
STAR-RIS-UAV-Aided Coordinated Multipoint Cellular System for Multi-User Networks

 ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- A UAV equipped with STAR-RIS (STAR-RIS-UAV)-aided CoMP systems for multiple users is proposed in this paper. ES and MS protocols are considered in the system. To achieve high performance, the STAR-RIS-UAV hovers in the middle of two base stations (BS) in the sky. Then, we optimize the beamforming vector and TARCs matrices to maximize the sum rate. In addition, the transmission power for BS and the QoS of users are considered as constraints.
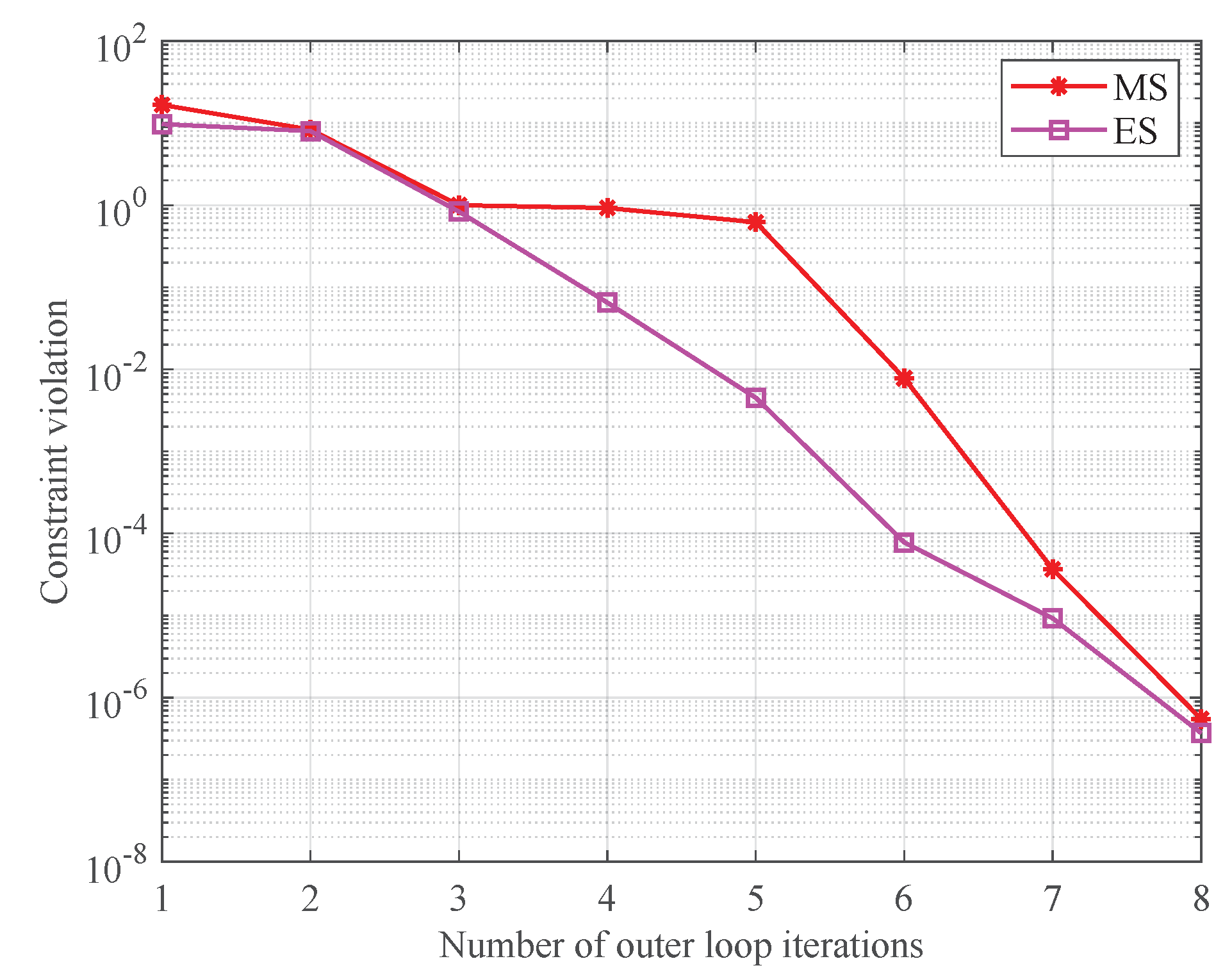
- For the ES protocol, in contrast with conventional alternate optimization, which optimizes one variable every time, the proposed method can optimize all variables in all iterations. Successive convex approximation (SCA) and a penalty function are adopted to create a convex version of this non-convex issue. Then, the optimized results are obtained by updating the penalty factor in subsequent iterations.
