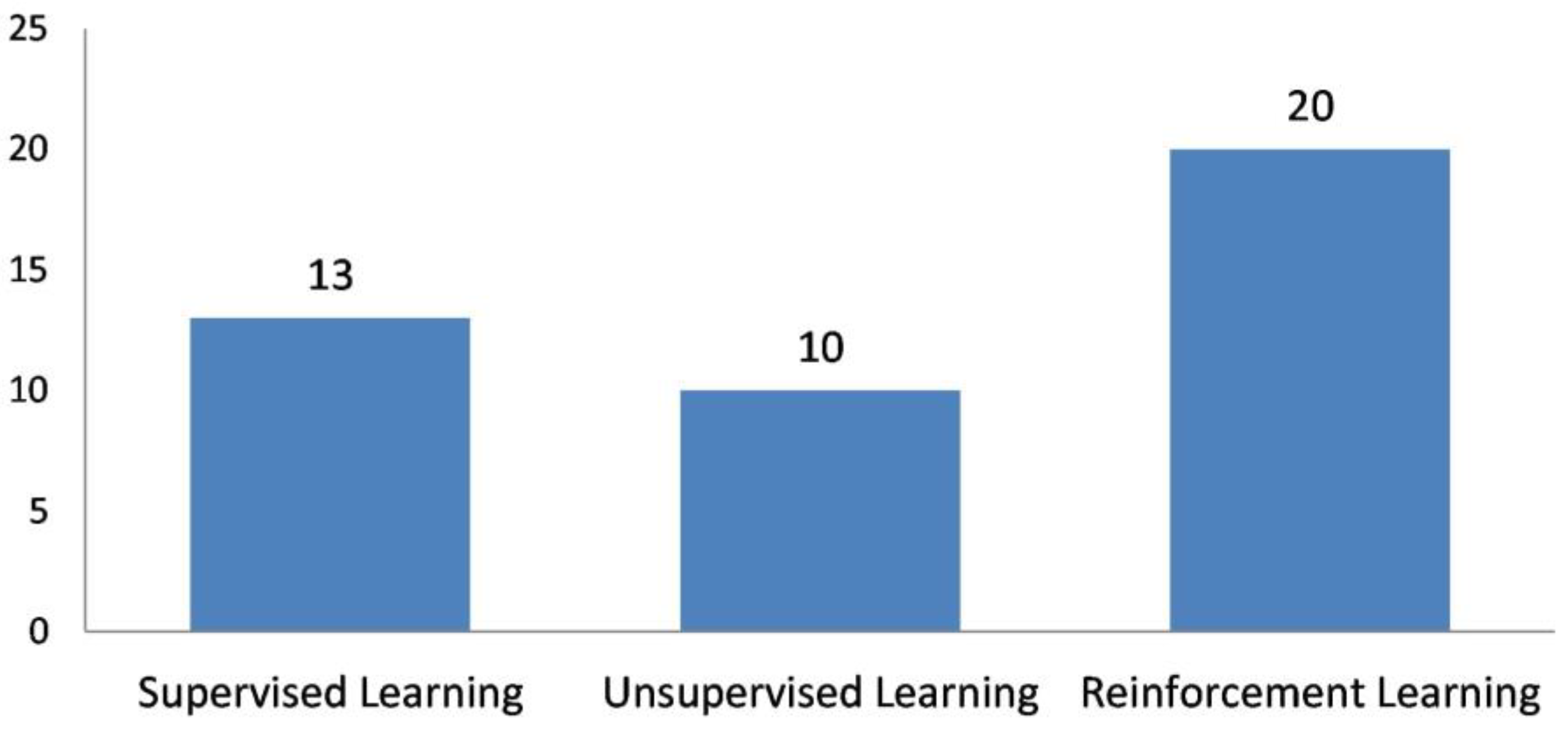
4.2.3. AI
4.2.4. Social Media and Crowdsourcing
4.2.5. Big Data Analytics
4.2.6. RCPSs
4.2.7. Blockchain Technology
4.2.8. XR
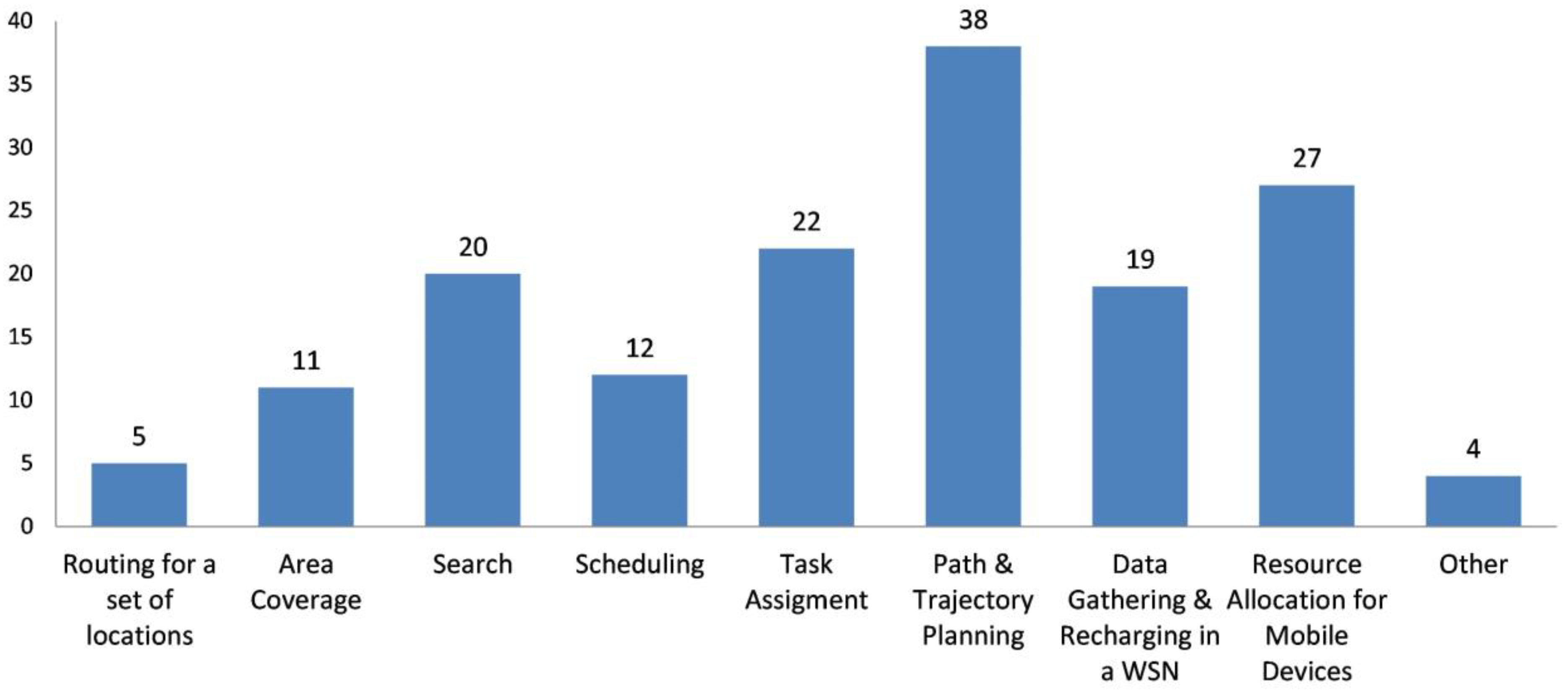
4.3. Humanitarian Drone Operations (HDOs) and Capabilities (HDCs)
4.3.1. Area Coverage
4.3.2. Search
4.3.3. Routing for a Set of Locations
4.3.4. Path Planning and Trajectory Planning
4.3.5. Task Assignment
4.3.6. Scheduling
4.3.7. Data Gathering and Recharging in a WSN
4.3.8. Resource Allocation for Mobile Devices
4.3.9. Other
4.4. Solving Approaches
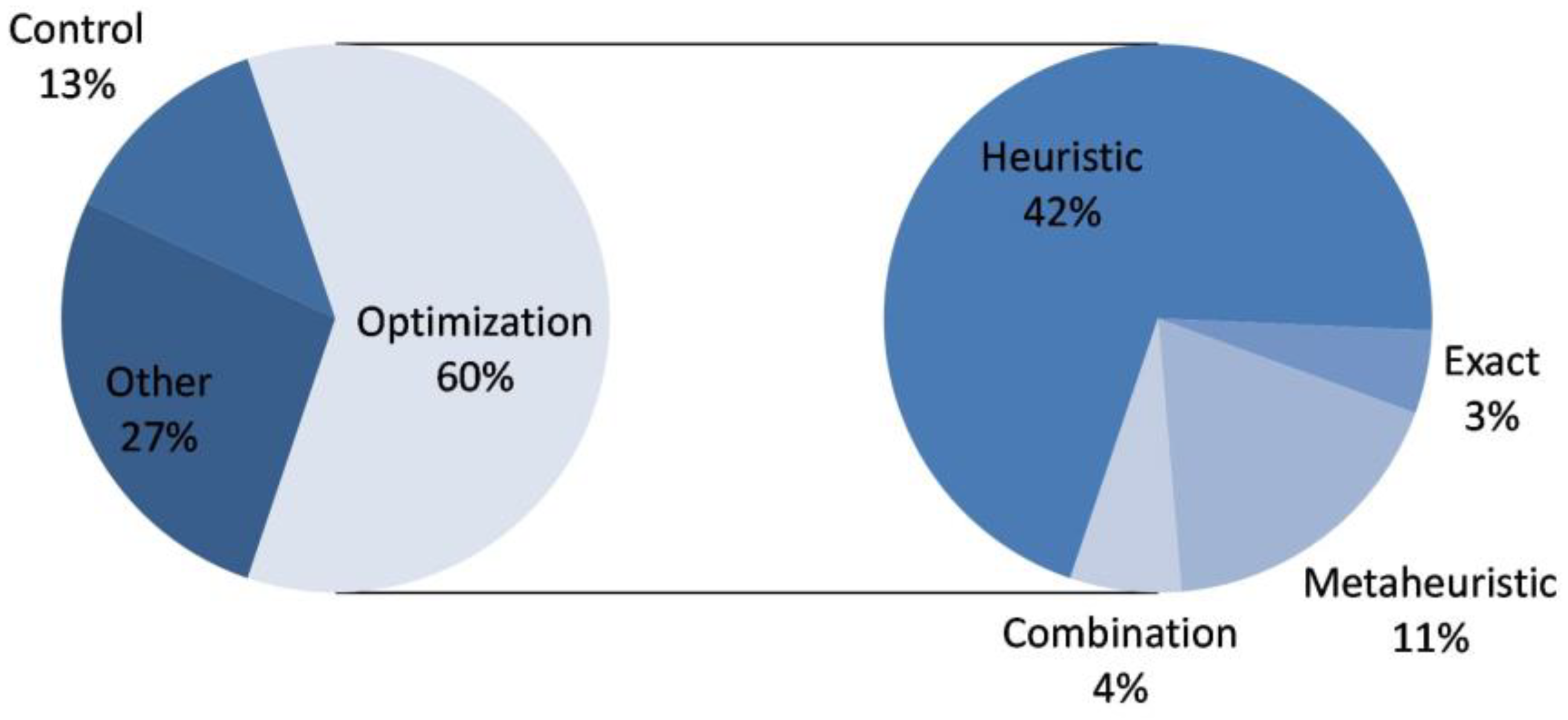
4.4.1. Optimization Models
4.4.2. Control Models
5. Material Evaluation
5.1. Which Disaster Phases and Types Have Been Discussed? What Emerging Technologies Are Being Used?
5.2. How Emerging DTs Have Started to Complement and Operate in Tandem with Drones in HL Literature?
5.2.1. IoT
5.2.2. Cloud, Edge, and Fog Computing
5.2.3. Social Media and Crowdsourcing
5.2.4. AI
5.2.5. Big Data Analytics
5.2.6. RCPSs
5.2.7. Blockchain Technology
5.2.8. XR
5.3. What Drone Operations Have Been Examined and What Drone Capabilities Have Been Used? How Are Drone Operations Approached by Each DT?
5.3.1. Path and Trajectory Planning
5.3.2. Scheduling
5.3.3. Task Assignment
5.3.4. Search
5.3.5. Area Coverage
5.3.6. Data Gathering and Recharging in a WSN
5.3.7. Resource Allocation for Mobile Devices
5.3.8. Routing for a Set of Locations
5.3.9. Other
5.4. How Are the Mathematical Models Different? What Types of Solving Approaches Have Been Proposed?
5.4.1. Optimization Models
5.4.2. Control Models
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| Reference | # of Papers in the Sample | Reference (Cont.) | # of Papers in the Sample (Cont.) |
|---|---|---|---|
| [238] | 9 | [239] | 66 |
| [33] | 17 | [240] | 74 |
| [241] | 23 | [242] | 78 |
| [243] | 25 | [244] | 81 |
| [245] | 25 | [47] | 83 |
| [7] | 28 | [246] | 83 |
| [247] | 28 | [248] | 88 |
| [249] | 31 | [250] | 88 |
| [251] | 31 | [44] | 94 |
| [252] | 32 | [253] | 100 |
| [254] | 36 | [37] | 110 |
| [255] | 45 | [256] | 123 |
| [257] | 46 | [258] | 126 |
| [259] | 47 | [5] | 142 |
| [260] | 51 | [261] | 152 |
| [262] | 52 | [231] | 174 |
| [263] | 52 | [264] | 178 |
| [265] | 53 | [266] | 207 |
| [38] | 61 | [267] | 228 |
| [28] | 64 | [36] | 362 |
| Category | Abbreviation | Details |
|---|---|---|
| Disaster Phase | M | Mitigation |
| P | Preparedness | |
| Res | Response | |
| Rec | Recovery | |
| Disaster Type | N | Natural disaster |
| HM | Human-made disaster | |
| Solving Approach | Opt | Optimization modeling |
| Ex | Exact solution or closed form solution | |
| H | Heuristic algorithm solution apart from metaheuristic algorithms | |
| MH | Metaheuristic algorithms solution | |
| Co | Control theory and algorithms | |
| OM | Other mathematical models | |
| Game | Game theory (convergence to a Nash equilibrium or Stackelberg equilibrium, minority games, game engine theory, stochastic game/Markov game, matching game theory, bottom-up game theory) | |
| BnB, DP, LR | Branch-and-bound, dynamic programming, Lagrangian relaxation algorithms, respectively | |
| Subject of Planning | SD | Single drone |
| MD | Multiple drones | |
| Vehicle Considerations | LF | Limited flight time/distance/payload/maximum speed/climb (descent) rate/fixed location, or height/coverage radius/intercoverage distance/fixed speed |
| EqM | Equations of motion including minimum turning radius, curvature continuity constraint, maximum climbing angle constraint, and other system dynamics constraints | |
| EC | Energy consumption consideration | |
| CTC | Communication/transmission consideration | |
| S | Sensor related consideration (e.g., limited footprint distance/angle from device, distance between devices) | |
| SF | Safety concerns (presence of obstacles, collision concerns) | |
| W | Weather considerations | |
| HG | Heterogeneous vehicles, heterogeneous capabilities | |
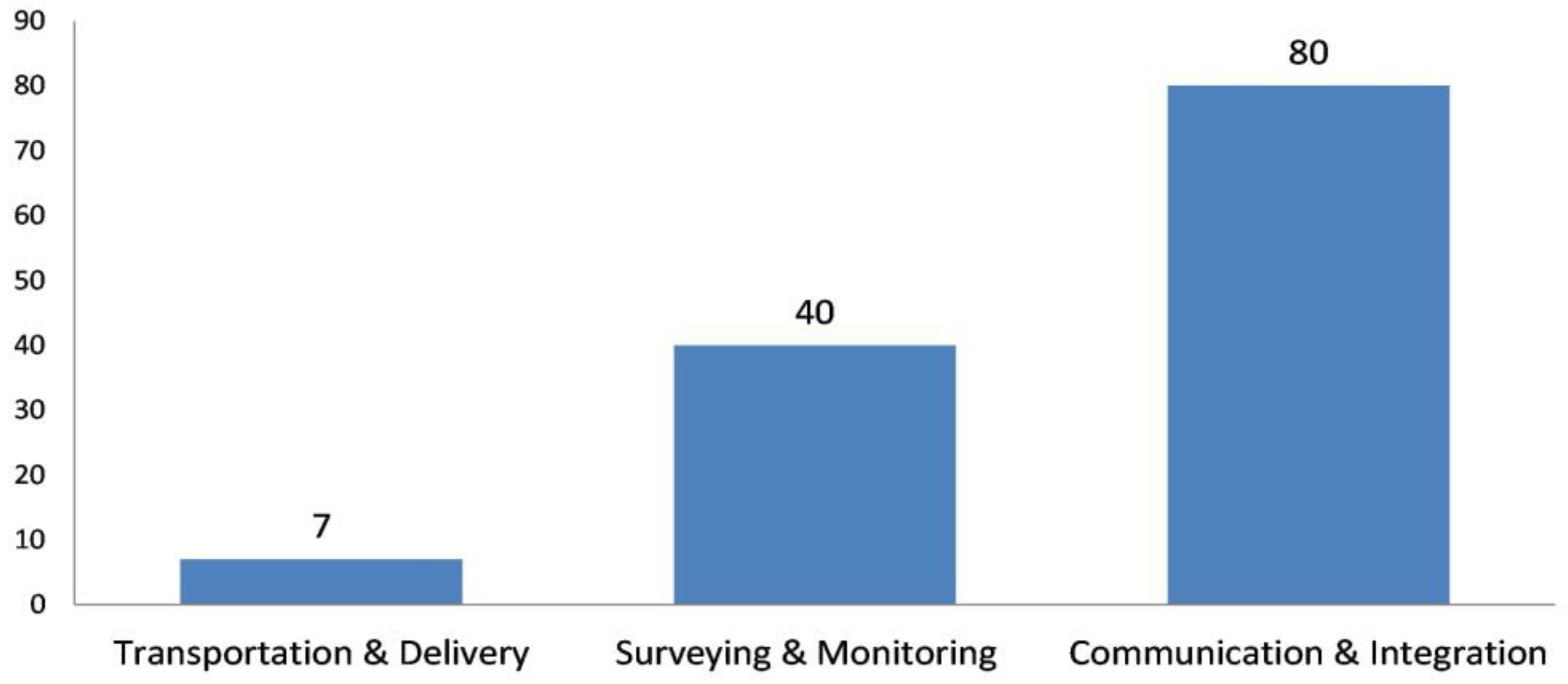
| HDCs. | Tran | Transportation and delivery capabilities |
| Mon | Surveying and monitoring capabilities | |
| Com | Communication and integration capabilities |
| Full Term | Abbreviation |
|---|---|
| Area of Interest | AoI |
| Artificial Intelligence | AI |
| Augmented Reality | AR |
| Autoregressive Integrated Moving Average | ARIMA |
| Base Station | BS |
| Block Coordinate Descent | BCD |
| Convolutional Neural Network | CNN |
| Covariance Matrix Adaptation Evolution Strategy | CMA-ES |
| Cyber–Physical System | CPS |
| Deep Learning | DL |
| Deep Reinforcement Learning | DRL |
| Deep Q Learning | DQL |
| Degree of Freedom | DoF |
| Delegated Proof-of-Stake | DpoS |
| Density-Based Optics Clustering | DBOC |
| Device-to-Device | D2D |
| Digital Technology | DT |
| Disaster Management | DM |
| Drone Task Assignment | DTA |
| Extended Reality | XR |
| Generative Adversarial Network | GAN |
| High-Altitude Pseudosatellite | HAP |
| Humanitarian Digital Technology | HDT |
| Humanitarian Drone Capability | HDC |
| Humanitarian Drone Operation | HDO |
| Humanitarian Logistics | HL |
| Humanitarian Supply Chain | HSC |
| Internet of Things | IoT |
| Internet of Vehicles | IoV |
| Line of Sight | LoS |
| Long Range Wide Area Network | LoRaWAN |
| Machine Learning | ML |
| Micro Unmanned Aerial Vehicle | MUAV |
| Mixed Reality | MR |
| Mobile Edge Computing | MEC |
| Multioptimization Evolutionary Algorithm based on Decomposition | MOEA/D |
| Neural Network | NN |
| Panic Severity Index | PSI |
| Particle Swarm Optimization | PSO |
| Point of Interest | PoI |
| Quality of Experience | QoE |
| Quality of Service | QoS |
| Real-Time Kinematic Global Positioning System | RTK-GPS |
| Received Signal Strength Indication | RSSI |
| Reinforcement Learning | RL |
| Research Question | RQ |
| Robotics and Cyber–Physical System | RCPS |
| Search and Rescue | SAR |
| Seasonal Autoregression Integrated Moving Average | SARIMA |
| Signal-to-Interference-plus-Noise Ratio | SINR |
| Social-media-driven Drone Sensing | SDS |
| Supervised Learning | SL |
| Systematic Literature Review | SLR |
| Unmanned Aerial Vehicle | UAV |
| Unmanned Ground Vehicle | UGV |
| Unmanned Surface Vehicle | USV |
| Unmanned Underwater Vehicle | UUV |
| Unsupervised Learning | UL |
| Vehicle-to-Vehicle | V2V |
| Vehicular Crowdsourcing | VC |
| Virtual Reality | VR |
| Wireless Power Transfer | WPT |
| Wireless Sensor Network | WSN |
Appendix B
| Ref. | Disaster Phase | Disaster Type | HDC | HDT | HDO | Objective | Subject of Planning | Vehicle Cons. | Solv. App. | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| M | P | Res | Rec | N | HM | Tran | Mon | Com | SD | MD | ||||||
| [151] | X | X | X | X | X | X | IoT, AI, big data | Path planning | Minimization of energy consumption and maximization of the throughput of IoT devices. | X | LF, EC, CTC, S, SF, W | Opt, MH, Game | ||||
| [169] | X | X | X | IoT, big data | Path planning | Maximization of the number of covered points, prioritization of the points according to their visit precedence, balancing coverage and priority objectives. | X | LF, CTC, S | OM | |||||||
| [141] | X | X | X | X | X | X | X | X | IoT, big data | Resource allocation, search | Strong wireless connectivity, wide-coverage footprint, high-throughput transmission, low power consumption, and, thus, longer drone flight time. | X | EC, CTC, S, W | OM | ||
| [206] | X | X | X | X | X | AI, big data | Search | Autonomous landing on static and moving targets with no prior information from external infrastructure of the target locations. | X | EqM | Co | |||||
| [199] | X | X | X | X | X | Crowdsourcing, AI, big data | Area Coverage | Object detection and fine-grained classification in images acquired from drones. | X | - | OM | |||||
| [139] | X | X | X | Χ | Χ | Χ | ΙοΤ, big data | Search | Identification of the position of mobile devices and, thus, missing persons. | X | LF, CTC, SF | OM | ||||
| [157] | X | X | X | X | IoT, big data | Resource allocation | Maximization of the overall sum rate of the system by optimizing the positions of UAVs for a given IoT distribution, optimization of the transmitting power of IoT devices. | X | CTC | Opt, H | ||||||
| [222] | X | X | VR, big data | Area coverage | Reduction in the cognitive overload when controlling drones. | X | EqM | Co | ||||||||
| [181] | X | X | X | X | X | X | IoT, big data | Routing | Minimization of energy consumption, maximization of network lifespan. | X | EC, CTC, S | Opt, MH | ||||
| [167] | X | X | X | X | X | X | IoT, big data | Data gathering | Optimization of IoT devices’ density, optimization of the number of UAVs covering the forest area, such that a lower bound on wildfire detection probability is maximized. | X | LF, CTC, W | Opt, H | ||||
| [192] | X | X | X | X | X | IoT, VR, cloud computing | Search, task assignment | Minimizing delivery time, energy consumption, and total costs for all robots; reducing maximum costs for all robots; balancing workload between robots/lengths of the tour/mission time/number of targets allocated. | X | EC, CTC, S, HG, W | Opt, H, Game | |||||
| [158] | X | X | X | IoT, big data | Resource allocation | Maximization of the average data rate of drones through power allocation and placement of drones. | X | LF, CTC, | Opt, H, LR | |||||||
| [147] | X | X | X | IoT, AI, edge computing, big data | Scheduling, trajectory planning, resource allocation | Maximization of the lifetime of mobile devices by jointly optimizing drone trajectories, task associations, devices’ CPU frequencies, and wireless transmitting powers. | X | LF, EC, CTC, SF | Opt, H | |||||||
| [160] | X | X | X | IoT, AI, big data | Resource allocation | Resumption of ground communication service in the postdisaster rescue context with the goal of optimizing energy efficiency. | X | LF, CTC | Opt, H | |||||||
| [111] | X | X | X | X | X | IoT, AI, big data | Path planning, data gathering | Minimization of completion time. | X | LF, EC, CTC, SF | Opt, H | |||||
| [121] | X | X | X | IoT, AI, big data | Scheduling, path planning, data gathering | Minimization of drone energy consumption | X | LF, EC, CTC | Opt, MH | |||||||
| [149] | X | X | X | X | X | IoT, big data | Search | Maximization of the obtainable gain (in terms of meeting the demands of the applications and users in terms of performance and success rate), minimization of the consequent cost in terms of energy consumption. | X | EC, CTC, W | Opt, H, Game | |||||
| [131] | X | X | X | X | IoT, AI, big data | Trajectory planning, scheduling, resource allocation | Sequential optimization of the 3D position of the drone, beam pattern, charging time to maximize energy harvested. | X | LF, EC, CTC, SF | Opt, MH, BnB | ||||||
| [166] | X | X | X | IoT, AI, big data | Path planning, data gathering, resource allocation, recharging | Maximization of the total uplink throughput, maximization of the total achievable rate of IoT devices, maximization of the sum rate of all IoT devices. | X | LF, CTC, S, SF | Opt, MH | |||||||
| [145] | X | X | X | X | IoT, AI, RCPS, big data | Path planning, resource allocation | Maximization of network coverage and exploration path | X | LF, EC, CTC, HG | Opt, H | ||||||
| [172] | X | X | X | X | X | X | IoT, blockchain, big data | Data gathering | Reducing data redundancy, improving sparsity, and ensuring the security of data transmission. | X | LF, EC, CTC, W | OM | ||||
| [159] | X | X | X | IoT, big data | Resource allocation | Evaluation of the overall outage probability for different SINR threshold values, D2D transmit powers, distance of an IoT user from the IoT gateway, and the distance of a D2D user from a drone. | X | LF, CTC | OM | |||||||
| [218] | X | X | X | X | RCPS | Supply allocation | Ensuring minimal distances between agents and avoiding collisions. | X | LF, SF, HG | Opt, MH | ||||||
| [210] | X | X | X | X | X | RCPS, big data | Search, task assignment, data gathering | Maximization of the amount of information for a given set of responder-defined AoIs. | X | LF, EC, CTC, HG | Opt, H | |||||
| [200] | X | X | X | X | X | X | Crowdsourcing, AI, RCPS, big data | Routing, task assignment, data gathering | Maximization of the amount of collected data, geographical fairness, energy efficiency, minimization of data dropout. | X | EC, CTC, S. HG | Opt, H | ||||
| [220] | X | X | X | X | IoT, blockchain, big data | Recharging | Optimal energy trading between drones and charging stations. | X | EC, CTC | OM, Game | ||||||
| [137] | X | X | X | IoT, blockchain, big data | Resource allocation | Optimization of cost and time parameters. | X | LF, CTC | Opt, H, Game | |||||||
| [209] | X | X | X | X | X | IoT, AI, big data | Area coverage | Reduction in the number of images to be processed by the first responders. | X | EC, W | OM | |||||
| [213] | X | X | X | RCPS | Search | Prediction and control of a large-scale joint swarm of UGVs and UAVs performing a joint autonomous land–air operation | X | EqM, CTC, HG | Co | |||||||
| [221] | X | X | X | Blockchain | Search | Addition of an encryption function to a large number of data transmission models. | X | CTC | OM | |||||||
| [225] | X | X | X | X | Big data | Path planning | Optimization of the smoothness of path, landing accuracy at destination, distance minimization. | X | X | LF, SF | Opt, E, MH | |||||
| [173] | X | X | X | X | IoT, big data | Resource allocation | Maximization of throughput. | X | LF, EC, CTC | Opt, MH | ||||||
| [143] | X | X | X | IoT, edge computing, big data | Resource allocation | Maximization of the total successful computed data, optimization of the usage of aerial resources. | X | CTC | Opt, H, Game | |||||||
| [168] | X | X | X | X | X | X | X | IoT, big data | Data gathering | Enhancement of the lifespan of the WSN. | X | LF, EC, CTC, S | OM | |||
| [188] | X | X | X | IoT, edge computing | Task assignment | Minimization of energy consumption and task completion time for optimal task–UAV–mobile edge server. | X | LF, EC, CTC | Opt, H | |||||||
| [216] | X | X | X | RCPS | Area coverage | Position estimation for a tethered UAV, in charge of securing the safety of the teleoperator of a construction machine. | X | LF, HG | OM | |||||||
| [171] | X | X | X | X | X | IoT, big data | Data gathering, trajectory planning | Use of UAVs as IoT devices for data acquisition from different clusters of sensor devices deployed in a region through geofencing. | X | CTC, S, SF | OM | |||||
| [135] | X | X | X | X | IoT, AI, Edge Computing, big data | Trajectory Planning, Task Assignment | Maximization of the number of completed tasks and minimization of energy consumption. | X | LF, EC, CTC, SF | Opt, H | ||||||
| [154] | X | X | X | IoT, AI, Edge Computing, big data | Resource Allocation, Path Planning | Maximization of the average total QoE of all IoT devices over all time slots. | X | LF, CTC, SF | Opt, H | |||||||
| [162] | X | X | X | X | IoT, AI, big data | Resource Allocation | Maximization of the number of node-to-node connections while maintaining a strongly connected drone network. | X | LF, CTC, W | Opt, H | ||||||
| [124] | X | X | X | Χ | IoT, big data | Scheduling, Path Planning, Area Coverage | Maximization of non-redundant photos taken by the UAV. | X | LF, EC, SF | Opt, H | ||||||
| [126] | X | X | X | X | X | IoT, big data | Resource Allocation | Minimization of the hovering time of the UAV and the power consumption of the D2D network. | X | LF, CTC, S | Opt, H | |||||
