





Addressing Constraint Coupling and Autonomous Decision-Making Challenges: An Analysis of Large-Scale UAV Trajectory-Planning Techniques

Abstract
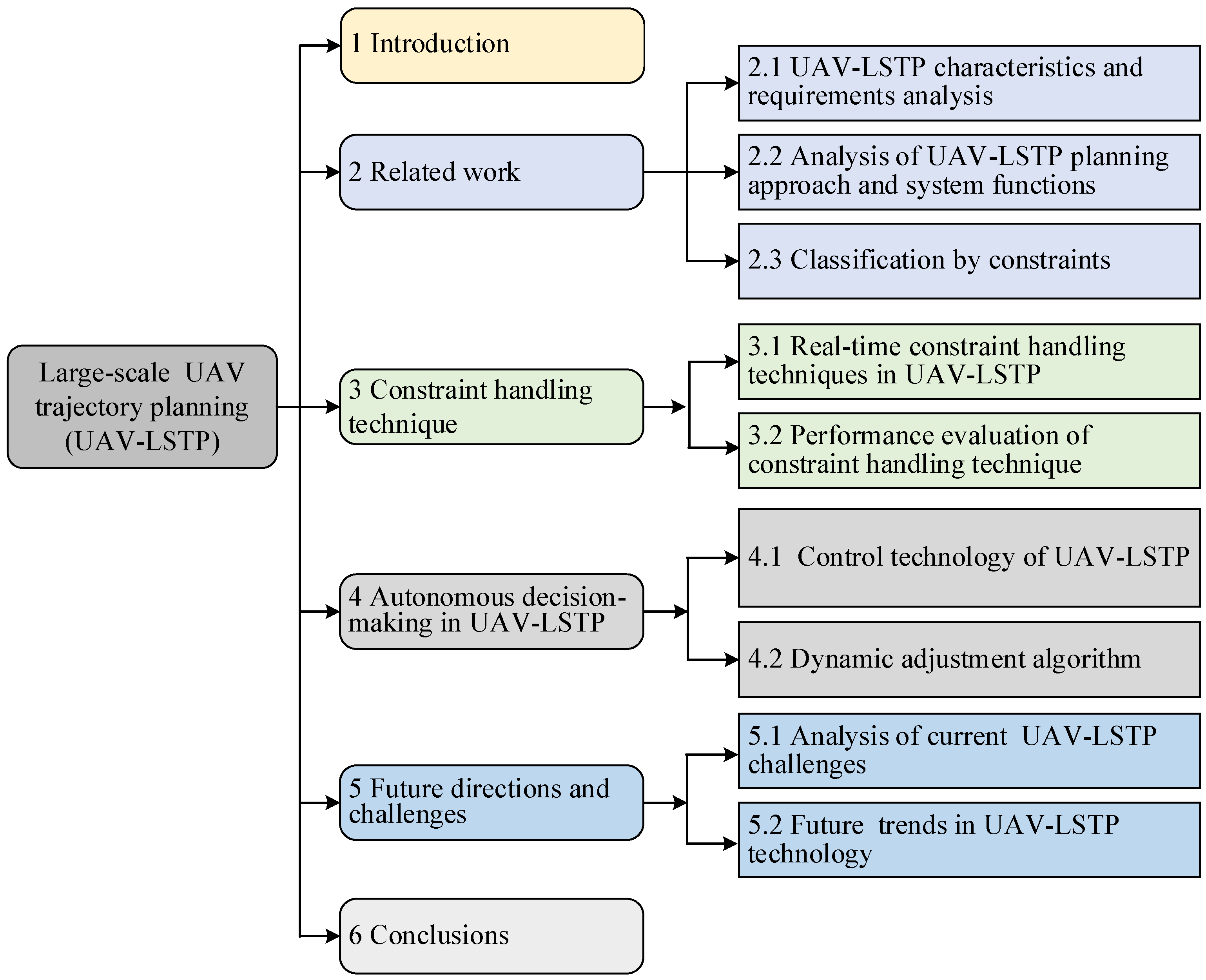
1. Introduction
- In terms of UAV-LSTP classification: This paper proposes a new multi-dimensional classification method, which combines different planning approaches, realization functions and constraints to systematically classify UAV-LSTP. Incorporating constraints into the planning system analysis framework enhances the comprehensiveness and applicability of the classification method. The classification method is applicable to a wide range of environmental scenarios, which provides a basis for researchers to design more targeted optimization algorithms and planning schemes and enhances the flexibility and adaptability of the planning system.
- In terms of constraint handling techniques: this paper summarizes in detail the existing redundant constraint identification and streamlining algorithms, constraint prioritization techniques, as well as constraint fusion and conversion methods. By classifying and analyzing the performance of these techniques, it can improve the planning efficiency of the planning system and effectively reduce the redundancy and conflict of the trajectory planning scheme during the UAV-LSTP planning process, which provides a comprehensive basis for researchers to select and compare the constraint handling techniques.
