
The Design of Improved Series Hybrid Power System Based on Compound-Wing VTOL

Abstract
1. Introduction
2. The Architecture and Description of the Hybrid Power System
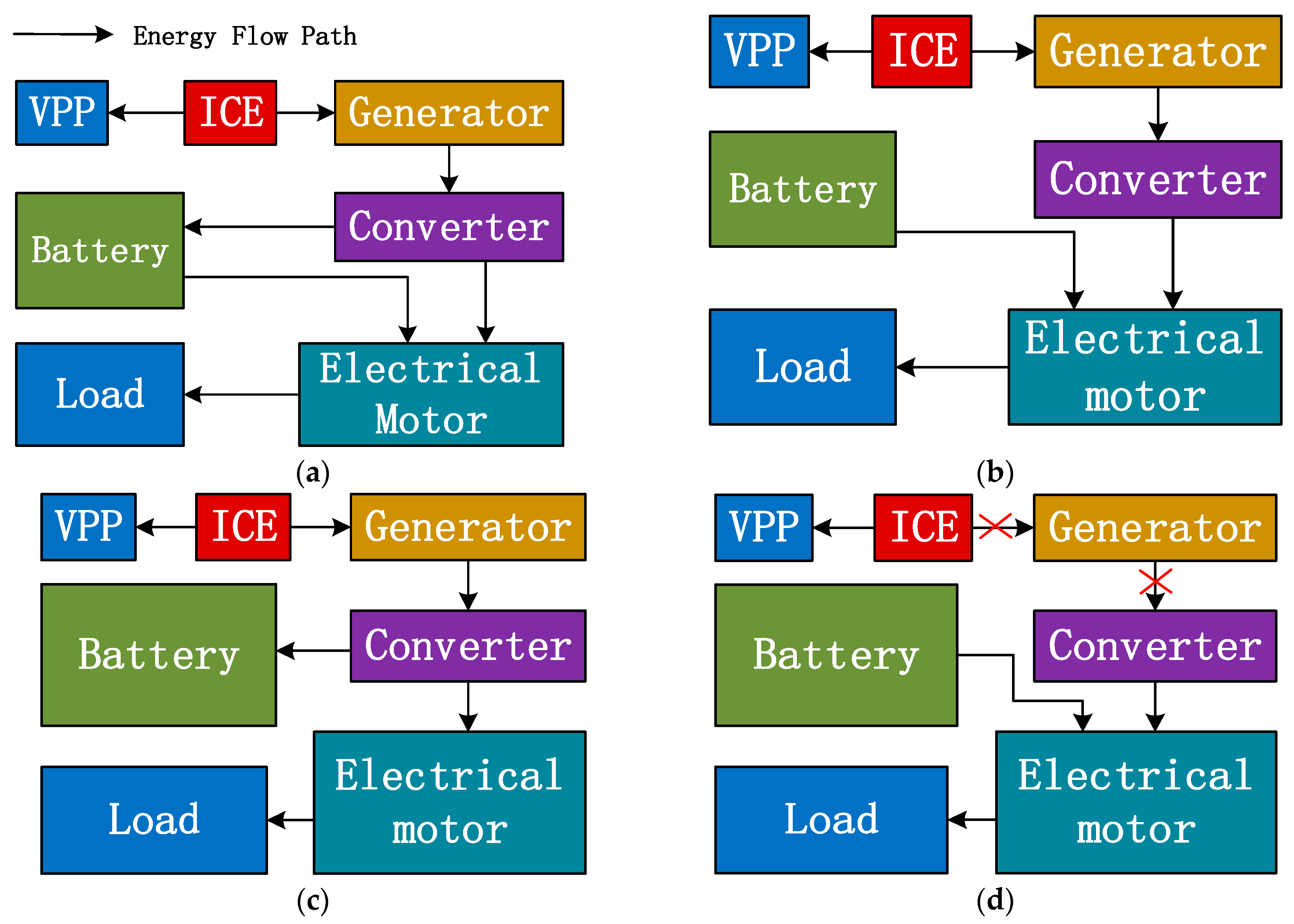
2.1. The Architecture of Hybrid Power System
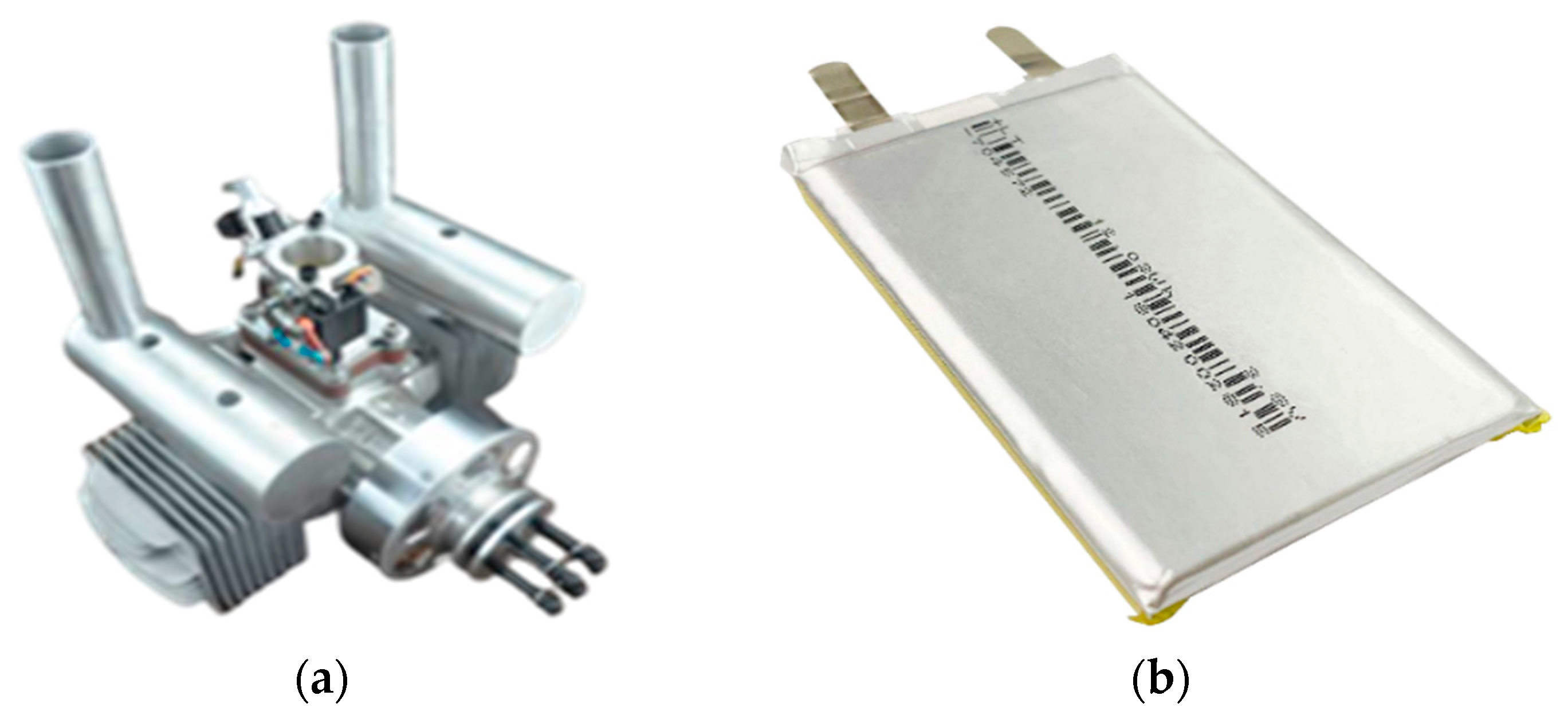
2.2. Main Components of Hybrid Power System
3. The Design and Implement of the System
3.1. The Practical Requirements of Internal Combustion Engine
3.2. A Brief Theoretical Design of Generator
3.3. The Demands of Li-Po Battery
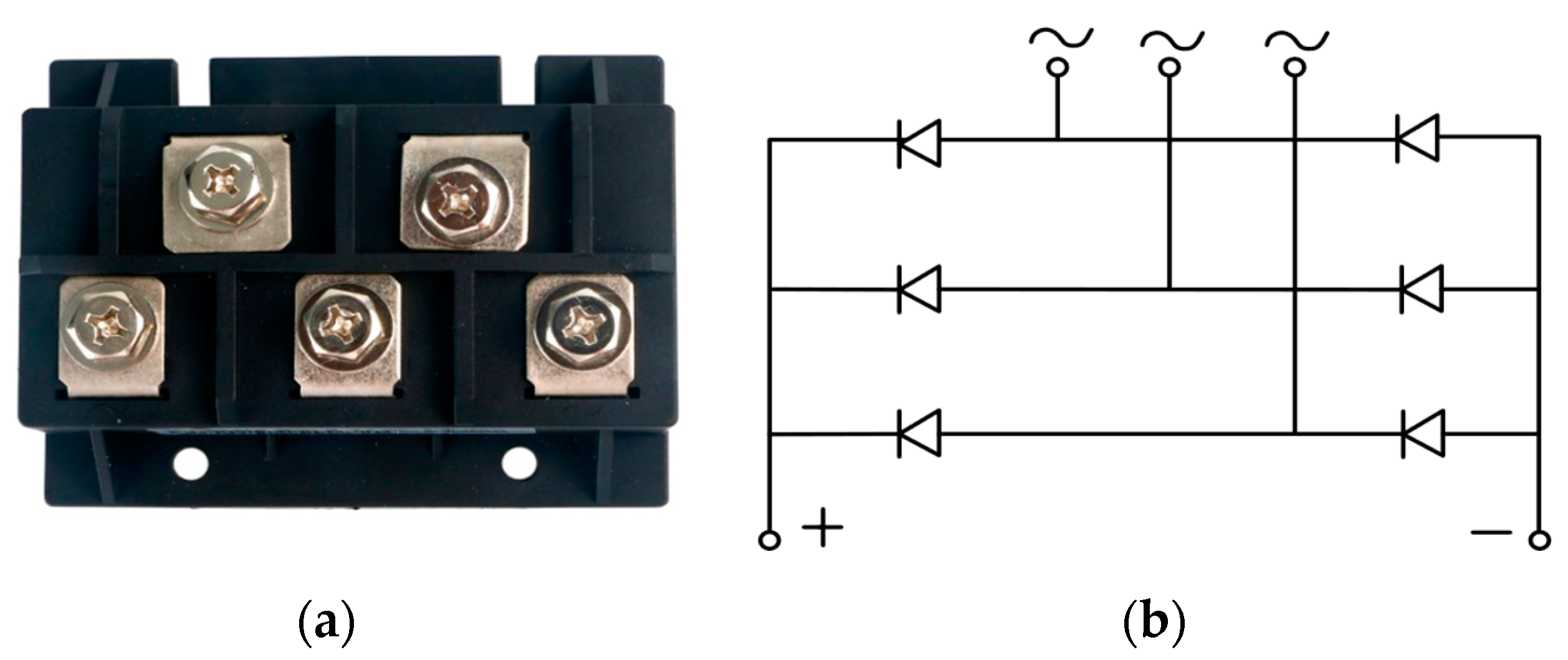
3.4. The Selection of Rectifier
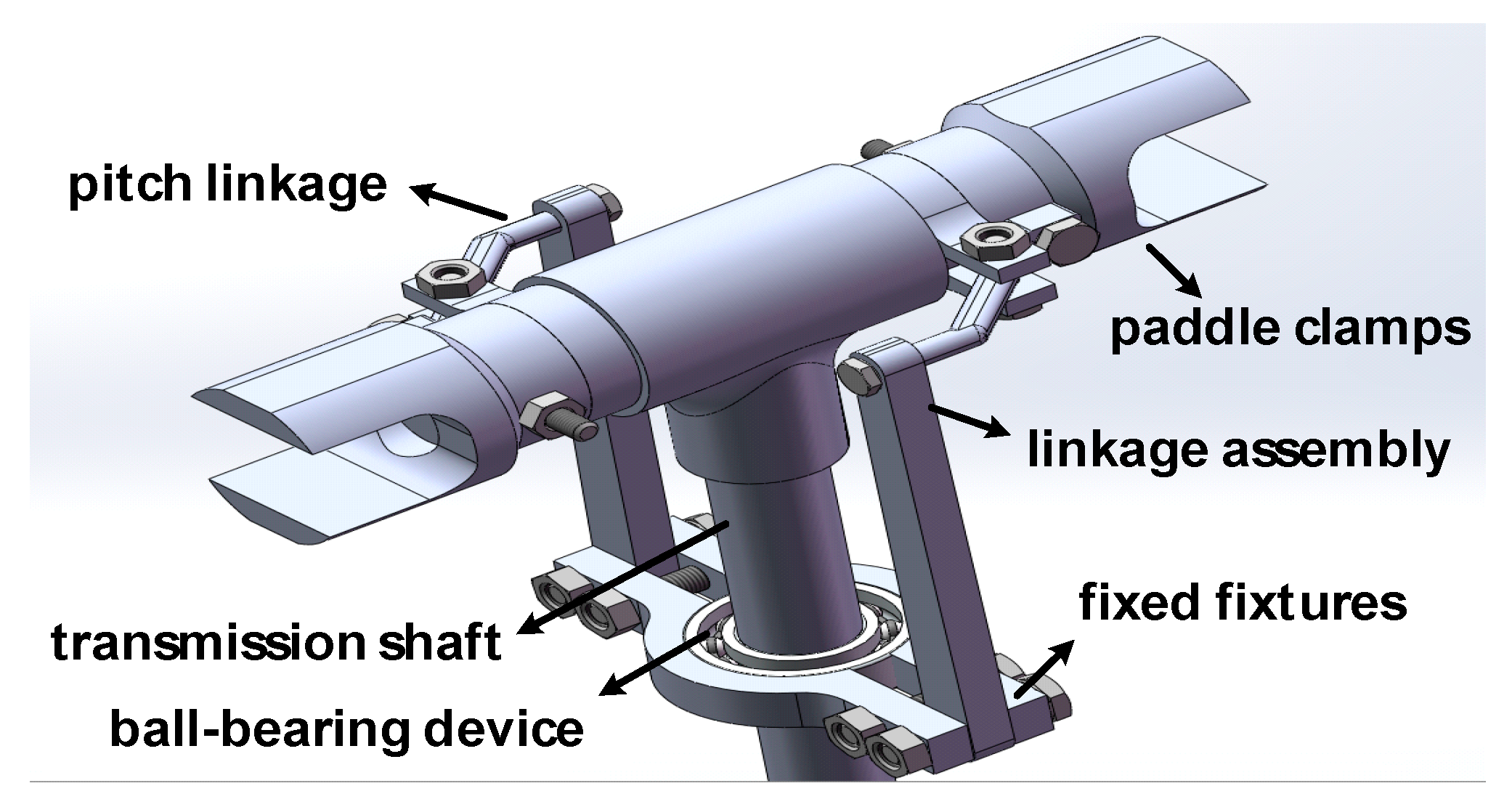
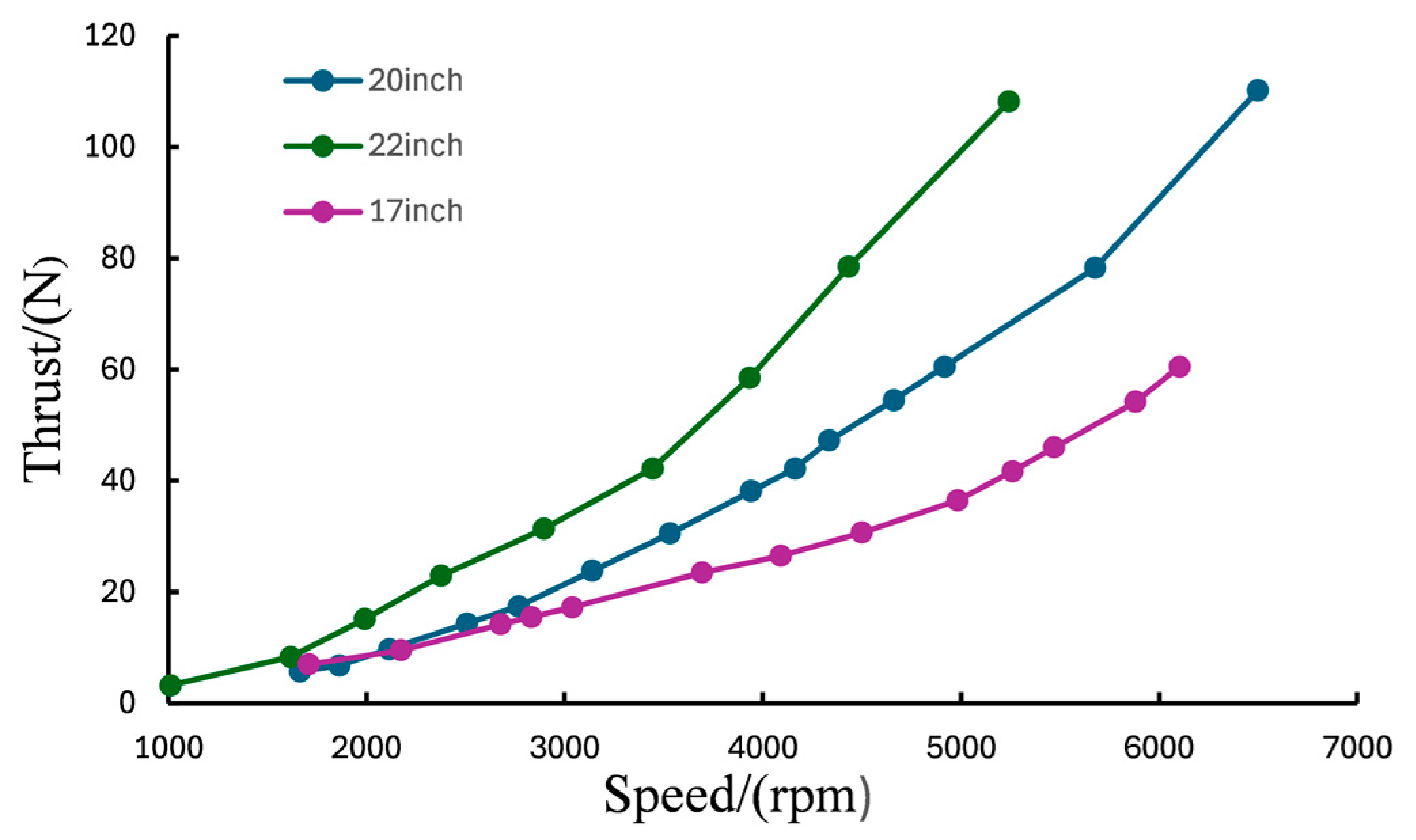
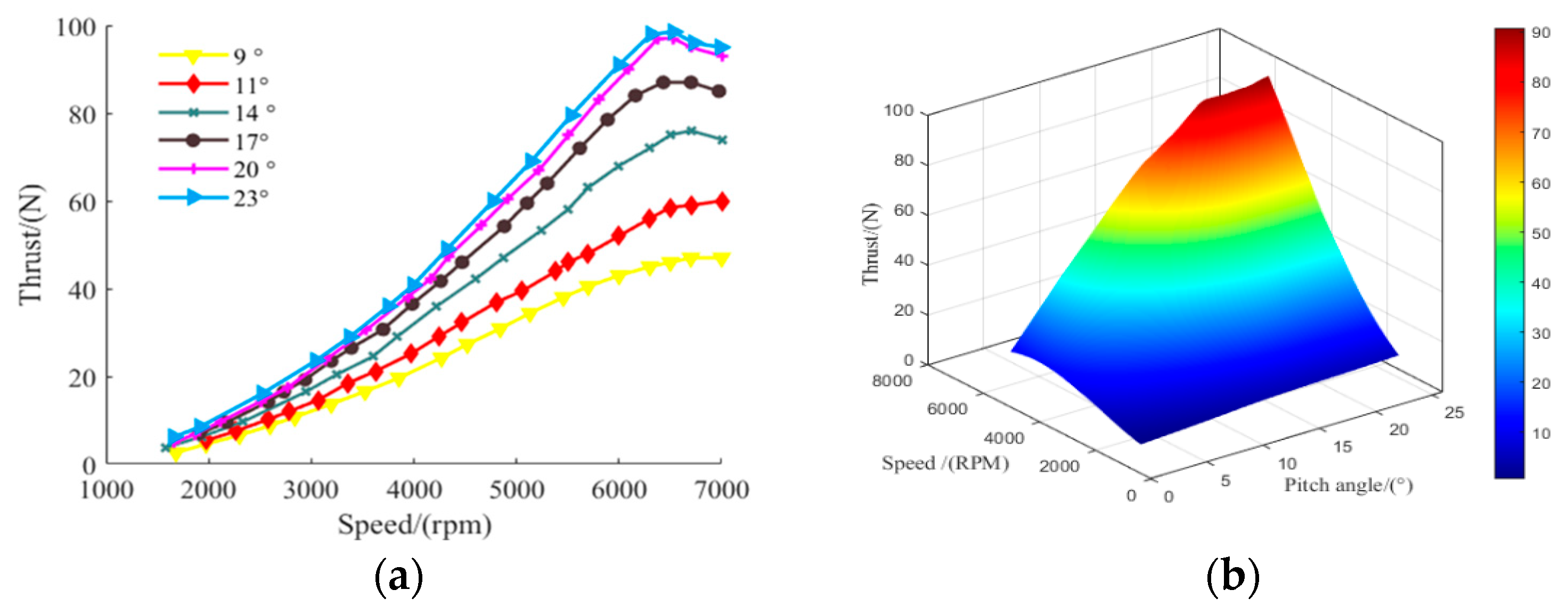
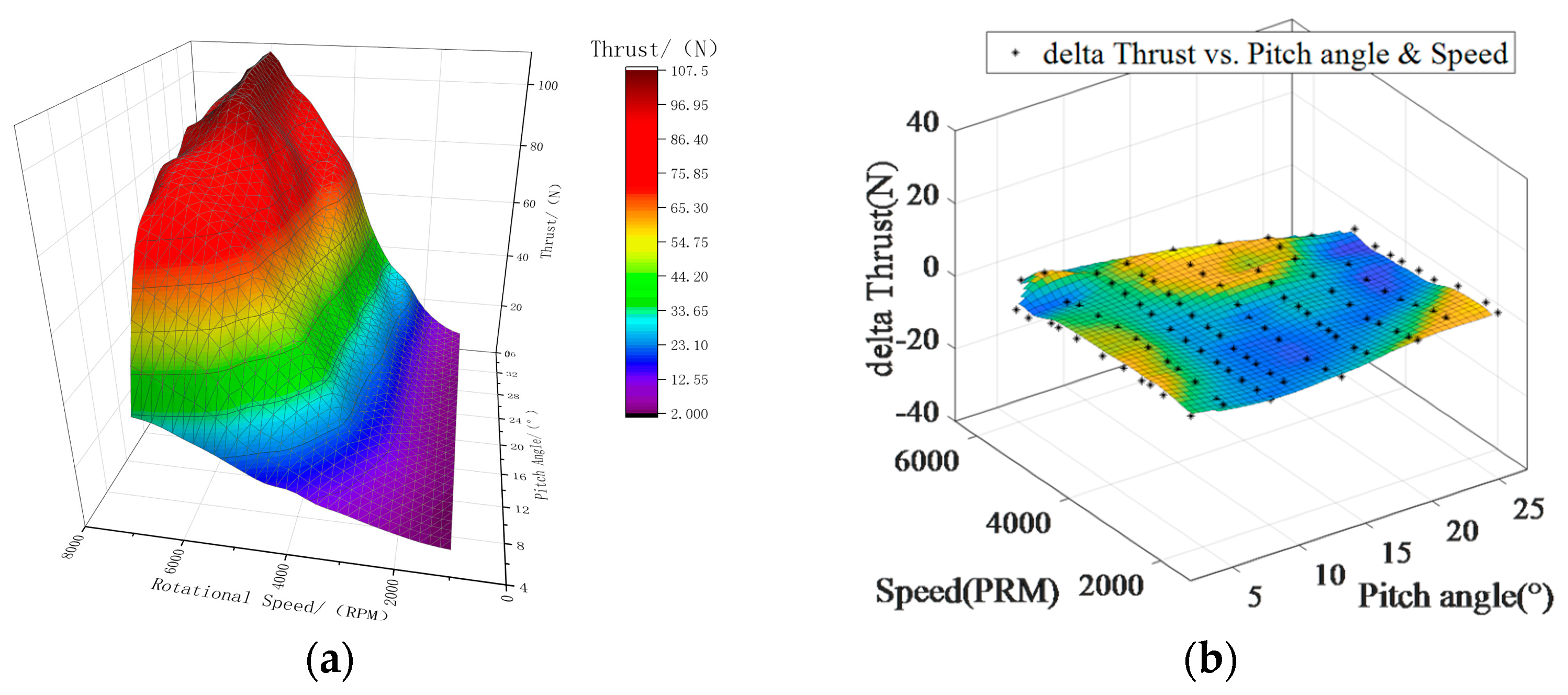
3.5. Thrust Propulsion Design
4. Results
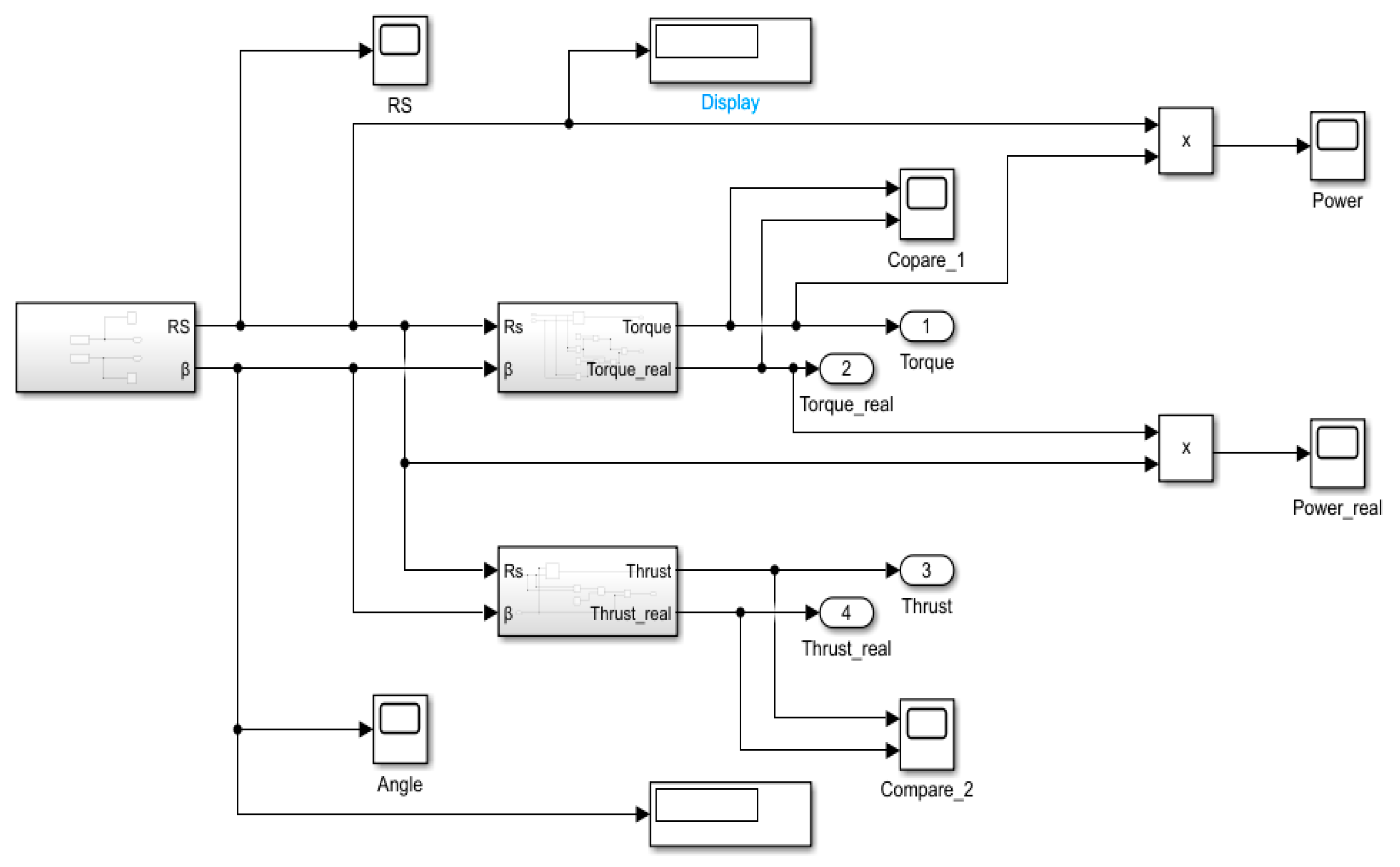
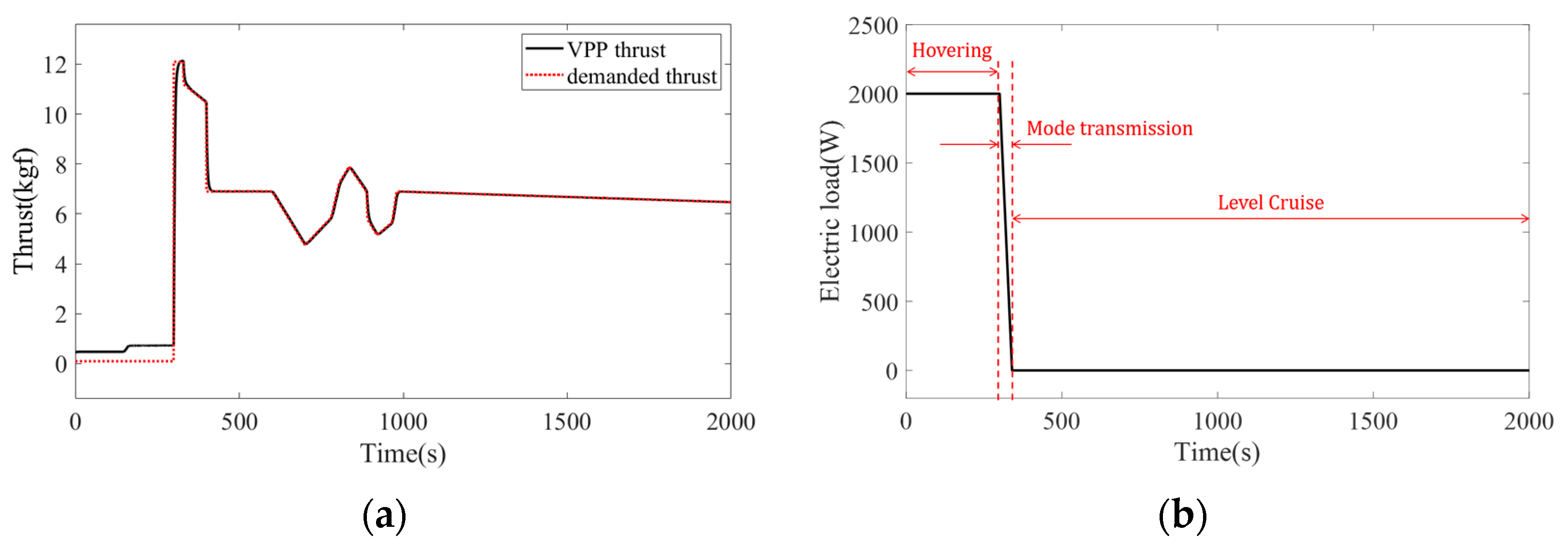
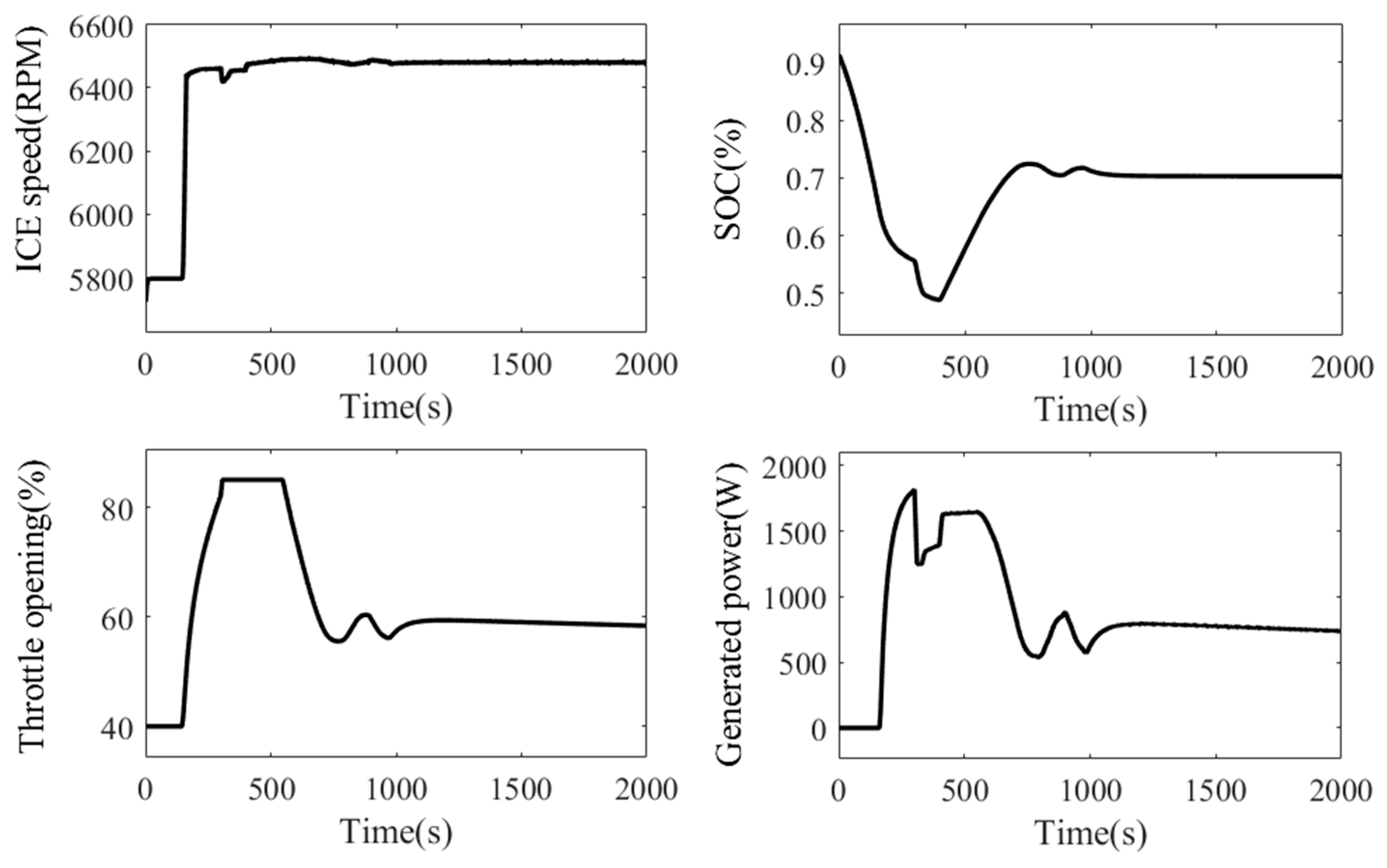
4.1. Hybrid Power System Simulation
4.2. Ground Test of Hybrid Power System
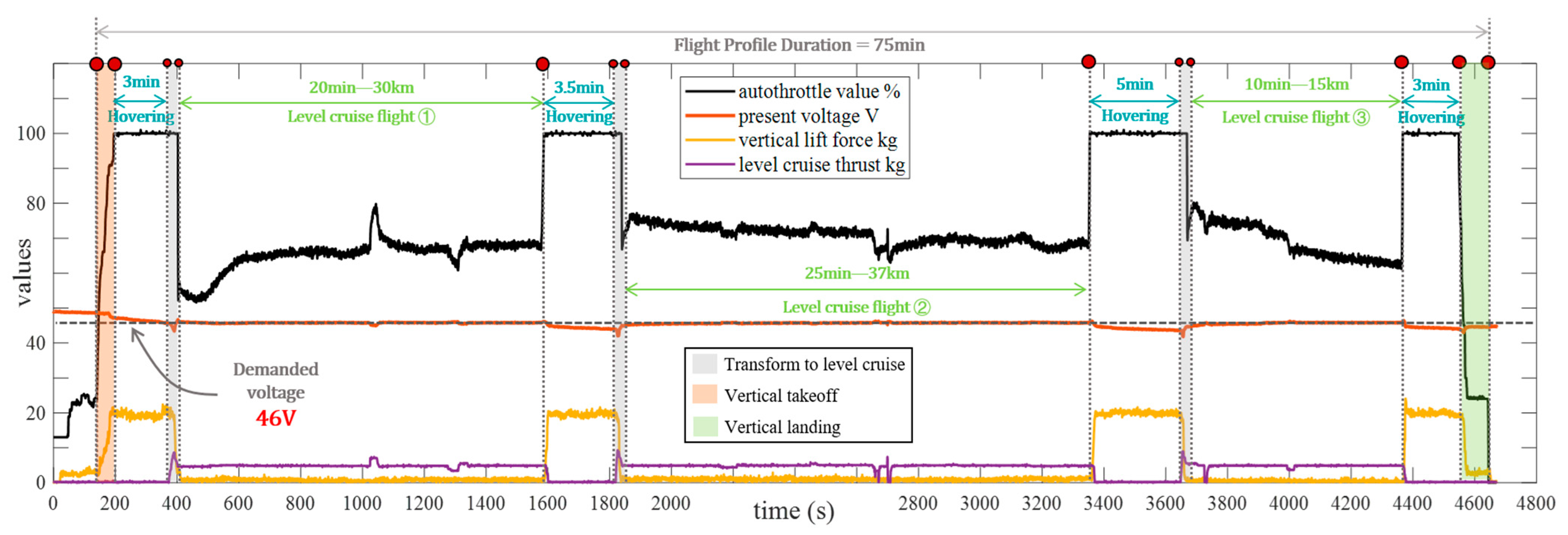