| [176] | X | X | X | IoT, big data | Routing, Task Assignment | Minimization of task processing latency and realization of computing while transmitting. | X | LF, CTC | Co | |||||||
| [142] | X | X | X | IoT, Cloud and Edge Computing, big data | Scheduling, Task Assignment, Resource Allocation | Minimization of the maximum computation delay among IoT devices. | X | LF, CTC, SF | Opt, H | |||||||
| [214] | X | X | X | X | X | X | RCPS, big data | Search, Sampling, Trajectory Planning | Realization of a mock hazardous chemical spill investigation and sampling task within a large shipping container requiring access to increasingly constrained spaces. | X | SF, HG, W | Co | ||||
| [207] | X | X | X | IoT, AI | Path Planning | Optimization of the location of drone BSs by minimizing the collective wireless received signal strength. | X | LF, CTC, SF | Opt, H | |||||||
| [152] | X | X | X | IoT | Path Planning, Scheduling | Minimization of time consumption and energy consumption of UAVs. | X | LF, EC, CTC, W | Opt, MH | |||||||
| [217] | Χ | Χ | X | X | RCPS, big data | Path Planning, Supply Allocation | Maximization of volume of supplies and covered area. | X | LF, HG | Opt, E | ||||||
| [146] | X | X | X | X | IoT, AI, edge computing, big data | Scheduling | Maximization of number of tasks distributed to the UAVs and minimization of the average energy consumption. | X | EC, CTC | Opt, H. MH | ||||||
| [215] | X | X | X | X | RCPS, big data | Path planning, search, area coverage | Ground map generation and path distance minimization. | X | CTC, SF, HG | Opt, H, MH | ||||||
| [211] | X | X | RCPS, big data | Search | Autonomous take-off, tracking, and landing of a UAV on a moving landing platform, detection, and localization of the mobile target using a downward-looking camera and vision-based tracking of the mobile platform while in flight. | X | LF, EqM, S, HG | Co | ||||||||
| [122] | X | X | X | IoT | Resource allocation | Optimization of UAV network coverage. | X | LF, EC, CTC, SF, W | OM | |||||||
| [51] | X | X | Χ | Χ | RCPS | Path planning, task assignment, scheduling | A reliable and stable control system for aerial manipulation, successful self-localization and mapping in 3D space, fast planning and task allocation. | X | EC, CTC, SF, HG | Co | ||||||
| [208] | X | X | X | X | AI, big data | Path planning, search | Autonomous UAV Navigation to locate missing human. | X | EqM, SF | Co | ||||||
| [178] | X | X | X | IoT, AI, blockchain, edge computing, big data | Data gathering | Minimization of energy consumption from forking events. | X | CTC | Opt, H | |||||||
| [204] | X | X | X | X | X | AI, big data | Area coverage | Flooded zone segmentation from aerial images that contain both water and nonwater elements. | X | S | Opt, H | |||||
| [185] | X | X | X | X | X | IoT, AI, blockchain, RCPS, cloud and edge computing | Supply Allocation | Optimization of delivery times in last-mile UAV-truck networks, optimization of resource distribution to reduce the cases of surplus and deficiency of resources at affected target sites, and throughput maximization. | X | CTC, HG | Opt, H | |||||
| [202] | X | X | AI, big data | Area coverage | Positioning of damaged poles with the inputs of coordinates and necessary information extracted from UAV images. | LF, S | OM | |||||||||
| [150] | X | X | X | IoT, AI, big data | Data gathering | First responder allocation, victims’ coalition formation, UAV–first responder association. | X | LF, EC, CTC | OM | |||||||
| [196] | Χ | Χ | Χ | Χ | X | Social media, AI, big data | Task assignment, path planning | Minimization of the discrepancy between the estimated validity of the events and their ground truth. | X | LF, EC, SF, W | OM, Game | |||||
| [197] | X | X | X | X | X | Social media, big data | Task assignment, path planning | Minimization of the discrepancy between the estimated validity of events and their ground truth. | X | LF, EC, SF | OM, Game | |||||
| [194] | X | X | X | X | X | Social media, AI, big data | Task assignment, path planning | Minimization of the discrepancy between the estimated truth of events and their ground truth and minimization of drone average power consumption at each sensing cycle. | X | LF, EqM, EC, SF | Opt, H, Game | |||||
| [195] | X | X | X | X | Social media, big data | Task assignment, path planning | Minimization of the discrepancy between the estimated validity of events and their ground truth. | X | S, W | Opt, H, Game | ||||||
| [224] | X | X | X | AR, big data | Area coverage | Improvement in the geographic registration (georegistration) accuracy. | X | S, W | Co | |||||||
| [190] | X | X | X | IoT, AI, edge computing | Task assignment | Minimization of completion time for all tasks in the system. | X | CTC, S | Opt, H | |||||||
| [179] | X | X | X | X | IoT | Scheduling | Optimization of drone scheduling time. | X | EC, CTC, W | Opt, E | ||||||
| [133] | X | X | X | X | X | X | X | IoT, AI, edge computing, big data | Search, task assignment | Minimization of average completion time of a set of tasks. | X | CTC, S | Co | |||
| [120] | X | X | X | X | X | X | X | IoT, AI, cloud and fog computing, big data | Data gathering | Panic-based on-time and orderly evacuation of stranded persons. | X | EC, CTC, SF, W | OM | |||
| [134] | X | X | X | X | X | IoT, big data | Area coverage | Improvement in UAV coverage area. | X | LF, EC, CTC, S | OM | |||||
| [138] | X | X | X | X | IoT, AI, edge computing, big data | Task assignment, resource allocation | Minimization of the overall network computation cost in terms of energy and delay. | X | EC, CTC | Opt, H, Game | ||||||
| [182] | X | X | X | IoT, AI, big data | Trajectory planning, data gathering | Minimization of the age of network information. | X | CTC | OM | |||||||
| [155] | X | X | X | X | X | X | X | IoT, cloud computing, big data | Search, trajectory planning | Crowd counting and localization. | X | SF | Opt, MH | |||
| [144] | X | X | X | IoT, edge computing, big data | Resource allocation | Delay minimization. | X | CTC | Opt, H | |||||||
| [164] | X | Χ | Χ | ΙοΤ, edge computing, big data | Task assignment | Service delay minimization. | X | EqM, CTC | OM | |||||||
| [130] | X | X | X | X | X | IoT, AI, big data | Trajectory planning, resource allocation | Maximization of the coalition head energy availability to find UAV’s optimal position. | X | LF, CTC, SF | Opt, H, Game | |||||
| [180] | X | X | X | IoT, AI | Routing | Proactive vehicular routing using mobility control information. | X | LF, CTC | OM | |||||||
| [177] | X | X | X | X | X | IoT, AI, big data, blockchain, RCPS | Scheduling, trajectory planning, task assignment | Autonomous path-finding of miniature UAVs assisted by task-offloading devices. | X | CTC, S | Co | |||||
| [148] | X | X | X | X | X | IoT, AI, big data | Search, path planning | Minimization of the signal propagation exponent and the reference RSSI value. | X | S, SF | OM | |||||
| [198] | X | X | X | X | X | Social media, big data | Search, task assignment | Minimization of the total fly time cost. | X | LF, EC | Opt, H | |||||
| [140] | X | X | X | X | IoT, big data | Resource allocation, trajectory planning | Maximization of the total number of served IoT devices and collected throughput. | X | LF, CTC, SF | Opt, H | ||||||
| [132] | X | X | X | X | X | X | IoT, big data | Data gathering | Maximization of the number of connected mobile ground nodes. | X | CTC, S, SF, HG | Opt, MH | ||||
| [170] | X | X | X | IoT, AI, big data | Path planning, data gathering | Minimization of completion time and total energy consumption of UAVs’ deployment procedure in data collection missions. | X | CTC, S, SF | Opt, H | |||||||
| [191] | X | X | X | X | X | X | X | IoT, edge and cloud computing, big data | Task assignment | Creation of a management layer between the IoT application and operating system to establish and monitor network connectivity, estimate failures, and adapt task planning. | X | CTC | Co | |||
| [205] | X | X | X | X | X | IoT, AI, big data | Resource allocation | Creation of a transmission control protocol for the 5G millimeter-wave network. | X | LF, CTC, S | OM | |||||
| [223] | X | X | X | X | VR, big data | Path planning | Path optimization. | Χ | LF, EqM, SF, W | Opt, MH | ||||||
| [165] | X | X | X | IoT, big data | Resource allocation | Optimization of the placement of a group of drone-cells with limited backhaul communication ranges to maximize the number of served users. | X | CTC | Opt, E, MH | |||||||
| [128] | X | X | X | X | IoT, big data | Resource allocation | Minimization of the transmission power for relaying data at the UAV mounted BSs to extend hovering time and, thus, maximize the number of human-portable machine-type devices to establish connectivity and send rescue messages with required data rates. | X | LF, EC, CTC | Opt, H | ||||||
| [127] | X | Χ | Χ | Χ | Χ | Χ | ΙοΤ, big data | Routing, resource allocation | Minimization of the number of hops in the uplink and downlink transmission between the UAV and mobile devices. | X | LF, EC, CTC, S | Opt, H | ||||
| [163] | X | X | X | X | IoT, AI, big data | Data gathering | Creation of a task distribution mechanism to achieve trade-off between data aggregation ratio and energy cost. | X | EC, CTC | Opt, H | ||||||
| [212] | X | X | X | RCPS, big data | Search | Construction of an autonomous landing platform and design of cooperative target considering the rapidity and stability of landing, creation of a method that can detect and track moving targets in real time. | X | HG, W | Co | |||||||
| [219] | X | X | X | X | X | IoT, blockchain, RCPS, big data | Search, data gathering | Maximization of the utility of electric vehicles. | X | LF, EC, CTC, S, HG | Opt, H, Game | |||||
| [153] | X | X | X | X | X | IoT, blockchain, RCPS, big data | Search, data gathering | Ensure secure blockchain offline transactions among electric vehicles. | X | EC, CTC, HG | Opt, E, Game | |||||
| [203] | X | X | X | X | AI, big data | Scheduling, path planning | Autonomous path-finding of miniature UAVs assisted by task-offloading devices. | X | CTC, S, SF | Co | ||||||
| [189] | X | X | X | X | X | IoT, big data, edge computing | Task assignment | Minimization of service time and energy consumption. | X | EqM, EC, CTC | Opt, H | |||||
| [193] | X | X | X | X | AI, blockchain, RCPS, fog computing, big data | Search, task assignment | Ensure secure, energy-efficient data sharing for UAV-aided disaster relief networks. | X | LF, EC, CTC, HG, W | OM | ||||||
| [94] | X | X | X | IoT, big data | Scheduling, trajectory-planning | Optimization of mission completion time and energy consumption with the goal of serving IoT nodes as much as possible based on their data needs. | X | LF, EC, CTC, SF | Opt, H, DP | |||||||
| [156] | X | X | X | IoT, edge computing, big data | Task assignment, trajectory planning | Minimization of the energy consumption of IoT devices. | X | LF, EC, SF | Opt, H | |||||||
| [136] | X | X | X | IoT, Big data | Trajectory planning, resource allocation | Maximization of the downlink achievable sum rate of users. | X | LF, CTC, SF | Opt, H | |||||||
| [129] | X | X | X | X | IoT, big data | Trajectory planning, resource allocation | Maximization of the uplink average achievable sum rate of IoT terminals. | X | LF, CTC, SF | Opt, H, LR | ||||||
| [161] | X | X | X | X | IoT, cloud and edge computing, big data | Resource allocation | Minimization of the total energy consumed by the system for computation and transmission. | X | CTC, SF | Opt, H | ||||||
| [201] | X | X | X | X | X | X | AI, big data | Area coverage | Intelligent identification of UAV aerial images, extraction of foreground features of disasters, and timely detection of abnormal hidden hazards. | SF, W | OM | |||||
References
- Tomasini, R.M. The Evolutions of Humanitarian-Private Partnerships: Collaborative Frameworks Under Review. In The Palgrave Handbook of Humanitarian Logistics and Supply Chain Management; Kovács, G., Spens, K., Moshtari, M., Eds.; Palgrave Macmillan UK: London, UK, 2018; pp. 627–635. ISBN 978-1-137-59098-5. [Google Scholar]
- Van Wassenhove, L.N. Humanitarian Aid Logistics: Supply Chain Management in High Gear. J. Oper. Res. Soc. 2006, 57, 475–489. [Google Scholar] [CrossRef]
- Holguín-Veras, J.; Jaller, M.; Van Wassenhove, L.N.; Pérez, N.; Wachtendorf, T. On the Unique Features of Post-Disaster Humanitarian Logistics. J. Oper. Manag. 2012, 30, 494–506. [Google Scholar] [CrossRef]
- Liberatore, F.; Pizarro, C.; de Blas, C.S.; Ortuño, M.T.; Vitoriano, B. Uncertainty in Humanitarian Logistics for Disaster Management. A Review. In Decision Aid Models for Disaster Management and Emergencies; Vitoriano, B., Montero, J., Ruan, D., Eds.; Atlantis Computational Intelligence Systems; Atlantis Press: Paris, France, 2013; Volume 7, pp. 45–74. ISBN 978-94-91216-73-2. [Google Scholar]
- Rejeb, A.; Rejeb, K.; Simske, S.; Treiblmaier, H. Humanitarian Drones: A Review and Research Agenda. Internet Things 2021, 16, 100434. [Google Scholar] [CrossRef]
- Akter, S.; Wamba, S.F. Big Data and Disaster Management: A Systematic Review and Agenda for Future Research. Ann. Oper. Res. 2019, 283, 939–959. [Google Scholar] [CrossRef]
- Gupta, S.; Altay, N.; Luo, Z. Big Data in Humanitarian Supply Chain Management: A Review and Further Research Directions. Ann. Oper. Res. 2019, 283, 1153–1173. [Google Scholar] [CrossRef]
- Joseph, J.K.; Dev, K.A.; Pradeepkumar, A.P.; Mohan, M. Chapter 16—Big Data Analytics and Social Media in Disaster Management. In Integrating Disaster Science and Management; Samui, P., Kim, D., Ghosh, C., Eds.; Elsevier: Amsterdam, The Netherlands, 2018; pp. 287–294. ISBN 978-0-12-812056-9. [Google Scholar]
- Arslan, M.; Roxin, A.-M.; Cruz, C.; Ginhac, D. A Review on Applications of Big Data for Disaster Management. In Proceedings of the 2017 13th International Conference on Signal-Image Technology & Internet-Based Systems (SITIS), Jaipur, India, 4–7 December 2017; pp. 370–375. [Google Scholar]
- Wang, J.; Wu, Y.; Yen, N.; Guo, S.; Cheng, Z. Big Data Analytics for Emergency Communication Networks: A Survey. IEEE Commun. Surv. Tutor. 2016, 18, 1758–1778. [Google Scholar] [CrossRef]
- Yu, M.; Yang, C.; Li, Y. Big Data in Natural Disaster Management: A Review. Geosciences 2018, 8, 165. [Google Scholar] [CrossRef]
- de França Bail, R.; Kovaleski, J.L.; da Silva, V.L.; Pagani, R.N.; de Genaro Chiroli, D.M. Internet of Things in Disaster Management: Technologies and Uses. Environ. Hazards 2021, 20, 493–513. [Google Scholar] [CrossRef]
- Ray, P.P.; Mukherjee, M.; Shu, L. Internet of Things for Disaster Management: State-of-the-Art and Prospects. IEEE Access 2017, 5, 18818–18835. [Google Scholar] [CrossRef]
- Sinha, A.; Kumar, P.; Rana, N.P.; Islam, R.; Dwivedi, Y.K. Impact of Internet of Things (IoT) in Disaster Management: A Task-Technology Fit Perspective. Ann. Oper. Res. 2019, 283, 759–794. [Google Scholar] [CrossRef]
- Aljumah, A.; Kaur, A.; Bhatia, M.; Ahamed Ahanger, T. Internet of Things-Fog Computing-Based Framework for Smart Disaster Management. Trans. Emerg. Telecommun. Technol. 2021, 32, e4078. [Google Scholar] [CrossRef]
- Tsubaki, T.; Ishibashi, R.; Kuwahara, T.; Okazaki, Y. Effective Disaster Recovery for Edge Computing against Large-Scale Natural Disasters. In Proceedings of the 2020 IEEE 17th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2020; pp. 1–2. [Google Scholar]