- In terms of performance assessment of constraint handling techniques: This paper establishes a set of UAV-LSTP constraint handling technique assessment system, which covers the key indexes of constraint handling capability, computational efficiency, robustness and stability, and flexibility and adaptability. The system provides detailed assessment criteria to ensure the feasibility and performance reliability of constraint handling technology in practical applications. Through this evaluation system, researchers and scholars are able to measure and compare different constraint handling techniques more effectively.
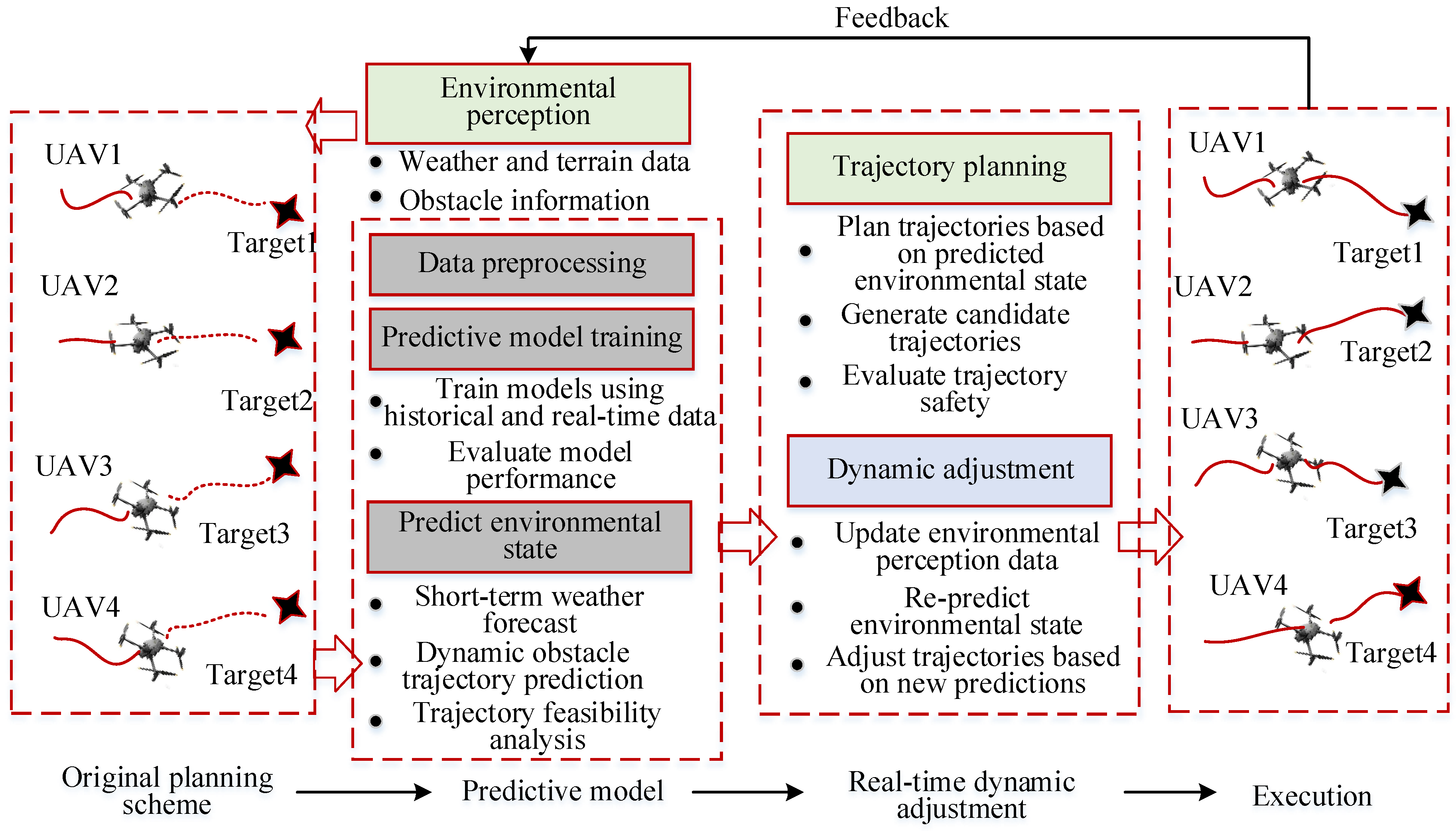
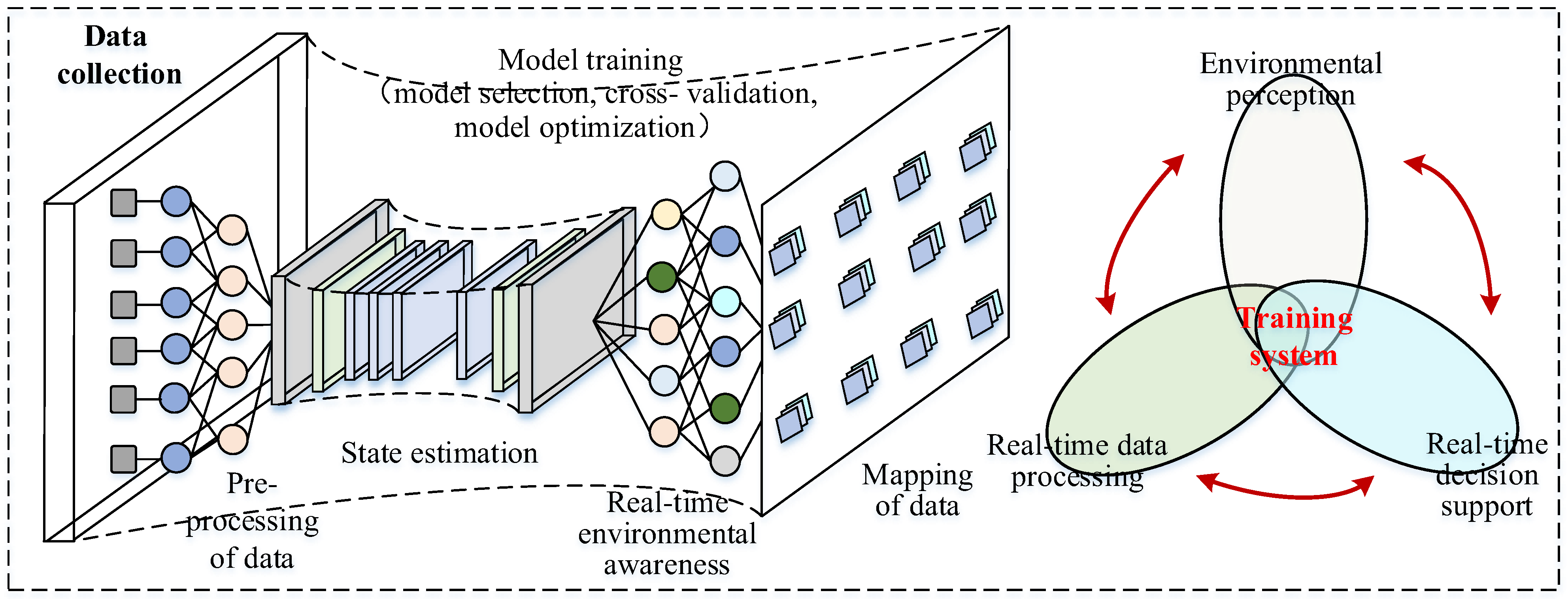
- In terms of autonomous decision-making for UAV-LSTP: This paper explores the importance of autonomous decision-making in the planning process of UAV-LSTP, especially in dynamically changing mission environments. Autonomous decision-making mechanisms combining predictive modelling, environment awareness, adaptive control and machine learning algorithms are proposed to enable UAVs to adjust their planning schemes in real time under complex environments. By analyzing these techniques, this paper points out the importance of autonomous decision-making in enhancing mission adaptability and improving mission execution efficiency.
2. Related Work
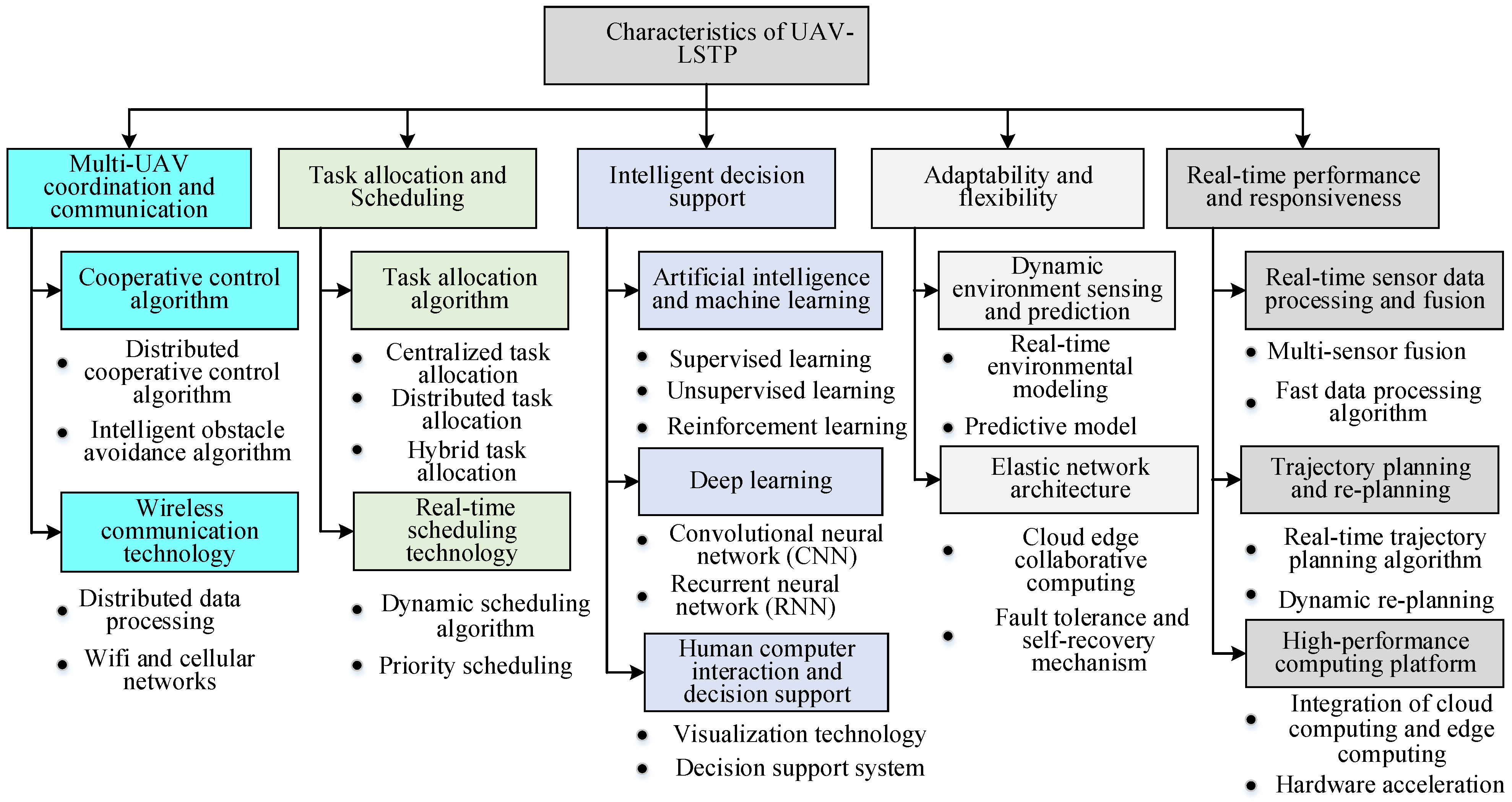
2.1. UAV-LSTP Characteristics and Requirements Analysis
2.1.1. Characteristics of UAV-LSTP
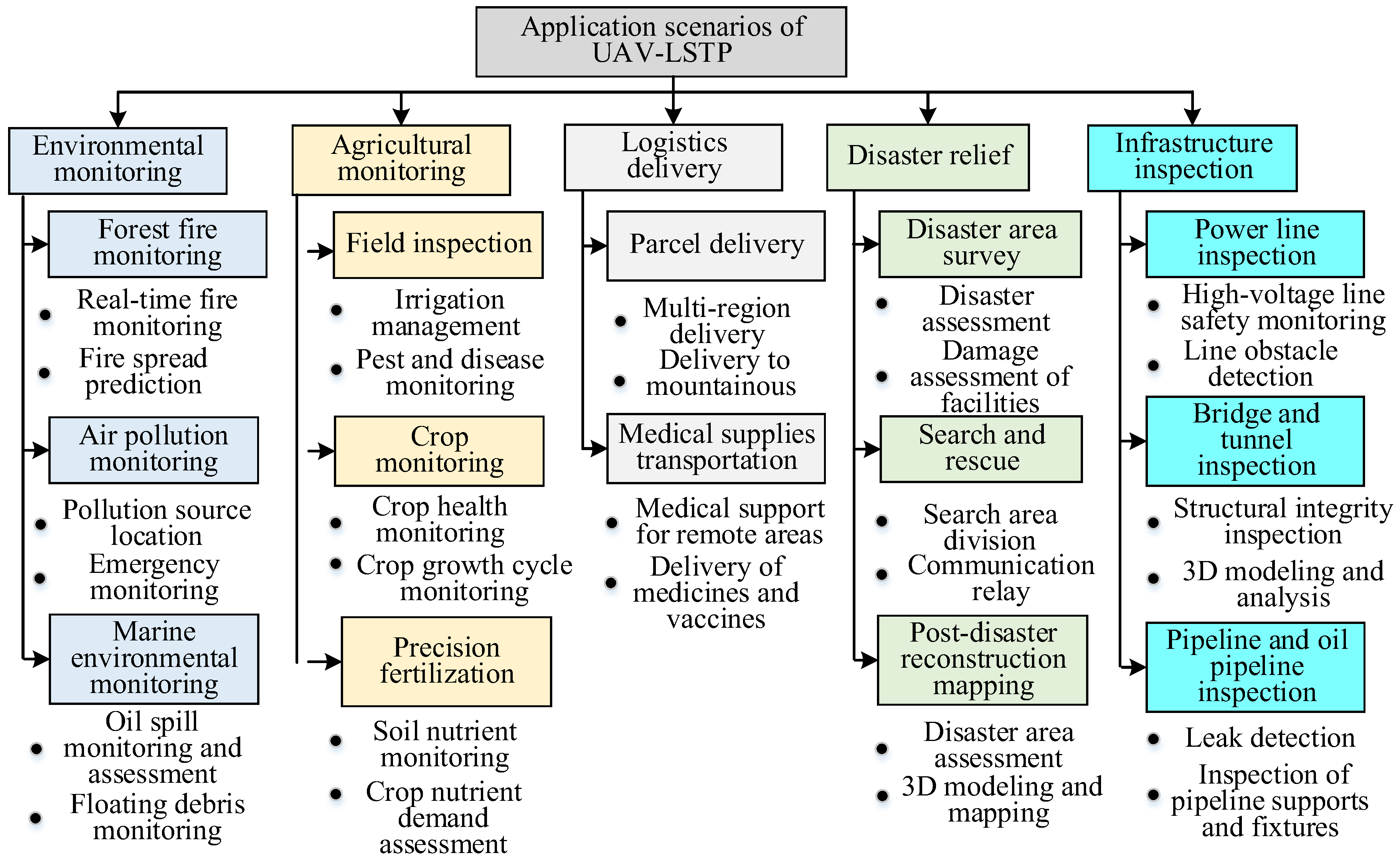
2.1.2. Typical Application Scenarios and Requirements Analysis
2.2. Analysis of UAV-LSTP Planning Approach and System Functions
2.2.1. Classification by Planning Method
- 1.