- The MS protocol is processed in a manner similar to the ES protocols. The key here is to deal with a binary constraint. We replace this binary constraint with a new penalty function. When the penalty factor increase to infinity, the modified problem is equal to the origin.
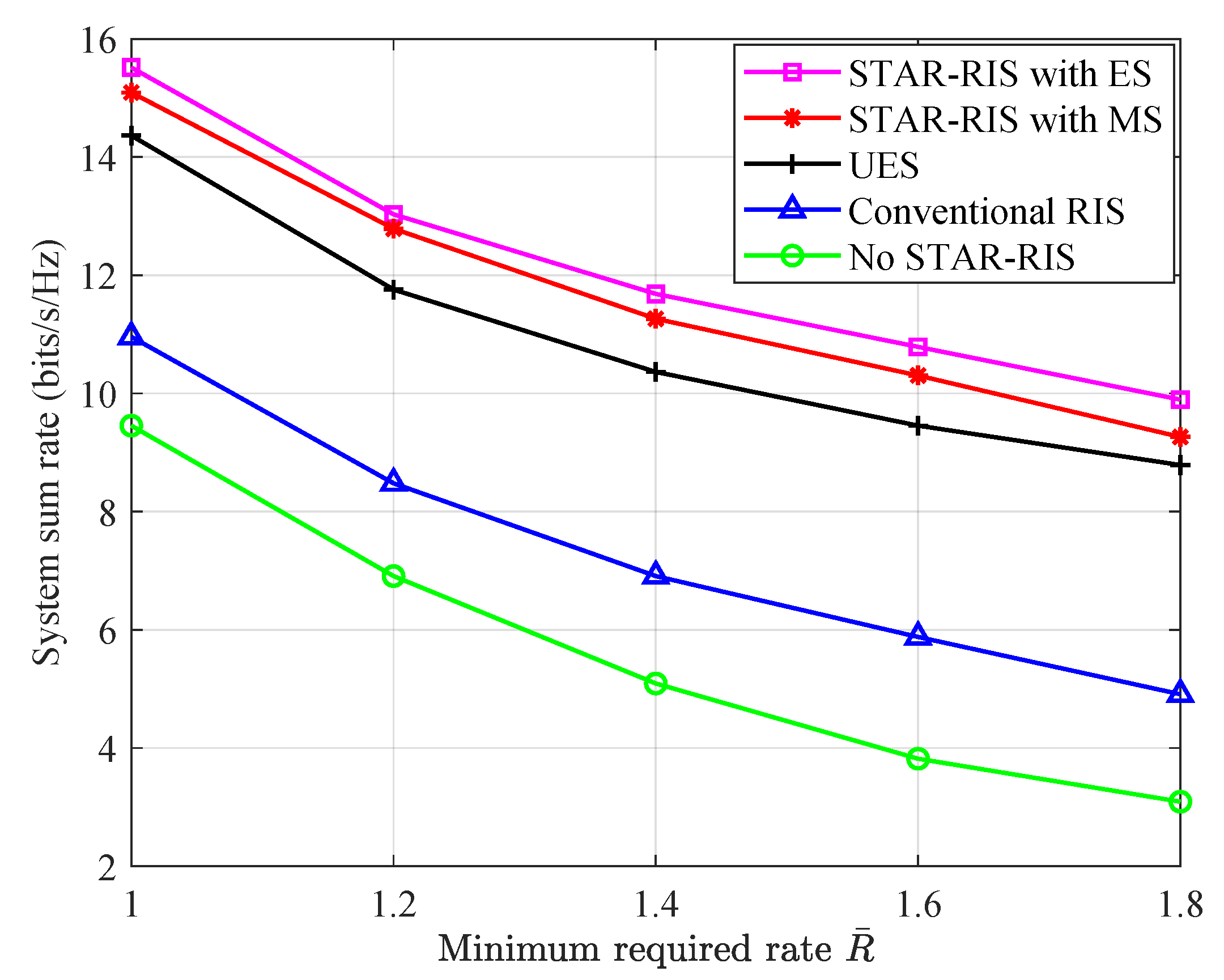
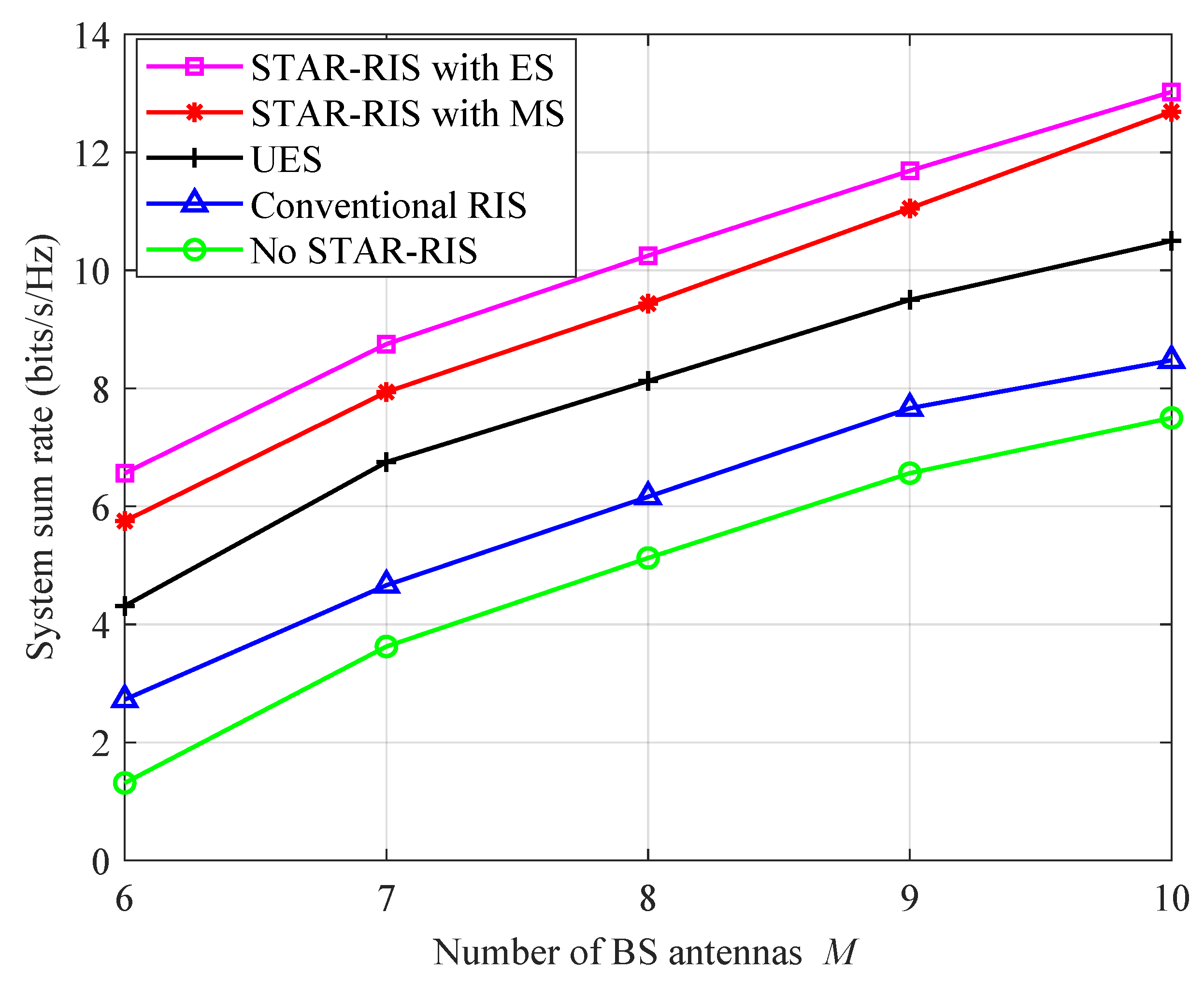
- We evaluate the performance by comparing the system sum rate of proposed methods with three schemes: no RIS, conventional RIS, and uniform energy splitting. Through simulation and analysis, we reveal that the proposed system and methods have the highest system sum rate. In addition, the performance of the ES protocol is better than the MS protocol. However, the MS protocol is more easily implemented.