- Jian-hua, Z.; Nan, Z. Cloud Computing-Based Data Storage and Disaster Recovery. In Proceedings of the 2011 International Conference on Future Computer Science and Education, Xi’an, China, 20–21 August 2011; pp. 629–632. [Google Scholar]
- Rodríguez-Espíndola, O.; Chowdhury, S.; Beltagui, A.; Albores, P. The Potential of Emergent Disruptive Technologies for Humanitarian Supply Chains: The Integration of Blockchain, Artificial Intelligence and 3D Printing. Int. J. Prod. Res. 2020, 58, 4610–4630. [Google Scholar] [CrossRef]
- Chamola, V.; Hassija, V.; Gupta, S.; Goyal, A.; Guizani, M.; Sikdar, B. Disaster and Pandemic Management Using Machine Learning: A Survey. IEEE Internet Things J. 2021, 8, 16047–16071. [Google Scholar] [CrossRef] [PubMed]
- Linardos, V.; Drakaki, M.; Tzionas, P.; Karnavas, Y.L. Machine Learning in Disaster Management: Recent Developments in Methods and Applications. Mach. Learn. Knowl. Extr. 2022, 4, 446–473. [Google Scholar] [CrossRef]
- Dailey, D.; Starbird, K. Social Media Seamsters: Stitching Platforms & Audiences into Local Crisis Infrastructure. In Proceedings of the 2017 ACM Conference on Computer Supported Cooperative Work and Social Computing, Portland, OR, USA, 25 February–1 March 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 1277–1289. [Google Scholar]
- Houston, J.B.; Hawthorne, J.; Perreault, M.F.; Park, E.H.; Goldstein Hode, M.; Halliwell, M.R.; Turner McGowen, S.E.; Davis, R.; Vaid, S.; McElderry, J.A.; et al. Social Media and Disasters: A Functional Framework for Social Media Use in Disaster Planning, Response, and Research. Disasters 2015, 39, 1–22. [Google Scholar] [CrossRef]
- Landwehr, P.M.; Carley, K.M. Social Media in Disaster Relief. In Data Mining and Knowledge Discovery for Big Data: Methodologies, Challenge and Opportunities; Chu, W.W., Ed.; Studies in Big Data; Springer: Berlin/Heidelberg Germany, 2014; pp. 225–257. ISBN 978-3-642-40837-3. [Google Scholar]
- Alexander, D.E. Social Media in Disaster Risk Reduction and Crisis Management. Sci. Eng. Ethics 2014, 20, 717–733. [Google Scholar] [CrossRef]
- Murphy, R.R.; Tadokoro, S.; Kleiner, A. Disaster Robotics. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer Handbooks; Springer: Cham, Switzerland, 2016; pp. 1577–1604. ISBN 978-3-319-32552-1. [Google Scholar]
- Jara-Olmedo, A.; Medina-Pazmiño, W.; Tozer, T.; Aguilar, W.G.; Pardo, J.A. E-Services from Emergency Communication Network: Aerial Platform Evaluation. In Proceedings of the 2018 International Conference on eDemocracy & eGovernment (ICEDEG), Ambato, Ecuador, 4–6 April 2018; pp. 251–256. [Google Scholar]
- Scerri, P.; Kannan, B.; Velagapudi, P.; Macarthur, K.; Stone, P.; Taylor, M.; Dolan, J.; Farinelli, A.; Chapman, A.; Dias, B.; et al. Flood Disaster Mitigation: A Real-World Challenge Problem for Multi-Agent Unmanned Surface Vehicles. In Advanced Agent Technology; Dechesne, F., Hattori, H., ter Mors, A., Such, J.M., Weyns, D., Dignum, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 252–269. [Google Scholar]
- Hunt, K.; Narayanan, A.; Zhuang, J. Blockchain in Humanitarian Operations Management: A Review of Research and Practice. Socio-Econ. Plan. Sci. 2022, 80, 101175. [Google Scholar] [CrossRef]
- Hunt, K.; Zhuang, J. Blockchain for Disaster Management. In Big Data and Blockchain for Service Operations Management; Emrouznejad, A., Charles, V., Eds.; Studies in Big Data; Springer: Cham, Switzerland, 2022; pp. 253–269. ISBN 978-3-030-87304-2. [Google Scholar]
- Zwitter, A.; Boisse-Despiaux, M. Blockchain for Humanitarian Action and Development Aid. Int. J. Humanit. Action 2018, 3, 16. [Google Scholar] [CrossRef]
- Nunes, I.L.; Lucas, R.; Simões-Marques, M.; Correia, N. Augmented Reality in Support of Disaster Response. In Proceedings of the Advances in Human Factors and Systems Interaction, Los Angeles, CA, USA, 17−21 July 2017; Nunes, I.L., Ed.; Springer: Cham, Switzerland, 2018; pp. 155–167. [Google Scholar]
- Khanal, S.; Medasetti, U.S.; Mashal, M.; Savage, B.; Khadka, R. Virtual and Augmented Reality in the Disaster Management Technology: A Literature Review of the Past 11 Years. Front. Virtual Real. 2022, 3, 30. [Google Scholar] [CrossRef]
- Heaslip, G.; Kovács, G.; Grant, D.B. Servitization as a Competitive Difference in Humanitarian Logistics. JHLSCM 2018, 8, 497–517. [Google Scholar] [CrossRef]
- Ghadge, A.; Dani, S.; Kalawsky, R. Supply Chain Risk Management: Present and Future Scope. Int. J. Logist. Manag. 2012, 23, 313–339. [Google Scholar] [CrossRef]
- Tranfield, D.; Denyer, D.; Smart, P. Towards a Methodology for Developing Evidence-Informed Management Knowledge by Means of Systematic Review. Br. J. Manag. 2003, 14, 207–222. [Google Scholar] [CrossRef]
- Behl, A.; Dutta, P. Humanitarian Supply Chain Management: A Thematic Literature Review and Future Directions of Research. Ann. Oper. Res. 2019, 283, 1001–1044. [Google Scholar] [CrossRef]
- Marić, J.; Galera-Zarco, C.; Opazo-Basáez, M. The Emergent Role of Digital Technologies in the Context of Humanitarian Supply Chains: A Systematic Literature Review. Ann. Oper. Res. 2021, 319, 1003–1044. [Google Scholar] [CrossRef]
- Modgil, S.; Singh, R.K.; Foropon, C. Quality Management in Humanitarian Operations and Disaster Relief Management: A Review and Future Research Directions. Ann. Oper. Res. 2020, 319, 1045–1098. [Google Scholar] [CrossRef] [PubMed]
- Pyakurel, U.; Dhamala, T.N. Continuous Dynamic Contraflow Approach for Evacuation Planning. Ann. Oper. Res. 2017, 253, 573–598. [Google Scholar] [CrossRef]
- Sandvik, K.B.; Jumbert, M.G.; Karlsrud, J.; Kaufmann, M. Humanitarian Technology: A Critical Research Agenda. Int. Rev. Red Cross 2014, 96, 219–242. [Google Scholar] [CrossRef]
- Munawar, H.S.; Mojtahedi, M.; Hammad, A.W.A.; Kouzani, A.; Mahmud, M.A.P. Disruptive Technologies as a Solution for Disaster Risk Management: A Review. Sci. Total Environ. 2022, 806, 151351. [Google Scholar] [CrossRef]
- Khan, A.; Gupta, S.; Gupta, S.K. Emerging UAV Technology for Disaster Detection, Mitigation, Response, and Preparedness. J. Field Robot. 2022, 39, 905–955. [Google Scholar] [CrossRef]
- Chung, S.H.; Sah, B.; Lee, J. Optimization for Drone and Drone-Truck Combined Operations: A Review of the State of the Art and Future Directions. Comput. Oper. Res. 2020, 123, 105004. [Google Scholar] [CrossRef]
- Habib, M.S.; Lee, Y.H.; Memon, M.S. Mathematical Models in Humanitarian Supply Chain Management: A Systematic Literature Review. Math. Probl. Eng. 2016, 2016, 1–20. [Google Scholar] [CrossRef]
- Hezam, I.M.; Nayeem, M.K. A Systematic Literature Review on Mathematical Models of Humanitarian Logistics. Symmetry 2020, 13, 11. [Google Scholar] [CrossRef]
- Özdamar, L.; Ertem, M.A. Models, Solutions and Enabling Technologies in Humanitarian Logistics. Eur. J. Oper. Res. 2015, 244, 55–65. [Google Scholar] [CrossRef]
- Anaya-Arenas, A.M.; Renaud, J.; Ruiz, A. Relief Distribution Networks: A Systematic Review. Ann. Oper. Res. 2014, 223, 53–79. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization Approaches for Civil Applications of Unmanned Aerial Vehicles (UAVs) or Aerial Drones: A Survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Coutinho, W.P.; Battarra, M.; Fliege, J. The Unmanned Aerial Vehicle Routing and Trajectory Optimisation Problem, a Taxonomic Review. Comput. Ind. Eng. 2018, 120, 116–128. [Google Scholar] [CrossRef]
- Rojas Viloria, D.; Solano-Charris, E.L.; Muñoz-Villamizar, A.; Montoya-Torres, J.R. Unmanned Aerial Vehicles/Drones in Vehicle Routing Problems: A Literature Review. Int. Trans. Oper. Res. 2021, 28, 1626–1657. [Google Scholar] [CrossRef]
- Petrovic, T.; Haus, T.; Arbanas, B.; Orsag, M.; Bogdan, S. Can UAV and UGV Be Best Buddies? Towards Heterogeneous Aerial-Ground Cooperative Robot System for Complex Aerial Manipulation Tasks. In Proceedings of the 2015 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Colmar, France, 21–23 July 2015; Volume 01, pp. 238–245. [Google Scholar]
- Shan, J.; Ballard, D.; Vinson, D.R. Publication Non Grata: The Challenge of Publishing Non-COVID-19 Research in the COVID Era. Cureus 2020, 12, e11403. [Google Scholar] [CrossRef]
- Dubey, R.; Gunasekaran, A.; Childe, S.J.; Roubaud, D.; Fosso Wamba, S.; Giannakis, M.; Foropon, C. Big Data Analytics and Organizational Culture as Complements to Swift Trust and Collaborative Performance in the Humanitarian Supply Chain. Int. J. Prod. Econ. 2019, 210, 120–136. [Google Scholar] [CrossRef]
- Krippendorff, K. Content Analysis: An Introduction to Its Methodology; SAGE Publications: Thousand Oaks, CA, USA, 2018; ISBN 978-1-5063-9567-8. [Google Scholar]
- Polit, D.F.; Beck, C.T. Nursing Research: Principles and Methods; Lippincott Williams & Wilkins: Philadelphia, PA, USA, 2004; ISBN 978-0-7817-3733-3. [Google Scholar]
- Mayring, P. A Companion to Qualitative Research; SAGE: London, UK, 2004; ISBN 978-0-7619-7374-4. [Google Scholar]
- Saunders, M.; Lewis, P.; Thornhill, A. Research Methods for Business Students; Pearson Education: London, UK, 2009; ISBN 978-0-273-71686-0. [Google Scholar]
- Altay, N.; Green, W.G. OR/MS Research in Disaster Operations Management. Eur. J. Oper. Res. 2006, 175, 475–493. [Google Scholar] [CrossRef]
- Lee, I.; Lee, K. The Internet of Things (IoT): Applications, Investments, and Challenges for Enterprises. Bus. Horiz. 2015, 58, 431–440. [Google Scholar] [CrossRef]
- Adeel, A.; Gogate, M.; Farooq, S.; Ieracitano, C.; Dashtipour, K.; Larijani, H.; Hussain, A. A Survey on the Role of Wireless Sensor Networks and IoT in Disaster Management. In Geological Disaster Monitoring Based on Sensor Networks; Durrani, T.S., Wang, W., Forbes, S.M., Eds.; Springer Natural Hazards; Springer: Singapore, 2019; pp. 57–66. ISBN 9789811309922. [Google Scholar]
- Velev, D.; Zlateva, P.; Zong, X. Challenges of 5G Usability in Disaster Management. In Proceedings of the 2018 International Conference on Computing and Artificial Intelligence, Chengdu, China, 12–14 March 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 71–75. [Google Scholar]
- Amiri, I.S.; Prakash, J.; Balasaraswathi, M.; Sivasankaran, V.; Sundararajan, T.V.P.; Hindia, M.H.D.N.; Tilwari, V.; Dimyati, K.; Henry, O. DABPR: A Large-Scale Internet of Things-Based Data Aggregation Back Pressure Routing for Disaster Management. Wirel. Netw. 2020, 26, 2353–2374. [Google Scholar] [CrossRef]
- Qian, L.; Luo, Z.; Du, Y.; Guo, L. Cloud Computing: An Overview. In Proceedings of the Cloud Computing, Beijing, China, 1–4 December 2009; Jaatun, M.G., Zhao, G., Rong, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 626–631. [Google Scholar]
- Chiang, M.; Zhang, T. Fog and IoT: An Overview of Research Opportunities. IEEE Internet Things J. 2016, 3, 854–864. [Google Scholar] [CrossRef]
- Surowiecki, J. The Wisdom of Crowds; Knopf Doubleday Publishing Group: New York, NY, USA, 2005; ISBN 978-0-307-27505-9. [Google Scholar]
- Soden, R.; Palen, L. Infrastructure in the Wild: What Mapping in Post-Earthquake Nepal Reveals about Infrastructural Emergence. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; Association for Computing Machinery: New York, NY, USA, 2016; pp. 2796–2807. [Google Scholar]
- Kogan, M.; Palen, L.; Anderson, K.M. Think Local, Retweet Global: Retweeting by the Geographically-Vulnerable during Hurricane Sandy. In Proceedings of the 18th ACM Conference on Computer Supported Cooperative Work & Social Computing, Vancouver, BC, Canada, 14–18 March 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 981–993. [Google Scholar]
- Palen, L.; Liu, S.B. Citizen Communications in Crisis: Anticipating a Future of ICT-Supported Public Participation. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 28 April–3 May 2007; Association for Computing Machinery: New York, NY, USA, 2007; pp. 727–736. [Google Scholar]
- Qu, Y.; Huang, C.; Zhang, P.; Zhang, J. Microblogging after a Major Disaster in China: A Case Study of the 2010 Yushu Earthquake. In Proceedings of the ACM 2011 Conference on Computer Supported Cooperative Work, Hangzhou, China, 19–23 March 2011; Association for Computing Machinery: New York, NY, USA, 2011; pp. 25–34. [Google Scholar]
- Vieweg, S.; Hughes, A.L.; Starbird, K.; Palen, L. Microblogging during Two Natural Hazards Events: What Twitter May Contribute to Situational Awareness. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Atlanta, GA, USA, 10–15 April 2010; Association for Computing Machinery: New York, NY, USA, 2010; pp. 1079–1088. [Google Scholar]
- Starbird, K.; Palen, L. “Voluntweeters”: Self-Organizing by Digital Volunteers in Times of Crisis. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011; Association for Computing Machinery: New York, NY, USA, 2011; pp. 1071–1080. [Google Scholar]
- Torrey, C.; Burke, M.; Lee, M.; Dey, A.; Fussell, S.; Kiesler, S. Connected Giving: Ordinary People Coordinating Disaster Relief on the Internet. In Proceedings of the 2007 40th Annual Hawaii International Conference on System Sciences (HICSS’07), Waikoloa, HI, USA; 2007; p. 179a. [Google Scholar]
- Jaeger, P.T.; Shneiderman, B.; Fleischmann, K.R.; Preece, J.; Qu, Y.; Fei Wu, P. Community Response Grids: E-Government, Social Networks, and Effective Emergency Management. Telecommun. Policy 2007, 31, 592–604. [Google Scholar] [CrossRef]
- Wang, Z.; Song, H.; Watkins, D.W.; Ong, K.G.; Xue, P.; Yang, Q.; Shi, X. Cyber-Physical Systems for Water Sustainability: Challenges and Opportunities. IEEE Commun. Mag. 2015, 53, 216–222. [Google Scholar] [CrossRef]
- Gunes, V.; Peter, S.; Givargis, T.; Vahid, F. A Survey on Concepts, Applications, and Challenges in Cyber-Physical Systems. KSII Trans. Internet Inf. Syst. 2014, 8, 4242–4268. [Google Scholar] [CrossRef]
- Gelenbe, E.; Wu, F.-J. Future Research on Cyber-Physical Emergency Management Systems. Future Internet 2013, 5, 336–354. [Google Scholar] [CrossRef]
- Liang, X.; Shetty, S.; Tosh, D.; Kamhoua, C.; Kwiat, K.; Njilla, L. ProvChain: A Blockchain-Based Data Provenance Architecture in Cloud Environment with Enhanced Privacy and Availability. In Proceedings of the 2017 17th IEEE/ACM International Symposium on Cluster, Cloud and Grid Computing (CCGRID), Madrid, Spain, 14–17 May 2017; pp. 468–477. [Google Scholar]
- Anderson, A.; Boppana, A.; Wall, R.; Acemyan, C.Z.; Adolf, J.; Klaus, D. Framework for Developing Alternative Reality Environments to Engineer Large, Complex Systems. Virtual Real. 2021, 25, 147–163. [Google Scholar] [CrossRef]
- Escribano Macias, J.; Angeloudis, P.; Ochieng, W. Optimal Hub Selection for Rapid Medical Deliveries Using Unmanned Aerial Vehicles. Transp. Res. Part C Emerg. Technol. 2020, 110, 56–80. [Google Scholar] [CrossRef]
- Nedjati, A.; Izbirak, G.; Vizvari, B.; Arkat, J. Complete Coverage Path Planning for a Multi-UAV Response System in Post-Earthquake Assessment. Robotics 2016, 5, 26. [Google Scholar] [CrossRef]
- Rabta, B.; Wankmüller, C.; Reiner, G. A Drone Fleet Model for Last-Mile Distribution in Disaster Relief Operations. Int. J. Disaster Risk Reduct. 2018, 28, 107–112. [Google Scholar] [CrossRef]
- Gärtner, A.C.; Ferriero, D.; Bayrak, A.E.; Papalambros, P.Y. Integrated System Design of a Modular, Autonomous, Aerial and Ground Vehicle Fleet for Disaster Relief Missions—A Case Study. In Proceedings of the DS 92: DESIGN 2018 15th International Design Conference, Dubrovnik, Croatia, 21–24 May 2018; pp. 735–746. Available online: https://www.designsociety.org/publication/40488/INTEGRATED+SYSTEM+DESIGN+OF+A+MODULAR%2C+AUTONOMOUS%2C+AERIAL+AND+GROUND+VEHICLE+FLEET+FOR+DISASTER+RELIEF+MISSIONS+-+A+CASE+STUDY (accessed on 12 April 2023).