4.3. Hovering Endurance Flight Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, H.B.; Lan, Y.B.; Fritz, B.K.; Hoffmann, W.C.; Liu, S. Review of agricultural spraying technologies for plant protection using unmanned aerial vehicle (UAV). Int. J. Agric. Biol. Eng. 2021, 14, 38–49. [Google Scholar] [CrossRef]
- Guan, S.Y.; Zhu, Z.; Wang, G. A Review on UAV-Based Remote Sensing Technologies for Construction and Civil Applications. Drones 2022, 6, 117. [Google Scholar] [CrossRef]
- Mangewa, L.J.; Ndakidemi, P.A.; Munishi, L.K. Integrating UAV Technology in an Ecological Monitoring System for Community Wildlife Management Areas in Tanzania. Sustainability 2019, 11, 6116. [Google Scholar] [CrossRef]
- Yang, Z.Y.; Yu, X.Y.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV remote sensing applications in marine monitoring: Knowledge visualization and review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef] [PubMed]
- Granados-Bolanos, S.; Quesada-Roman, A.; Alvarado, G.E. Low-cost UAV applications in dynamic tropical volcanic landforms. J. Volcanol. Geotherm. Res. 2021, 410, 107143. [Google Scholar] [CrossRef]
- Ozdemir, U.; Aktas, Y.O.; Vuruskan, A.; Dereli, Y.; Tarhan, A.F.; Demirbag, K.; Erdem, A.; Kalaycioglu, G.D.; Ozkol, I.; Inalhan, G. Design of a Commercial Hybrid VTOL UAV System. J. Intell. Robot. Syst. 2014, 74, 371–393. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, H.; Zhao, Z.; Zhang, C.; Lan, Y. Modeling, System Measurements and Controller Investigation of a Small Battery-Powered Fixed-Wing UAV. Machines 2021, 9, 333. [Google Scholar] [CrossRef]
- Capello, E.; Scola, A.; Guglieri, G.; Quagliotti, F. Mini Quadrotor UAV: Design and Experiment. J. Aerosp. Eng. 2012, 25, 559–573. [Google Scholar] [CrossRef]
- Chiang, W.C.; Li, Y.Y.; Shang, J.; Urban, T.L. Impact of drone delivery on sustainability and cost: Realizing the UAV potential through vehicle routing optimization. Appl. Energy 2019, 242, 1164–1175. [Google Scholar] [CrossRef]
- Cao, J.; Anvar, A. Design, Modelling and Simulation of Maritime UAV-VTOL Flight Dynamics. Appl. Mech. Mater. 2012, 152–154, 1533–1538. [Google Scholar] [CrossRef]