2. System Model
3. Proposed Iterative Algorithm Employing a Penalty Function
3.1. Joint Design of Beamforming Vector and STAR-RIS Coefficient Matrix for ES Protocol
| Algorithm 1: Proposed penalty-based based iterative method for ES protocol. |
 |
3.2. Joint Design of Beamforming Vector and STAR-RIS Coefficient Matrix for MS Protocol
| Algorithm 2: Proposed penalty-based iterative method for ES protocol. |
 |
4. Computational Complexity
5. Simulation Results and Analysis
- Conventional RIS: Instead of using STAR-RIS, full coverage was achieved by two reflective-only RISs. The two RISs were adjacent to each other and deployed at the same locations. For a fair comparison, it was assumed that each conventional reflection/transmission RIS had elements; this number was set to be even for simplicity.
- Uniform energy splitting (UES): It was assumed that the TARCs of all components of STAR-RIS in ES mode were equal, , , , where , . UES can be viewed as a specific example of STAR-RIS with a group/face amplitude design in ES protocol.
- No STAR-RIS: Without the aid of STAR-RIS, the system becomes a traditional collaborative multi-point transmission communication system.
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 6G | Sixth-generation communication network |
| UAV | Unmanned aerial vehicle |
| RIS | Reconfigurable intelligent surface |
| STAR-RIS | Simultaneous transmitting and reflecting RIS |
| ES | Energy splitting |
| MS | Mode switching |
| TS | Time switching |
| TARC | Transmitted and reflected coefficients |
| CoMP | Coordinated multipoint |
| MIMO | Multiple-input multiple-output |
| 2D | Two dimensional |
| QoS | Quality-of-service |
| LOS | Line-of-sight |
| BS | Base station |
| CEU | Cell edge user |
| CCU | Cell center user |
| SCA | Successive convex approximation |
| SDR | Semi-definite relaxation |
| UES | Uniform energy splitting |
References
- Huang, C.; Zappone, A.; Alexandropoulos, G.C.; Debbah, M.; Yuen, C. Reconfigurable Intelligent Surfaces for Energy Efficiency in Wireless Communication. IEEE Trans. Wirel. Commun. 2019, 18, 4157–4170. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Zhang, R. Towards Smart and Reconfigurable Environment: Intelligent Reflecting Surface Aided Wireless Network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Liu, X.; Mu, X.; Hou, T.; Xu, J.; Di Renzo, M.; Al-Dhahir, N. Reconfigurable Intelligent Surfaces: Principles and Opportunities. IEEE Commun. Surv. Tuts. 2021, 23, 1546–1577. [Google Scholar] [CrossRef]
- Pan, C.; Ren, H.; Wang, K.; Elkashlan, M.; Nallanathan, A.; Wang, J.; Hanzo, L. Intelligent Reflecting Surface Aided MIMO Broadcasting for Simultaneous Wireless Information and Power Transfer. IEEE J. Sel. Areas Commun. 2020, 38, 1719–1734. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Joint Active and Passive Beamforming Optimization for Intelligent Reflecting Surface Assisted SWIPT Under QoS Constraints. IEEE J. Sel. Areas Commun. 2020, 38, 1735–1748. [Google Scholar] [CrossRef]