- Lei, T.; Zhang, Y.; Wang, X.; Fu, J.; Li, L.; Pang, Z.; Zhang, X.; Kan, G. The Application of Unmanned Aerial Vehicle Remote Sensing for Monitoring Secondary Geological Disasters after Earthquakes. In Proceedings of the Ninth International Conference on Digital Image Processing (ICDIP 2017), Hong Kong, China, 19–22 May 2017; SPIE: Bellingham, WA, USA, 2017; Volume 10420, pp. 736–742. [Google Scholar]
- Oruc, B.E.; Kara, B.Y. Post-Disaster Assessment Routing Problem. Transp. Res. Part B Methodol. 2018, 116, 76–102. [Google Scholar] [CrossRef]
- Kim, D.; Lee, K.; Moon, I. Stochastic Facility Location Model for Drones Considering Uncertain Flight Distance. Ann. Oper. Res. 2019, 283, 1283–1302. [Google Scholar] [CrossRef]
- Reynaud, L.; Guérin-Lassous, I. Physics-Based Swarm Intelligence for Disaster Relief Communications. In Proceedings of the Ad-hoc, Mobile, and Wireless Networks, Lille, France, 4–6 July 2016; Mitton, N., Loscri, V., Mouradian, A., Eds.; Springer: Cham, Switzerland, 2016; pp. 93–107. [Google Scholar]
- Dille, M.; Singh, S. Efficient Aerial Coverage Search in Road Networks. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; American Institute of Aeronautics and Astronautics: Boston, MA, USA, 2013. [Google Scholar]
- Oh, H.; Kim, S.; Tsourdos, A.; White, B.A. Coordinated Road-Network Search Route Planning by a Team of UAVs. Int. J. Syst. Sci. 2014, 45, 825–840. [Google Scholar] [CrossRef]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage Path Planning with Unmanned Aerial Vehicles for 3D Terrain Reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]
- Avellar, G.S.C.; Pereira, G.A.S.; Pimenta, L.C.A.; Iscold, P. Multi-UAV Routing for Area Coverage and Remote Sensing with Minimum Time. Sensors 2015, 15, 27783–27803. [Google Scholar] [CrossRef]
- Sujit, P.B.; Saripalli, S.; Sousa, J.B. Unmanned Aerial Vehicle Path Following: A Survey and Analysis of Algorithms for Fixed-Wing Unmanned Aerial Vehicless. IEEE Control Syst. Mag. 2014, 34, 42–59. [Google Scholar] [CrossRef]
- Lanillos, P.; Gan, S.K.; Besada-Portas, E.; Pajares, G.; Sukkarieh, S. Multi-UAV Target Search Using Decentralized Gradient-Based Negotiation with Expected Observation. Inf. Sci. 2014, 282, 92–110. [Google Scholar] [CrossRef]
- Ji, X.; Wang, X.; Niu, Y.; Shen, L. Cooperative Search by Multiple Unmanned Aerial Vehicles in a Nonconvex Environment. Math. Probl. Eng. 2015, 2015, e196730. [Google Scholar] [CrossRef]
- Yang, H.; Ruby, R.; Pham, Q.-V.; Wu, K. Aiding a Disaster Spot via Multi-UAV-Based IoT Networks: Energy and Mission Completion Time-Aware Trajectory Optimization. IEEE Internet Things J. 2022, 9, 5853–5867. [Google Scholar] [CrossRef]
- Murray, C.C.; Chu, A.G. The Flying Sidekick Traveling Salesman Problem: Optimization of Drone-Assisted Parcel Delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Mechali, O.; Xu, L.; Wei, M. UAV Path Planning: Technical Report; University of Electronic Science and Technology of China: Chengdu, China, 2018. [Google Scholar]
- Gasparetto, A.; Boscariol, P.; Lanzutti, A.; Vidoni, R. Path Planning and Trajectory Planning Algorithms: A General Overview. In Motion and Operation Planning of Robotic Systems: Background and Practical Approaches; Carbone, G., Gomez-Bravo, F., Eds.; Mechanisms and Machine Science; Springer: Cham, Switzerland, 2015; pp. 3–27. ISBN 978-3-319-14705-5. [Google Scholar]
- Khamis, A.; Hussein, A.; Elmogy, A. Multi-Robot Task Allocation: A Review of the State-of-the-Art. In Cooperative Robots and Sensor Networks 2015; Koubâa, A., Martínez-de Dios, J.R., Eds.; Studies in Computational Intelligence; Springer: Cham, Switzerland, 2015; pp. 31–51. ISBN 978-3-319-18299-5. [Google Scholar]
- Miao, Y.; Zhong, L.; Yin, Y.; Zou, C.; Luo, Z. Research on Dynamic Task Allocation for Multiple Unmanned Aerial Vehicles. Trans. Inst. Meas. Control 2017, 39, 466–474. [Google Scholar] [CrossRef]
- Peng, K.; Lin, F.; Chen, B.M. Online Schedule for Autonomy of Multiple Unmanned Aerial Vehicles. Sci. China Inf. Sci. 2017, 60, 072203. [Google Scholar] [CrossRef]
- Peters, J.R.; Bertuccelli, L.F. Robust Task Scheduling for Multi-Operator Supervisory Control Missions. J. Aerosp. Inf. Syst. 2016, 13, 393–406. [Google Scholar] [CrossRef]
- Torabbeigi, M.; Lim, G.J.; Kim, S.J. Drone Delivery Scheduling Optimization Considering Payload-Induced Battery Consumption Rates. J. Intell. Robot. Syst. 2020, 97, 471–487. [Google Scholar] [CrossRef]
- Xia, J.; Wang, K.; Wang, S. Drone Scheduling to Monitor Vessels in Emission Control Areas. Transp. Res. Part B Methodol. 2019, 119, 174–196. [Google Scholar] [CrossRef]
- Mbiadou Saleu, R.G.; Deroussi, L.; Feillet, D.; Grangeon, N.; Quilliot, A. The Parallel Drone Scheduling Problem with Multiple Drones and Vehicles. Eur. J. Oper. Res. 2022, 300, 571–589. [Google Scholar] [CrossRef]
- Ghelichi, Z. Drone Location and Scheduling Problems in Humanitarian Logistics. Electron. Diss. 2021. [CrossRef]
- Jondhale, S.R.; Maheswar, R.; Lloret, J. Fundamentals of Wireless Sensor Networks. In Received Signal Strength Based Target Localization and Tracking Using Wireless Sensor Networks; Jondhale, S.R., Maheswar, R., Lloret, J., Eds.; EAI/Springer Innovations in Communication and Computing; Springer: Cham, Switzerland, 2022; pp. 1–19. ISBN 978-3-030-74061-0. [Google Scholar]
- Dargie, W.; Poellabauer, C. Fundamentals of Wireless Sensor Networks: Theory and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2010; ISBN 978-0-470-97568-8. [Google Scholar]
- Griffin, B.; Detweiler, C. Resonant Wireless Power Transfer to Ground Sensors from a UAV. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–18 May 2012; pp. 2660–2665. [Google Scholar]
- Hui, S.Y.R.; Zhong, W.; Lee, C.K. A Critical Review of Recent Progress in Mid-Range Wireless Power Transfer. IEEE Trans. Power Electron. 2014, 29, 4500–4511. [Google Scholar] [CrossRef]
- Mase, K. How to Deliver Your Message from/to a Disaster Area. IEEE Commun. Mag. 2011, 49, 52–57. [Google Scholar] [CrossRef]
- Duong, T.Q.; Nguyen, L.D.; Nguyen, L.K. Practical Optimisation of Path Planning and Completion Time of Data Collection for UAV-Enabled Disaster Communications. In Proceedings of the 2019 15th International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 372–377. [Google Scholar]
- Deepak, G.C.; Ladas, A.; Sambo, Y.A.; Pervaiz, H.; Politis, C.; Imran, M.A. An Overview of Post-Disaster Emergency Communication Systems in the Future Networks. IEEE Wirel. Commun. 2019, 26, 132–139. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Unmanned Aerial Vehicle with Underlaid Device-to-Device Communications: Performance and Tradeoffs. IEEE Trans. Wirel. Commun. 2016, 15, 3949–3963. [Google Scholar] [CrossRef]
- Pang, Y.; Zhang, Y.; Gu, Y.; Pan, M.; Han, Z.; Li, P. Efficient Data Collection for Wireless Rechargeable Sensor Clusters in Harsh Terrains Using UAVs. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 234–239. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile Internet of Things: Can UAVs Provide an Energy-Efficient Mobile Architecture? In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Choi, D.H.; Kim, S.H.; Sung, D.K. Energy-Efficient Maneuvering and Communication of a Single UAV-Based Relay. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2320–2327. [Google Scholar] [CrossRef]
- Caunhye, A.M.; Nie, X.; Pokharel, S. Optimization Models in Emergency Logistics: A Literature Review. Socio-Econ. Plan. Sci. 2012, 46, 4–13. [Google Scholar] [CrossRef]
- Priya, P.; Kamlu, S.S. Robust Control Algorithm for Drones; IntechOpen: London, UK, 2022; ISBN 978-1-80355-301-6. [Google Scholar]
- Kruse, R.; Mostaghim, S.; Borgelt, C.; Braune, C.; Steinbrecher, M. Computational Intelligence: A Methodological Introduction; Springer: Cham, Switzerland, 2022; ISBN 978-3-030-42227-1. [Google Scholar]
- Sahil; Sood, S.K. Fog-Assisted Energy Efficient Cyber Physical System for Panic-Based Evacuation during Disasters. Comput. J. 2022, 65, 1540–1559. [Google Scholar] [CrossRef]
- Ejaz, W.; Ahmed, A.; Mushtaq, A.; Ibnkahla, M. Energy-Efficient Task Scheduling and Physiological Assessment in Disaster Management Using UAV-Assisted Networks. Comput. Commun. 2020, 155, 150–157. [Google Scholar] [CrossRef]
- Park, K.-N.; Kang, J.-H.; Cho, B.-M.; Park, K.-J.; Kim, H. Handover Management of Net-Drones for Future Internet Platforms. Int. J. Distrib. Sens. Netw. 2016, 12, 5760245. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Agrawal, D.P.; Zhang, S. Communication and Networking of UAV-Based Systems: Classification and Associated Architectures. J. Netw. Comput. Appl. 2017, 84, 93–108. [Google Scholar] [CrossRef]
- Liang, Y.; Xu, W.; Liang, W.; Peng, J.; Jia, X.; Zhou, Y.; Duan, L. Nonredundant Information Collection in Rescue Applications via an Energy-Constrained UAV. IEEE Internet Things J. 2019, 6, 2945–2958. [Google Scholar] [CrossRef]
- Li, J.; Kacimi, R.; Liu, T.; Ma, X.; Dhaou, R. Non-Terrestrial Networks-Enabled Internet of Things: UAV-Centric Architectures, Applications, and Open Issues. Drones 2022, 6, 95. [Google Scholar] [CrossRef]