- Global planning method
- 2.
- Local planning method
- 3.
- Trajectory tracking
2.2.2. Analysis of System Functions
- 1.
- Offline Static Trajectory Planning
- 2.
- Online Dynamic Real-Time Trajectory Planning
- 3.
- Unconstrained and constrained trajectory planning
2.3. Classification by Constraints
2.3.1. Strong Constraints
2.3.2. Weak Constraints
3. Constraint Handling Technique
3.1. Real-Time Constraint Handling Techniques in UAV-LSTP
3.1.1. Redundant Constraint Identification and Simplification
- 1.
- Redundant constraint identification
- 2.
- Constraint set simplification
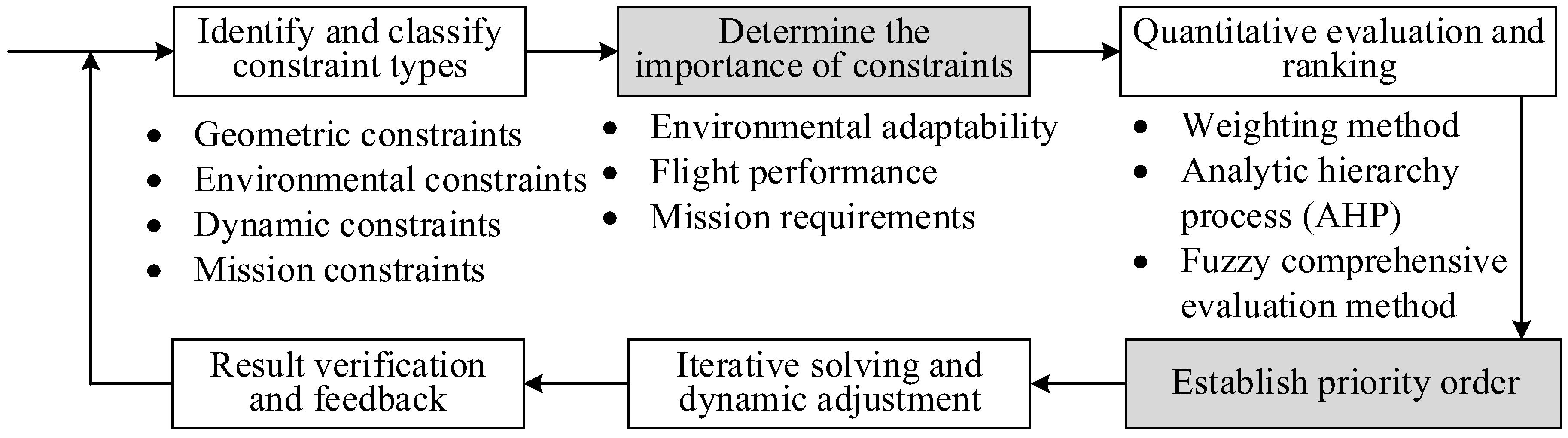
3.1.2. Constraint Prioritization
- 1.
- Determining constraint types and classification
- Geometric constraints: obstacle avoidance constraints, trajectory smoothing constraints, etc.
- Dynamic constraints: maximum speed, acceleration, turning radius, etc.
- Mission constraints: mission waypoint sequencing, flight time limits, etc.
- Environmental constraints: weather conditions, no-fly zones, etc.
- 2.
- Determining constraint importance
- Safety: constraints ensuring flight safety (e.g., obstacle avoidance and no-fly zone constraints) typically have the highest priority.
- Mission requirements: constraints directly related to mission completion (e.g., waypoint sequencing and time limits) follow in priority.
- Flight performance: constraints affecting flight performance (e.g., speed and acceleration limits) are given higher priority.
- Environmental adaptation: constraints requiring adaptation to environmental changes (e.g., weather conditions) have slightly lower priority.
- 3.
- Quantitative evaluation and ranking
- Weight method: assign a weight to each constraint, reflecting its importance; the sum of the weights equals 1.
- Analytic hierarchy process (AHP): compare constraints by constructing judgment matrices to compute the relative weights for each constraint.
- Fuzzy comprehensive evaluation method: use fuzzy logic to evaluate constraints fuzzily and calculate comprehensive scores.
- 4.
- Determining priority order
- 5.
- Dynamic adjustment and optimization
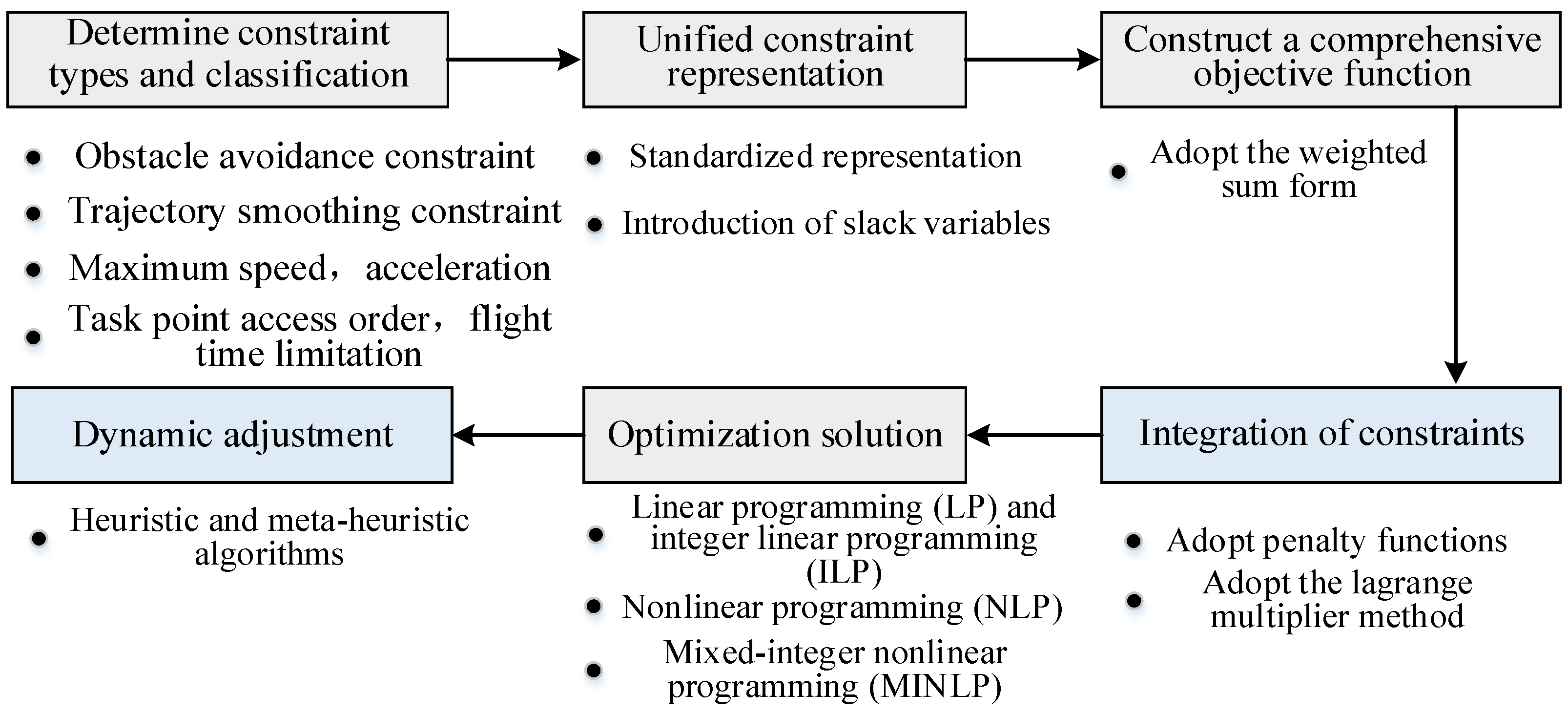
3.1.3. Constraint Fusion and Transformation
- 1.