- Cui, M.; Zhang, G.; Zhang, R. Secure Wireless Communication via Intelligent Reflecting Surface. IEEE Wirel. Commun. Lett. 2019, 8, 1410–1414. [Google Scholar] [CrossRef] [Green Version]
- Shi, W.; Wu, Q.; Xiao, F.; Shu, F.; Wang, J. Secrecy Throughput Maximization for IRS-Aided MIMO Wireless Powered Communication Networks. IEEE Trans. Commun. 2022, 70, 7520–7535. [Google Scholar] [CrossRef]
- Yue, X.; Xie, J.; Liu, Y.; Han, Z.; Liu, R.; Ding, Z. Simultaneously Transmitting and Reflecting Reconfigurable Intelligent Surface Assisted NOMA Networks. IEEE Trans. Wirel. Commun. 2023, 22, 189–204. [Google Scholar] [CrossRef]
- Khaleel, A.; Basar, E. A Novel NOMA Solution with RIS Partitioning. IEEE J. Sel. Topics Signal Process. 2022, 16, 70–81. [Google Scholar] [CrossRef]
- Zhi, K.; Pan, C.; Ren, H.; Wang, K.; Elkashlan, M.; Renzo, M.D.; Schober, R.; Poor, H.V.; Wang, J.; Hanzo, L. Two-Timescale Design for Reconfigurable Intelligent Surface-Aided Massive MIMO Systems with Imperfect CSI. IEEE Trans. Inf. Theory 2023, 69, 3001–3033. [Google Scholar] [CrossRef]
- Ren, H.; Wang, K.; Pan, C. Intelligent Reflecting Surface-Aided URLLC in a Factory Automation Scenario. IEEE Trans. Commun. 2022, 70, 707–723. [Google Scholar] [CrossRef]
- Li, S.; Duo, B.; Yuan, X.; Liang, Y.C.; Di Renzo, M. Reconfigurable Intelligent Surface Assisted UAV Communication: Joint Trajectory Design and Passive Beamforming. IEEE Wirel. Commun. Lett. 2020, 9, 716–720. [Google Scholar] [CrossRef] [Green Version]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Poor, H.V. Intelligent Reflecting Surface Enhanced Multi-UAV NOMA Networks. IEEE J. Sel. Areas Commun. 2021, 39, 3051–3066. [Google Scholar] [CrossRef]
- Ren, H.; Zhang, Z.; Peng, Z.; Li, L.; Pan, C. Energy Minimization in RIS-Assisted UAV-Enabled Wireless Power Transfer Systems. IEEE Internet Things J. 2023, 10, 5794–5809. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Intelligent Reflecting Surface Enhanced Wireless Network via Joint Active and Passive Beamforming. IEEE Trans. Wirel. Commun. 2019, 18, 5394–5409. [Google Scholar] [CrossRef] [Green Version]
- Hong, S.; Pan, C.; Ren, H.; Wang, K.; Nallanathan, A. Artificial-Noise-Aided Secure MIMO Wireless Communications via Intelligent Reflecting Surface. IEEE Trans. Commun. 2020, 68, 7851–7866. [Google Scholar] [CrossRef]
- Shi, W.; Zhou, X.; Jia, L.; Wu, Y.; Shu, F.; Wang, J. Enhanced Secure Wireless Information and Power Transfer via Intelligent Reflecting Surface. IEEE Commun. Lett. 2021, 25, 1084–1088. [Google Scholar] [CrossRef]
- Shu, F.; Teng, Y.; Li, J.; Huang, M.; Shi, W.; Li, J.; Wu, Y.; Wang, J. Enhanced Secrecy Rate Maximization for Directional Modulation Networks via IRS. IEEE Trans. Commun. 2021, 69, 8388–8401. [Google Scholar] [CrossRef]