- Liu, M.; Yang, J.; Gui, G. DSF-NOMA: UAV-Assisted Emergency Communication Technology in a Heterogeneous Internet of Things. IEEE Internet Things J. 2019, 6, 5508–5519. [Google Scholar] [CrossRef]
- Liu, X.; Li, Z.; Zhao, N.; Meng, W.; Gui, G.; Chen, Y.; Adachi, F. Transceiver Design and Multihop D2D for UAV IoT Coverage in Disasters. IEEE Internet Things J. 2019, 6, 1803–1815. [Google Scholar] [CrossRef]
- Liu, X.; Ansari, N. Resource Allocation in UAV-Assisted M2M Communications for Disaster Rescue. IEEE Wirel. Commun. Lett. 2019, 8, 580–583. [Google Scholar] [CrossRef]
- Na, Z.; Liu, Y.; Shi, J.; Liu, C.; Gao, Z. UAV-Supported Clustered NOMA for 6G-Enabled Internet of Things: Trajectory Planning and Resource Allocation. IEEE Internet Things J. 2021, 8, 15041–15048. [Google Scholar] [CrossRef]
- Sikeridis, D.; Tsiropoulou, E.E.; Devetsikiotis, M.; Papavassiliou, S. Wireless Powered Public Safety IoT: A UAV-Assisted Adaptive-Learning Approach towards Energy Efficiency. J. Netw. Comput. Appl. 2018, 123, 69–79. [Google Scholar] [CrossRef]
- Feng, W.; Tang, J.; Yu, Y.; Song, J.; Zhao, N.; Chen, G.; Wong, K.-K.; Chambers, J. UAV-Enabled SWIPT in IoT Networks for Emergency Communications. IEEE Wirel. Commun. 2020, 27, 140–147. [Google Scholar] [CrossRef]
- Trotta, A.; Montecchiari, L.; Felice, M.D.; Bononi, L. A GPS-Free Flocking Model for Aerial Mesh Deployments in Disaster-Recovery Scenarios. IEEE Access 2020, 8, 91558–91573. [Google Scholar] [CrossRef]
- Sacco, A.; Flocco, M.; Esposito, F.; Marchetto, G. An Architecture for Adaptive Task Planning in Support of IoT-Based Machine Learning Applications for Disaster Scenarios. Comput. Commun. 2020, 160, 769–778. [Google Scholar] [CrossRef]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Shah, N.S.M.; Alsamhi, S.H.; Abdullah, Q. Energy-Efficient Tethered UAV Deployment in B5G for Smart Environments and Disaster Recovery. In Proceedings of the 2021 1st International Conference on Emerging Smart Technologies and Applications (eSmarTA), Sana’a, Yemen, 10–12 August 2021; pp. 1–5. [Google Scholar]
- Zhang, L.; Zhang, Z.-Y.; Min, L.; Tang, C.; Zhang, H.-Y.; Wang, Y.-H.; Cai, P. Task Offloading and Trajectory Control for UAV-Assisted Mobile Edge Computing Using Deep Reinforcement Learning. IEEE Access 2021, 9, 53708–53719. [Google Scholar] [CrossRef]
- Na, Z.; Mao, B.; Shi, J.; Wang, J.; Gao, Z.; Xiong, M. Joint Trajectory and Power Optimization for UAV-Relay-Assisted Internet of Things in Emergency. Phys. Commun. 2020, 41, 101100. [Google Scholar] [CrossRef]
- Hassija, V.; Saxena, V.; Chamola, V. A Blockchain-Based Framework for Drone-Mounted Base Stations in Tactile Internet Environment. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 261–266. [Google Scholar]
- Seid, A.M.; Boateng, G.O.; Mareri, B.; Sun, G.; Jiang, W. Multi-Agent DRL for Task Offloading and Resource Allocation in Multi-UAV Enabled IoT Edge Network. IEEE Trans. Netw. Serv. Manag. 2021, 18, 4531–4547. [Google Scholar] [CrossRef]
- Avanzato, R.; Beritelli, F. An Innovative Technique for Identification of Missing Persons in Natural Disaster Based on Drone-Femtocell Systems. Sensors 2019, 19, 4547. [Google Scholar] [CrossRef] [PubMed]
- Tran, D.-H.; Nguyen, V.-D.; Chatzinotas, S.; Vu, T.X.; Ottersten, B. UAV Relay-Assisted Emergency Communications in IoT Networks: Resource Allocation and Trajectory Optimization. IEEE Trans. Wirel. Commun. 2022, 21, 1621–1637. [Google Scholar] [CrossRef]
- Almalki, F.A.; Soufiene, B.O. Modifying Hata-Davidson Propagation Model for Remote Sensing in Complex Environments Using a Multifactional Drone. Sensors 2022, 22, 1786. [Google Scholar] [CrossRef]
- Mao, S.; He, S.; Wu, J. Joint UAV Position Optimization and Resource Scheduling in Space-Air-Ground Integrated Networks With Mixed Cloud-Edge Computing. IEEE Syst. J. 2021, 15, 3992–4002. [Google Scholar] [CrossRef]
- Jia, Z.; Wu, Q.; Dong, C.; Yuen, C.; Han, Z. Hierarchical Aerial Computing for Internet of Things via Cooperation of HAPs and UAVs. IEEE Internet Things J. 2022, 10, 5676–5688. [Google Scholar] [CrossRef]
- Shimada, H.; Kawamoto, Y.; Kato, N. Novel Computation and Communication Resources Allocation Using Relay Communications in UAV-Mounted Cloudlet Systems. IEEE Trans. Netw. Sci. Eng. 2021, 8, 3140–3151. [Google Scholar] [CrossRef]
- Ferranti, L.; D’Oro, S.; Bonati, L.; Cuomo, F.; Melodia, T. HIRO-NET: Heterogeneous Intelligent Robotic Network for Internet Sharing in Disaster Scenarios. IEEE Trans. Mob. Comput. 2022, 21, 4367–4380. [Google Scholar] [CrossRef]
- Niu, Z.; Liu, H.; Lin, X.; Du, J. Task Scheduling With UAV-Assisted Dispersed Computing for Disaster Scenario. IEEE Syst. J. 2022, 16, 6429–6440. [Google Scholar] [CrossRef]
- Dai, B.; Niu, J.; Ren, T.; Hu, Z.; Atiquzzaman, M. Towards Energy-Efficient Scheduling of UAV and Base Station Hybrid Enabled Mobile Edge Computing. IEEE Trans. Veh. Technol. 2022, 71, 915–930. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, D.; Huang, Z.; Zhang, H.; Liang, X. LIDAUS: Localization of IoT Device via Anchor UAV SLAM. In Proceedings of the 2020 IEEE 39th International Performance Computing and Communications Conference (IPCCC), Austin, TX, USA, 6–8 November 2020; pp. 1–11. [Google Scholar]
- Esposito, C.; Zhao, Z.; Alcarria, R.; Rizzo, G. Game Theoretic Optimal User Association in Emergency Networks. In Proceedings of the Ad-Hoc, Mobile, and Wireless Networks, Luxembourg, 1–3 October 2019; Palattella, M.R., Scanzio, S., Coleri Ergen, S., Eds.; Springer: Cham, Switzerland, 2019; pp. 18–31. [Google Scholar]
- Rael, K.; Fragkos, G.; Plusquellic, J.; Tsiropoulou, E.E. UAV-Enabled Human Internet of Things. In Proceedings of the 2020 16th International Conference on Distributed Computing in Sensor Systems (DCOSS), Marina del Rey, CA, USA, 25–27 May 2020; pp. 312–319. [Google Scholar]
- Khan, A.; Zhang, J.; Ahmad, S.; Memon, S.; Qureshi, H.A.; Ishfaq, M. Dynamic Positioning and Energy-Efficient Path Planning for Disaster Scenarios in 5G-Assisted Multi-UAV Environments. Electronics 2022, 11, 2197. [Google Scholar] [CrossRef]
- Muthanna, M.S.A.; Muthanna, A.; Nguyen, T.N.; Alshahrani, A.; Abd El-Latif, A.A. Towards Optimal Positioning and Energy-Efficient UAV Path Scheduling in IoT Applications. Comput. Commun. 2022, 191, 145–160. [Google Scholar] [CrossRef]
- Xing, R.; Su, Z.; Luan, T.H.; Xu, Q.; Wang, Y.; Li, R.; Benslimane, A. UAVs Assisted Secure Blockchain Offline Transactions for V2V Charging Among Electric Vehicles in Disaster Area. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 4211–4216. [Google Scholar]
- Zhang, L.; Jabbari, B.; Ansari, N. Deep Reinforcement Learning Driven UAV-Assisted Edge Computing. IEEE Internet Things J. 2022, 9, 25449–25459. [Google Scholar] [CrossRef]
- Shen, S.; Ma, Z.; Liu, M.; Liu, Q.; Bai, Y.; Xiong, M. A Cloud-Terminal Collaborative System for Crowd Counting and Localization Using Multi-UAVs. In Proceedings of the IEEE INFOCOM 2022—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), New York, NY, USA, 2–5 May 2022; pp. 1–6. [Google Scholar]
- Yu, X.-Y.; Niu, W.-J.; Zhu, Y.; Zhu, H.-B. UAV-Assisted Cooperative Offloading Energy Efficiency System for Mobile Edge Computing. Digit. Commun. Netw. 2022. [CrossRef]
- Barick, S.; Singhal, C. Multi-UAV Assisted IoT NOMA Uplink Communication System for Disaster Scenario. IEEE Access 2022, 10, 34058–34068. [Google Scholar] [CrossRef]
- Chen, R.; Sun, Y.; Liang, L.; Cheng, W. Joint Power Allocation and Placement Scheme for UAV-Assisted IoT With QoS Guarantee. IEEE Trans. Veh. Technol. 2022, 71, 1066–1071. [Google Scholar] [CrossRef]
- Ghosh, S.; Roy, S.D.; Kundu, S. A T-BS and a UAV Based IoT Enabled D2D Network for Disaster Management. In Proceedings of the 2021 IEEE 18th India Council International Conference (INDICON), Guwahati, India, 19–21 December 2021; pp. 1–7. [Google Scholar]
- Ding, Y.; Yu, P.; Li, W.; Feng, L.; Zhou, F. Optimal Deployment Methods of Multi-UAVs for Capacity Enhancement under Weak Coverage. In Proceedings of the 2021 Computing, Communications and IoT Applications (ComComAp), Shenzhen, China, 26–28 November 2021; pp. 280–285. [Google Scholar]
- Zhang, Z.; Cui, Q.; Li, X.; Li, X.; Tao, X. Satellite/UAV-Assisted Computing and Offloading IoT Networks with Spectrum Sharing: An Energy-Efficient Design. In Proceedings of the 2021 26th IEEE Asia-Pacific Conference on Communications (APCC), Kuala Lumpur, Malaysia, 11–13 October 2021; pp. 185–191. [Google Scholar]
- Lee, I.; Babu, V.; Caesar, M.; Nicol, D. Deep Reinforcement Learning for UAV-Assisted Emergency Response. In Proceedings of the MobiQuitous 2020—17th EAI International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services, Darmstadt, Germany, 7–9 December 2020; Association for Computing Machinery: New York, NY, USA, 2021; pp. 327–336. [Google Scholar]
- Wang, X.; Hu, J.; Lin, H. An Intelligent UAV Based Data Aggregation Strategy for IoT after Disaster Scenarios. In Proceedings of the 2nd ACM MobiCom Workshop on Drone Assisted Wireless Communications for 5G and Beyond, London, UK, 25 September 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 97–101. [Google Scholar]