- Uniform constraint representation
- Standardized representation: converts all constraints into standard linear or nonlinear inequalities or forms of equations.
- Relaxation variable introduction: for strict constraints, introduces relaxation variables and converts them into a more manageable form.
- 2.
- Construct a comprehensive objective function
- 3.
- Convergence of constraints
- Penalty function method:
- Lagrange multiplier method: the Lagrange multiplier is introduced to add constraints directly to the objective function.
- 4.
- Optimize the solution
- Linear programming (LP) and integer linear programming (ILP): for linear constraints and objective functions.
- Nonlinear programming (NLP): applicable to nonlinear constraints and objective functions.
- Mixed-integer nonlinear programming (MINLP): deals with complex constraint problems with both discrete decision variables and continuous variables.
- Heuristics and meta-heuristics: includes the genetic algorithm (GA), particle swarm optimization (PSO), and simulated annealing (SA), which are suitable for complex and multi-objective optimization problems.
3.2. Performance Evaluation of Constraint Handling Technique
- Constraint handling capability: The performance of constraint handling techniques should be evaluated under various coupled constraint conditions through simulations of different mission environments. This involves setting up complex obstacle layouts to test the effectiveness of constraint handling, assessing UAV flight smoothness through trajectory smoothing, and evaluating UAV-LSTP efficiency under time constraints by limiting flight time. Additionally, it is essential to assess the performance of constraint handling techniques in dynamically adjusting constraint priorities, especially their adaptability to environmental changes. These techniques should be able to adjust the priorities of different constraints rapidly based on real-time environmental information to ensure that the UAVs can execute missions safely and efficiently in complex and changing environments. Evaluating the capability of adjusting constraint priorities ensures the overall performance and reliability of UAV-LSTP.
- Computational efficiency: The computational efficiency of constraint handling techniques in UAV-LSTP should be evaluated, especially their performance in handling large numbers of constraints and dynamic adjustments. In simulations of large-scale mission tests, planning systems need to rapidly process complex constraint combinations and perform dynamic adjustments to meet mission requirements and environmental changes. Simultaneously, it is necessary to assess the resources required by constraint handling techniques during the computation process, including the computational power and storage space. Recording resource usage under different task scales and complexities helps to determine their feasibility and cost-effectiveness in UAV-LSTP. Evaluating computational efficiency contributes to optimizing algorithms to maintain high computational performance while minimizing resource consumption.
- Robustness and stability: The robustness of constraint handling techniques in different environments should be evaluated, including their ability to handle uncertainties, noise, and system failures [95]. This requires planning systems to not only obtain optimal trajectory planning solutions under ideal conditions but also to quickly adjust constraint conditions when faced with unexpected situations. Additionally, it is essential to ensure the stability of UAV-LSTP over prolonged operation periods, preventing system crashes due to frequent adjustments in constraint handling techniques.
- Flexibility and adaptability: The adaptability of constraint handling techniques in various mission requirements and flight scenarios should be evaluated, including adjustments in constraint handling techniques, which are crucial for assessing the flexibility of UAV-LSTP solutions. This can be achieved by simulating diverse mission requirements to test the performance of constraint handling techniques when dealing with different types of tasks. Additionally, constraint handling techniques need the capability to dynamically adjust resource allocation based on task priorities in order to respond to real-time changes and unexpected situations. Through these comprehensive tests, the flexibility and adaptability of the technology in practical applications can be fully evaluated, ensuring its efficient and reliable task completion in dynamic environments. These tests provide a comprehensive understanding of the technology’s adaptability and robustness in different environments, ensuring its effective operation in the varied practical applications of UAV-LSTP.
4. Autonomous Decision-Making in UAV-LSTP
4.1. Control Technology of UAV-LSTP
4.2. Dynamic Adjustment Algorithm
4.2.1. Predictive Modelling and Adaptive Optimal Control
4.2.2. Environment Awareness and Multi-Level Adaptive Control
4.2.3. Machine Learning and Autonomous Decision Making
5. Future Directions and Challenges
5.1. Analysis of Current UAV-LSTP Challenges
5.1.1. UAV-LSTP Computational Load
5.1.2. Complexity of UAV-LSTP Communication Technology
5.2. Future Trends in UAV-LSTP Technology
5.2.1. UAV-LSTP Joint Task Allocation and Trajectory Planning for Task Diversification
5.2.2. UAV-LSTP Integration of 3D Technology for Modelling Complex Environments
5.2.3. UAV-LSTP Combining Satellite and Edge Computing for Global Communication and Response Optimization
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Huang, H.; Wen, X.; Niu, M.; Miah, M.S.; Gao, T.; Wang, H. Multi-UAVs Assisted Path Planning Method for Terrain-Oriented Air-Ground Collaborative Vehicular Network Architecture. IEEE Trans. Intell. Veh. 2024, 34, 1–11. [Google Scholar] [CrossRef]
- Chen, J.; Du, C.; Zhang, Y.; Han, P.; Wei, W. A Clustering-Based Coverage Path Planning Method for Autonomous Heterogeneous UAVs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 25546–25556. [Google Scholar] [CrossRef]
- Mostafa, A.F.; Abdel-Kader, M.; Gadallah, Y. A UAV-Based Coverage Gap Detection and Resolution in Cellular Networks: A Machine-Learning Approach. Comput. Commun. 2024, 215, 41–50. [Google Scholar] [CrossRef]
- Luo, J.; Tang, L.; Chen, Q.; Zhang, Z. Trajectory Design and Bandwidth Allocation Considering Power-Consumption Outage for UAV Communication: A Machine Learning Approach. IEEE Trans. Ind. Inform. 2024, 20, 2519–2528. [Google Scholar] [CrossRef]
- Santana, D.C.; Theodoro, G.F.; Gava, R.; de Oliveira, J.L.G.; Teodoro, L.P.R.; de Oliveira, I.C.; Baio, F.H.R.; da Silva Junior, C.A.; de Oliveira, J.T.; Teodoro, P.E. A New Approach to Identifying Sorghum Hybrids Using UAV Imagery Using Multispectral Signature and Machine Learning. Algorithms 2024, 17, 23. [Google Scholar] [CrossRef]
- Boubeta-Puig, J.; Moguel, E.; Sanchez-Figueroa, F.; Hernandez, J.; Carlos Preciado, J. An Autonomous UAV Architecture for Remote Sensing and Intelligent Decision-Making. IEEE Internet Comput. 2018, 22, 6–15. [Google Scholar] [CrossRef]
- Senthilnath, J.; Harikumar, K.; Sundaram, S. Metacognitive Decision-Making Framework for Multi-UAV Target Search Without Communication. IEEE Trans. Syst. Man. Cybern. Syst. 2024, 54, 3195–3206. [Google Scholar] [CrossRef]
- Lee, B.; Marcum, A.C.; Love, D.J.; Krogmeier, J.V. Fusing Channel and Sensor Measurements for Enhancing Predictive Beamforming in UAV-Assisted Massive MIMO Communications. IEEE Wirel. Commun. Lett. 2024, 13, 869–873. [Google Scholar] [CrossRef]
- Freitas, E.J.R.; Cohen, M.W.; Neto, A.A.; Guimarães, F.G.; Pimenta, L.C.A. DE3D-NURBS: A Differential Evolution-Based 3D Path-Planner Integrating Kinematic Constraints and Obstacle Avoidance. Knowl. -Based Syst. 2024, 300, 112084. [Google Scholar] [CrossRef]