- Cetinsoy, E.; Dikyar, S.; Hancer, C.; Oner, K.; Sirimoglu, E.; Unel, M.; Aksit, M. Design and construction of a novel quad tilt-wing UAV. Mechatronics 2012, 22, 723–745. [Google Scholar] [CrossRef]
- Cakir, H.; Kurtulus, D.F. Design and aerodynamic analysis of a VTOL tilt-wing UAV. Turk. J. Electr. Eng. Comput. Sci. 2022, 30, 767–784. [Google Scholar] [CrossRef]
- Czyba, R.; Lemanowicz, M.; Gorol, Z.; Kudala, T. Construction Prototyping, Flight Dynamics Modeling, and Aerodynamic Analysis of Hybrid VTOL Unmanned Aircraft. J. Adv. Transp. 2018, 2018, 7040531. [Google Scholar] [CrossRef]
- Zhang, B.W.; Song, Z.X.; Zhao, F.; Liu, C. Overview of Propulsion Systems for Unmanned Aerial Vehicles. Energies 2022, 15, 455. [Google Scholar] [CrossRef]
- Panigrahi, S.; Krishna, Y.S.S.; Thondiyath, A. Design, Analysis, and Testing of a Hybrid VTOL Tilt-Rotor UAV for Increased Endurance. Sensors 2021, 21, 5987. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Nielsen, P.; Zbigniew, B.; Bocewicz, G. Energy Consumption in Unmanned Aerial Vehicles: A Review of Energy Consumption Models and Their Relation to the UAV Routing. Adv. Intell. Syst. Comput. 2019, 853, 173–184. [Google Scholar]