- Dong, R.; Teng, Y.; Sun, Z.; Zou, J.; Huang, M.; Li, J.; Shu, F.; Wang, J. Performance analysis of wireless network aided by discrete-phase-shifter IRS. J. Commun. Netw. 2022, 24, 603–612. [Google Scholar] [CrossRef]
- Niu, H.; Chu, Z.; Zhou, F.; Xiao, P.; Al-Dhahir, N. Weighted Sum Rate Optimization for STAR-RIS-Assisted MIMO System. IEEE Trans. Veh. Technol. 2022, 71, 2122–2127. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Schober, R. Simultaneously Transmitting and Reflecting (STAR) RIS Aided Wireless Communications. IEEE Trans. Wirel. Commun. 2022, 21, 3083–3098. [Google Scholar] [CrossRef]
- Gao, Q.; Liu, Y.; Mu, X.; Jia, M.; Li, D.; Hanzo, L. Joint Location and Beamforming Design for STAR-RIS Assisted NOMA Systems. IEEE Trans. Commun. 2023, 71, 2532–2546. [Google Scholar] [CrossRef]
- Zhai, X.; Han, G.; Cai, Y.; Liu, Y.; Hanzo, L. Simultaneously Transmitting and Reflecting (STAR) RIS Assisted Over-the-Air Computation Systems. IEEE Trans. Commun. 2023, 71, 1309–1322. [Google Scholar] [CrossRef]
- Irmer, R.; Droste, H.; Marsch, P.; Grieger, M.; Fettweis, G.; Brueck, S.; Mayer, H.P.; Thiele, L.; Jungnickel, V. Coordinated multipoint: Concepts, performance, and field trial results. IEEE Commun. Mag. 2011, 49, 102–111. [Google Scholar] [CrossRef] [Green Version]
- Hua, M.; Wu, Q.; Ng, D.W.K.; Zhao, J.; Yang, L. Intelligent Reflecting Surface-Aided Joint Processing Coordinated Multipoint Transmission. IEEE Trans. Commun. 2021, 69, 1650–1665. [Google Scholar] [CrossRef]
- Xie, H.; Xu, J.; Liu, Y.F. Max-Min Fairness in IRS-Aided Multi-Cell MISO Systems With Joint Transmit and Reflective Beamforming. IEEE Trans. Wirel. Commun. 2021, 20, 1379–1393. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S.; Ye, Y. CVX: Matlab Software for Disciplined Convex Programming, Version 2.0 Beta. Available online: http://cvxr.com/cvx (accessed on 25 May 2023).



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, B.; Wang, Y.; Li, D.; Cai, W.; Lin, J.; Zhang, S.; Shi, W.; Yan , S.; Shu, F. STAR-RIS-UAV-Aided Coordinated Multipoint Cellular System for Multi-User Networks. Drones 2023, 7, 403. https://doi.org/10.3390/drones7060403
Shi B, Wang Y, Li D, Cai W, Lin J, Zhang S, Shi W, Yan S, Shu F. STAR-RIS-UAV-Aided Coordinated Multipoint Cellular System for Multi-User Networks. Drones. 2023; 7(6):403. https://doi.org/10.3390/drones7060403
Chicago/Turabian StyleShi, Baihua, Yang Wang, Danqi Li, Wenlong Cai, Jinyong Lin, Shuo Zhang, Weiping Shi, Shihao Yan , and Feng Shu. 2023. "STAR-RIS-UAV-Aided Coordinated Multipoint Cellular System for Multi-User Networks" Drones 7, no. 6: 403. https://doi.org/10.3390/drones7060403
APA StyleShi, B., Wang, Y., Li, D., Cai, W., Lin, J., Zhang, S., Shi, W., Yan , S., & Shu, F. (2023). STAR-RIS-UAV-Aided Coordinated Multipoint Cellular System for Multi-User Networks. Drones, 7(6), 403. https://doi.org/10.3390/drones7060403