- Zhang, Q.; Chen, X.; Xu, D. Adaptive Neural Fault-Tolerant Control for the Yaw Control of UAV Helicopters with Input Saturation and Full-State Constraints. Appl. Sci. 2020, 10, 1404. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, C.; Yuan, Y.; Cui, J.; Qi, L. A Novel Multi-Objective Evolutionary Algorithm with a Two-Fold Constraint-Handling Mechanism for Multiple UAV Path Planning. Expert Syst. Appl. 2024, 238, 121862. [Google Scholar] [CrossRef]
- Zhou, X.; Tang, Z.; Wang, N.; Yang, C.; Huang, T. A Novel State Transition Algorithm with Adaptive Fuzzy Penalty for Multi-Constraint UAV Path Planning. Expert Syst. Appl. 2024, 248, 123481. [Google Scholar] [CrossRef]
- Yan, F.; Chu, J.; Hu, J.; Zhu, X. Cooperative Task Allocation with Simultaneous Arrival and Resource Constraint for Multi-UAV Using a Genetic Algorithm. Expert Syst. Appl. 2024, 245, 123023. [Google Scholar] [CrossRef]
- Wang, J.; Na, Z.; Liu, X. Collaborative Design of Multi-UAV Trajectory and Resource Scheduling for 6G-Enabled Internet of Things. IEEE Internet Things J. 2021, 8, 15096–15106. [Google Scholar] [CrossRef]
- Thelasingha, N.; Julius, A.A.; Humann, J.; Reddinger, J.-P.; Dotterweich, J.; Childers, M. Iterative Planning for Multi-Agent Systems: An Application in Energy-Aware UAV-UGV Cooperative Task Site Assignments. IEEE Trans. Autom. Sci. Eng. 2024, 8, 1–19. [Google Scholar] [CrossRef]
- Ma, S.; Zhao, B.; Zhang, L.; Yang, X.; Hou, Z.; Zhao, X. Correlation Filter Based on Trajectory Correction and Context Interference Suppression for Real-Time UAV Tracking. IEEE Trans. Intell. Veh. 2024, 8, 1–13. [Google Scholar] [CrossRef]
- Meng, K.; He, X.; Wu, Q.; Li, D. Multi-UAV Collaborative Sensing and Communication: Joint Task Allocation and Power Optimization. IEEE Trans. Wirel. Commun. 2023, 22, 4232–4246. [Google Scholar] [CrossRef]
- Qi, X.; Chong, J.; Zhang, Q.; Yang, Z. Toward Cooperatively Caching in Multi-UAV-Assisted Network: A Queue-Aware CDS-Based Reinforcement Learning Mechanism with Energy-Efficiency Maximization. IEEE Internet Things J. 2024, 11, 16461–16477. [Google Scholar] [CrossRef]
- Mao, X.; Wu, G.; Fan, M.; Cao, Z.; Pedrycz, W. DL-DRL: A Double-Level Deep Reinforcement Learning Approach for Large-Scale Task Scheduling of Multi-UAV. IEEE Trans. Autom. Sci. Eng. 2024, 11, 1–17. [Google Scholar] [CrossRef]
- Li, K.; Yan, X.; Han, Y. Multi-Mechanism Swarm Optimization for Multi-UAV Task Assignment and Path Planning in Transmission Line Inspection under Multi-Wind Field. Appl. Soft Comput. 2024, 150, 111033. [Google Scholar] [CrossRef]
- Gao, H.; Feng, J.; Xiao, Y.; Zhang, B.; Wang, W. A UAV-Assisted Multi-Task Allocation Method for Mobile Crowd Sensing. IEEE Trans. Mob. Comput. 2023, 22, 3790–3804. [Google Scholar] [CrossRef]
- Yao, C.; Chen, X.; Wang, L.; Tong, W.; Wu, X.; Zhang, Y.; Yao, K. Coalition Game Based Relay Decision Distributed Learning in High Dynamic Heterogeneous Intelligent UAV Networks. J. Intell. Fuzzy Syst. 2018, 35, 133–140. [Google Scholar] [CrossRef]
- Guo, J.; Gan, M.; Hu, K. Relative Localization and Circumnavigation of a UGV0 Based on Mixed Measurements of Multi-UAVs by Employing Intelligent Sensors. Sensors 2024, 24, 2347. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Jiang, K.; Zhang, Y.; Jiang, L.; Luo, Y.; Wan, S. Deep Reinforcement Learning-Based Mining Task Offloading Scheme for Intelligent Connected Vehicles in UAV-Aided MEC. ACM Trans. Des. Autom. Electron. Syst. 2024, 29, 1–29. [Google Scholar] [CrossRef]
- Zeng, Y.; Chen, S.; Li, J.; Cui, Y.; Du, J. Online Optimization in UAV-Enabled MEC System: Minimizing Long-Term Energy Consumption Under Adapting to Heterogeneous Demands. IEEE Internet Things J. 2024, 29, 32143–32159. [Google Scholar] [CrossRef]
- Karegar, P.A.; Al-Hamid, D.Z.; Chong, P.H.J. UAV-Enabled Software Defined Data Collection from an Adaptive WSN. Wirel. Netw. 2024, 29, 1–22. [Google Scholar] [CrossRef]
- Bhunia, H.S.; Deb, A.K.; Mukherjee, J. Adaptive Target Response-Based Spatio-Temporal Regularized Correlation Filter for UAV-Based Object Tracking. Signal. Image Video Process. 2024, 18, 4763–4778. [Google Scholar] [CrossRef]
- Wu, Y.; Gou, J.; Ji, H.; Deng, J. Hierarchical Mission Replanning for Multiple UAV Formations Performing Tasks in Dynamic Situation. Comput. Commun. 2023, 200, 132–148. [Google Scholar] [CrossRef]
- Bartolomei, L.; Teixeira, L.; Chli, M. Fast Multi-UAV Decentralized Exploration of Forests. IEEE Robot. Autom. Lett. 2023, 8, 5576–5583. [Google Scholar] [CrossRef]
- Jiang, M.; Wang, Y.; Yu, F.; Peng, T.; Hu, X. UAV-FDN: Forest-Fire Detection Network for Unmanned Aerial Vehicle Perspective. J. Intell. Fuzzy Syst. 2023, 45, 5821–5836. [Google Scholar] [CrossRef]
- Cheng, B.; Ji, H.; Wang, Y. A New Method for Constructing Roads Map in Forest Area Using UAV Images. J. Comput. Methods Sci. Eng. 2023, 23, 573–587. [Google Scholar] [CrossRef]
- Le, V.V.; Nguyen, D.H.P.; Wang, H.-D.; Liu, B.-H.; Chu, S.-I. Efficient UAV Scheduling for Air Pollution Source Detection From Chimneys in an Industrial Area. IEEE Sens. J. 2022, 22, 19983–19994. [Google Scholar] [CrossRef]
- Boulares, M.; Fehri, A.; Jemni, M. UAV Path Planning Algorithm Based on Deep Q-Learning to Search for a Floating Lost Target in the Ocean. Rob. Auton. Syst. 2024, 179, 104730. [Google Scholar] [CrossRef]
- Bao, Y.; Huang, Y.; Liu, Y. UAV Remote Sensing Technology: A Review of Chinese Agricultural Patents. Recent Pat. Eng. 2024, 18, 104730. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A Compilation of UAV Applications for Precision Agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Luo, S.; Liang, Y.; Luo, Z.; Liang, G.; Wang, C.; Wu, X. Vision-Guided Object Recognition and 6D Pose Estimation System Based on Deep Neural Network for Unmanned Aerial Vehicles towards Intelligent Logistics. Appl. Sci. 2022, 13, 115. [Google Scholar] [CrossRef]
- Cheema, M.A.; Ansari, R.I.; Ashraf, N.; Hassan, S.A.; Qureshi, H.K.; Bashir, A.K.; Politis, C. Blockchain-Based Secure Delivery of Medical Supplies Using Drones. Comput. Netw. 2022, 204, 108706. [Google Scholar] [CrossRef]
- Hanif, M.; Shimizu, T.; Zhiyuan, L.; Suenaga, M.; Hatanaka, T. Efficient Angle-Aware Coverage Control for Large-Scale 3D Map Reconstruction Using Drone Networks. SICE J. Control. Meas. Syst. Integr. 2024, 17, 144–155. [Google Scholar] [CrossRef]
- Castellano, G.; De Marinis, P.; Vessio, G. Weed Mapping in Multispectral Drone Imagery Using Lightweight Vision Transformers. Neurocomputing 2023, 562, 126914. [Google Scholar] [CrossRef]
- Shuang, F.; Chen, X.; Li, Y.; Wang, Y.; Miao, N.; Zhou, Z. PLE: Power Line Extraction Algorithm for UAV-Based Power Inspection. IEEE Sens. J. 2022, 22, 19941–19952. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Q.; Zhang, T.; Ju, C.; Suzuki, S.; Namiki, A. UAV High-Voltage Power Transmission Line Autonomous Correction Inspection System Based on Object Detection. IEEE Sens. J. 2023, 23, 10215–10230. [Google Scholar] [CrossRef]
- Vieira e Silva, A.L.B.; de Castro Felix, H.; Simões, F.P.M.; Teichrieb, V.; dos Santos, M.; Santiago, H.; Sgotti, V.; Lott Neto, H. InsPLAD: A Dataset and Benchmark for Power Line Asset Inspection in UAV Images. Int. J. Remote Sens. 2023, 44, 7294–7320. [Google Scholar] [CrossRef]
- Wu, X.-J.; Xu, L.; Zhen, R.; Wu, X.-L. Global and Local Moth-Flame Optimization Algorithm for UAV Formation Path Planning Under Multi-Constraints. Int. J. Control. Autom. Syst. 2023, 21, 1032–1047. [Google Scholar] [CrossRef]
- Babel, L. Online Flight Path Planning with Flight Time Constraints for Fixed-Wing UAVs in Dynamic Environments. Int. J. Intell. Unmanned Syst. 2022, 10, 416–443. [Google Scholar] [CrossRef]
- Athira, K.A.; Yalavarthi, R.; Saisandeep, T.; Harshith, K.S.S.; Sha, A. ACO-DTSP Algorithm: Optimizing UAV Swarm Routes with Workload Constraints. Procedia Comput. Sci. 2024, 235, 163–172. [Google Scholar]