- Xiong, Z.J.; Xu, Y.M.; Wang, Z.Y.; Pian, X.; Wang, Y. Preliminary Design Method and Prototype Testing of a Novel Rotors Retractable Hybrid VTOL UAV. IEEE Access 2021, 9, 161141–161160. [Google Scholar] [CrossRef]
- Panagiotou, P.; Tsavlidis, I.; Yakinthos, K. Conceptual design of a hybrid solar MALE UAV. Aerosp. Sci. Technol. 2016, 53, 207–219. [Google Scholar] [CrossRef]
- Zong, J.A.; Zhu, B.J.; Hou, Z.X.; Yang, X.; Zhai, J. Evaluation and Comparison of Hybrid Wing VTOL UAV with Four Different Electric Propulsion Systems. Aerospace 2021, 8, 256. [Google Scholar] [CrossRef]
- Matlock, J.; Sharikov, P.; Warwick, S.; Richards, J.; Suleman, A. Evaluation of energy efficient propulsion technologies for unmanned aerial vehicles. Trans. Can. Soc. Mech. Eng. 2019, 43, 481–489. [Google Scholar] [CrossRef]
- Özbek, E.; Yalin, G.; Ekici, S.; Karakoc, T.H. Evaluation of design methodology, limitations, and iterations of a hydrogen fuelled hybrid fuel cell mini UAV. Energy 2020, 213, 118757. [Google Scholar] [CrossRef]
- Pugi, L.; Berzi, L.; Franchi, L.; Casazza, A.; Mattei, G.; Fiorenzan, R.; Domina, I. Preliminary Design and Simulation of an Hybrid-Parallel, Fixed-Wing UAV with Eight-Rotors VTOL System. In Proceedings of the 2022 IEEE International Conference on Environment and Electrical Engineering and 2022 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Prague, Czech Republic, 28 June–1 July 2022. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter |
|---|---|
| Displacement | 60 mL |
| Layout | Opposed |
| Number of pistons | 2 |
| Static thrust | 15.2 kg |
| Carburetor | Wapbro |
| Performance | 5 kW/8500 RPM |
| Compression ratio | 7:1 |
| Diameter × Stroke | 36 mm × 30 mm |
| Weight | 1950 g |
| Lubrication ratio | 30:1 |
| Spark plug | NGK CM6 |
| Item | Value |
|---|---|
| Rated power | 2.5 kW |
| Number of modes | 3 |
| Rated frequency | 1353 Hz |
| Rated voltage (mode to mode) | 48 V |
| Connection type | Connection |