- Shimaday, H.; Kawamotoy, Y.; Katoy, N. Novel Workload Balancing Method for UAV-Based Edge Cloud Computing Systems with Handover. In Proceedings of the ICC 2020–2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Li, X.; Xing, L. Efficient Optimal Backhaul-Aware Placement of Multiple Drone-Cells Based on Genetic Algorithm. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 332–339. [Google Scholar]
- Feng, W.; Tang, J.; Zhao, N.; Fu, Y.; Zhang, X.; Cumanan, K.; Wong, K.-K. NOMA-Based UAV-Aided Networks for Emergency Communications. China Commun. 2020, 17, 54–66. [Google Scholar] [CrossRef]
- Bushnaq, O.M.; Chaaban, A.; Al-Naffouri, T.Y. The Role of UAV-IoT Networks in Future Wildfire Detection. IEEE Internet Things J. 2021, 8, 16984–16999. [Google Scholar] [CrossRef]
- Karunanithy, K.; Bhanumathi, V. Unmanned Aerial Vehicle Based Reliable and Energy Efficient Data Collection from Red Alerted Area Using Wireless Sensor Networks with IoT. J. Inf. Sci. Eng. 2019, 35, 521–536. [Google Scholar] [CrossRef]
- Abdelhamid, S. UAV Path Planning for Emergency Management in IoT. In Proceedings of the 2018 IEEE International Conference on Communications Workshops (ICC Workshops), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Van Huynh, D.; Do-Duy, T.; Nguyen, L.D.; Le, M.-T.; Vo, N.-S.; Duong, T.Q. Real-Time Optimized Path Planning and Energy Consumption for Data Collection in Unmanned Ariel Vehicles-Aided Intelligent Wireless Sensing. IEEE Trans. Ind. Inform. 2022, 18, 2753–2761. [Google Scholar] [CrossRef]
- Kumar, J.S.; Pandey, S.K.; Zaveri, M.A.; Choksi, M. Geo-Fencing Technique in Unmanned Aerial Vehicles for Post Disaster Management in the Internet of Things. In Proceedings of the 2019 Second International Conference on Advanced Computational and Communication Paradigms (ICACCP), Gangtok, India, 25–28 February 2019; pp. 1–6. [Google Scholar]
- Li, G.; He, B.; Wang, Z.; Cheng, X.; Chen, J. Blockchain-Enhanced Spatiotemporal Data Aggregation for UAV-Assisted Wireless Sensor Networks. IEEE Trans. Ind. Inform. 2022, 18, 4520–4530. [Google Scholar] [CrossRef]
- Nguyen, L.-M.-D.; Vo, V.N.; So-In, C.; Dang, V.-H. Throughput Analysis and Optimization for NOMA Multi-UAV Assisted Disaster Communication Using CMA-ES. Wirel. Netw 2021, 27, 4889–4902. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Localization and Clustering Based on Swarm Intelligence in UAV Networks for Emergency Communications. IEEE Internet Things J. 2019, 6, 8958–8976. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Bio-Inspired Approaches for Energy-Efficient Localization and Clustering in UAV Networks for Monitoring Wildfires in Remote Areas. IEEE Access 2021, 9, 18649–18669. [Google Scholar] [CrossRef]
- Ma, B.; Ren, Z.; Cheng, W. Credibility Computation Offloading Based Task-Driven Routing Strategy for Emergency UAVs Network. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar]
- Su, Z.; Wang, Y.; Xu, Q.; Zhang, N. LVBS: Lightweight Vehicular Blockchain for Secure Data Sharing in Disaster Rescue. IEEE Trans. Dependable Secur. Comput. 2022, 19, 19–32. [Google Scholar] [CrossRef]
- Pokhrel, S.R. Federated Learning Meets Blockchain at 6G Edge: A Drone-Assisted Networking for Disaster Response. In Proceedings of the 2nd ACM MobiCom Workshop on Drone Assisted Wireless Communications for 5G and Beyond, London UK, 25 September 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 49–54. [Google Scholar]
- Tipantuña, C.; Hesselbach, X.; Sánchez-Aguero, V.; Valera, F.; Vidal, I.; Nogales, B. An NFV-Based Energy Scheduling Algorithm for a 5G Enabled Fleet of Programmable Unmanned Aerial Vehicles. Wirel. Commun. Mob. Comput. 2019, 2019, e4734821. [Google Scholar] [CrossRef]
- Sliwa, B.; Schüler, C.; Patchou, M.; Wietfeld, C. PARRoT: Predictive Ad-Hoc Routing Fueled by Reinforcement Learning and Trajectory Knowledge. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–7. [Google Scholar]
- Bharany, S.; Sharma, S.; Frnda, J.; Shuaib, M.; Khalid, M.I.; Hussain, S.; Iqbal, J.; Ullah, S.S. Wildfire Monitoring Based on Energy Efficient Clustering Approach for FANETS. Drones 2022, 6, 193. [Google Scholar] [CrossRef]
- Shehzad, M.K.; Hassan, S.A.; Luque-Nieto, M.A.; Otero, P. UAV Trajectory Optimization and Choice for UAV Placement for Data Collection in Beyond 5G Networks. In Intelligent Unmanned Air Vehicles Communications for Public Safety Networks; Kaleem, Z., Ahmad, I., Duong, T.Q., Eds.; Unmanned System Technologies; Springer: Singapore, 2022; pp. 133–144. ISBN 978-981-19129-2-4. [Google Scholar]
- Cheng, N.; Lyu, F.; Quan, W.; Zhou, C.; He, H.; Shi, W.; Shen, X. Space/Aerial-Assisted Computing Offloading for IoT Applications: A Learning-Based Approach. IEEE J. Sel. Areas Commun. 2019, 37, 1117–1129. [Google Scholar] [CrossRef]
- Aljehani, M.; Inoue, M.; Watanbe, A.; Yokemura, T.; Ogyu, F.; Iida, H. UAV Communication System Integrated into Network Traversal with Mobility. SN Appl. Sci. 2020, 2, 1057. [Google Scholar] [CrossRef]
- Prathiba, S.B.; Raja, G.; Anbalagan, S.; Narayanan, R.; Venkata Karthik, K.B. SOSChain: Self Optimizing Streamchain for Last-Mile 6G UAV-Truck Networks. In Proceedings of the 1st Workshop on Artificial Intelligence and Blockchain Technologies for Smart Cities with 6G, New Orleans, LA, USA, 25–29 October 2021; Association for Computing Machinery: New York, NY, USA, 2021; pp. 19–24. [Google Scholar]
- Mao, Y.; You, C.; Zhang, J.; Huang, K.; Letaief, K.B. A Survey on Mobile Edge Computing: The Communication Perspective. IEEE Commun. Surv. Tutor. 2017, 19, 2322–2358. [Google Scholar] [CrossRef]
- Cheng, N.; Xu, W.; Shi, W.; Zhou, Y.; Lu, N.; Zhou, H.; Shen, X. Air-Ground Integrated Mobile Edge Networks: Architecture, Challenges, and Opportunities. IEEE Commun. Mag. 2018, 56, 26–32. [Google Scholar] [CrossRef]
- Kim, K.; Hong, C.S. Optimal Task-UAV-Edge Matching for Computation Offloading in UAV Assisted Mobile Edge Computing. In Proceedings of the 2019 20th Asia-Pacific Network Operations and Management Symposium (APNOMS), Matsue, Japan, 18–20 September 2019; pp. 1–4. [Google Scholar]
- Xu, J.; Ota, K.; Dong, M. Big Data on the Fly: UAV-Mounted Mobile Edge Computing for Disaster Management. IEEE Trans. Netw. Sci. Eng. 2020, 7, 2620–2630. [Google Scholar] [CrossRef]
- Sacco, A.; Esposito, F.; Marchetto, G. Resource Inference for Task Migration in Challenged Edge Networks with RITMO. In Proceedings of the 2020 IEEE 9th International Conference on Cloud Networking (CloudNet), Piscataway, NJ, USA, 9–11 November 2020; pp. 1–7. [Google Scholar]
- Ventrella, A.V.; Esposito, F.; Sacco, A.; Flocco, M.; Marchetto, G.; Gururajan, S. APRON: An Architecture for Adaptive Task Planning of Internet of Things in Challenged Edge Networks. In Proceedings of the 2019 IEEE 8th International Conference on Cloud Networking (CloudNet), Coimbra, Portugal, 4–6 November 2019; pp. 1–6. [Google Scholar]
- Cheikhrouhou, O.; Koubaa, A.; Zarrad, A. A Cloud Based Disaster Management System. J. Sens. Actuator Netw. 2020, 9, 6. [Google Scholar] [CrossRef]
- Wang, Y.; Su, Z.; Xu, Q.; Li, R.; Luan, T.H. Lifesaving with RescueChain: Energy-Efficient and Partition-Tolerant Blockchain Based Secure Information Sharing for UAV-Aided Disaster Rescue. In Proceedings of the IEEE INFOCOM 2021—IEEE Conference on Computer Communications, Vancouver, BC, Canada, 10–13 May 2021; pp. 1–10. [Google Scholar]
- Rashid, M.T.; Zhang, D.Y.; Shang, L.; Wang, D. SEAD: Towards A Social-Media-Driven Energy-Aware Drone Sensing Framework. In Proceedings of the 2019 IEEE 25th International Conference on Parallel and Distributed Systems (ICPADS), Tianjin, China, 4–6 December 2019; pp. 647–654. [Google Scholar]
- Rashid, M.T.; Zhang, Y.; Zhang, D.; Wang, D. CompDrone: Towards Integrated Computational Model and Social Drone Based Wildfire Monitoring. In Proceedings of the 2020 16th International Conference on Distributed Computing in Sensor Systems (DCOSS), Marina del Rey, CA, USA, 25–27 May 2020; pp. 43–50. [Google Scholar]
- Rashid, M.T.; Zhang, D.Y.; Wang, D. SocialDrone: An Integrated Social Media and Drone Sensing System for Reliable Disaster Response. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 218–227. [Google Scholar]
- Rashid, M.T.; Zhang, D.; Liu, Z.; Lin, H.; Wang, D. CollabDrone: A Collaborative Spatiotemporal-Aware Drone Sensing System Driven by Social Sensing Signals. In Proceedings of the 2019 28th International Conference on Computer Communication and Networks (ICCCN), Valencia, Spain, 29 July–1 August 2019; pp. 1–9. [Google Scholar]
- Terzi, M.; Kolios, P.; Panayiotou, C.; Theocharides, T. Towards a Social-Media Driven Multi-Drone Tasking Platform. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 573–581. [Google Scholar]
- Attari, N.; Ofli, F.; Awad, M.; Lucas, J.; Chawla, S. Nazr-CNN: Fine-Grained Classification of UAV Imagery for Damage Assessment. In Proceedings of the 2017 IEEE International Conference on Data Science and Advanced Analytics (DSAA), Tokyo, Japan, 19–21 October 2017; pp. 50–59. [Google Scholar]