- Farid, G.; Cocuzza, S.; Younas, T.; Razzaqi, A.A.; Wattoo, W.A.; Cannella, F.; Mo, H. Modified A-Star (A*) Approach to Plan the Motion of a Quadrotor UAV in Three-Dimensional Obstacle-Cluttered Environment. Appl. Sci. 2022, 12, 5791. [Google Scholar] [CrossRef]
- Wang, J.; Li, Y.; Li, R.; Chen, H.; Chu, K. Trajectory Planning for UAV Navigation in Dynamic Environments with Matrix Alignment Dijkstra. Soft Comput. 2022, 26, 12599–12610. [Google Scholar] [CrossRef]
- Pehlivanoglu, Y.V.; Pehlivanoglu, P. An Enhanced Genetic Algorithm for Path Planning of Autonomous UAV in Target Coverage Problems. Appl. Soft Comput. 2021, 112, 107796. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, X.; Zhang, X.-Y.; Xiao, J.; Yu, X. RGG-PSO+: Random Geometric Graphs Based Particle Swarm Optimization Method for UAV Path Planning. Int. J. Comput. Intell. Syst. 2024, 17, 127. [Google Scholar] [CrossRef]
- Morshed Alam, M.; Moh, S. Joint Optimization of Trajectory Control, Task Offloading, and Resource Allocation in Air-Ground Integrated Networks. IEEE Internet Things J. 2024, 11, 24273–24288. [Google Scholar] [CrossRef]
- Alam, M.M.; Arafat, M.Y.; Moh, S.; Shen, J. Topology Control Algorithms in Multi-Unmanned Aerial Vehicle Networks: An Extensive Survey. J. Netw. Comput. Appl. 2022, 207, 103495. [Google Scholar] [CrossRef]
- Kownacki, C. Self-Adaptive Asymmetrical Artificial Potential Field Approach Dedicated to the Problem of Position Tracking by Nonholonomic UAVs in Windy Enivroments. Acta Mech. Autom. 2021, 15, 37–46. [Google Scholar] [CrossRef]
- Huang, T.; Fan, K.; Sun, W. Density Gradient-RRT: An Improved Rapidly Exploring Random Tree Algorithm for UAV Path Planning. Expert Syst. Appl. 2024, 252, 124121. [Google Scholar] [CrossRef]
- Wu, X.; Xu, L.; Zhen, R.; Wu, X. Biased Sampling Potentially Guided Intelligent Bidirectional RRT ∗ Algorithm for UAV Path Planning in 3D Environment. Math. Probl. Eng. 2019, 2019, 5157403. [Google Scholar] [CrossRef]
- Xing, X.; Zhou, Z.; Li, Y.; Xiao, B.; Xun, Y. Multi-UAV Adaptive Cooperative Formation Trajectory Planning Based on An Improved MATD3 Algorithm of Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2024, 11, 12484–12499. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, Z.; Laganière, R.; Zhang, H.; Ding, L. A UAV to UAV Tracking Benchmark. Knowl. -Based Syst. 2023, 261, 110197. [Google Scholar] [CrossRef]
- Huo, Y.-L.; Chen, B.; Zhang, J.-S.; Zhang, Q.-S. UAV Target Tracking Algorithm Based on Illumination Adaptation and Future Awareness in Low Illumination Scenes. Int. J. Pattern Recognit. Artif. Intell. 2024, 38, 110197. [Google Scholar] [CrossRef]
- Emami, Y.; Gao, H.; Li, K.; Almeida, L.; Tovar, E.; Han, Z. Age of Information Minimization Using Multi-Agent UAVs Based on AI-Enhanced Mean Field Resource Allocation. IEEE Trans. Veh. Technol. 2024, 11, 13368–13380. [Google Scholar] [CrossRef]
- Chen, X.; Zhao, M.; Yin, L. Dynamic Path Planning of the UAV Avoiding Static and Moving Obstacles. J. Intell. Robot. Syst. 2020, 99, 909–931. [Google Scholar] [CrossRef]
- Ali, H.; Xiong, G.; Haider, M.H.; Tamir, T.S.; Dong, X.; Shen, Z. Feature Selection-Based Decision Model for UAV Path Planning on Rough Terrains. Expert Syst. Appl. 2023, 232, 120713. [Google Scholar] [CrossRef]
- Niu, Y.; Yan, X.; Wang, Y.; Niu, Y. 3D Real-Time Dynamic Path Planning for UAV Based on Improved Interfered Fluid Dynamical System and Artificial Neural Network. Adv. Eng. Inform. 2024, 59, 102306. [Google Scholar] [CrossRef]
- Shastry, A.K.; Paley, D.A. System Identification for High-performance UAV Control in Wind. Int. J. Robust Nonlinear Control 2023, 33, 10451–10467. [Google Scholar] [CrossRef]
- Bono Rossello, N.; Carpio, R.F.; Gasparri, A.; Garone, E. Information-Driven Path Planning for UAV With Limited Autonomy in Large-Scale Field Monitoring. IEEE Trans. Autom. Sci. Eng. 2022, 19, 2450–2460. [Google Scholar] [CrossRef]
- Im, J.; Lee, B.-Y. Multi-Agent Inspection Path Planning with Large-Scale Vehicle Routing Problem. J. Aerosp. Inf. Syst. 2023, 20, 378–386. [Google Scholar] [CrossRef]
- Xie, R.; Meng, Z.; Wang, L.; Li, H.; Wang, K.; Wu, Z. Unmanned Aerial Vehicle Path Planning Algorithm Based on Deep Reinforcement Learning in Large-Scale and Dynamic Environments. IEEE Access 2021, 9, 24884–24900. [Google Scholar] [CrossRef]
- Gamagedara, K.; Lee, T. Geometric Adaptive Controls of a Quadrotor Unmanned Aerial Vehicle With Decoupled Attitude Dynamics. J. Dyn. Syst. Meas. Control 2022, 144, 031002. [Google Scholar] [CrossRef]
- McTegg, S.J.; Tarsha Kurdi, F.; Simmons, S.; Gharineiat, Z. Comparative Approach of Unmanned Aerial Vehicle Restrictions in Controlled Airspaces. Remote Sens. 2022, 14, 822. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Ramos, L.; Mondéjar-Guerra, V.; Fernández-Caramés, T.M. A Review on IoT Deep Learning UAV Systems for Autonomous Obstacle Detection and Collision Avoidance. Remote Sens. 2019, 11, 2144. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, T.; Liu, Y.; Yang, D.; Xiao, L.; Tao, M. 3D Multi-UAV Computing Networks: Computation Capacity and Energy Consumption Tradeoff. IEEE Trans. Veh. Technol. 2024, 73, 10627–10641. [Google Scholar] [CrossRef]
- Mia, M.S.; Tanabe, R.; Habibi, L.N.; Hashimoto, N.; Homma, K.; Maki, M.; Matsui, T.; Tanaka, T.S.T. Multimodal Deep Learning for Rice Yield Prediction Using UAV-Based Multispectral Imagery and Weather Data. Remote Sens. 2023, 15, 2511. [Google Scholar] [CrossRef]
- Zheng, X.; Wu, Y.; Zhang, L.; Tang, M.; Zhu, F. Priority-Aware Path Planning and User Scheduling for UAV-Mounted MEC Networks: A Deep Reinforcement Learning Approach. Phys. Commun. 2024, 62, 102234. [Google Scholar] [CrossRef]
- Mao, Z.; Hou, M.; Li, H.; Yang, Y.; Song, W. Multi-UAV Cooperative Motion Planning Under Global Spatio-Temporal Path Inspiration in Constraint-Rich Dynamic Environments. IEEE Trans. Intell. Veh. 2024, 21, 1–14. [Google Scholar] [CrossRef]
- Qu, C.; Gai, W.; Zhang, J.; Zhong, M. A Novel Hybrid Grey Wolf Optimizer Algorithm for Unmanned Aerial Vehicle (UAV) Path Planning. Knowl. -Based Syst. 2020, 194, 105530. [Google Scholar] [CrossRef]
- Ramirez Atencia, C.; Del Ser, J.; Camacho, D. Weighted Strategies to Guide a Multi-Objective Evolutionary Algorithm for Multi-UAV Mission Planning. Swarm Evol. Comput. 2019, 44, 480–495. [Google Scholar] [CrossRef]
- Lee, S.; Kang, H.; Lee, J.; Kim, Y. Optimal Policy of Pitch-Hold Phase for Mine Detection of UAV Based on Mixed-Integer Linear Programming. Int. J. Aeronaut. Sp. Sci. 2022, 23, 746–754. [Google Scholar] [CrossRef]
- Liu, G.; Li, B.; Ji, Y. A Modified HP-Adaptive Pseudospectral Method for Multi-UAV Formation Reconfiguration. ISA Trans. 2022, 129, 217–229. [Google Scholar] [CrossRef]
- Li, Y.; Tian, W.; Ji, X.; Liu, G.; Dai, Y. Optimal Position Design for Unmanned Aerial Vehicle Relay-Assisted Covert Communication Based on Active Countermeasures. IEEE Syst. J. 2024, 18, 692–701. [Google Scholar] [CrossRef]
- Meng, K.; Chen, C.; Wu, T.; Xin, B.; Liang, M.; Deng, F. Evolutionary State Estimation-Based Multi-Strategy Jellyfish Search Algorithm for Multi-UAV Cooperative Path Planning. IEEE Trans. Intell. Veh. 2024, 18, 1–19. [Google Scholar] [CrossRef]
- Han, P.; Wu, X.; Sui, A. DTPBFT: A Dynamic and Highly Trusted Blockchain Consensus Algorithm for UAV Swarm. Comput. Netw. 2024, 250, 110602. [Google Scholar] [CrossRef]
- Xu, Y.; Li, X.; Meng, X.; Zhang, W. An Iterated Greedy Heuristic for Collaborative Human-UAV Search of Missing Tourists. Knowl. -Based Syst. 2024, 286, 111409. [Google Scholar] [CrossRef]
- Li, J.; Yang, X.; Yang, Y.; Liu, X. Cooperative Mapping Task Assignment of Heterogeneous Multi-UAV Using an Improved Genetic Algorithm. Knowl. -Based Syst. 2024, 296, 111830. [Google Scholar] [CrossRef]
- Ye, Z.; Li, H.; Wei, W. Improved Particle Swarm Optimization Based on Multi-Strategy Fusion for UAV Path Planning. Int. J. Intell. Comput. Cybern. 2024, 17, 213–235. [Google Scholar] [CrossRef]