| Number of slots/pole pairs | 24/14 |
| Diameter of armature | 101.2 mm |
| Length of iron core | 47 mm |
| Dimension of NdFe35 | 42 mm × 20 mm × 4 mm |
| Item | Value |
|---|---|
| Reverse repetitive maximum voltage | 600–200 V |
| Reverse unrepeated maximum voltage | 1700 V |
| DC output current | 150 A |
| Forward surge current | 1500 A |
| Surge current squared time product | 11,400 A2S |
| Threshold voltage | 0.8 V |
| Slope resistance | 3.8 mΩ |
| Forward maximum voltage | 1.5 V |
| Isolation voltage | 2500 V |
| Storage temperature | −40–125 °C |
| Weight | 425 g |
| Item | Parameter |
|---|---|
| Size | 1350 mm × 850 mm × 1950 mm |
| Weight | 92 kg |
| Type of communication | 2.4 GHz wireless |
| Monitor | Integrated industrial computer |
| Time between overhaul | >30 working hours |
| Item | Parameter |
|---|---|
| Temperature | 30 °C |
| Altitude | >450 m (QNE) |
| Wind rating | >8 m/s |
| Humidity | 60% |
| MTOW | 25 kg |
| Cooling type | Air cooling |
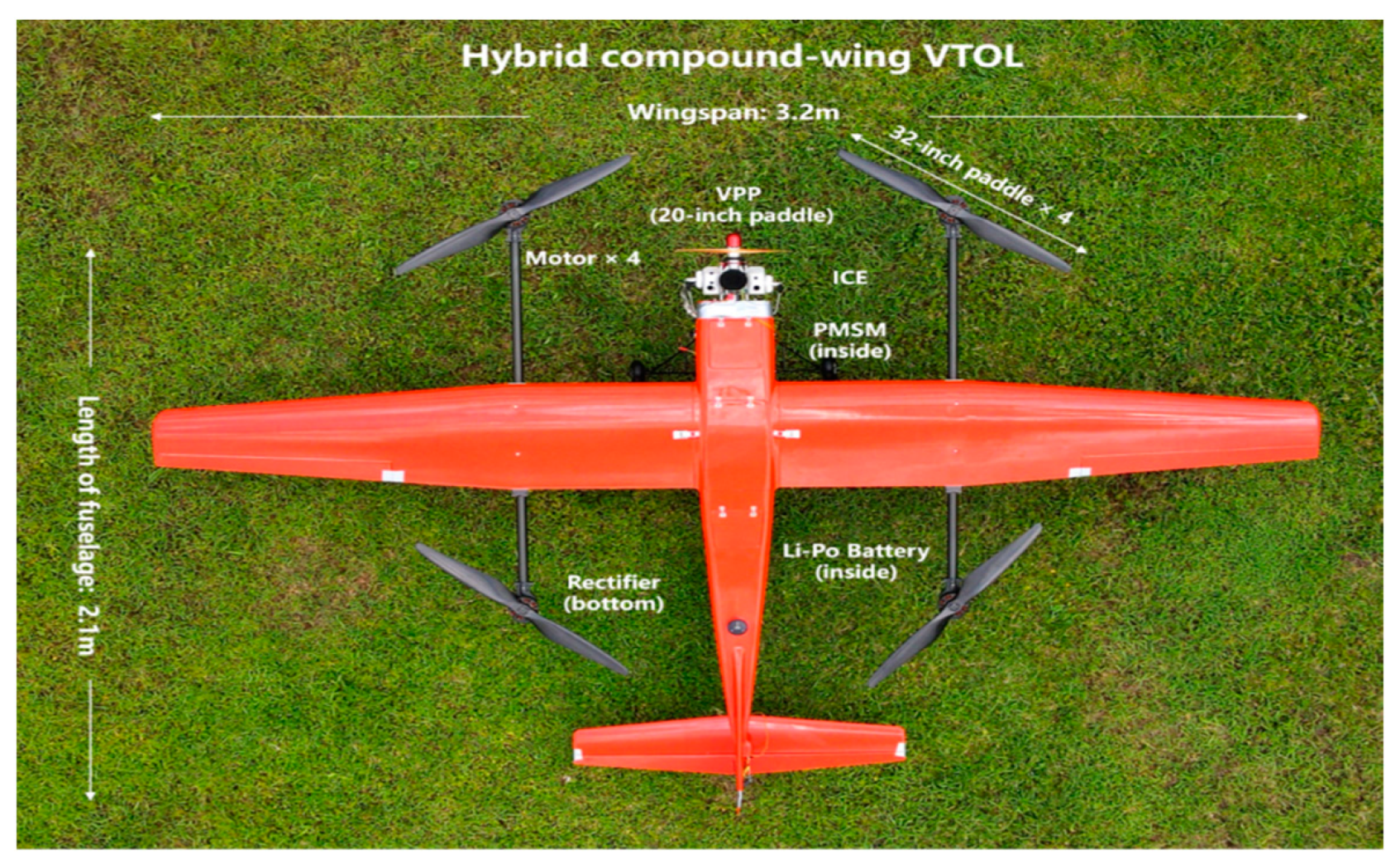
| Item | Parameter |
|---|---|
| Wingspan | 3.2 m |