- Wang, H.; Liu, C.H.; Dai, Z.; Tang, J.; Wang, G. Energy-Efficient 3D Vehicular Crowdsourcing for Disaster Response by Distributed Deep Reinforcement Learning. In Proceedings of the 27th ACM SIGKDD Conference on Knowledge Discovery & Data Mining, San Francisco, CA, USA, 13–17 August 2016; Association for Computing Machinery: New York, NY, USA, 2021; pp. 3679–3687. [Google Scholar]
- Zhou, F.; Huang, J.; Sun, B.; Wen, G.; Tian, Y. Intelligent Identification Method for Natural Disasters along Transmission Lines Based on Inter-Frame Difference and Regional Convolution Neural Network. In Proceedings of the 2019 IEEE Intl Conf on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking (ISPA/BDCloud/SocialCom/SustainCom), Xiamen, China, 16–18 December 2019; pp. 218–222. [Google Scholar]
- Wang, R.; Zhao, J.; Wu, W.; Chen, B.; Liu, B. Recognition and Locating of Damaged Poles in Distribution Network Through Images Shot by Unmanned Aerial Vehicle (UA V). In Proceedings of the 2020 IEEE International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA), Chongqing, China, 6–8 November 2020; Volume 1, pp. 1048–1052. [Google Scholar]
- Xu, J.; Ota, K.; Dong, M. LUNA: Lightweight UAV Navigation Based on Airborne Vision for Disaster Management. In Proceedings of the 2019 International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Atlanta, GA, USA, 14–17 July 2019; pp. 315–322. [Google Scholar]
- Popescu, D.; Ichim, L.; Stoican, F. Flooded Area Segmentation from UAV Images Based on Generative Adversarial Networks. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 18–21 November 2018; pp. 1361–1366. [Google Scholar]
- Na, W.; Bae, B.; Cho, S.; Kim, N. DL-TCP: Deep Learning-Based Transmission Control Protocol for Disaster 5G MmWave Networks. IEEE Access 2019, 7, 145134–145144. [Google Scholar] [CrossRef]
- Almeshal, A.M.; Alenezi, M.R. A Vision-Based Neural Network Controller for the Autonomous Landing of a Quadrotor on Moving Targets. Robotics 2018, 7, 71. [Google Scholar] [CrossRef]
- Morocho-Cayamcela, M.E.; Lim, W.; Maier, M. An Optimal Location Strategy for Multiple Drone Base Stations in Massive MIMO. ICT Express 2022, 8, 230–234. [Google Scholar] [CrossRef]
- Pham, H.X.; La, H.M.; Feil-Seifer, D.; Van Nguyen, L. Reinforcement Learning for Autonomous UAV Navigation Using Function Approximation. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–6. [Google Scholar]
- Hernández, D.; Cano, J.-C.; Silla, F.; Calafate, C.T.; Cecilia, J.M. AI-Enabled Autonomous Drones for Fast Climate Change Crisis Assessment. IEEE Internet Things J. 2022, 9, 7286–7297. [Google Scholar] [CrossRef]
- Gregory, J.M.; Brookshaw, I.; Fink, J.; Gupta, S.K. An Investigation of Goal Assignment for a Heterogeneous Robotic Team to Enable Resilient Disaster-Site Exploration. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 133–140. [Google Scholar]
- Palafox, P.R.; Garzón, M.; Valente, J.; Roldán, J.J.; Barrientos, A. Robust Visual-Aided Autonomous Takeoff, Tracking, and Landing of a Small UAV on a Moving Landing Platform for Life-Long Operation. Appl. Sci. 2019, 9, 2661. [Google Scholar] [CrossRef]
- Xiang, H.; Yi, J.; Zhou, B.; Wu, H.; Mou, J. A Study of Autonomous Landing of UAV for Mobile Platform. In Proceedings of the 2021 International Conference on Intelligent Computing, Automation and Systems (ICICAS), Chongqing, China, 29–31 December 2021; pp. 455–461. [Google Scholar]
- Ivancevic, V.; Yue, Y. Hamiltonian Dynamics and Control of a Joint Autonomous Land–Air Operation. Nonlinear Dyn. 2016, 84, 1853–1865. [Google Scholar] [CrossRef]
- Moore, J.; Wolfe, K.C.; Johannes, M.S.; Katyal, K.D.; Para, M.P.; Murphy, R.J.; Hatch, J.; Taylor, C.J.; Bamberger, R.J.; Tunstel, E. Nested Marsupial Robotic System for Search and Sampling in Increasingly Constrained Environments. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 002279–002286. [Google Scholar]
- Ozkan, M.F.; Carrillo, L.R.G.; King, S.A. Rescue Boat Path Planning in Flooded Urban Environments. In Proceedings of the 2019 IEEE International Symposium on Measurement and Control in Robotics (ISMCR), Houston, TX, USA, 19–21 September 2019; pp. B2-2-1–B2-2-9. [Google Scholar]
- Kiribayashi, S.; Yakushigawa, K.; Nagatani, K. Position Estimation of Tethered Micro Unmanned Aerial Vehicle by Observing the Slack Tether. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 159–165. [Google Scholar]
- Wang, N.; Zheng, J.; Tong, J.; Zhang, K. Joint Location Selection and Supply Allocation for UAV Aided Disaster Response System. In Proceedings of the Intelligent Robotics and Applications, Shenyang, China, 8–11 August 2019; Yu, H., Liu, J., Liu, L., Ju, Z., Liu, Y., Zhou, D., Eds.; Springer: Cham, Switzerland, 2019; pp. 14–26. [Google Scholar]
- Gómez, N.; Peña, N.; Rincón, S.; Amaya, S.; Calderon, J. Leader-Follower Behavior in Multi-Agent Systems for Search and Rescue Based on PSO Approach. In Proceedings of the SoutheastCon 2022, Mobile, AL, USA, 26 March–3 April 2022; pp. 413–420. [Google Scholar]
- Xing, R.; Su, Z.; Luan, T.H.; Xu, Q.; Wang, Y.; Li, R. UAVs-Aided Delay-Tolerant Blockchain Secure Offline Transactions in Post-Disaster Vehicular Networks. IEEE Trans. Veh. Technol. 2022, 71, 12030–12043. [Google Scholar] [CrossRef]
- Hassija, V.; Chamola, V.; Krishna, D.N.G.; Guizani, M. A Distributed Framework for Energy Trading Between UAVs and Charging Stations for Critical Applications. IEEE Trans. Veh. Technol. 2020, 69, 5391–5402. [Google Scholar] [CrossRef]
- Li, J.; Shang, F. Investigation into the Reliability and Encryption Performance of Wireless Signal Transmission by Network Coding Combined with Blockchain in Natural Disaster Scenarios. Wirel. Commun. Mob. Comput. 2022, 2022, e4188436. [Google Scholar] [CrossRef]
- Betancourt, J.; Wojtkowski, B.; Castillo, P.; Thouvenin, I. Exocentric Control Scheme for Robot Applications: An Immersive Virtual Reality Approach. IEEE Trans. Vis. Comput. Graph. 2022. [CrossRef]
- Wang, Y.; Liu, E. Virtual Reality Technology of Multi UAVEarthquake Disaster Path Optimization. Math. Probl. Eng. 2021, 2021, e5525560. [Google Scholar] [CrossRef]
- Ren, X.; Sun, M.; Zhang, X.; Liu, L.; Wang, X.; Zhou, H. An AR Geo-Registration Algorithm for UAV TIR Video Streams Based on Dual-Antenna RTK-GPS. Remote Sens. 2022, 14, 2205. [Google Scholar] [CrossRef]
- Jain, G.; Yadav, G.; Prakash, D.; Shukla, A.; Tiwari, R. MVO-Based Path Planning Scheme with Coordination of UAVs in 3-D Environment. J. Comput. Sci. 2019, 37, 101016. [Google Scholar] [CrossRef]
- Kovacs, G.; Moshtari, M.; Kachali, H.; Polsa, P. Research Methods in Humanitarian Logistics. J. Humanit. Logist. Supply Chain Manag. 2019, 9, 325–331. [Google Scholar] [CrossRef]
- Lewin, R.; Besiou, M.; Lamarche, J.-B.; Cahill, S.; Guerrero-Garcia, S. Delivering in a Moving World…looking to Our Supply Chains to Meet the Increasing Scale, Cost and Complexity of Humanitarian Needs. J. Humanit. Logist. Supply Chain Manag. 2018, 8, 518–532. [Google Scholar] [CrossRef]
- Schiffling, S.; Hannibal, C.; Tickle, M.; Fan, Y. The Implications of Complexity for Humanitarian Logistics: A Complex Adaptive Systems Perspective. Ann. Oper. Res. 2022, 319, 1379–1410. [Google Scholar] [CrossRef]
- Day, J.M.; Melnyk, S.A.; Larson, P.D.; Davis, E.W.; Whybark, D.C. Humanitarian and Disaster Relief Supply Chains: A Matter of Life and Death. J. Supply Chain Manag. 2012, 48, 21–36. [Google Scholar] [CrossRef]
- Kunz, N.; Van Wassenhove, L.N.; Besiou, M.; Hambye, C.; Kovács, G. Relevance of Humanitarian Logistics Research: Best Practices and Way Forward. Int. J. Oper. Prod. Manag. 2017, 37, 1585–1599. [Google Scholar] [CrossRef]
- Kunz, N.; Reiner, G. A Meta-analysis of Humanitarian Logistics Research. Jrnl Hum Log Sup Chn Mnage 2012, 2, 116–147. [Google Scholar] [CrossRef]
- Kovács, G.; Spens, K.M. Humanitarian Logistics in Disaster Relief Operations. Int. J. Phys. Distrib. Logist. Manag. 2007, 37, 99–114. [Google Scholar] [CrossRef]
- Natarajarathinam, M.; Capar, I.; Narayanan, A. Managing Supply Chains in Times of Crisis: A Review of Literature and Insights. Int. J. Phys. Distrib. Logist. Manag. 2009, 39, 535–573. [Google Scholar] [CrossRef]
- Overstreet, R.E.; Hall, D.; Hanna, J.B.; Kelly Rainer, R. Research in Humanitarian Logistics. J. Humanit. Logist. Supply Chain. Manag. 2011, 1, 114–131. [Google Scholar] [CrossRef]
- Kovács, G.; Spens, K.M. Trends and Developments in Humanitarian Logistics—A Gap Analysis. Int. J. Phys. Distrib. Logist. Manag. 2011, 41, 32–45. [Google Scholar] [CrossRef]
- Besiou, M.; Stapleton, O.; Van Wassenhove, L.N. System Dynamics for Humanitarian Operations. J. Humanit. Logist. Supply Chain Manag. 2011, 1, 78–103. [Google Scholar] [CrossRef]
- Majewski, B.; Navangul, K.A.; Heigh, I. A Peek into the Future of Humanitarian Logistics: Forewarned Is Forearmed. Supply Chain Forum: Int. J. 2010, 11, 4–19. [Google Scholar] [CrossRef]
- Polater, A. Dynamic Capabilities in Humanitarian Supply Chain Management: A Systematic Literature Review. JHLSCM 2020, 11, 46–80. [Google Scholar] [CrossRef]
- Agarwal, S.; Kant, R.; Shankar, R. Humanitarian Supply Chain Management Frameworks: A Critical Literature Review and Framework for Future Development. BIJ 2019, 26, 1749–1780. [Google Scholar] [CrossRef]