- Azam, M.A.; Mittelmann, H.D.; Ragi, S. UAV Formation Shape Control via Decentralized Markov Decision Processes. Algorithms 2021, 14, 91. [Google Scholar] [CrossRef]
- Haghighi, H.; Delahaye, D.; Moschetta, J.-M.; Asadi, D. UAV Trajectory Optimization for Maximum Soaring in Windy Environment. Unmanned Syst. 2024, 14, 1–14. [Google Scholar] [CrossRef]
- Sree, A.D.; Sharma, K. Machine Learning Based Secure Routing Protocol with Uav-Assisted for Autonomous Vehicles. Int. J. Sens. Wirel. Commun. Control 2024, 14, 55–65. [Google Scholar]
- J, A.; G, N.; Sureshkumar, C.; V, N.; Kadry, S. Enhancing UAV Path Planning Efficiency through Adam-Optimized Deep Neural Networks for Area Coverage Missions. Procedia Comput. Sci. 2024, 235, 2–11. [Google Scholar] [CrossRef]
- Zhu, P.; Fang, X. Multi-UAV Cooperative Task Assignment Based on Half Random Q-Learning. Symmetry 2021, 13, 2417. [Google Scholar] [CrossRef]
- Kaur, A.; Jha, S.S. Age-of-Information Based Multi-UAV Trajectories Using Deep Reinforcement Learning. IETE Tech. Rev. 2024, 18, 1–13. [Google Scholar] [CrossRef]
- González-Lluch, C.; Plumed, R.; Pérez-López, D.; Company, P.; Contero, M.; Camba, J.D. A Constraint Redundancy Elimination Strategy to Improve Design Reuse in Parametric Modeling. Comput. Ind. 2021, 129, 103460. [Google Scholar] [CrossRef]
- Chen, X.; Zhou, B. A Heuristics Pulse Algorithm with Relaxation Pruning Strategy for Resources Re-Initialized UAV Path Planing. J. Intell. Fuzzy Syst. 2021, 41, 3541–3553. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K. Goal Distance-Based UAV Path Planning Approach, Path Optimization and Learning-Based Path Estimation: GDRRT*, PSO-GDRRT* and BiLSTM-PSO-GDRRT*. Appl. Soft Comput. 2023, 137, 110156. [Google Scholar] [CrossRef]
- Zhu, G.; Yao, H.; Mai, T.; Wang, Z.; Wu, D.; Guo, S. Fission Spectral Clustering Strategy for UAV Swarm Networks. IEEE Trans. Serv. Comput. 2024, 17, 537–548. [Google Scholar] [CrossRef]
- Luo, X.; Wang, Q.; Gong, H.; Tang, C. UAV Path Planning Based on the Average TD3 Algorithm With Prioritized Experience Replay. IEEE Access 2024, 12, 38017–38029. [Google Scholar] [CrossRef]
- Jiang, H.; Yu, Q.; Han, D.; Chen, Y.; Li, Z. A Path Planning Method for Unmanned Aerial Vehicle Based on Improved Wolf Pack Algorithm. Concurr. Comput. Pract. Exp. 2024, 36, 38017–38029. [Google Scholar] [CrossRef]
- Zhu, Y.; Tan, Y.; Chen, Y.; Chen, L.; Lee, K.Y. UAV Path Planning Based on Random Obstacle Training and Linear Soft Update of DRL in Dense Urban Environment. Energies 2024, 17, 2762. [Google Scholar] [CrossRef]
- Abro, G.E.M.; Abdallah, A.M. Digital Twins and Control Theory: A Critical Review on Revolutionizing Quadrotor UAVs. IEEE Access 2024, 12, 43291–43307. [Google Scholar] [CrossRef]
- Kovryzhenko, Y.; Li, N.; Taheri, E. Implementation of a Data-Driven Control Method for Unmanned Aerial Vehicles. In AIAA AVIATION FORUM AND ASCEND; AIAA: Reston, VA, USA, 2024; p. 3658. [Google Scholar]
- Hoshu, A.A.; Mustafa Abro, G.E.; Alhussein, M.; Tunio, I.A.; Aurangzeb, K.; Ali, A. Cascaded Control System Design for Quadrotor UAV through Relay with Embedded Integrator-Based Automatic Tuning Approach. Int. J. Aerosp. Eng. 2023, 2023, 6651286. [Google Scholar] [CrossRef]
- Abitha, M.A.; Saleem, A. Quadrotor Modeling Approaches and Trajectory Tracking Control Algorithms: A Review. Int. J. Robot. Control Syst. 2024, 4, 401–426. [Google Scholar]
- Bany Salameh, H.; Hussienat, A.; Alhafnawi, M.; Al-Ajlouni, A. Autonomous UAV-Based Surveillance System for Multi-Target Detection Using Reinforcement Learning. Clust. Comput. 2024, 17, 2762. [Google Scholar] [CrossRef]
- Jiang, W.; Cai, T.; Xu, G.; Wang, Y. Autonomous Obstacle Avoidance and Target Tracking of UAV: Transformer for Observation Sequence in Reinforcement Learning. Knowl.-Based Syst. 2024, 290, 111604. [Google Scholar] [CrossRef]
- Zhao, F.; Zeng, Y.; Wang, G.; Bai, J.; Xu, B. A Brain-Inspired Decision Making Model Based on Top-Down Biasing of Prefrontal Cortex to Basal Ganglia and Its Application in Autonomous UAV Explorations. Cognit. Comput. 2018, 10, 296–306. [Google Scholar] [CrossRef]
- Huang, T.; Chen, Z.; Gao, W.; Xue, Z.; Liu, Y. A USV-UAV Cooperative Trajectory Planning Algorithm with Hull Dynamic Constraints. Sensors 2023, 23, 1845. [Google Scholar] [CrossRef] [PubMed]
- Vinokursky, D.L.; Mezentseva, O.S.; Samoylov, P.V.; Ganshin, K.Y.; Baklanova, O.A. Model Predictive Control for Path Planning of UAV Group. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1155, 012092. [Google Scholar]
- Tripicchio, P.; Unetti, M.; D’Avella, S.; Avizzano, C.A. Smooth Coverage Path Planning for UAVs with Model Predictive Control Trajectory Tracking. Electronics 2023, 12, 2310. [Google Scholar] [CrossRef]
- Liu, J.; Yan, Y.; Yang, Y.; Li, J. An Improved Artificial Potential Field UAV Path Planning Algorithm Guided by RRT Under Environment-Aware Modeling: Theory and Simulation. IEEE Access 2024, 12, 12080–12097. [Google Scholar] [CrossRef]
- Zhang, Y.-J.; Wang, Y.-F.; Yan, Y.-X.; Zhao, J.; Gao, Z.-M. Self-Adaptive Hybrid Mutation Slime Mould Algorithm: Case Studies on UAV Path Planning, Engineering Problems, Photovoltaic Models and Infinite Impulse Response. Alexandria Eng. J. 2024, 98, 364–389. [Google Scholar] [CrossRef]
- Yang, X.; Du, Y.; Li, L.; Zhou, Z.; Zhang, X. Physics-Informed Neural Network for Model Prediction and Dynamics Parameter Identification of Collaborative Robot Joints. IEEE Robot. Autom. Lett. 2023, 8, 8462–8469. [Google Scholar] [CrossRef]
- Shi, L.; Li, B.; Shi, W. Vision-Based UAV Adaptive Tracking Control for Moving Targets with Velocity Observation. Trans. Inst. Meas. Control 2024, 8, 8462–8469. [Google Scholar] [CrossRef]
- Geronel, R.S.; Bueno, D.D. Adaptive Sliding Mode Control for Vibration Reduction on UAV Carrying a Payload. J. Vib. Control 2024, 8, 8462–8469. [Google Scholar] [CrossRef]
- He, J.; Xiao, Y.; Bogdan, C.; Nazarian, S.; Bogdan, P. A Design Methodology for Energy-Aware Processing in Unmanned Aerial Vehicles. ACM Trans. Des. Autom. Electron. Syst. 2022, 27, 1–20. [Google Scholar] [CrossRef]
- Jabeen, M.; Meng, Q.-H.; Hou, H.-R.; Li, H.-Y. Odor Source Localization in Outdoor Building Environments through Distributed Cooperative Control of a Fleetof UAVs. Expert Syst. Appl. 2024, 247, 123332. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, X.; Lv, M. Distributed Adaptive Specified-Time Synchronization Tracking of Multiple 6-DOF Fixed-Wing UAVs with Guaranteed Performances. ISA Trans. 2022, 129, 260–272. [Google Scholar] [CrossRef] [PubMed]
- Campos, J.M.; Cardoso, D.N.; Raffo, G.V. Robust Adaptive Control with Reduced Conservatism for a Convertible UAV. IFAC-Pap. 2023, 56, 4520–4526. [Google Scholar] [CrossRef]
- Shen, L.; Wang, N.; Zhu, Z.; Xu, W.; Li, Y.; Mu, X.; Cai, L. UAV-Enabled Data Collection Over Clustered Machine-Type Communication Networks: AEM Modeling and Trajectory Planning. IEEE Trans. Veh. Technol. 2022, 71, 10016–10032. [Google Scholar] [CrossRef]
- Zhu, S.; Gui, L.; Cheng, N.; Sun, F.; Zhang, Q. Joint Design of Access Point Selection and Path Planning for UAV-Assisted Cellular Networks. IEEE Internet Things J. 2020, 7, 220–233. [Google Scholar] [CrossRef]
- Wang, L.; Zheng, S.; Tai, S.; Liu, H.; Yue, T. UAV Air Combat Autonomous Trajectory Planning Method Based on Robust Adversarial Reinforcement Learning. Aerosp. Sci. Technol. 2024, 153, 109402. [Google Scholar] [CrossRef]
- Liu, X.; Zhong, W.; Wang, X.; Duan, H.; Fan, Z.; Jin, H.; Huang, Y.; Lin, Z. Deep Reinforcement Learning-Based 3D Trajectory Planning for Cellular Connected UAV. Drones 2024, 8, 199. [Google Scholar] [CrossRef]
- Bajwa, O.I.; Baluch, H.A.; Saeed, H.A. Machine Learning Approach for Predicting Key Design Parameters in UAV Conceptual Design. Ain Shams Eng. J. 2024, 15, 102932. [Google Scholar] [CrossRef]