| Total length | 2.1 m |
| MTOW | 25 kg |
| Fuselage weight | <19 kg |
| Battery capacity | 5200 mAH |
| Connection type of cells | 12S1P |
| Size of rotary paddle | 32 inches |
| Size of VPP’s paddle | 20 inches |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, S.; Cai, G.; Peng, X.; Dai, M.; Yang, G. The Design of Improved Series Hybrid Power System Based on Compound-Wing VTOL. Drones 2024, 8, 634. https://doi.org/10.3390/drones8110634
An S, Cai G, Peng X, Dai M, Yang G. The Design of Improved Series Hybrid Power System Based on Compound-Wing VTOL. Drones. 2024; 8(11):634. https://doi.org/10.3390/drones8110634
Chicago/Turabian StyleAn, Siqi, Guichao Cai, Xu Peng, Mingxiao Dai, and Guolong Yang. 2024. "The Design of Improved Series Hybrid Power System Based on Compound-Wing VTOL" Drones 8, no. 11: 634. https://doi.org/10.3390/drones8110634
APA StyleAn, S., Cai, G., Peng, X., Dai, M., & Yang, G. (2024). The Design of Improved Series Hybrid Power System Based on Compound-Wing VTOL. Drones, 8(11), 634. https://doi.org/10.3390/drones8110634