- Sabbaghtorkan, M.; Batta, R.; He, Q. Prepositioning of Assets and Supplies in Disaster Operations Management: Review and Research Gap Identification. Eur. J. Oper. Res. 2020, 284, 1–19. [Google Scholar] [CrossRef]
- Bealt, J.; Mansouri, S.A. From Disaster to Development: A Systematic Review of Community-Driven Humanitarian Logistics. Disasters 2018, 42, 124–148. [Google Scholar] [CrossRef] [PubMed]
- Santana Robles, F.; Hernández-Gress, E.S.; Hernández-Gress, N.; Granillo Macias, R. Metaheuristics in the Humanitarian Supply Chain. Algorithms 2021, 14, 364. [Google Scholar] [CrossRef]
- Jahre, M. Humanitarian Supply Chain Strategies—A Review of How Actors Mitigate Supply Chain Risks. JHLSCM 2017, 7, 82–101. [Google Scholar] [CrossRef]
- Jiang, Y.; Yuan, Y. Emergency Logistics in a Large-Scale Disaster Context: Achievements and Challenges. Int. J. Environ. Res. Public Health 2019, 16, 779. [Google Scholar] [CrossRef] [PubMed]
- Prakash, C.; Besiou, M.; Charan, P.; Gupta, S. Organization Theory in Humanitarian Operations: A Review and Suggested Research Agenda. JHLSCM 2020, 10, 261–284. [Google Scholar] [CrossRef]
- Anjomshoae, A.; Banomyong, R.; Mohammed, F.; Kunz, N. A Systematic Review of Humanitarian Supply Chains Performance Measurement Literature from 2007 to 2021. Int. J. Disaster Risk Reduct. 2022, 72, 102852. [Google Scholar] [CrossRef]
- Fontainha, T.C.; Leiras, A.; de Bandeira, R.A.M.; Scavarda, L.F. Public-Private-People Relationship Stakeholder Model for Disaster and Humanitarian Operations. Int. J. Disaster Risk Reduct. 2017, 22, 371–386. [Google Scholar] [CrossRef]
- Farahani, R.Z.; Lotfi, M.M.; Baghaian, A.; Ruiz, R.; Rezapour, S. Mass Casualty Management in Disaster Scene: A Systematic Review of OR&MS Research in Humanitarian Operations. Eur. J. Oper. Res. 2020, 287, 787–819. [Google Scholar] [CrossRef]
- Lettieri, E.; Masella, C.; Radaelli, G. Disaster Management: Findings from a Systematic Review. Disaster Prev. Manag. 2009, 18, 117–136. [Google Scholar] [CrossRef]
- Cooper, B.; Behnke, N.L.; Cronk, R.; Anthonj, C.; Shackelford, B.B.; Tu, R.; Bartram, J. Environmental Health Conditions in the Transitional Stage of Forcible Displacement: A Systematic Scoping Review. Sci. Total Environ. 2021, 762, 143136. [Google Scholar] [CrossRef]
- Shao, J.; Wang, X.; Liang, C.; Holguín-Veras, J. Research Progress on Deprivation Costs in Humanitarian Logistics. Int. J. Disaster Risk Reduct. 2020, 42, 101343. [Google Scholar] [CrossRef]
- Farooq, M.U.; Hussain, A.; Masood, T.; Habib, M.S. Supply Chain Operations Management in Pandemics: A State-of-the-Art Review Inspired by COVID-19. Sustainability 2021, 13, 2504. [Google Scholar] [CrossRef]
- Çelik, M. Network Restoration and Recovery in Humanitarian Operations: Framework, Literature Review, and Research Directions. Surv. Oper. Res. Manag. Sci. 2016, 21, 47–61. [Google Scholar] [CrossRef]
- Nurmala, N.; de Leeuw, S.; Dullaert, W. Humanitarian–Business Partnerships in Managing Humanitarian Logistics. SCM 2017, 22, 82–94. [Google Scholar] [CrossRef]
- Balcik, B.; Bozkir, C.D.C.; Kundakcioglu, O.E. A Literature Review on Inventory Management in Humanitarian Supply Chains. Surv. Oper. Res. Manag. Sci. 2016, 21, 101–116. [Google Scholar] [CrossRef]
- Anuar, W.K.; Lee, L.S.; Pickl, S.; Seow, H.-V. Vehicle Routing Optimisation in Humanitarian Operations: A Survey on Modelling and Optimisation Approaches. Appl. Sci. 2021, 11, 667. [Google Scholar] [CrossRef]
- Johnson, H.L.; Ling, C.G.; McBee, E.C. Multi-Disciplinary Care for the Elderly in Disasters: An Integrative Review. Prehospital Disaster Med. 2015, 30, 72–79. [Google Scholar] [CrossRef]
- Patel, B.S.; Sambasivan, M. A Systematic Review of the Literature on Supply Chain Agility. Manag. Res. Rev. 2021, 45, 236–260. [Google Scholar] [CrossRef]
- Khan, M.; Yong, L.H.; Han, B.J. A Systematic Review of Performance Enhancement of Humanitarian Logistics through Transparency: Current Status and Perspectives. Int. J. Supply Chain. Manag. 2019, 8, 549. [Google Scholar]
- Burkart, C.; Besiou, M.; Wakolbinger, T. The Funding—Humanitarian Supply Chain Interface. Surv. Oper. Res. Manag. Sci. 2016, 21, 31–45. [Google Scholar] [CrossRef]
- Rasouli, M.R. Intelligent Process-Aware Information Systems to Support Agility in Disaster Relief Operations: A Survey of Emerging Approaches. Int. J. Prod. Res. 2019, 57, 1857–1872. [Google Scholar] [CrossRef]
- Banomyong, R.; Varadejsatitwong, P.; Oloruntoba, R. A Systematic Review of Humanitarian Operations, Humanitarian Logistics and Humanitarian Supply Chain Performance Literature 2005 to 2016. Ann. Oper. Res. 2019, 283, 71–86. [Google Scholar] [CrossRef]
- Abidi, H.; de Leeuw, S.; Klumpp, M. Humanitarian Supply Chain Performance Management: A Systematic Literature Review. Supply Chain Manag. Int. J. 2014, 19, 592–608. [Google Scholar] [CrossRef]
- Yáñez-Sandivari, L.; Cortés, C.E.; Rey, P.A. Humanitarian Logistics and Emergencies Management: New Perspectives to a Sociotechnical Problem and Its Optimization Approach Management. Int. J. Disaster Risk Reduct. 2021, 52, 101952. [Google Scholar] [CrossRef]
- Seifert, L.; Kunz, N.; Gold, S. Humanitarian Supply Chain Management Responding to Refugees: A Literature Review. J. Humanit. Logist. Supply Chain. Manag. 2018, 8, 398–426. [Google Scholar] [CrossRef]
- Soosay, C.A.; Hyland, P. A Decade of Supply Chain Collaboration and Directions for Future Research. Supply Chain Manag. Int. J. 2015, 20, 613–630. [Google Scholar] [CrossRef]
- Leiras, A.; de Brito Jr, I.; Queiroz Peres, E.; Rejane Bertazzo, T.; Tsugunobu Yoshida Yoshizaki, H. Literature Review of Humanitarian Logistics Research: Trends and Challenges. J. Humanit. Logist. Supply Chain Manag. 2014, 4, 95–130. [Google Scholar] [CrossRef]
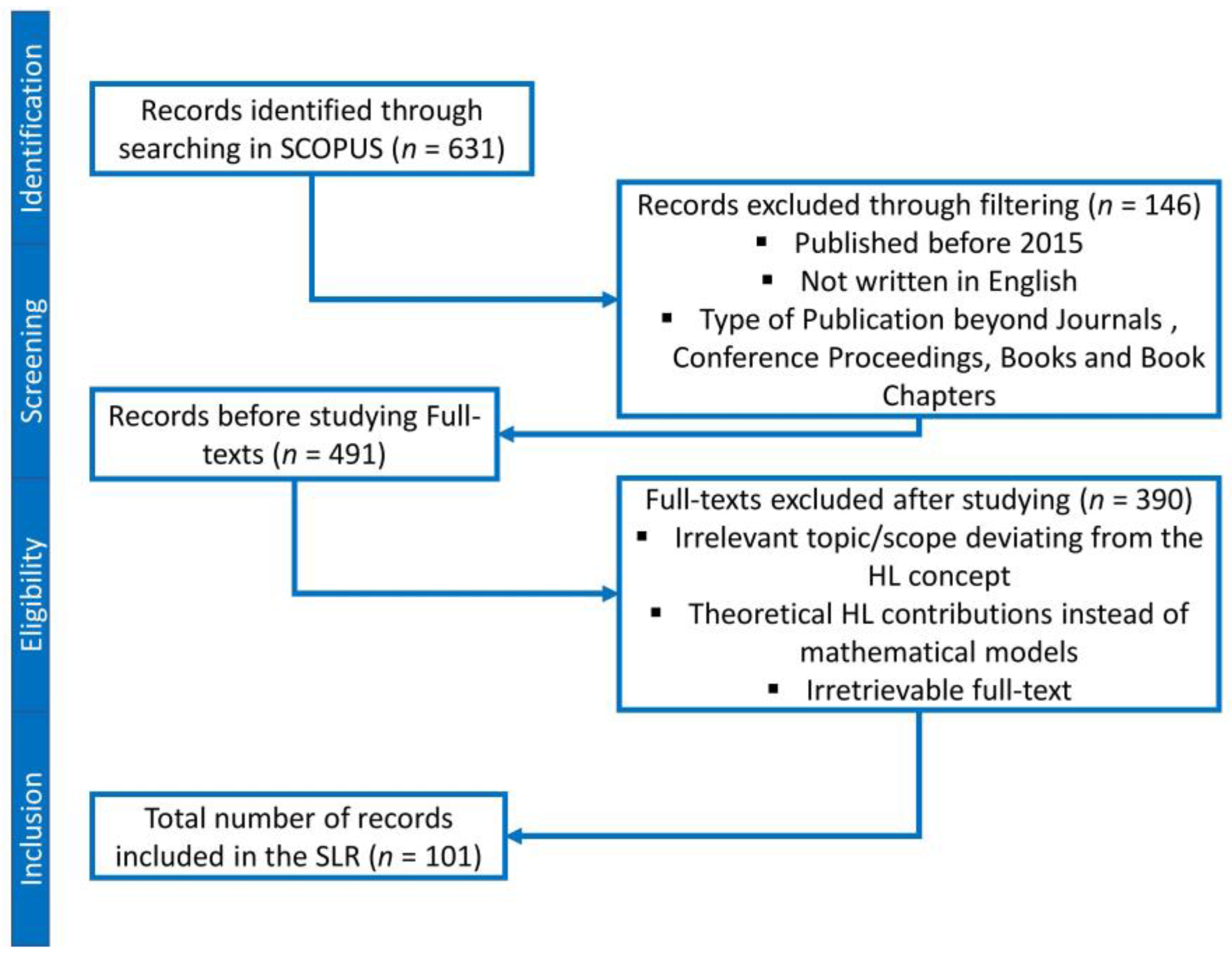
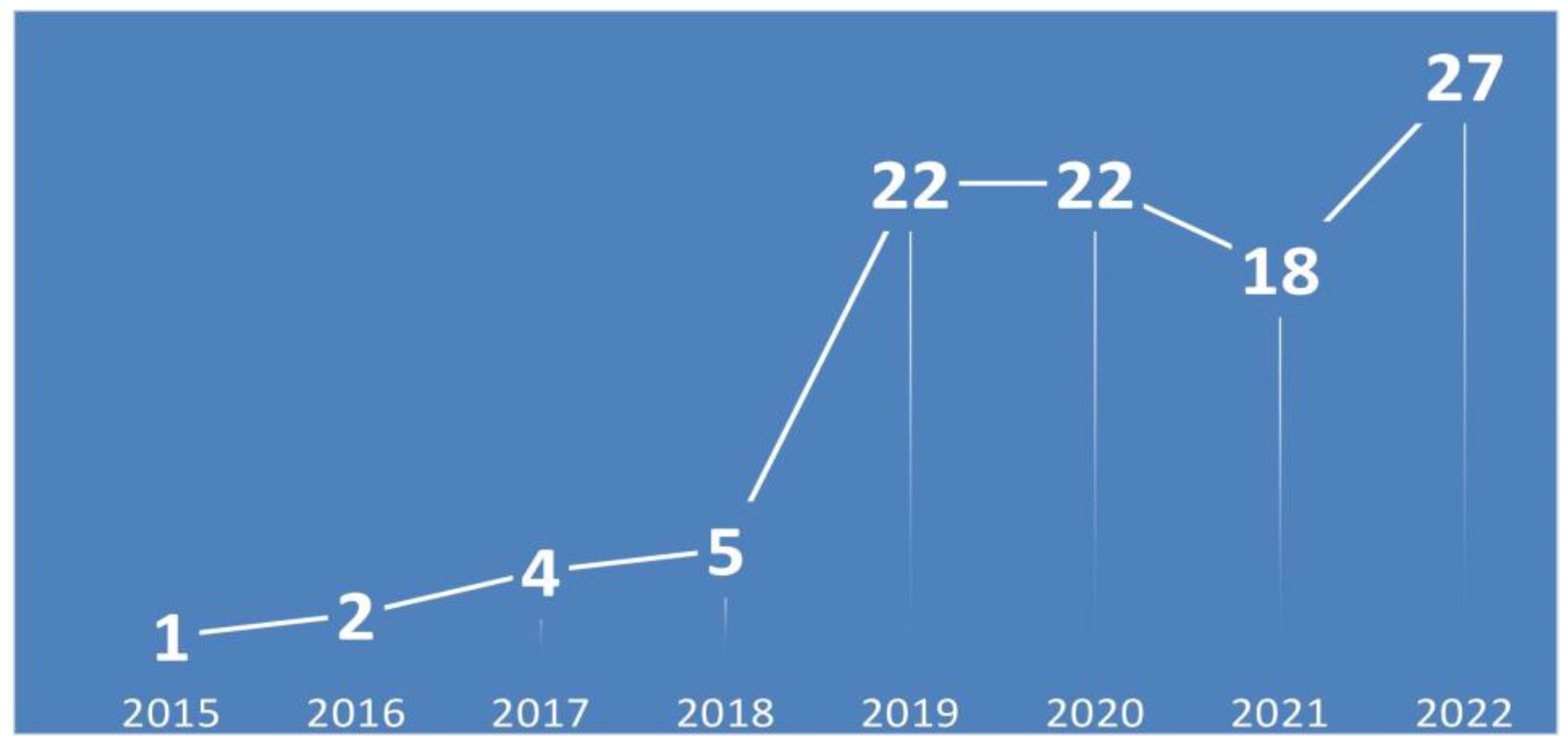
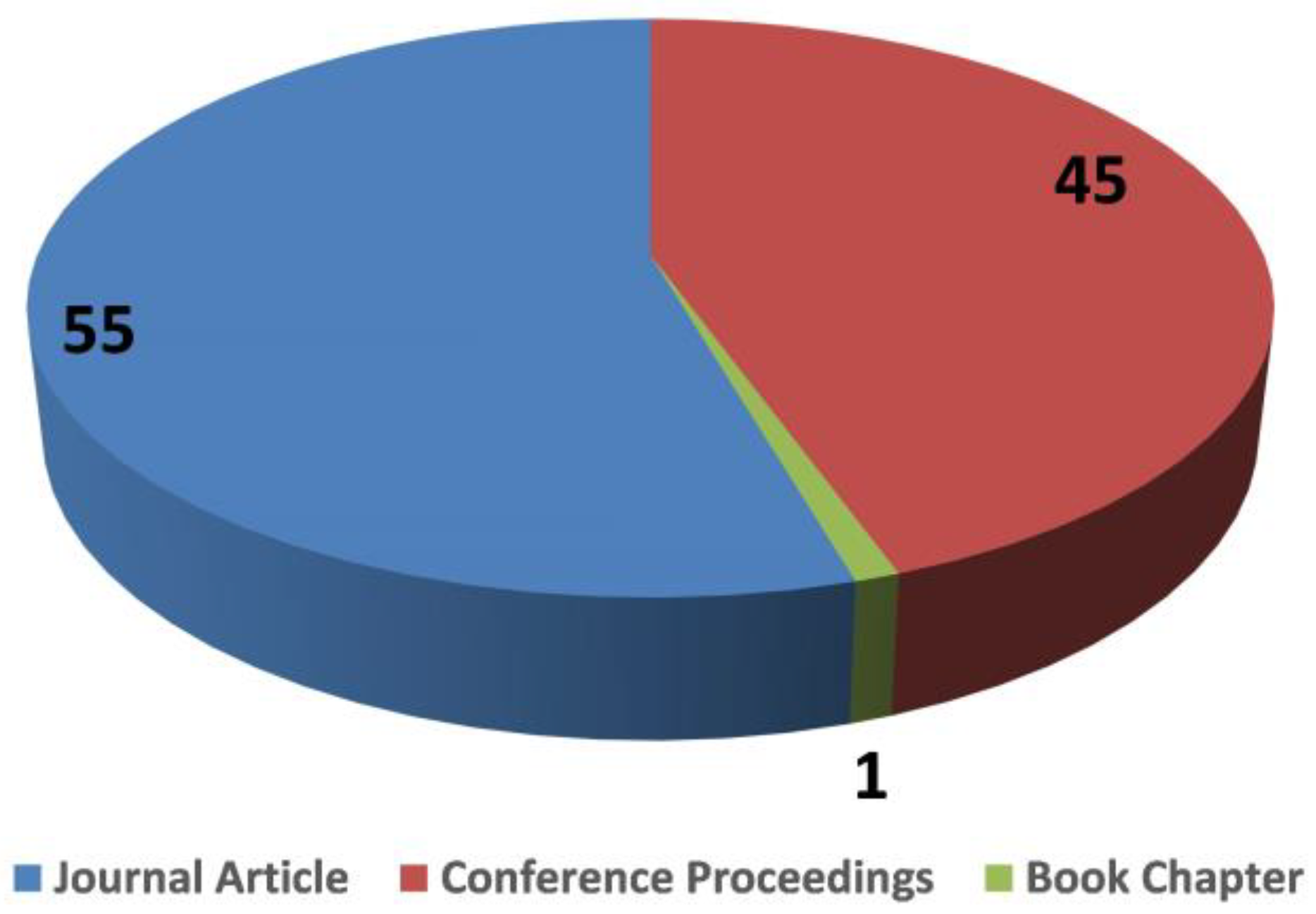

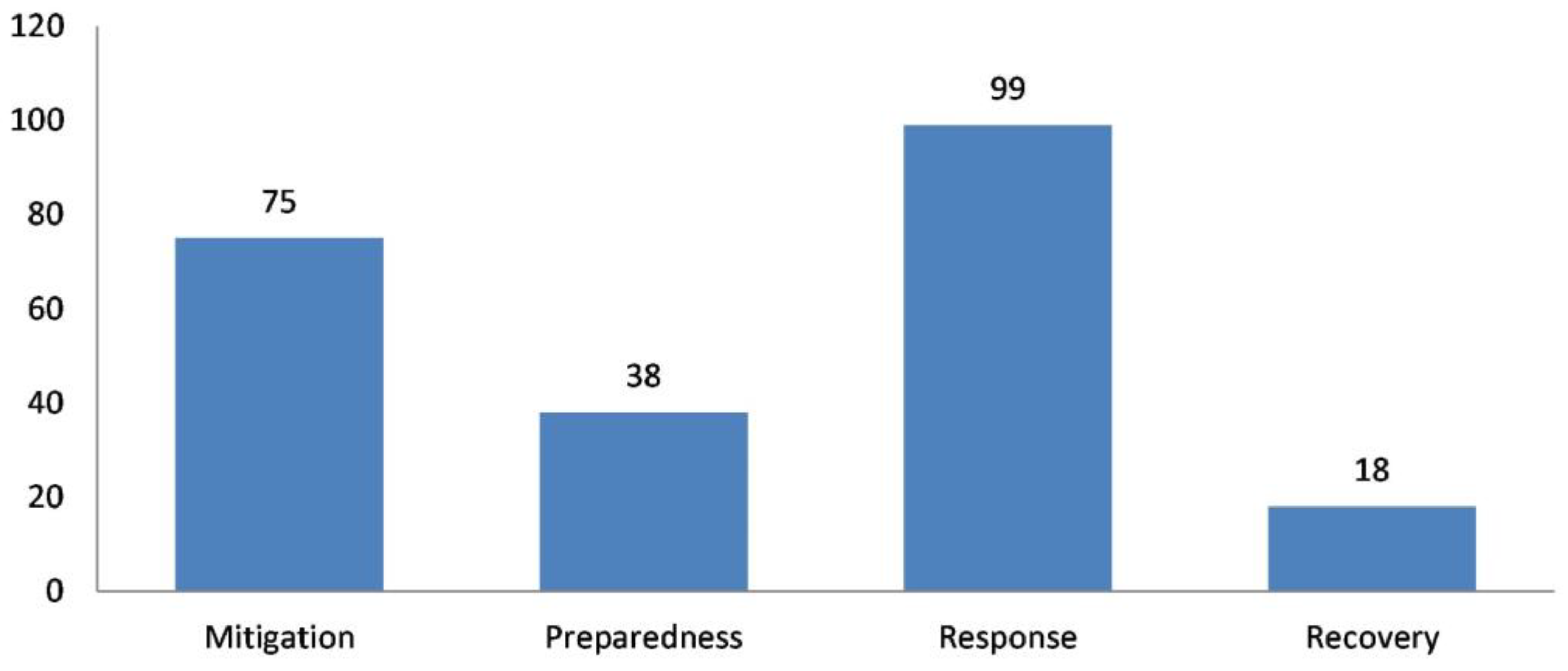
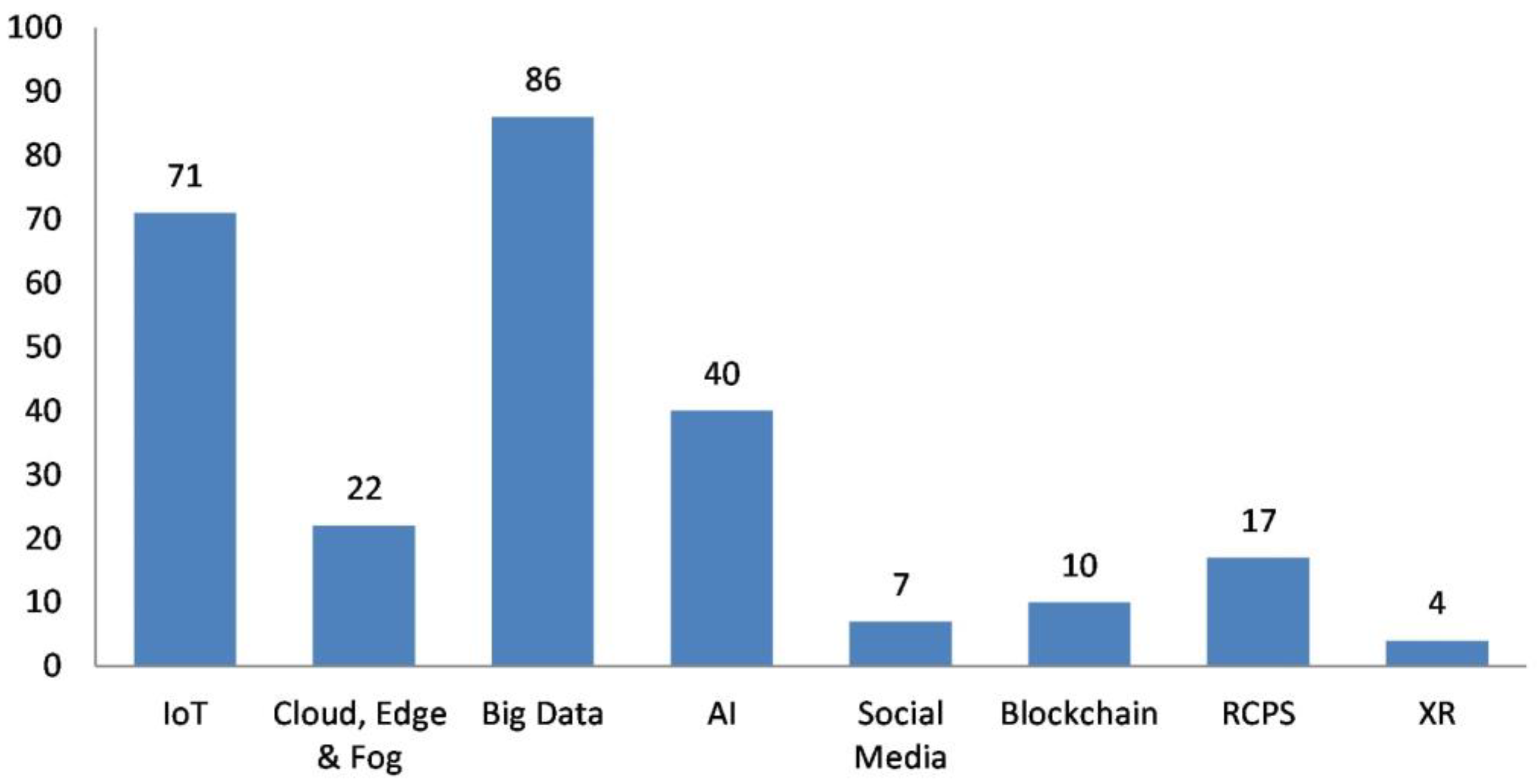
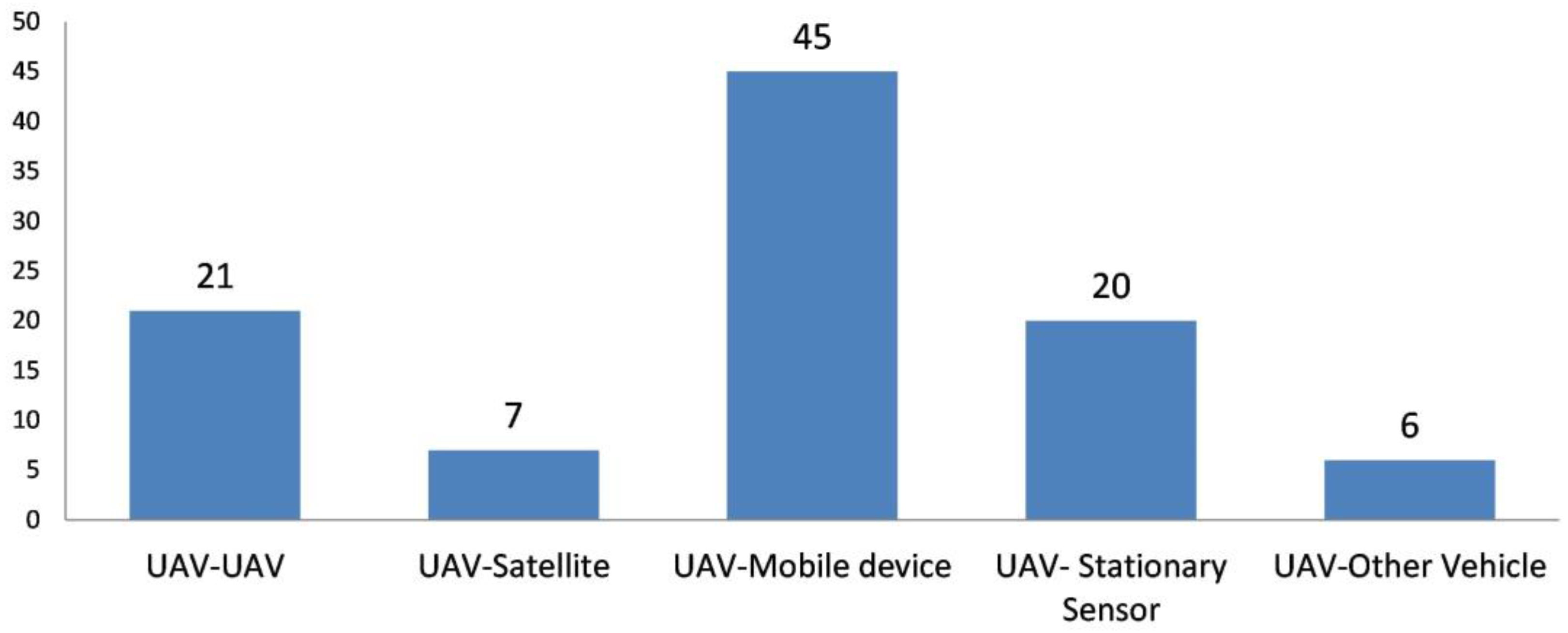
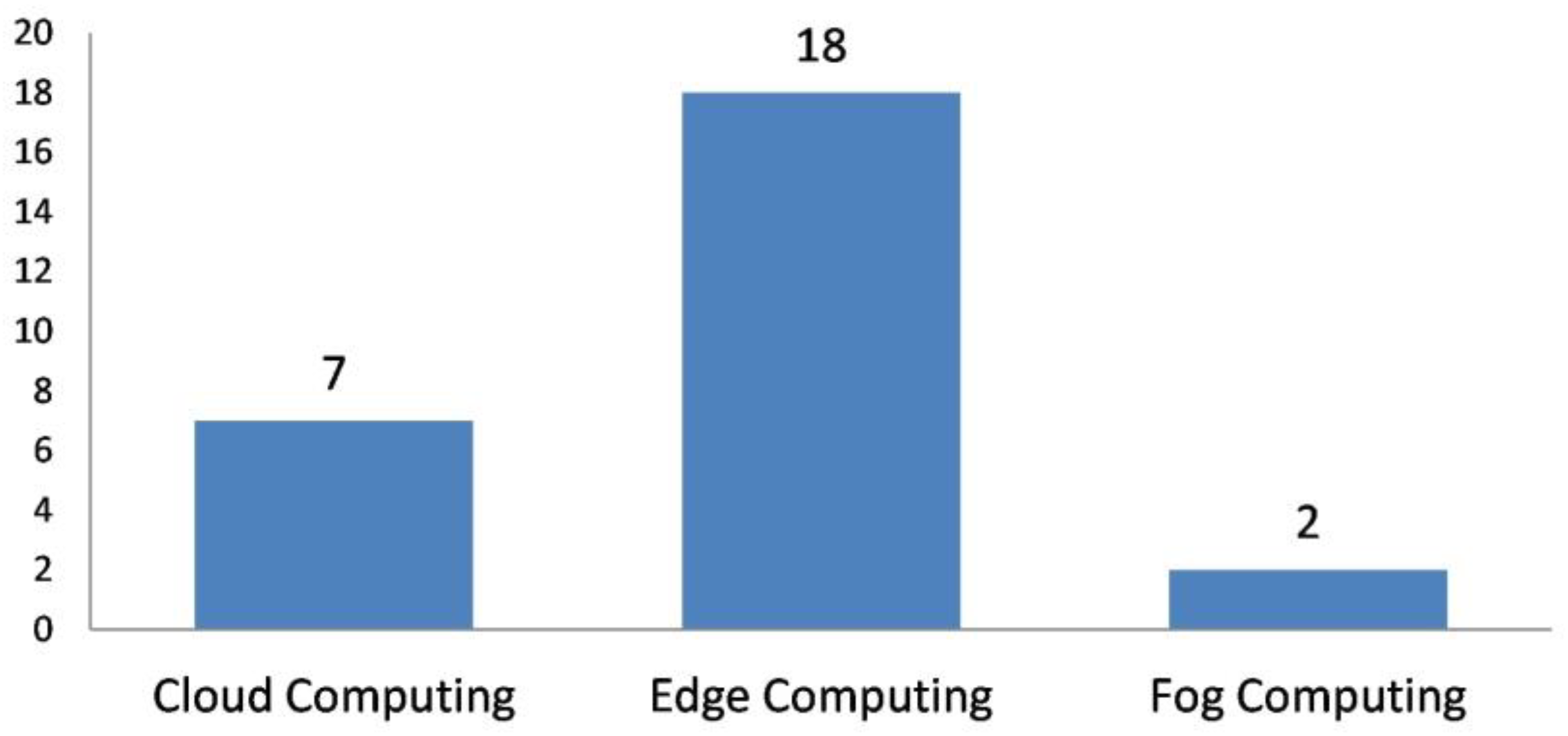

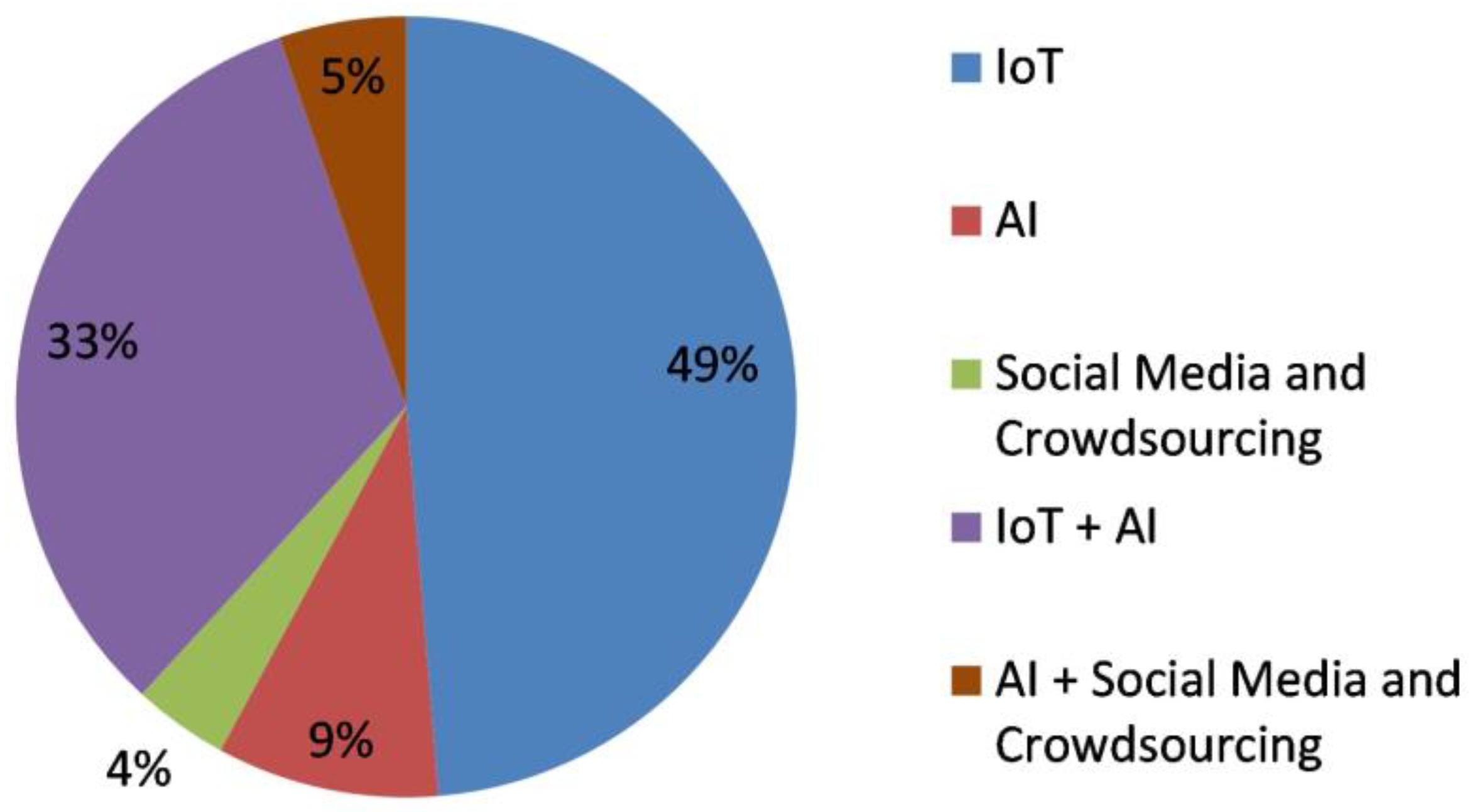
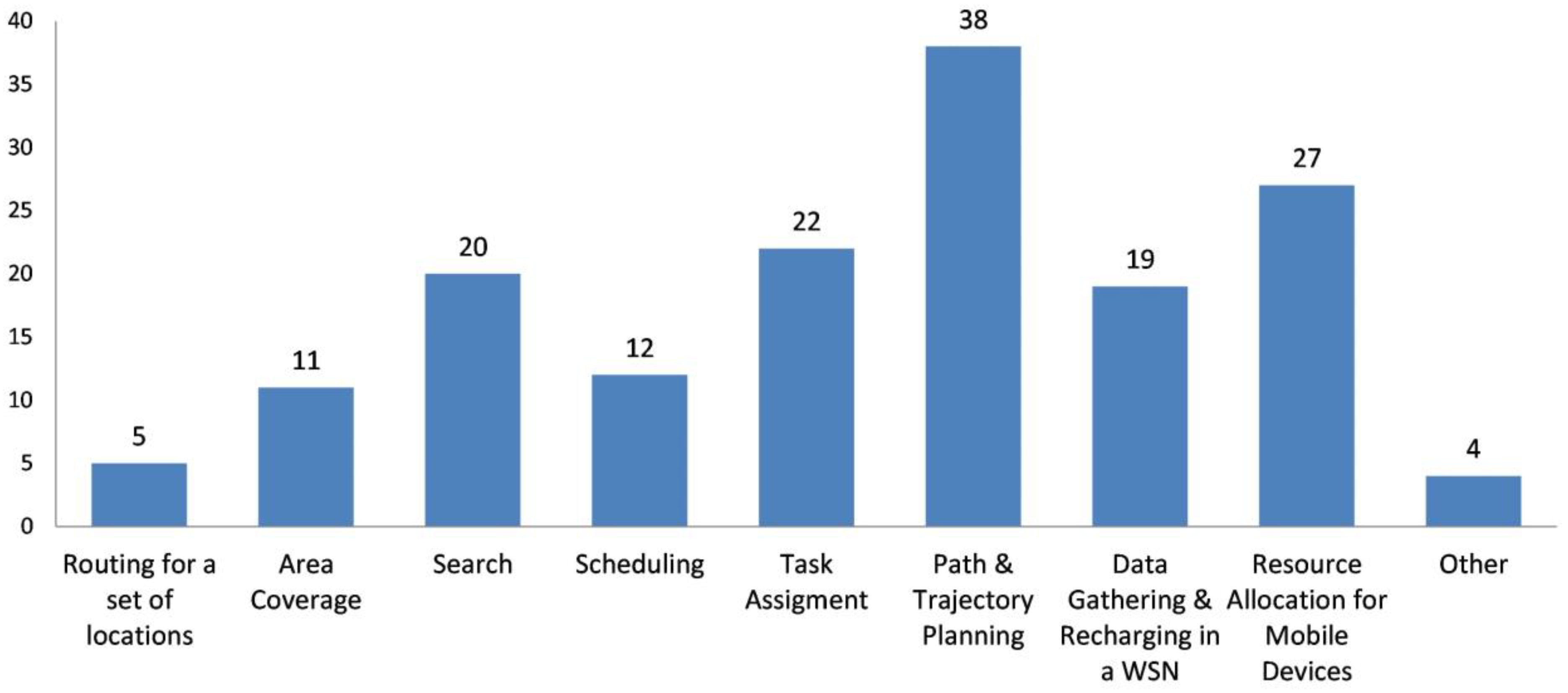
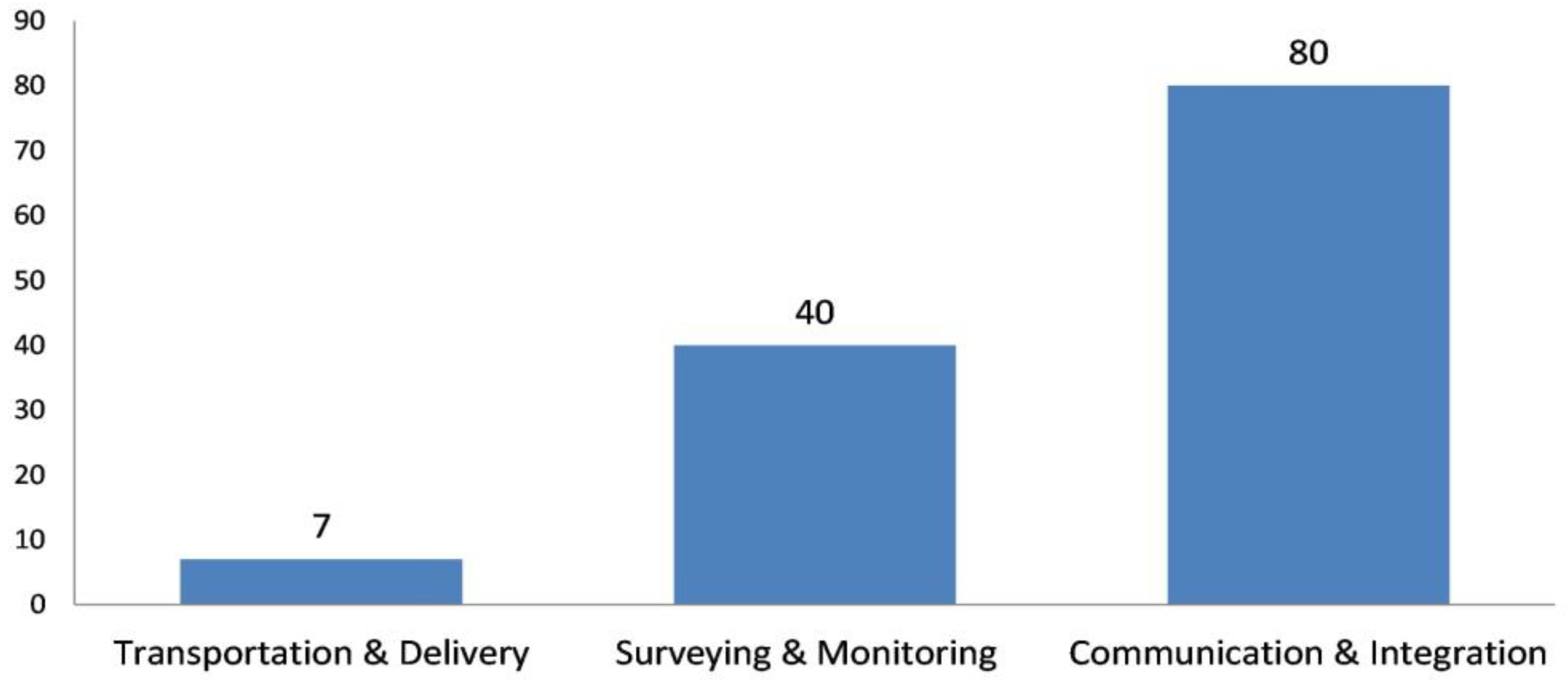

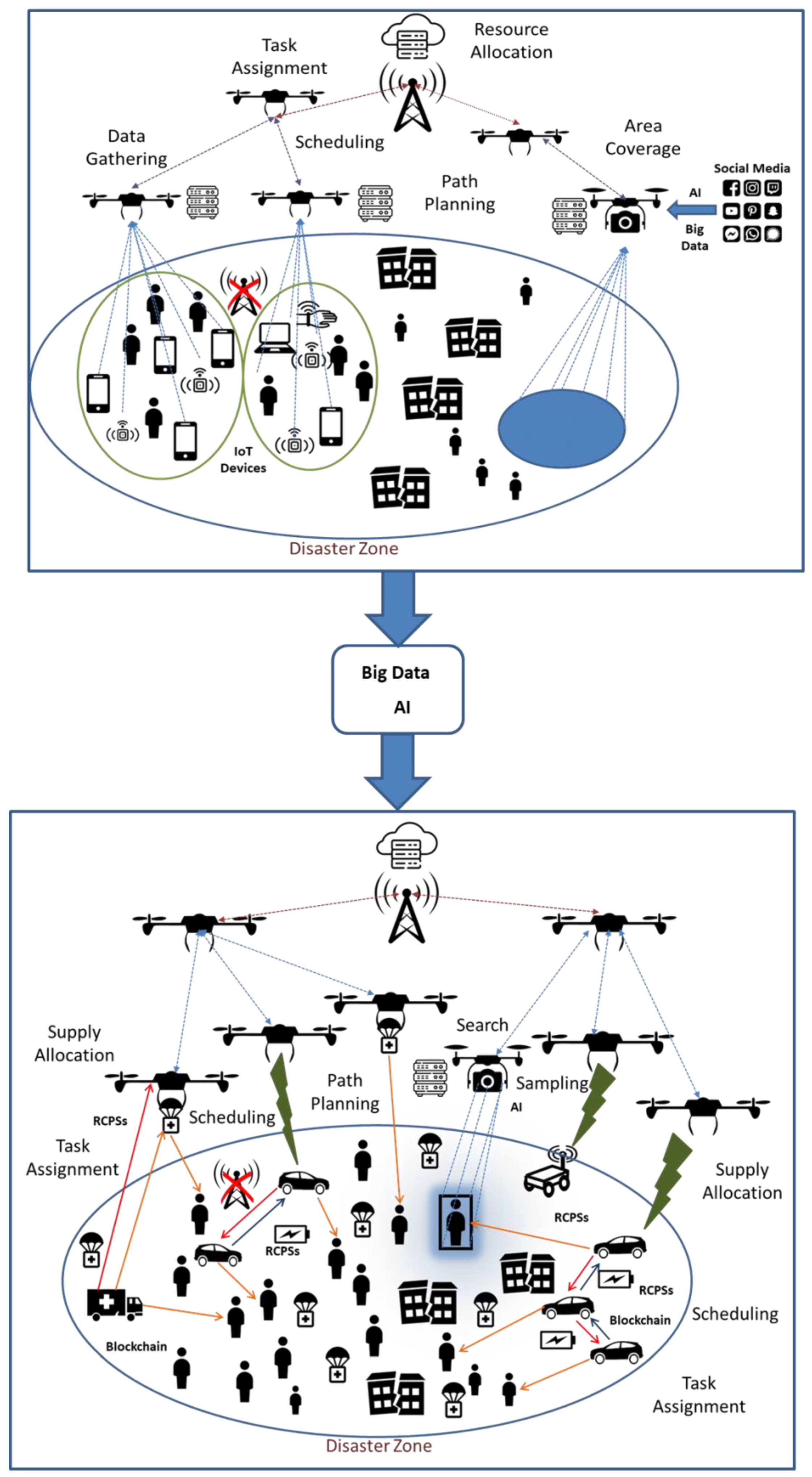
| Publishing Source | # of Papers (n) | % |
|---|---|---|
| IEEE Internet of Things Journal | 8 | 7.92% |
| IEEE Access | 4 | 3.96% |
| IEEE Transactions on Vehicular Technology | 4 | 3.96% |
| IEEE Conference on Computer Communications | 4 | 3.96% |
| Computer Communications (Elsevier) | 3 | 2.97% |
| IEEE International Workshop on Safety, Security, and Rescue Robotics | 3 | 2.97% |
| IEEE Wireless Communications | 2 | 1.98% |
| Wireless Communications and Mobile Computing (Wiley Hindawi) | 2 | 1.98% |
| IEEE Transaction on Network Science and Engineering | 2 | 1.98% |
| IEEE International Conference on Communications Workshops | 2 | 1.98% |
| IEEE Transactions on Industrial Informatics | 2 | 1.98% |
| IEEE Systems | 2 | 1.98% |
| IEEE International Conference on Cloud Networking | 2 | 1.98% |
| Sensors (MDPI) | 2 | 1.98% |
| IEEE International Conference on Distributed Computing in Sensor Systems | 2 | 1.98% |
| Other * | 57 | 56.44% |
| All | 101 | 100% |
| Routing for a Set of Locations | Area Coverage | Search | Scheduling | Task Assignment | Path and Trajectory Planning | Data Gathering and Recharging in a WSN | Resource Allocation for Mobile Devices | Other | |
|---|---|---|---|---|---|---|---|---|---|
| Social media and crowdsourcing | 1 | 1 | 1 | 0 | 6 | 4 | 1 | 0 | 0 |
| IoT | 4 | 3 | 9 | 10 | 13 | 26 | 17 | 27 | 2 |
| Big data analytics | 4 | 10 | 17 | 10 | 18 | 35 | 18 | 27 | 2 |
| AI | 2 | 5 | 5 | 6 | 9 | 19 | 10 | 9 | 1 |
| XR | 0 | 2 | 1 | 0 | 1 | 1 | 0 | 0 | 0 |
| Blockchain | 0 | 0 | 4 | 1 | 2 | 1 | 5 | 1 | 1 |
| RCPS | 1 | 2 | 9 | 2 | 5 | 6 | 4 | 1 | 4 |
| Cloud computing | 0 | 0 | 2 | 1 | 3 | 1 | 1 | 2 | 1 |
| Edge computing | 0 | 0 | 1 | 3 | 10 | 5 | 1 | 7 | 1 |
| Fog computing | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aretoulaki, E.; Ponis, S.T.; Plakas, G. Complementarity, Interoperability, and Level of Integration of Humanitarian Drones with Emerging Digital Technologies: A State-of-the-Art Systematic Literature Review of Mathematical Models. Drones 2023, 7, 301. https://doi.org/10.3390/drones7050301
Aretoulaki E, Ponis ST, Plakas G. Complementarity, Interoperability, and Level of Integration of Humanitarian Drones with Emerging Digital Technologies: A State-of-the-Art Systematic Literature Review of Mathematical Models. Drones. 2023; 7(5):301. https://doi.org/10.3390/drones7050301
Chicago/Turabian StyleAretoulaki, Eleni, Stavros T. Ponis, and George Plakas. 2023. "Complementarity, Interoperability, and Level of Integration of Humanitarian Drones with Emerging Digital Technologies: A State-of-the-Art Systematic Literature Review of Mathematical Models" Drones 7, no. 5: 301. https://doi.org/10.3390/drones7050301
APA StyleAretoulaki, E., Ponis, S. T., & Plakas, G. (2023). Complementarity, Interoperability, and Level of Integration of Humanitarian Drones with Emerging Digital Technologies: A State-of-the-Art Systematic Literature Review of Mathematical Models. Drones, 7(5), 301. https://doi.org/10.3390/drones7050301