- Tsipi, L.; Karavolos, M.; Vouyioukas, D. An Unsupervised Machine Learning Approach for UAV-Aided Offloading of 5G Cellular Networks. Telecom 2022, 3, 86–102. [Google Scholar] [CrossRef]
- Biçici, S. Different KNN Parameters on Road Surface Extraction from UAV-Based Point Cloud under Several Machine Learning Algorithms. Meas. Sci. Technol. 2024, 35, 106005. [Google Scholar] [CrossRef]
- Li, X.; Tan, J.; Liu, A.; Vijayakumar, P.; Kumar, N.; Alazab, M. A Novel UAV-Enabled Data Collection Scheme for Intelligent Transportation System Through UAV Speed Control. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2100–2110. [Google Scholar] [CrossRef]
- Han, R.; Wen, Y.; Bai, L.; Liu, J.; Choi, J. Age of Information Aware UAV Deployment for Intelligent Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2022, 23, 2705–2715. [Google Scholar] [CrossRef]
- Tong, S.; Liu, Y.; Mišić, J.; Chang, X.; Zhang, Z.; Wang, C. Joint Task Offloading and Resource Allocation for Fog-Based Intelligent Transportation Systems: A UAV-Enabled Multi-Hop Collaboration Paradigm. IEEE Trans. Intell. Transp. Syst. 2023, 24, 12933–12948. [Google Scholar] [CrossRef]
- Shao, S.; Peng, Y.; He, C.; Du, Y. Efficient Path Planning for UAV Formation via Comprehensively Improved Particle Swarm Optimization. ISA Trans. 2020, 97, 415–430. [Google Scholar] [CrossRef] [PubMed]
- Luo, L.; Wang, X.; Ma, J.; Ong, Y.-S. GrpAvoid: Multigroup Collision-Avoidance Control and Optimization for UAV Swarm. IEEE Trans. Cybern. 2023, 53, 1776–1789. [Google Scholar] [CrossRef]
- Du, Z.; Qu, X.; Shi, J.; Lu, J. Formation Control of Fixed-Wing UAVs with Communication Delay. ISA Trans. 2024, 146, 154–164. [Google Scholar] [CrossRef]
- Ao, T.; Zhang, K.; Shi, H.; Jin, Z.; Zhou, Y.; Liu, F. Energy-Efficient Multi-UAVs Cooperative Trajectory Optimization for Communication Coverage: An MADRL Approach. Remote Sens. 2023, 15, 429. [Google Scholar] [CrossRef]
- Alsuhli, G.; Fahim, A.; Gadallah, Y. A Survey on the Role of UAVs in the Communication Process: A Technological Perspective. Comput. Commun. 2022, 194, 86–123. [Google Scholar] [CrossRef]
- Ladosz, P.; Oh, H.; Zheng, G.; Chen, W.-H. Gaussian Process Based Channel Prediction for Communication-Relay UAV in Urban Environments. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 313–325. [Google Scholar] [CrossRef]
- Han, S. Resource Allocation of Multiple Base Stations for Throughput Enhancement in UAV Relay Networks. Electronics 2023, 12, 4053. [Google Scholar] [CrossRef]
- Ralegankar, V.K.; Bagul, J.; Thakkar, B.; Gupta, R.; Tanwar, S.; Sharma, G.; Davidson, I.E. Quantum Cryptography-as-a-Service for Secure UAV Communication: Applications, Challenges, and Case Study. IEEE Access 2022, 10, 1475–1492. [Google Scholar] [CrossRef]
- Lu, Z.; Wu, G.; Zhou, F.; Wu, Q. Intelligently Joint Task Assignment and Trajectory Planning for UAV Cluster with Limited Communication. IEEE Trans. Veh. Technol. 2024, 73, 13122–13137. [Google Scholar] [CrossRef]
- Song, Y.; Lee, H.; Kang, D.; Kim, B.; Park, M. A Study on the Determination Methods of Monitoring Point for Inundation Damage in Urban Area Using UAV and Hydrological Modeling. Water 2022, 14, 1117. [Google Scholar] [CrossRef]
- Darji, K.; Patel, D.; Prakash, I.; Altuwaijri, H.A. Hydrodynamic Modeling of Dam Breach Floods for Predicting Downstream Inundation Scenarios Using Integrated Approach of Satellite Data, Unmanned Aerial Vehicles (UAVs), and Google Earth Engine (GEE). Appl. Water Sci. 2024, 14, 187. [Google Scholar] [CrossRef]
- Lei, C.; Feng, W.; Wei, P.; Chen, Y.; Ge, N.; Mao, S. Edge Information Hub: Orchestrating Satellites, UAVs, MEC, Sensing and Communications for 6G Closed-Loop Controls. IEEE J. Sel. Areas Commun. 2024, 14, 1. [Google Scholar] [CrossRef]
- Dang, K.D.; Le, H.D.; Nguyen, C.T.; Pham, A.T. Resource Allocation for Hybrid FSO/RF Satellite-Assisted Multiple Backhauled UAVs over Starlink Networks. IEICE Commun. Express 2024, 13, 52–55. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Nature | Function | Reference |
|---|---|---|---|
| Strong constraint | Cannot be violated and directly determine mission success | - Ensure flight safety - Ensure flight safety - Satisfy physical performance constraints | [66] |
| Physical constraint | Vehicle speed, altitude, etc. | Limit the maximum speed, minimum turning radius, altitude, etc. of the UAV in the air | [67] |
| Safe Obstacle Avoidance | Safe distance between UAV and from obstacles | Avoiding collisions and ensuring the safety of UAV and other flying vehicles | [68] |
| Communication and control limitation | Ensure that the UAV can receive control commands | Ensure real-time communication with the control center during the mission | [69] |
| Type | Nature | Function | Reference |
|---|---|---|---|
| Weak constraint | Can be flexibly adjusted and ignored under certain conditions | - Increase flexibility in task scheduling - Balancing mission priorities in conflicts | [70] |
| Time window | Start time and end time adjustment allowed | Adjustment is allowed within the characteristic time | [71,72] |
| Mission priority | Some minor missions can be postponed | Adjustment of low priority missions in case of multiple missions to optimize resource use | [73] |
| Linear correlation analysis between constraints |
If exists, the corresponding constraints are redundant. |
| Geometric feasible domain analysis of constraint sets |
|
| Optimized relaxation method |
|
| Distance-based heuristics | ● Represent all linear constraints in matrix form: ● Calculate the distances and between constraints, which can be carried out using the following formula: ● The Euclidean norm is defined as follows: ● Set a distance threshold Set a distance threshold ε. When the distance between two constraints is less than the threshold, the constraint can be refined. ● Remove redundant constraints Traverse all constraints to and remove one of the redundant constraints if . |
| Importance-based heuristics | ● Measure the importance of a constraint by calculating the Lagrange multiplier for each constraint: is the Lagrangian multiplier vector. ● Obtain the Lagrange multiplier for each constraint, which reflects the importance of the constraint. Set the importance threshold τ and iterate through all constraints. If the importance of a constraint is less than the threshold τ, the constraint is deleted. |
| Cluster-based heuristics | ● Set the number of clusters K to divide the constraint into K clusters. ● Initialize K clusters: ● , calculate its distance to each cluster center and assign it to the nearest cluster center. ● Update the center of each cluster to the mean of all constraints in the cluster: ● For each cluster, select a representative constraint (usually the one closest to the center of the cluster); the rest are considered redundant constraints and can be removed. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, G.; Hu, M.; Yang, X.; Lin, P.; Wang, Y. Addressing Constraint Coupling and Autonomous Decision-Making Challenges: An Analysis of Large-Scale UAV Trajectory-Planning Techniques. Drones 2024, 8, 530. https://doi.org/10.3390/drones8100530
Huang G, Hu M, Yang X, Lin P, Wang Y. Addressing Constraint Coupling and Autonomous Decision-Making Challenges: An Analysis of Large-Scale UAV Trajectory-Planning Techniques. Drones. 2024; 8(10):530. https://doi.org/10.3390/drones8100530
Chicago/Turabian StyleHuang, Gang, Min Hu, Xueying Yang, Peng Lin, and Yijun Wang. 2024. "Addressing Constraint Coupling and Autonomous Decision-Making Challenges: An Analysis of Large-Scale UAV Trajectory-Planning Techniques" Drones 8, no. 10: 530. https://doi.org/10.3390/drones8100530
APA StyleHuang, G., Hu, M., Yang, X., Lin, P., & Wang, Y. (2024). Addressing Constraint Coupling and Autonomous Decision-Making Challenges: An Analysis of Large-Scale UAV Trajectory-Planning Techniques. Drones, 8(10), 530. https://doi.org/10.3390/drones8100530